Изобретение предназначено для преобразования мускульной энергии человека, преимущественно, во вращательную и относится к наземным транспортным средствам, машинам, механизмам и прочим устройствам, использующим мускульную тягу (велосипеды, веломобили, велорикши и т.д.).
Известны многочисленные варианты конструкций транспортных средств с различным выполнением мускульного привода, призванных повысить его коэффициент полезного действия, состоящие из рамы, рулевой колонки с рулем, ведомого и ведущего колес, жестких рычагов и тяги (например, RU №№2277759, 2247676, 2146632, 2122958 и др.).
Недостатком известных транспортных средств является сложность привода, большие потери на трение, быстрый износ элементов механического привода, низкий КПД.
Известно транспортное средство, приводимое в движение мускульной силой человека (патент США №1653889, 1927 г.), содержащее раму, установленные на ней руль с рулевой вилкой, переднее и ведущие задние колеса, пару приводных рычагов, каждый из которых передним своим концом шарнирно установлен на одной из сторон рамы и снабжен платформой для ноги, гибкую тягу, одним концом закрепленную на приводном рычаге, подвесив его, охватывая опорный шкив. Гибкая тяга намотана на одну из обгонных муфт, пара которых установлена на приводной оси, после чего, охватывая промежуточный ролик, намотана в противоположном направлении на вторую обгонную муфту и, охватывая второй опорный шкив, закреплена на втором приводном рычаге, также подвешивая его.
Недостатком охарактеризованного транспортного средства является размещение оси вращения промежуточного ролика перпендикулярно оси вращения обгонных муфт, при котором движение гибкой тяги вправо или влево исключается диаметром ролика, в то время как на обгонных муфтах гибкая тяга имеет боковые перемещения в связи с намоткой ряда витков или размоткой их. Все это создает существенные трения гибкой тяги о ее витки, при этом возможно перескакивание через ряд витков тяги, что создает неустойчивость работы устройства, потерю его мощности и быстрый износ, а свободное расположение гибкой тяги на обгонных муфтах также способствует ее спутыванию, дополнительному сопротивлению при размотке или намотке, что понижает КПД и делает его работу нестабильной.
Известно транспортное средство с приводом мускульной силой человека (патент RU №2160683, 2000 г.), более надежное и имеющее более высокий КПД.
Транспортное средство, приводимое в движение мускульной силой человека, содержит раму, установленные на ней руль с вилкой, переднее и ведущие задние колеса, пару приводных рычагов, каждый из которых передним своим концом шарнирно установлен на одной из сторон рамы и снабжен платформой для ноги, гибкую тягу, которая прикреплена концами к приводным рычагам, при этом, охватывая опорные шкивы, установленные на раме, она намотана на обгонные муфты, пара которых установлена на приводной оси. Обгонные муфты связаны посредством гибкой тяги, охватывающей промежуточный ролик, смонтированный на раме. Ось вращения промежуточного ролика установлена параллельно оси вращения обгонных муфт. На промежуточном ролике выполнена намотка гибкой тяги, при этом обгонные муфты расположены во втулке, имеющей вырезы под выход гибких тяг, а зазор между намотанной на обгонную муфту гибкой тягой и втулкой меньше толщины гибкой тяги.
Намотка гибкой тяги на промежуточный ролик с установкой его параллельно оси вращения обгонных муфт позволила сделать наматывание гибких тяг под прямым углом с движением витков синхронно на обгонных муфтах и промежуточном ролике, тем самым исключить снижение КПД устройства за счет перекоса гибкой тяги, а также исключить ее быстрый износ. Установка обгонных муфт во втулке, имеющей вырезы под выход гибкой тяги, причем с зазором между намотанной гибкой тягой на обгонные муфты и втулкой, меньшим толщины гибкой тяги, позволила исключить перескакивание гибкой тяги через виток, тем самым исключить возможность заклинивания устройства или порыва гибкой тяги.
Известен велосипед с рычажным ножным приводом (патент RU №2258625, 2004 г.), снабженным двумя обгонными муфтами, тремя гибкими передачами, связывающими двуплечие рычаги с приводом и ведомой звездочкой и между собой, что обеспечивает ускоренную передачу мускульной силы с педали на педаль, чем обеспечивается перемещение по пересеченной местности. В описании нет указания на конструктивное выполнение гибких передач, что позволяет сделать вывод об их классическом исполнении - цепная, тросовая и т.д., показавших за долгие годы известности свою недолговечность, при эксплуатации на высоких скоростях и грунтовых дорогах, невозможность достижения высокого КПД, сложность управления и обслуживания.
Известно транспортное средство с приводом мускульной силой человека (представленное патентом RU №21002240, 1997 г.), взятое в качестве ближайшего аналога.
Известное транспортное средство содержит раму, руль с рулевой колонкой, переднее и заднее ведущее колеса и мускульно-силовой привод качающихся шатунов с педалями.
Мускульный привод транспортного средства включает цепную передачу на заднее колесо с ведущей обводной звездочкой, закрепленной на валу каретки, правый и левый шатуны с педалями, установленные на общей оси, механизм изменения передаточного отношения, связанный правой и левой цепями с кареткой и шатунами через механизм свободного хода, дополнительные рычаги, несущие приводную шестерню. Привод снабжен второй приводной шестерней, и каждая из них выполнена в виде серповидного зубчатого сегмента, криволинейной поверхностью повернутого к педали и смонтированного на дополнительных рычагах, жестко соединенных с соответствующим шатуном. На нижнем конце каждого сегмента закреплен опорный конец соответственно правой и левой цепи, прижатой к зубчатой поверхности пластинчатых зубчатых секторов, в которых плавающе установлена ось направляющих звездочек механизма свободного хода. На валу каретки установлены поворотно два храповых колеса, а на нижнем конце коромысла консольно подвешена поворотная обводная звездочка механизма возврата шатунов, имеющего гибкий тяговый элемент, соединенный устройствами передачи усилия с тяговыми концами правой и левой цепей. Переключатель механизма изменения передаточного отношения установлен на верхнем конце коромысла и выполнен в виде подпружиненного силового штока с прижимной скобой и шаровой рукояткой. Привод имеет ограничитель поворота шатунов, смонтированный на раме под коромыслом.
В таком транспортном средстве возможно осуществление передач при наличии всего одной звездочки на заднем колесе; полного использования увеличивающегося тягового усилия при разгибе ноги велосипедиста, уменьшение расстояния между педалями до эргономически оптимального. Опытные испытания транспортного средства с таким приводом показали, что он более эффективен в отличие от известных, развиваемое велосипедистом мускульное усилие полностью передается, т.е. превращается в полезную работу, на вал каретки независимо от положения педали, обеспечивается максимальный крутящий момент.
Однако диапазон скоростей известного транспортного средства ограничен, переключение передач неудобное, при подъемах в гору и движении по пересеченной местности снижается КПД. Кроме того, компоновка узлов на раме и ее конструкция достаточно сложны технологически.
Задачей изобретения было устранение вышеуказанных недостатков, а именно создание технологичного транспортного средства, обеспечивающего расширенный диапазон скоростей, повышение КПД за счет рационального использования мускульных усилий человека при езде по дорогам с переменной нагрузкой (чередующиеся подъемы, спуски, неровное дорожное полотно и т.д.); возможность подъема в гору с одновременным переключением передач без остановки транспортного средства.
Указанные задачи решаются транспортным средством с приводом мускульной силой человека, содержащим раму, руль с рулевой колонкой, переднее и заднее ведущее колеса и мускульно-силовой привод качающихся шатунов с педалями, включающий механизм изменения передаточного отношения с органами управления, парой приводных пластинчатых секторов, парой приводных спиралевидных сегментов, механизм свободного хода и гибкие тяги, в котором, согласно изобретению, шатуны выполнены упруго подвешенными посредством кинематически объединенных в одну целую систему гибких тяг, к одной ветви которой поджаты приводные секторы, жестко установленные на оси шатунов и связанные второй ветвью гибкой тяги с приводными спиралевидными сегментами, свободно поворотными и установленными в раме на общей оси посредством скользяще посаженных на нее катушек, а третьей ветвью - с органами управления, размещенными на руле, и с механизмом подъема шатунов, введенным в привод, при этом приводные спиралевидные сегменты поджаты к соответствующей ветви гибкой тяги и связаны с механизмом свободного хода, размещенным на оси заднего ведущего колеса, ветвью гибкой тяги, в которой установлен механизм натяжения тяг.
Транспортное средство характеризуется тем, что в качестве гибких тяг установлены кевларовые шнуры.
Транспортное средство характеризуется тем, что механизм подъема шатунов смонтирован в раме и выполнен в виде установочного башмака с натяжными роликами и укрепленного на нем опорного блока подвески гибких тяг.
Транспортное средство характеризуется тем, что рама выполнена в виде пустотелого несущего кузова.
Транспортное средство характеризуется тем, что механизм свободного хода выполнен в виде двойной обгонной муфты, включающей установленные на оси ведущего заднего колеса пару обгонных муфт прямого хода и пару обгонных муфт заднего хода.
Такое выполнение конструкции транспортного средства позволяет:
- повысить его КПД за счет исключения непроизводительных энергозатрат и более рационального использования мускульных усилий человека;
- расширяет диапазон скоростей привода за счет предложенной компоновки составляющих его узлов;
- улучшает технологичность и снижает себестоимость производства и обслуживания деталей привода и транспортного средства в целом за счет исключения большого количества звездочек;
- обеспечивает надежность привода за счет установки кевларовых шнуров в качестве тяг.
Кроме того, оснащение транспортного средства описанным выше приводом обеспечивает удобство управления и бесступенчатое варьирование передаточным числом привода.
Наличие в приводе механизма подъема шатунов гарантирует скоростной подъем транспортного средства в гору (угол подъема 45-60°), а выполнение рамы в виде несущего кузова, защищающего от грязи и попадания инородных тел все элементы привода и управления, повышает надежность и долговечность конструкции в целом.
Предлагаемое транспортное средство поясняется чертежами, где:
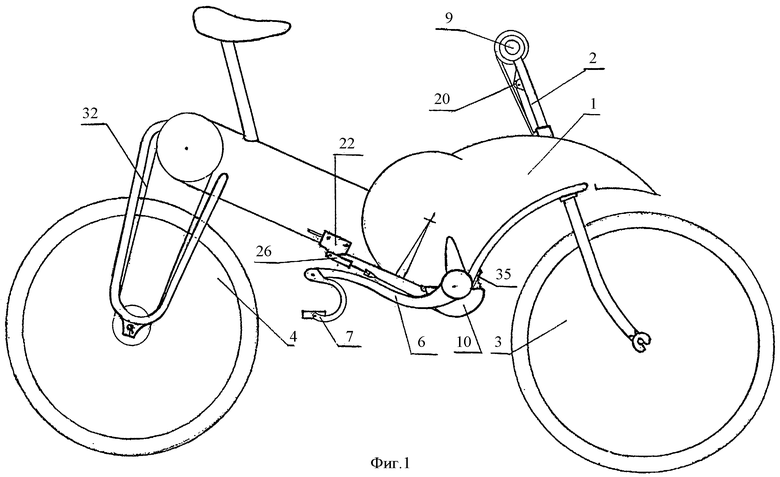
на фиг.1 представлен схематично его общий вид;
на фиг.2 - кинематическая схема привода, открытая справа;
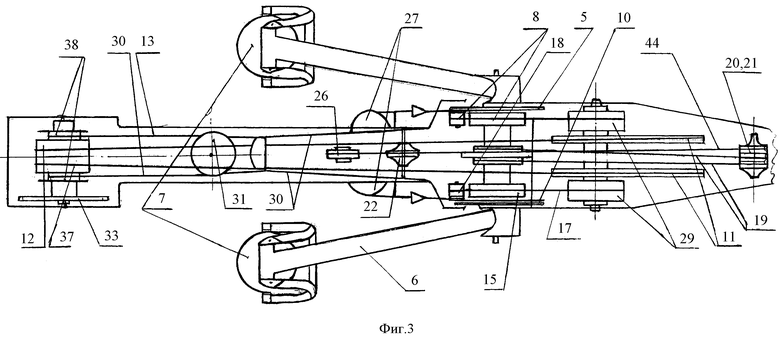
на фиг.3 - кинематическая схема привода, открытая сверху;
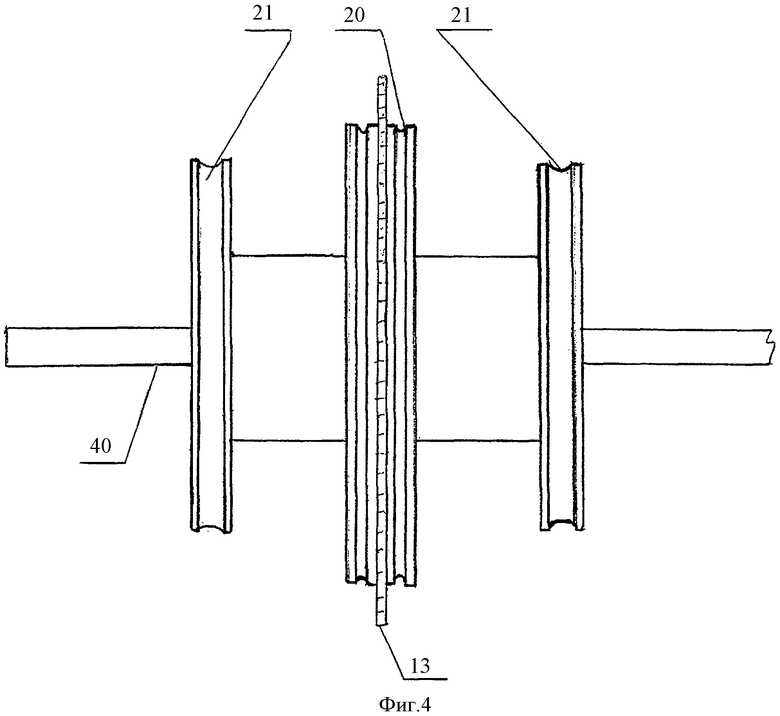
на фиг.4 - схематично показана ось шатунов с катушками;
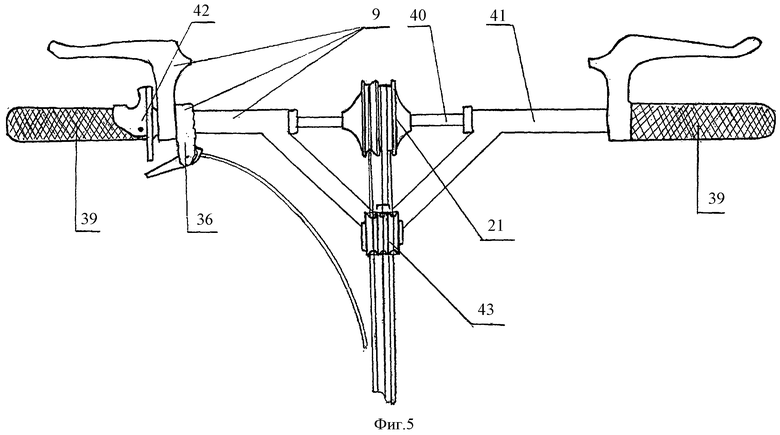
на фиг.5 - руль с органами управления;
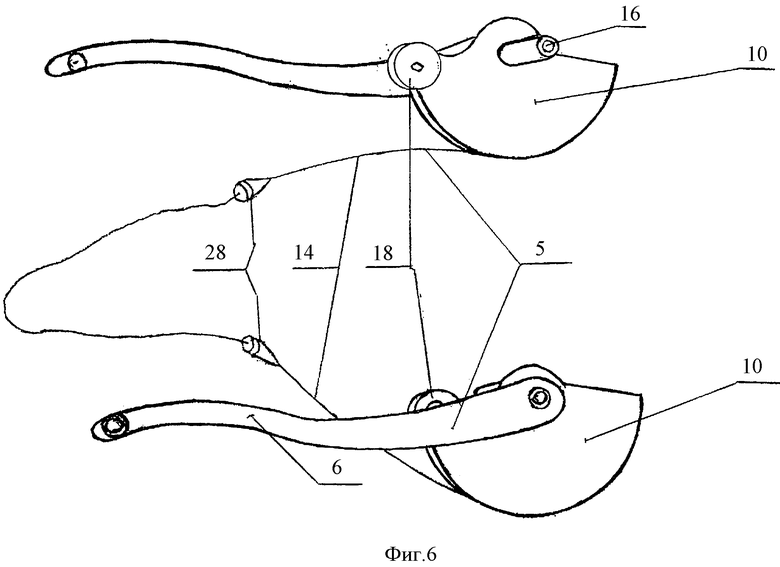
на фиг.6 - узел установки шатунов с секторами.
Транспортное средство с приводом мускульной силой человека содержит раму 1, выполненную пустотелой в виде несущего кузова, руль 2 с рулевой колонкой, переднее и заднее ведущее колеса 3, 4 соответственно и мускульно-силовой привод 5 качающихся шатунов 6 с педалями 7. Привод 5 включает механизм 8 изменения передаточного отношения с органами 9 управления, парой приводных пластинчатых секторов 10, парой приводных спиралевидных сегментов 11, механизм 12 свободного хода, гибкие тяги 13. Шатуны 6 выполнены упруго подвешенными посредством гибких тяг 13, кинематически объединенных в одну целую систему. К одной ветви 14 гибкой тяги поджаты приводные секторы 10, жестко установленные посредством катушек 15 муфты на оси 16 шатунов 6 и связанные второй ветвью 17 гибкой тяги, закрепленной на секторах 10 при помощи роликов 18, с приводными спиралевидными сегментами 11, а третьей ветвью 19 - с блоком 20 направляющих катушек 21 муфты, размещенных, например, на руле 2 и/или на рулевой колонке, и с механизмом 22 подъема шатунов 6, введенным в привод и выполненным в виде смонтированного в раме 1 установочного башмака 23 с натяжными роликами 24 и укрепленного на нем кронштейна 25 опорного блока 26 для подвески гибких тяг. Опорный блок 26 снабжен направляющими роликами 27 и натяжными серьгами 28.
Приводные спиралевидные сегменты 11 посредством скользяще посаженных на общей оси, закрепленной в раме 1, катушек 29 муфт поджаты к соответствующей ветви 30 гибкой тяги, выполнены свободно поворотными на оси в плоскости этой ветви гибкой тяги и связаны с механизмом 12 свободного хода, размещенным на оси заднего ведущего колеса 4, упомянутой последней ветвью 30 гибкой тяги, в которой плавающе установлен механизм 31 натяжения тяг. В качестве гибких тяг в приводе 5 установлены кевларовые шнуры.
Привод 5 может содержать цепную передачу 32 на заднее колесо с ведущей звездочкой 33, закрепленной на оси заднего ведущего колеса и несущей механизм 12 свободного хода; косозубую шестерню 34, установленную на оси 16 шатунов и приводных секторов, защелку-фиксатор 35, соединенную штифтером 36 закрепленным на руле 2.
Механизм 12 свободного хода выполнен в виде двойной обгонной муфты, включающей пару основных катушек 37 прямого хода и пару катушек 38 обратного хода.
Руль 2 оснащен ручками 39 управления, поворотными вокруг своей оси на трубках 40, проходящих в боковых рулевых патрубках 41. На концах трубок 40 в средней части, напротив рулевой колонки укреплены две направляющие катушки 21 блока 20, каждая из которых управляется своей ручкой 39. Например, на левой стороне патрубка 41 посредством фланца установлена защелка-фиксатор 42. На левом патрубке размещен штифтер 36 для управления защелкой-фиксатором 35. На рулевой колонке с внутренней стороны закреплены, например, три ролика 43 (или катушки обгонной муфты) блока 20. Таким образом, ручки 39, штифтер 36, защелка-фиксатор 35, защелка-фиксатор 42, блок 20 образуют органы управления транспортным средством.
На рабочих поверхностях секторов, сегментов, роликов и катушек, контактирующих с гибкими тягами - кевларовыми шнурами, выполнены канавки.
После сборки с основной осью 16 шатунов 6 гибкая тяга (кевларовый шнур) закладывается в опорный блок 23, натягивается механизмом 31 и является опорой для шатунов 6, которые секторами 10 опираются на ветвь 14. При движении транспортного средства, попеременно накатываясь на ролики 27 блока 26, серьги 28 ограничивают диапазон педалирования.
При подаче усилия на одну из педалей 7, натягивается ветвь 17 гибкой тяги, нижний ее конец, закрепленный на секторе 10 роликом 18, остается неподвижным, а верхний - поворачивает сегмент 11, который набегая на ветвь 30, поворачивает одну из катушек 37 прямого хода обгонной муфты. В это время соединенная с ней катушка 38 обратного хода наматывает ветвь 30 гибкой тяги через блок 31, возвращая в исходное положение соседние катушки 37, 38, а также сегмент 11.
Происходит попеременный накат правого и левого сегмента 11 на соответствующую ветвь гибкой тяги. Таким образом, на возрастающее усилие ноги, поворачиваясь, сегмент 11 отвечает возрастанием нагрузки. Мертвые зоны практически отсутствуют, ведущее колесо 4 во время движения постоянно находится под нагрузкой.
Для переключения передач, что возможно и во время движения транспортного средства, необходимо, нажимая штифтер 36, поднять защелку-фиксатор 35, правой ручкой 39 развернуть ось шатунов 6 и приводных секторов 10, которые установят нужное положение приводных сегментов 11. Положение сегментов и определяет требуемую передачу. Описанная конструкция привода допускает изменение передаточного отношения 1 не менее чем в три раза.
Для подъема шатунов 6 при движении транспортного средства в гору, во время преодоления пересеченной местности, необходимо выжать ручкой 39 защелку-фиксатор 42 из фланца, повернуть ручку 39, которая посредством ветви 44, взаимодействующей с башмаком 23 и опорным блоком 26, изменяя натяжку гибкой тяги, поднимет шатуны 6. Регулирование высоты подъема шатунов 6 можно выполнить в процессе движения транспортного средства. Механизм подъема шатунов обладает высокой надежностью и не снижает КПД привода.
Опытный образец транспортного средства изготовлен, проверен эксплуатацией.
Испытания подтвердили возможность производства надежного, легкого и удобного в пользовании транспортного средства с высоким КПД его мускульного привода.
Предложенное транспортное средство может найти применение в транспортном машиностроении, бытовой, медицинской и спортивной технике.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2100240C1 |
| САМОПЕД | 2007 |
|
RU2373099C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ПРИВОДОМ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 2000 |
|
RU2160681C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ПРИВОДОМ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 2000 |
|
RU2160683C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ВОДИТЕЛЯ | 1992 |
|
RU2106278C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ПРИВОДОМ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 2000 |
|
RU2160682C1 |
| САМОКАТ | 2012 |
|
RU2520634C1 |
| САМОКАТ | 2006 |
|
RU2329911C2 |
| РОЛЛЕР | 1991 |
|
RU2016807C1 |
| Транспортное средство, приводимое в действие мускульной силой человека, преимущественно велосипед | 2017 |
|
RU2651477C1 |
Изобретение относится к приводам велосипедов с ножными возвратно-поступательно движущимися рычагами и переменным передаточным отношением. Педальные рычаги (6) посредством шнура (17, 30) последовательно связаны с приводными спиралевидными сегментами (11) механизма (8) изменения передаточного отношения и затем с механизмом (37, 38) свободного хода ведущего колеса. Органы управления изменяют передаточное отношение посредством поворота спиралевидных сегментов (11) переменного радиуса через шнур (19), приводные секторы (10) и шнур (17). Органы управления изменяют высоту подъема рычагов (6) через шнур (44), механизм (23-27) подъема рычагов (6) и шнуры, проходящие по окружности приводных секторов (10). Механизм (31) обеспечивает натяжение шнуров, которые могут быть выполнены из кевлара. Техническое решение направлено на повышение эффективности привода. 4 з.п. ф-лы, 6 ил.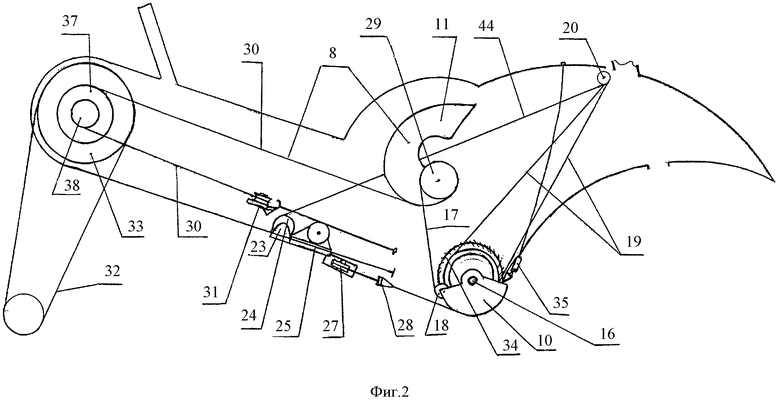
1. Транспортное средство с приводом мускульной силой человека, содержащее раму, руль с рулевой колонкой, переднее и заднее ведущее колеса и мускульно-силовой привод качающихся шатунов с педалями, включающий механизм изменения передаточного отношения с органами управления, парой приводных пластинчатых секторов, парой приводных спиралевидных сегментов, механизм свободного хода и гибкие тяги, отличающееся тем, что шатуны выполнены упруго подвешенными посредством кинематически объединенных в одну целую систему гибких тяг, к одной ветви которой поджаты приводные секторы, жестко установленные на оси шатунов и связанные второй ветвью гибкой тяги с приводными свободно-поворотными и установленными в раме на общей оси спиралевидными сегментами, а третьей ветвью - с органами управления, размещенными на руле, и с механизмом подъема шатунов, введенным в привод, при этом приводные спиралевидные сегменты поджаты к соответствующей ветви гибкой тяги и связаны с механизмом свободного хода, размещенным на оси заднего ведущего колеса, ветвью гибкой тяги, в которой установлен механизм натяжения тяг.
2. Транспортное средство по п.1, отличающееся тем, что в качестве гибких тяг установлены кевларовые шнуры.
3. Транспортное средство по п.1, отличающееся тем, что механизм подъема шатунов смонтирован в раме и выполнен в виде установочного башмака с натяжными роликами и укрепленного на нем опорного блока подвески гибких тяг.
4. Транспортное средство по п.1, отличающееся тем, что механизм свободного хода выполнен в виде двойной обгонной муфты, включающей установленные на оси ведущего заднего колеса пару обгонных муфт прямого хода и пару обгонных муфт заднего хода.
5. Транспортное средство по п.1, отличающееся тем, что рама выполнена в виде пустотелого несущего кузова.
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2100240C1 |
| WO 9818672 A1, 07.05.1998 | |||
| Устройство для приведения в действие транспортных средств мускульной силой человека | 1987 |
|
SU1512849A1 |
| Мускульный привод транспортного средства с возвратно-поступательным движением педалей | 1986 |
|
SU1507639A1 |
| Способ обработки на металлорежущих станках деталей с выемами и устройстве для осуществления способа | 1949 |
|
SU88448A1 |

