Изобретение относится к радиосистемам определения координат подвижных объектов, а конкретно к радиоохранным системам подвижных объектов с определением их координат при нападении на них или несанкционированном проникновении.
Известны радиоустройства, предназначенные для защиты от угона или кражи отдельных частей автомашины, содержащие сигнальный радиопередатчик с датчиками, установленными в выбранных местах автомашины, и небольшой переносной радиоприемник. При несанкционированном проникновении внутрь автомашины или попытке кражи отдельных ее частей происходит срабатывание соответствующего датчика, включающего сигнальный радиоперадатчик, излучающий через антенну радиосигналы тревоги в виде кодированных радиоимпульсов, код которых относится только к данной автомашине. Указанный выше небольшой радиоприемник, находящийся у владельца автомашины, принимает эти радиосигналы, и владелец получает возможность предпринять необходимые меры против злоумышленника.
Такая система имеет, однако, ограниченную эффективность, так как владелец может не успеть прибыть к месту стоянки своей автомашины до ее угона, может оказаться самостоятельно не в состоянии противостоять злоумышленнику или может оказаться вне зоны приема сигналов тревоги.
К современны радиоохранным системам должны быть предъявлены два основных требования:
система должна обеспечить прием радиосигналов тревоги не только владельцами охраняемого подвижного объекта, но главным образом правоохранительными органами;
система должна обеспечить возможность определения по радиосигналам тревоги координат подвижного объекта с источником сигнала тревоги в любом месте нахождения на охраняемой территории, его принадлежность и передачу этой информации правоохранительным органом.
Кроме того, наиболее совершенные радиоохраняемые системы должны обеспечить
оповещение владельца охраняемого объекта о приеме правоохранительными органами возникшего сигнала тревоги;
возможность контроля владельцем подвижного объекта того, что в данном месте его расположения объект действительно находится в зоне действия радиоохранной системы;
возможность приема кодированных радиосигналов приемным устройством охраняемой автомашины от милицейской патрульной службы при угоне автомашины для ее дистанционного останова;
возможность использования радиосистемы для передачи пейджерового сообщения.
Известен ряд систем для определения координат подвижных объектов (см., например, Справочник геодезиста, книга 2. М.: Недра, 1985, с. 48-50 и Х. Камен. Электронные способы измерения в геодезии. Недра, 1982, с. 207-214). Однако ни один из опубликованных в этой литературе вариантов определения координат подвижных объектов не может быть использован в радиоохранных системах, так как в описанных системах обработка и выдача результатов измерений производятся на самом подвижном объекте, а не в системе правоохранительных органов, как это в данном случае требуется.
Известна также система определения координат подвижных объектов по патенту Великобритании N 2218835, кл. G 08 B 25/00, 1989, в которой на подвижном объекте размещают источник сигналов тревоги (абонентский сигнализатор), а в районах предполагаемого нахождения объекта равномерного размещают сеть пунктов с базисными станциями, связанными по линии связи с пунктом вычисления координат (центральной станцией).
Известный способ осуществляется следующим образом. После включения на подвижном объекте абонентского радиосигнализатора излучаемые радиосигналы принимаются радиоприемниками базисных станций, которые в свою очередь формируют выходные сигналы, пропорциональные уровню принятых сигналов. Блок обработки центральной станции по величинам уровня сигналов не менее трех базисных станций определяет ориентировочное местонахождение подвижного объекта.
Устройство, используемое в этом способе, содержит не менее одного абонентского сигнализатора, выполненного с возможностью установки его на подвижном объекте, не менее трех базисных станций, выполненных каждая с радиоприемной частью, узлом преобразования сигналов, узлом передачи сигналов, не менее одной центральной станции с блоком обработки и вычислителем и канал связи, соединяющей базисные и центральную станции.
К недостаткам этого технического решения следует отнести весьма низкую точность, обусловленную свойствами параметра, используемого при обработке радиосигнала - его уровня, а также необходимости большой плотности базисных станций.
Наиболее близкой к предлагаемым способу и устройству является система определения координат подвижных объектов по патенту Российской Федерации N 2036431, кл. G 01 C 22/00, 1995, в которой на подвижном объекте размещают источник сигналов тревоги (абонентский сигнализатор), а в районах предполагаемого нахождения объекта равномерно размещают сеть пунктов с базисными станциями, связанными по линии связи с пунктом вычисления координат (центральной станции).
Известный способ определения координат подвижных объектов включает в себя последовательное излучение с помощью абонентского радиосигнализатора, установленного на подвижном объекте, кодового управляющего радиосигнала, кодового адресного радиосигнала и измерительных радиосигналов в виде пар посылок модулированных синусоидальных колебаний с близкими частотами модуляции, прием и обработку этих радиосигналов на не менее чем трех базисных станциях, размещенных в точках с известными координатами, передачу по каналу связи на центральную станцию обработанных измерительных сигналов от каждой базисной станции, измерение параметров переданных сигналов и обработку результатов измерения с вычислением координат подвижного объекта не менее чем по двум разностям расстояний между абонентским сигнализатором и базисными станциями.
Устройство, используемое в данном способе, содержит не менее одного абонентского сигнализатора, выполненного с возможностью установки его на подвижном объекте и последовательного излучения кодированного управляющего сигнала, кодированного адресного сигнала и измерительного сигнала в виде первой пары посылок модулированных синусоидальных колебаний с одинаковой несущей частотой и близкими частотами модуляции, не менее трех базисных станций, выполненных каждая с радиоприемной частью, узлом преобразования сигналов, узлом передачи сигналов, не менее одной центральной станции с блоком обработки и вычислителем и канал связи, соединяющей базисные и центральную станции.
Недостаток прототипа заключается в том, что поскольку базисные станции системы не имеют гетеродинов, а для создания гетеродинных колебаний для смесителя измерительного канала приемника используется одна опорная станция, излучающая для всей сети базисных станций гетеродинные сигналы в виде модулированных синусоидальных колебаний с частотой модуляции, равной среднему значению частот модуляции измерительных посылок, и если необходимо охватить охраной большую территорию, при которой одна опорная станция из условия распространения радиоволн, не может давать гетеродальные колебания для всех базисных станций, то приходится использовать дополнительные опорные станции на разных несущих частотах и, как следствие, приходится использовать дополнительные несущие частоты в добавок к двум несущим частотам, используемым в системе. И кроме того, в системе отсутствует возможность получения абонентом информации о поступлении сигнала тревоги (или контрольного сигнала) на центральную станцию и тем самым контролировать в любом месте находится ли объект с сигнализатором в зоне действия охранной системы.
Задачей, на решение которой направлено изобретение, является получение высокой точности определения местоположения множества подвижных объектов при одновременном упрощении реализации за счет достижения нового технического результата, заключающегося в использовании одной радиочастоты независимо от протяженности охраняемой территории, в получении абонентом уведомления о поступлении его сигнала правоохранительными органами, в получении возможности контроля абонентом находится ли подвижный объект в зоне действия охранной системы, в получении возможности передавать пейджеровые сообщения с подвижного объекта на любой пейджер с известным номером.
Поставленная задача в части способа достигается за счет того, что по способу определения координат подвижных объектов, включающему последовательное излучение с помощью абонентского радиосигнализатора, установленного на подвижном объекте, кодового управляемого радиосигнала, кодового адресного радиосигнала и измерительного радиосигнала в виде первой пары посылок модулированных синусоидальных колебаний с близкими частотами модуляции, прием и обработку этих радиосигналов на не менее чем трех базисных станциях, размещенных в точках с известными координатами, передачу по каналу связи на центральную станцию обработанных измерительных сигналов от каждой базисной станции, измерение параметров переданных сигналов и обработку результатов измерения, согласно изобретению в точках с известными координатами дополнительно размещают стационарные сигнализаторы, с помощью которых излучают вторые пары посылок модулированных синусоидальных колебаний с параметрами, совпадающими с параметрами первых пар посылок, управляющие кодовые радиосигналы после их дешифрирования на базисных станциях используют для разделения кодового адресного и измерительного сигналов, адресные кодовые сигналы без изменения направляют по каналу связи на центральную станцию, где после отбора сигналов, пришедших в одно и тоже время от различных базисных станций и относящихся к одному и тому же абонентскому сигнализатору, направляют на одну из базисных станций по каналу связи ответный сигнал, разрешающий включение стационарного сигнализатора после окончания излучения измерительного сигнала, перед передачей измерительных сигналов на центральную станцию осуществляют их предварительную обработку в измерительных каналах базисных станций, гетеродин которых модулируют синусоидальными колебаниями с частотой, равной полусумме частот модуляции, при этом предварительную обработку осуществляют путем выделения колебания низкой частоты, равной разности частоты модуляции посылок измерительного сигнала и частоты модуляции гетеродина измерительного канала, передачу обработанного измерительного сигнала на центральную станцию производят в цифровом виде и при оцифровке результатов обработки измеряют интервалы времени от моментов возникновения дешифрованного управляющего сигнала до моментов прохождения через ноль синусоид выделенной низкой частоты, при обработке результатов измерений учитывают разности измеренных интервалов времени в каждой паре посылок измерительных сигналов и разности между полученными результатами первой и второй пар посылок и на центральной станции определяют разности пар расстояний между подвижным объектом и базисными станциями, а по не менее чем двум указанным разностям вычисляют координаты подвижного объекта.
В части устройства поставленная задача достигается за счет того, что устройство для определения координат подвижных объектов, содержащем не менее одного абонентского сигнализатора, выполненного с возможностью установки его на подвижном объекте и последовательного излучения кодового управляющего сигнала, кодового адресного сигнала и измерительного сигнала в виде первой пары посылок модулированных синусоидальных колебаний с близкими частотами модуляции, не менее трех базисных станций, выполненных каждая с радиоприемной частью, узлом преобразования сигналов, узлом передачи сигналов, не менее одной центральной станции, содержащей вычислительный блок, канал связи, соединяющий базисные и центральную станции, согласно изобретению, снабжено стационарным сигнализатором, выполненным с возможностью излучения второй пары посылок модулированных синусоидальных колебаний вслед за излучением абонентским сигнализатором первой пары посылок модулированных синусоидальных колебаний с такими же параметрами, узел преобразования сигналов каждой базисной станции выполнен в виде измерительного канала, кодового канала, контроллера, измерительный канал содержит смеситель, гетеродин, сигнал которого модулируют синусоидальными колебаниями частотой, равной полусумме частот модуляции пар посылок и с возможностью выделения колебаний низкой частоты, равной разности частоты модуляции посылок измерительного сигнала и частоты модуляции гетеродина измерительного канала, и подключен к выходу радиоприемной части, кодовый канал выполнен с возможностью пропускания адресных кодовых сигналов и подключен к выходу радиоприемной части, контроллер выполнен с возможностью дешифрации управляющих кодовых сигналов, с возможностью оцифровки результатов обработки сигналов путем измерения интервалов времени между моментом возникновения дешифрованного кодового управляющего сигнала и моментами прохождения через ноль синусоид выделенной низкой разностной частоты и подключен к выходам измерительного и кодового каналов и к каналу связи с центральной станцией, при этом центральная станция выполнена с многоканальным входом с числом каналов не меньше числа базисных станций, с блоком контроллеров и вычислительным блоком, а каналы связи выполнены в виде проводных линий или световодных линий, или радиолиний, или комбинированных линий.
В частном случае реализации изобретения абонентский сигнализатор может быть выполнен с радиоприемной частью и с возможностью контрольного последовательного излучения кодового управляющего радиосигнала, кодового адресного радиосигнала и первой пары посылок модулированных синусоидальных колебаний, при этом радиоприемная часть соединена с введенным индикатором контроля нахождения подвижного объекта в зоне действия охранной системы.
Кроме того, центральная станция может быть выполнена с возможностью передачи пейджерового сообщения о тревоге для владельца подвижного объекта, а абонентский сигнализатор может быть выполнен с возможностью передачи либо сигнала тревоги, либо пейджерового кодированного сообщения вслед за окончанием излучения своего кодового адресного радиосигнала и снабжен кодирующим узлом набора пейджерового сообщения.
На фиг. 1 изображена схема сигнального передатчика (абонентского сигнализатора); на фиг. 2 - временная диаграмма функционирования радиоохранной системы; на фиг. 3 - структурная схема базисной станции; на фиг. 4 - структурная схема центральной станции; на фиг. 5 - структурная схема абонентского агрегата, согласованного с кодирующим узлом для формирования пейджерового сообщения; на фиг. 6 - структурная схема абонентского сигнализатора, согласованного с кодирующим узлом для формирования пейджерового сообщения.
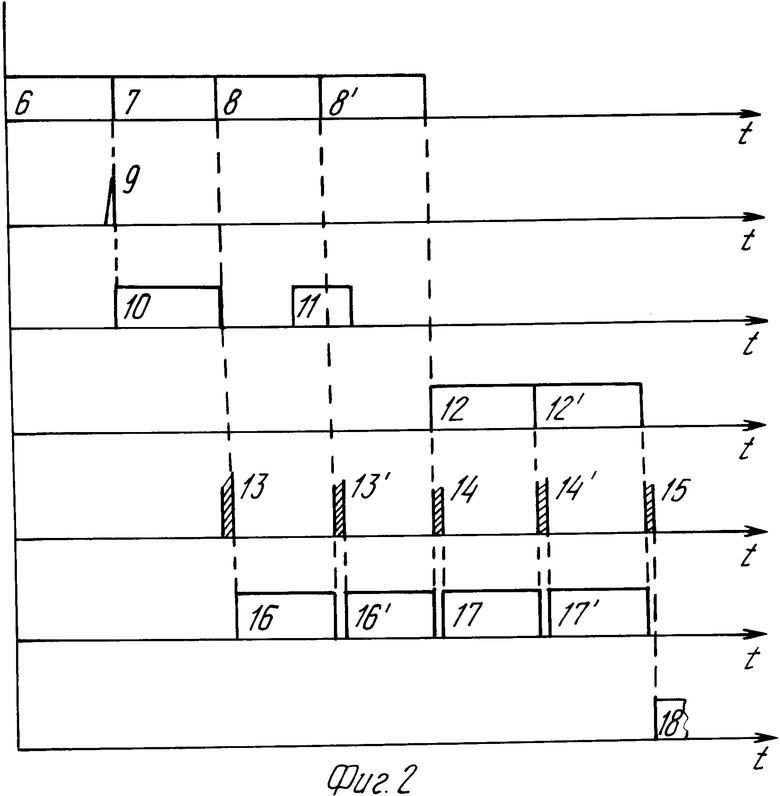
На фигурах 1 - формирователь модулирующего сигнала, 2 - модулятор, 3 - ЧМ-генератор, 4 - усилитель мощности, 5 - антенна сигнализатора, 6 - кодированная посылка, 7 - вторая кодированная посылка, 8, 8' - измерительные посылки первой пары, 9 - управляющий импульс, 10 - адресный кодовый сигнал, 11 - обратный сигнал, 12 - измерительные посылки второй пары, 12, 13', 14, 14', 15 - выделенные нестационарные части сигналов, 16, 16', 17, 17' - выделенные стационарные части сигналов, 18 - информация, содержащая результаты обработки обоих измерительных посылок, 19 - радиоприемная часть, 20 - измерительный канал, 21 - кодовый канал, 22 - контроллер, 23 - стационарный сигнализатор, 24 - антенный переключатель, 25 - антенна, 26 - канал (линия) связи с центральной станцией, 27 - усилитель высокой частоты, 28 - преселектор, 29 - смеситель, 30 - гетеродин, 31 - усилитель промежуточной частоты (УПЧ - 1), 32 - смеситель, 33 - гетеродин, 34 - модулятор, 35 - кварцевый генератор, 36 - усилитель промежуточной частоты (УПЧ - 2), 37 - амплитудный детектор, 38 - узкополосный усилитель низкой частоты (УНЧ), 39 - смеситель, 40 - гетеродин, 41 - усилитель промежуточной частоты (УПЧ - 3), 42 - ограничитель, 43 - частотный детектор, 44 - многоканальный блок приема информации, 45 - многоканальный блок контроллеров сбора информации, 46 - блок главного компьютера, 47 - контроллер главного компьютера сбора информации, 48 - главный компьютер, предназначенный для вычисления координат подвижных источников сигналов, 49 - база данных, 50 - терминальные компьютеры пользователей, 51 - приемная часть абонентского агрегата, 52 - ключевая схема, 53 - канал прохождения контрольного сигнала, 54 - группа дешифраторов, 55 - индикатор, 56 - блок подготовки исполнительных сигналов, 57 - антенный переключатель, 58 - группа сигналов, 59 - кодирующий узел, 60 - элемент согласования кодирующего узла с модулятором сигнализатора.
Предлагаемая радиоохранная система содержит множество сигнальных передатчиков (абонентских сигнализаторов), есть (не менее трех) базисных станций и не менее одной центральной станции, где определяются категории сигнала тревоги (несанкционированное проникновение в охраняемый объект, разбойное нападение, угон автомашины, пожар, вызов скорой помощи, контрольное излучение сигнала, пейджеровое сообщение и пр.), принадлежность абонентского сигнализатора. Координаты подвижного абонентского сигнализатора определяются разностно-дальномерным способом не менее чем по двум разностям расстояний между абонентским сигнализатором и базисными станциями. Кроме того, при излучении сигнализатором контрольного кодированного сигнала в системе предусмотрена возможность индикаторной регистрации абонентским сигнализатором ответного сигнала, свидетельствующего о поступлении сигнала на центральную станцию и соответственно о том что абонент находится в зоне действия охранной системы.
На фиг. 1 обозначено: 1 - формирователь модулирующего сигнала (сигнал тревоги или контрольный сигнал) сигнализатора, 2 - модулятор, 3 - ЧМ-генератор, 4 - усилитель мощности, 5 - антенна сигнализатора.
Сигнал тревоги, формируемый формирователем 1, состоит из двух кодированных и двух измерительных посылок, последовательность которых указана на фиг. 2. Первой кодированной посылкой 6 является управляющий сигнал, необходимый для фиксирования момента начала обработки принятых сигналов на базисных станциях; передача управляющего сигнала в виде кодированной посылки вызвана необходимостью обеспечения ее высокой помехозащищенности. Вторая кодированная посылка 7 является адресной, по ней на центральной станции определяется категория сигнала тревоги и принадлежность источника сигнала тревоги. Измерительные посылки 8 и 8' представляют собой синусоидальные колебания с разными частотами модуляции, отличающимися на малую выбранную величину от среднего значения (например, частоты модуляции посылок составляют 9,5 и 10,5 кГц, среднее значение равно 10 кГц, обе частоты отличаются от среднего значения на 0,5 кГц).
Рассмотренным выше сигналом тревоги модулируется с помощью модулятора 2 генератор радиочастоты 3, причем здесь может быть использована как амплитудная, так и частотная модуляция. Данная система рассматривается применительно к использованию частотной модуляции, как более предпочтительной.
Модулированный сигнал тревоги усиливается усилителем мощности 4 и излучается антенной 5.
В качестве измерительного сигнала помимо указанной пары посылок 8 и 8' используется вторая пара посылок 12 и 12', идентичная первой паре посылок и излучаемая одним из стационарных сигнализаторов вслед за первой парой измерительных посылок, также являющаяся частотно-модулированной с той же частотой несущей и модулирующих колебаний, что и первая измерительная посылка. Структурная схема стационарного сигнализатора такая же, как и на фиг. 1.
Стационарные сигнализаторы должны быть установлены на местности в точках с известными координатами - либо непосредственно в базисных станциях, образуя при этом с ней единый базисный блок с использованием антенного переключателя для обеспечения приема и излучения сигналов одной антенной, либо в других точках в виде автономного блока со своей схемой управления включением сигнализатора и со своей антенной. В последнем случае к стационарному сигнализатору должна быть подведена самостоятельная линия связи с центральной станцией, что несколько усложняет систему.
В дальнейшем в качестве примера реализации рассматривается только вариант размещения стационарного сигнализатора совместно с базисной станцией, как наиболее предпочтительный.
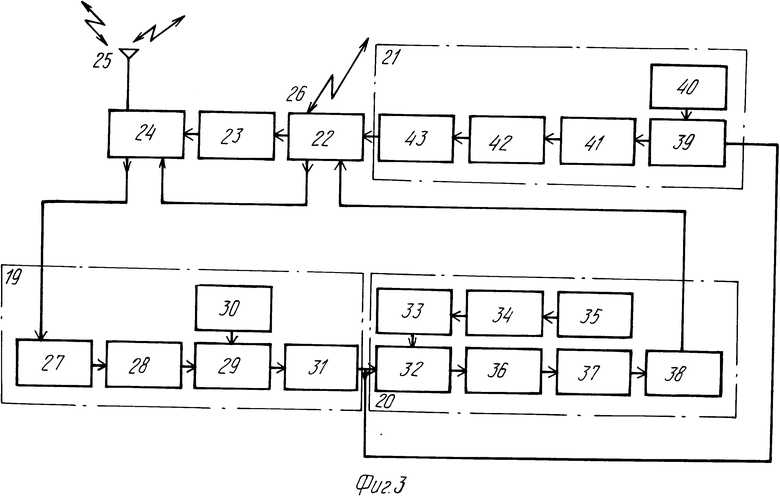
Представленная на фиг. 3 структурная схема базисной станции, содержит радиоприемную часть 19, измерительный канал 20, кодовый канал 21, контроллер 22, стационарный сигнализатор 236 антенный переключатель 24, антенну 25 и канал связи с центральной станцией 26.
На вход радиоприемной части 19 попадает излучаемый абонентским сигнализатором сигнал тревоги с кодовой частью и первой парой измерительных посылок и сигнал, излучаемый одним из стационарных сигнализаторов, содержащий вторую пару измерительных посылок. Причем, если стационарный сигнализатор входит в состав рассматриваемой базисной станции, то на вход ее приемной части 19 вторая пара измерительных посылок попадает в результате просачивания через антенный переключатель 24, для остальных базисных станций, принимающих сигнал тревоги, вторая пара измерительных посылок принимается непосредственно антенной. Принятый сигнал тревоги проходит усилитель высокой частоты 27 и преселектор 28. Далее с помощью смесителя 29, гетеродина 30 и УПЧ - 1 31 проводится снижение частоты до значения, удобного для дальнейшей обработки сигнала.
Сигнал тревоги затем попадает на два входа - на входы измерительного канала 20 и кодового канала 217
Измерительный канал 20 содержит смеситель 32 с гетеродином 33, частота которого модулируется с помощью модулятора 34 кварцевым генератором 35, усилитель промежуточной частоты (УПЧ - 2) 36, амплитудный детектор 37 и узкополосный усилитель низкой частоты (УНЧ) 38. Разность частот несущих колебаний сигналов тревоги и гетеродина 33 выбирают равной промежуточной частоте приемника в измерительном канале.
Гетеродинный сигнал в измерительном канале имеет особенность, состоящую в том, что он промодулирован по частоте. Поэтому необходимо рассмотреть характер сигнала на выходе смесителя 32 при таком гетородинном сигнале. Следует при этом учитывать, что с выхода измерительного канала используется только измерительная часть сигнала, а кодовая часть оказывается закрытой для прохождения действием соответствующих элементов контроллера. В результате такого рассмотрения было получено, что если на вход смесителя 32 действуют два частотно-модулированных колебания - первая измерительная посылка сигнала тревоги и гетеродинный сигнал:
eA= εAcos[ωAt+mAsin(ΩAt+φA)+ϕA];
где индекс
A относится к первой измерительной посылке сигнала, а индекс г - к гетеродинному сигналу, eвх - суммарный сигнал на входе смесителя, то напряжение eс на входе УПЧ - 2 36 будет равно ec= εc{1+0,5mAmгcos[ΔΩt+(φAφг)]cos[ωпрt+ϕ]}, , т.е. представляет собой амплитудно-модулированный сигнал с низкой частотой модуляции, равной ΔΩ = ΩA-Ωг. .
Аналогичный результат получается для остальных трех измерительных посылок.
Таким образом, в результате действия на входе смесителя 32 четырех измерительных посылок сигнала тревоги и модулированного гетеродина на выходе УПЧ - 2 36 образуются четыре амплитудно-модулированные посылки с низкой и одинаковой частотой модулирующих колебаний. При этом допустимая неодинаковость значений частот модуляции в абонентском и стационарном сигнализаторах, а также частот модуляции гетеродинов в разных базисных станциях и требующаяся стабильность частоты этих колебаний, влияющие на указанные низкочастотные колебания, как показывает анализ, легко обеспечиваются существующими известными средствами. Напряжение с выхода УПЧ-2 36 детектируется амплитудным детектором 37 и усиливается далее узкополосным усилителе низкой частоты 38, выход которого подключен к контроллеру 22.
С выхода УПЧ-1 31 радиоприемной части 19 напряжение подается также на кодовый канал 21, содержащий смеситель 39 с гетеродином 40, УПЧ-3 41, с помощью которых частота колебаний кодового канала снижается до значения, при котором оказывается возможным обеспечить нужную ширину полосы пропускания канала, ограничитель 42 и частотный детектор 43. Выход частотного детектора подключен к контроллеру 22.
Контроллер 22 содержит дешифратор управляющего кодового сигнала, на выходе которого образуется управляющий импульс 9 (фиг. 2). Этот импульс управляет последовательностью включения кодового и измерительного каналов и используется также при оцифровке измерительных сигналов.
Адресные кодовые сигналы с базисных станций без задержек направляются по линиям связи 26 на центральную станцию.
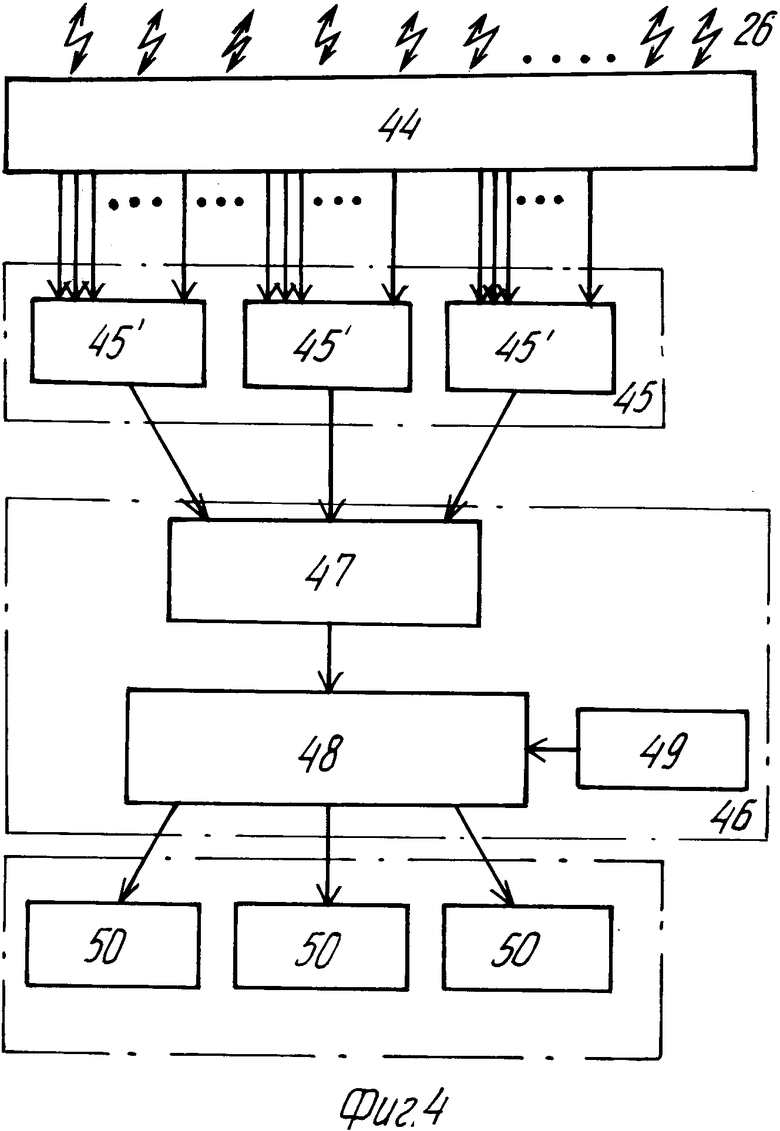
На центральной станции, структурная схема которой представлена на фиг. 4, все направленные базисными станциями адресные кодовые сигналы 10 поступают на вход многоканального блока приема информации 44. Здесь производится отбор номеров линий связи с базисными станциями, от которых одновременно поступили сообщения 10, относящиеся к одному и тому же абонентскому источнику сигналов тревоги. Далее из этих номеров базисных станций отбирается один номер, относящийся к базисной станции с наибольшей высотой антенны (отбор может производиться и по другому заранее установленному признаку), и на нее по линии связи направляется обратный сигнал 11 (фиг. 2).
Сигнал 11 дает разрешение на включение стационарного сигнализатора 23, а само включение этого сигнализатора происходит от сигнала, возникающего сразу после окончания первой пары измерительных посылок. Длительность излучения стационарным сигнализатором 23 второй пары измерительных посылок должна быть равна длительности первой пары измерительных посылок. На время излучения стационарным сигнализатором второй пары измерительных посылок импульсом нужной длительности с контроллера 22 производится переключение антенны 25 с помощью антенного переключателя 24 с режима приема сигналов в режим излучения.
Из возникающих на выходе измерительного канала 20 синусоидальных колебаний контроллер 22 выделяет стационарные части 16, 16', 17, 17', которые используются при цифровой обработке информации, а нестационарные части сигналов 13, 13', 14, 14' и 15 при этом не используются.
После завершения цифровой обработки измерительных посылок в базисных станциях (см. ниже анализ фазовых соотношений в системе) с них на блок 44 центральной станции по линиям связи 26 направляется информация 18 (фиг. 2), содержащая результаты обработки обоих измерительных посылок (см. ниже анализ фазовых соотношений в системе).
В постоянной памяти блока 44 содержатся значения координат всей сети базисных станций и высот их антенн. В блоке 44 производится предварительная обработка поступающей информации 18, а с его выхода информация поступает на многоканальный блок контроллеров сбора информаций 45. При большом количестве базисных станций блок 45 может быть выполнен из нескольких многоканальных контроллеров сбора информации (например, если число базисных станций составляет 32, то блок 45 может состоять из четырех восьмиканальных контроллеров 45'). Принятая контроллерами информация в них запоминается и в определенной последовательности передается на блок главного компьютера 46, содержащий контроллер главного компьютера сбора информации 47, главный компьютер 48 с базой данных 49. С помощью главного компьютера 48 с использованием информации, содержащейся в базе данных 49, определяют необходимые сведения о владельце источника сигнала тревоги и вычисляются координаты подвижного источника сигналов тревоги. Полученная информация передается далее на соответствующий терминальный компьютер пользователя 50, расположенный на территории той службы, к которой должна поступать данного вида информация.
Координаты источника сигнала тревоги определяются по разностям фаз между синусоидальными сигналами измерительных посылок, полученными не менее, чем от трех базисных станций от одного и того же источника сигнала тревоги. Связь указанных разностей фаз и разностей расстояний между источником сигнала тревоги и тремя разными базисными станциями можно установить из анализа фазовых соотношений в системе.
Рассмотрим фазовые соотношения в системе. При этом будем использовать угловые частоты сигналов, но в излагаемом тексте слово "угловые" для простоты записи будем опускать.
Мгновенная фаза модулирующих колебаний первой измерительной посылки сигналов тревоги в точке излучения равна
ηA(t) = ΩAt+φA, ,
где
ΩA - частота модулирующих колебаний измерительной посылки;
φA - начальная фаза этих колебаний.
Мгновенные фазы этих колебаний в точках приема трех базисных станций будут равны ,
,
где
r1, r2, r3 - расстояние между точкой излучения сигнала тревоги и точкой приема соответствующей базисной станции;
τ1, τ2, τ3 - время прохождения радиоволн между точками излучения и приема;
V - скорость распространения радиоволн.
Мгновенные фазы модулирующих колебаний гетеродинных сигналов на трех базисных станциях равны ,
,
где
Ωг - частота модулирующих колебаний гетеродинного сигнала на базисных станциях;
ϕ1, ϕ2, ϕ3 - начальные фазы этих колебаний.
Здесь принято, что частоты Ωг -одинаковы на всех базисных станциях. В действительности, вследствие неточности начальной установки частоты и их нестабильности они будут отличаться, но при анализе это отличие учитывается в фазах ϕ1, ϕ2, ϕ3. . Как показывает анализ, при относительной разности частот в пределах 10-4 она практически не оказывает заметного влияния на точность измерений.
Мгновенные фазы модулирующих колебаний сигналов на выходе измерительных каналов базисных станций будут равны разности мгновений фаз модулирующих колебаний измерительной посылки сигнала тревоги и модулирующих колебаний гетеродинного сигнала: ,
,
где
ΔΩ = ΩA-Ωг. .
С учетом фазовых задержек модулирующих колебаний в высокочастотных цепях радиоприемной части станций 19 и измерительном канале 20 получаем ;
; ,
,
где
α1, α2, α3 - фазовые задержки модулирующих колебаний частоты ΩA в высокочастотных цепях приемной части станции 19;
β1, β2, β3 - фазовые задержки колебаний частоты ΔΩ в измерительном канале 20.
Далее в контроллерах 22 базисных станций производится оцифровка полученных результатов для Δη и их запоминание.
Мгновенная фаза модулирующих колебаний второй измерительной посылки сигналов тревоги в точке излучения равна
Действуя теперь так же, как и для первой измерительной посылки, получим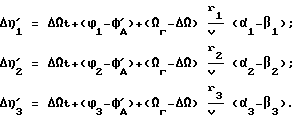 .
.
Эти данные в контроллерах 22 базисных станций оцифровываются и запоминаются. Далее в них производятся вычисления ,
,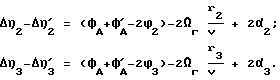 .
.
Полученные результаты направляют на центральную станцию, где производятся следующие вычисления: ,
,
и далее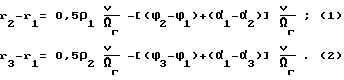 .
.
В выражения для (r2-r1 и r3-r1) входят неопределенные величины  , для исключения которых используют результаты анализа фазовых соотношений, возникающих при излучении второй пары посылок стационарным сигнализатором.
, для исключения которых используют результаты анализа фазовых соотношений, возникающих при излучении второй пары посылок стационарным сигнализатором.
Пусть третья и четвертая измерительные посылки излучаются стационарным сигнализатором, размещенным в базисной станции N 1. Мгновенные фазы модулирующих колебаний третьей измерительной посылки в трех точках размещения базисных станций будут при этом равны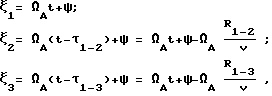 ,
,
где
ΩA= Ωг+ΔΩ; ;
ψ - начальная фаза модулирующих колебаний третьей измерительной посылки;
R1-2, R1-3 - расстояние между первой базисной станцией;
τ1-2, τ1-3 - время прохождения радиоволн между первой базисной станцией и соответственно второй и третьей базисной станцией.
Действуя теперь так же, как и для первой измерительной посылки, находят мгновенные фазы модулирующих колебаний третьей измерительной посылки на выходе измерительных каналов базисных станций: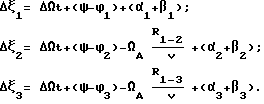 .
.
В контроллерах базисных станций также производится оцифровка полученных результатов для Δξ и их запоминание.
Наконец, для четвертой измерительной посылки в результате аналогичных действий получают ,
,
где , ψ′ - начальная фаза модулирующих колебаний.
, ψ′ - начальная фаза модулирующих колебаний.
Эти результаты в контроллерах базисных станций подвергаются оцифровке и затем запоминаются.
Далее в контроллерах производятся вычисления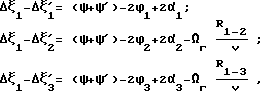 ,
,
результаты направляются на центральную станцию, где производятся дальнейшие вычисления: ,
,
и отсюда далее вычисляются указанные выше неопределенные величины в формулах для r2-r1 и r3-r1: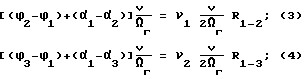 ,
,
Вставляя эти результаты в формулы для r2-r1 и r3-r2, получают окончательно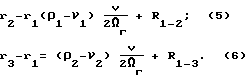 .
.
По полученным результатам вычисляются координаты подвижного объекта (источника сигнала тревоги). Все описанные операции по определению значений r2-r1 и r3-r1 и последующего определения по ним координат подвижного объекта выполняются цифровым методом. Преобразование аналогового измерительного сигнала с выхода измерительного канала 20 в цифровую форму в контроллере 22 для всех четырех измерительных посылок производится путем определения цифровыми средствами интервала времени между началом отсчета (момент появления дешифрованного управляющего сигнала) и моментам прохождения через ноль стационарной части синусоид 16, 16', 17 и 17'.
Входящие в выражениях для r2-r1 и r3-31 величины R1-2 и R1-3 определяются по значениям координат базисных станций, которые, как указывалось выше, должны находиться в постоянной памяти блока 44 центральной станции.
Предлагается радиоохранная система может быть реализована и в виде другого варианта.
Из формул для r2-r1 и r3-r1 видно, что фазовые задержки в цепях приемника α и β являются стационарными, не оказывающими влияния на точность определения координат подвижного объекта. Величины ν1 и ν2 также являются стационарными, но при нестабильности частоты Ωг могут существенно влиять на точность определения координат. Поэтому в общем случае приходится для исключения этой погрешности излучать стационарным сигнализатором две измерительные посылки - каждый раз после двух первых посылок, излучаемых абонентским сигнализатором. При этом, однако, увеличивается вдвое общая длительность измерительного сигнала и соответственно увеличивается вероятность наложения сигналов от разных источников сигналов тревоги. Сущность данного варианта реализации системы заключается в использовании высокостабильного генератора модулирующих колебаний частоты Ωг и излучать при этом две последние измерительные посылки стационарным сигнализатором с большим интервалом, при котором увеличение вероятности наложения сигналов будет незначительным. Так, например, если в качестве источника модулирующих колебаний гетеродинного сигнала частоты Ωг использовать рубидиевый генератор (обеспечивающий стабильность частоты колебаний в пределах 10-11), то ν1 и ν2 будут точно определены для моментов излучения стационарным сигнализатором, а в промежутках между ними (при нестабильности 10-11 промежутки могут быть ориентировочно равны 15 мин) величины ν1 и ν2 будут оставаться практически неизменными и их возможно использовать при расчете координат в этих промежутках.
Существует еще один вариант уменьшения общей длительности измерительной части сигнала тревоги, состоящий в использовании только двух измерительных посылок - одной от абонентского сигнализатора и другой от стационарного сигнализатора. Анализ, однако, показывает, что предлагаемая в настоящей заявке система с четырьмя измерительными посылками обеспечивает меньшую погрешность фазовых измерений и, следовательно, более высокую точность определения координат.
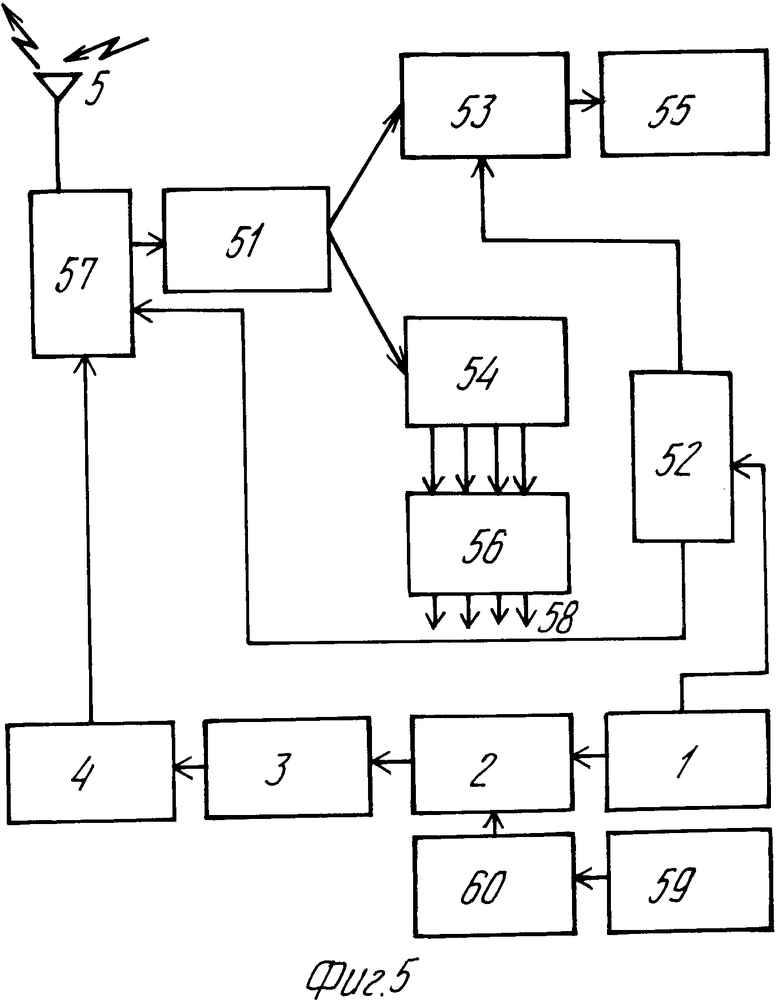
На фиг. 5 приведена структурная схема абонентского агрегата, состоящего из сигнализатора, выполненного по структурной схеме, аналогичной изображенной на фиг. 1, и сочлененного с ним радиоприемника, а также с кодирующим узлом 59; 60 - элемент согласования кодирующего узла с модулятором 2. Излучение и прием сигналов в агрегате производится на одну антенну 5 через антенный переключатель 57, последовательность действия которого обеспечивается соединенной с ним ключевой схемой 52.
Использование в системе абонентских агрегатов (вместо простых абонентских сигнализаторов) расширяет сферу использования системы, обеспечения возможность
определения того, находится ли абонент в зоне действия охранной системы;
излучения первой пары измерительных сигналов (для сообщения о своем местонахождении) по запросу центральной станции;
дистанционного останова угоняемой автомашины по радиосигналу от преследующей ее милицейской патрульной автомашины;
получения радиоуказаний голосом от проезжающей мимо патрульной автомашины.
Для определения того, находится ли абонентский сигнализатор в зоне действия охранной системы, необходимо обеспечить возможность (путем нажатия соответствующей кнопки) излучения сигнализатором сигнала, подобного сигналу тревоги, но с контрольным кодом, и одновременно обеспечить, чтобы на отрезок времени, пока должно происходить излучение второй пары измерительных посылок стационарным сигнализатором, на выходе детектора приемной части агрегата 51 был открыт специальный канал 53 для прохождения этой контрольной измерительной посылки. Тогда возникшим сигналом на выходе этого канала может быть включен индикатор 55, который будет указывать, что сигнализатор находится в зоне действия охранной системы.
Определение координат абонентского сигнализатора по запросу с центральной станции может быть двоякого вида - индивидуальное и групповое, причем в обоих случаях запросный сигнал должен поступать на той же частоте, что и сигнал тревоги.
При индивидуальном запросе запросный сигнал должен быть модулирован кодом, относящимся а запрашиваемому сигнализатору. При этом на выходе приемника должен быть подключен дешифратор этого кодового сигнала (один из группы дешифраторов 54), а его выход подключен через блок подготовки исполнительных сигналов 56 к схеме включения первой пары измерительных посылок. Исполнительным сигналом будет являться соответствующий сигнал из группы сигналов 58.
При групповом запросе запросный кодовый сигнал должен быть единым для запрашиваемой группы сигнализаторов с единой структурой дешифраторов на выходе приемной части агрегата, но каждый сигнализатор должен излучать первую пару измерительных посылок с определенной, относящейся к данному сигнализатору задержкой, которая формируется в блоке подготовки исполнительных сигналов 56, а исполнительным сигналом будет соответствующий сигнал из группы сигналов 58. На центральной станции по величине задержки производится определение к какому сигнализатору относится определяемая координата.
Если на выходе приемной части установить два дополнительных дешифратора - единых для всех абонентских агрегатов, то можно обеспечить прием милицейских кодированных сигналов для включения устройства дистанционного останова угоняемой автомашины с помощью соответствующего сигнала из группы 58 и соответственно для включения канала приема милицейских голосовых указаний с помощью другого соответствующего сигнала из группы 58 от близко проезжающей патрульной милицейской автомашины.
Помимо рассмотренных выше возможностей радиоохранной системы можно путем некоторого усложнения абонентского сигнализатора, незначительного изменения в программе работы базисной станции и внесения необходимой коррекции в работу центральной станции с использованием радиопередатчика пейджеровой системы обеспечить возможность передачи сообщения о тревоге и другой информации с центральной станции на пейджер владельца автомашины и возможность передачи пейджерового сообщения с подвижного сигнализатора на любой пейджер с известным номером.
Для обеспечения передачи сообщения о тревоге и другой информации от центральной станции на пейджер владельца автомашины необходимо компьютер с обработанными данными сигнала тревоги и с другой закодированной, подлежащей передаче информации соединить через согласующий элемент с модулятором радиопередатчика пейджеровой системы для излучения сигнала на пейджер нужного номера.
Для передачи пейджерового сообщения с подвижного сигнализатора на пейджер с известным номером необходимо абонентский сигнализатор дополнить кодирующим узлом, с помощью которого предварительно набирается подлежащее передаче, кодированное сообщение вместе с номером пейджера-адресата, причем кодирующий узел и сигнализатор должны быть соединены проводами или по радио.
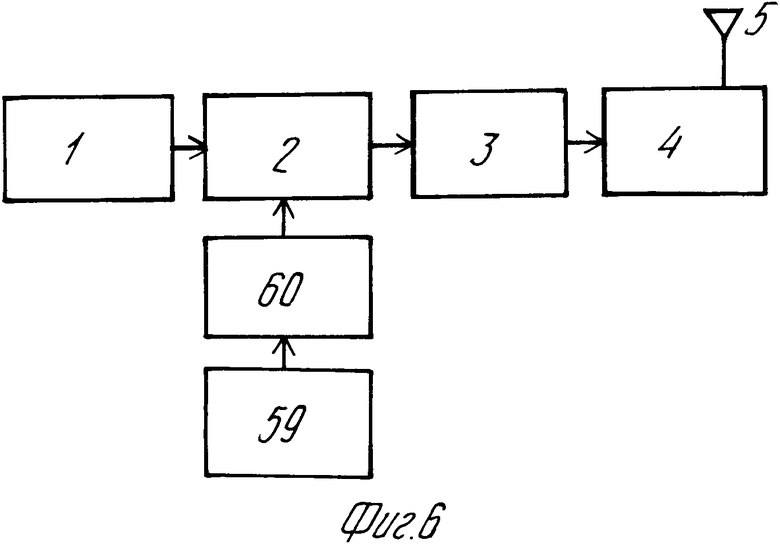
На фиг. 6 представлена структурная схема абонентского сигнализатора, сочлененного с кодирующим узлом, где 59 - кодирующий узел, 60 - элемент согласования кодирующего узла с модулятором сигнализатора.
Последовательность действия при передаче пейджерового сообщения может быть, например, такова. После набора пейджерового сообщения нажатием кнопки "пейджеровая передача" с кодирующего узла должен поступить сигнал на сигнализатор о подготовке к приему информации, которая заключается в том, что в кодовый адресный сигнал вводится код категории сигнала - "пейджеровая передача", и далее происходит обычное излучение кодовой части сигнала. По его окончании с сигнализатора на кодирующий узел поступает сигнал, после которого с него поступает вся закодированная в нем информация через согласующий элемент на модулятор передатчика для ее излучения в эфир. Вся излучаемая кодовая информация поступает на несколько базисных станций, где, как обычно, сначала осуществляется дешифрирование управляющего кодового сигнала, затем дешифрирование кода категории поступающего сигнала ("пейджеровая передача"). Возникшим импульсом на выходе дешифратора блокируется действие управляющего импульса и в результате на время прохождения пейджерового сообщения измерительный канал базисной станции будет оставаться запертым, а кодовый канал открытым. Вся кодовая информация с базисных станций, как обычно, далее поступает на центральную станцию, где в первый момент должна быть дешифрирована кодовая часть категории сигнала ("пейджеровая передача"). Полученным на выходе дешифратора импульсом устанавливается дальнейшая программа действий станции: кодированная информация направляется на компьютер, где сначала происходит совместная обработка информации с разных базисных станций для обеспечения высокой достоверности поступившей информации, затем после приведения информации в вид, удобный для излучения, передача обработанного сообщения через согласующий элемент на модулятор радиопередатчика пейджеровой системы для обеспечения радиопередачи сообщения на пейджер адресата.
Если в кодирующий узел ввести адресный код абонентского сигнализатора, то последовательность работы сигнализатора при пейджеровой передаче будет более простой, а именно после нажатия кнопки на кодирующем узле "пейджеровая передача" сразу вся кодовая информация (вместе с адресным кодом абонентского сигнализатора) через согласующий элемент пойдет на модулятор передатчика для ее излучения. Последовательность обработки информации на центральной станции при этом остается без изменения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2047839C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2036431C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2159190C1 |
| РАДИОПОИСКОВАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2244642C1 |
| СПОСОБ ПОИСКА И ПЕРЕХВАТА УГНАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228274C1 |
| СИСТЕМА ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2008 |
|
RU2345914C1 |
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ИНКАССАТОРСКИХ МАШИН | 2002 |
|
RU2222027C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПОИСКА И СПАСЕНИЯ ПРИ БЕДСТВИЯХ НА МОРЕ | 1997 |
|
RU2117959C1 |
| Способ измерения расстояний и устройство для его осуществления | 1958 |
|
SU121486A1 |
Изобретение относится к радиосистемам определения координат подвижных объектов с определением их координат при нападении на них или несанкционированном проникновении. Техническим результатом предложения является получение высокой точности определения местоположения множества подвижных объектов при одновременно упрощении реализации. Сущность изобретения: радиоохранная система содержит множество сигнальных передатчиков (абонентских сигнализаторов), содержащих фомирователь модулирующего сигнала, модулятор, ЧМ-генератор, усилитель мощности, антенну, приемную часть абонентского агрегата, ключевую схему, канал прохождения контрольного сигнала, группу дешифраторов, индикатор, блок подготовки исполнительных сигналов, антенный переключатель, сеть базисных станций и не менее одной центральной станции, где определяются категория сигнала тревоги и принадлежность абонентского сигнализатора. Координаты подвижного объекта определяются разностно-дальномерным способом не менее чем по по двум разностям расстояний между абонентстким сигнализатором и базисными станциями. Предусмотрена возможность контроля нахождения абонента в зоне действия охранной системы. Центральная станция может передавать пейджеровские сообщения о тревоге для владельца подвижного объекта, а абонентный сигнализатор может быть выполнен с возможностью передачи пейджеровского сообщения и снабжен кодирующим узлом набора пейджеровского сообщения. 2 с. и 4 з.п. ф-лы, 6 ил.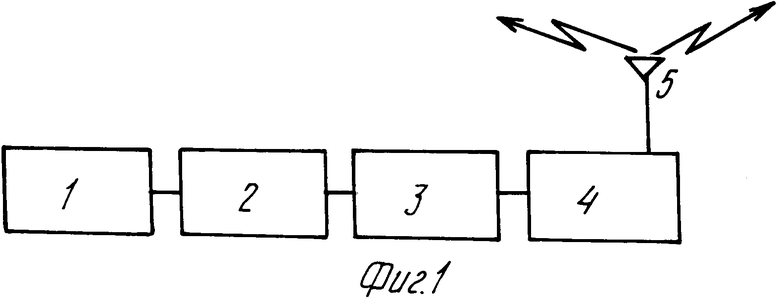
| Справочник геодезиста, книга 2, М.: Недра, 1985, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Камен Х., Электронные способы измерения в геодезии, М., Недра, 1982, с | |||
| Станок для изготовления из дерева круглых палочек | 1915 |
|
SU207A1 |
| GB, патент, 2218835, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| RU, патент, 2036431, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| EP, заявка, 0380075, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| РСТ, заявка, 93/19438, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| SU, авторское свидетельство, 796884, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| SU, авторское свидетельство, 926278, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
