Предлагаемая конструкция транспортного средства относится к двухколейным двухколесным велосипедам, приводимым в движение мускульной силой человека, и предназначена для использования в различных модификациях в качестве дорожного, прогулочного, туристического и инвалидного транспорта.
Известны конструкции двухколейных двухколесных велосипедов, в которых кабина с мускульным приводом, главной осью, рулевым механизмом и двухступенчатой цепной передачей, соединяющей привод с колесами, подвешена между опорными колесами-движителями( SU, авторское свидетельство N 484118, кл. В 62 К 17/00, 1975).
Недостатками известной конструкции являются: сложность и неудобство посадки и выхода из качающейся кабины, некомпенсированный реактивный момент, действующий при ускорениях и преодолении уклонов и вызывающий маятниковое отклонение кабины, и изменение направления поворота при смене направления момента, приложенного к движителям (например, при смене ускорения торможением), сделана попытка компенсировать часть реактивного момента и уменьшить маятниковый эффект кабины за счет деформации рамы кабины, собранной на шарнирах. При этом не учтено, что деформация рамы приводит к уменьшению расстояния от центра массы кабины до оси качания кабины, увеличивая тем самым маятниковый эффект. Сама деформация под действием ускорений реактивных моментов происходит по тем же законам маятника, а сила натяжения цепи первичной ступени передачи приложена между двумя шарнирами на концах плеча трапеции и не участвует в деформации рамы. Остаются нерешенными и проблемы посадки в качающуюся кабину и сохранения управляемости на поворотах.
Задача изобретения является подавление маятникового раскачивания кабины, обеспечение удобного входа и выхода из кабины и сохранение управляемости на поворотах при всех режимах движения двухколейного двухколесного велосипеда.
Эта задача достигается тем, что в конструкции, содержащей два опорных колеса-движителя и подвешенную между ними кабину, состоящую из рамы, корпуса и фонаря и содержащую мускульный привод, первичную ступень цепной передачи, главную ось с обгонной муфтой и бортовыми механизмами передачи момента и рулевой устройство, рама кабины выполнена отдельной от несущей рамы, на которой закреплены колеса-движители и эллиптические направляющие балки, на которые кабина опирается несущими и направляющими роликами. Вторичная ступень цепной передачи состоит из двух бортовых цепей, соединяющих ведущие звездочки главной оси с ведомыми звездочками колес-движителей и обегающих паразитные звездочки на концах направляющих балок.
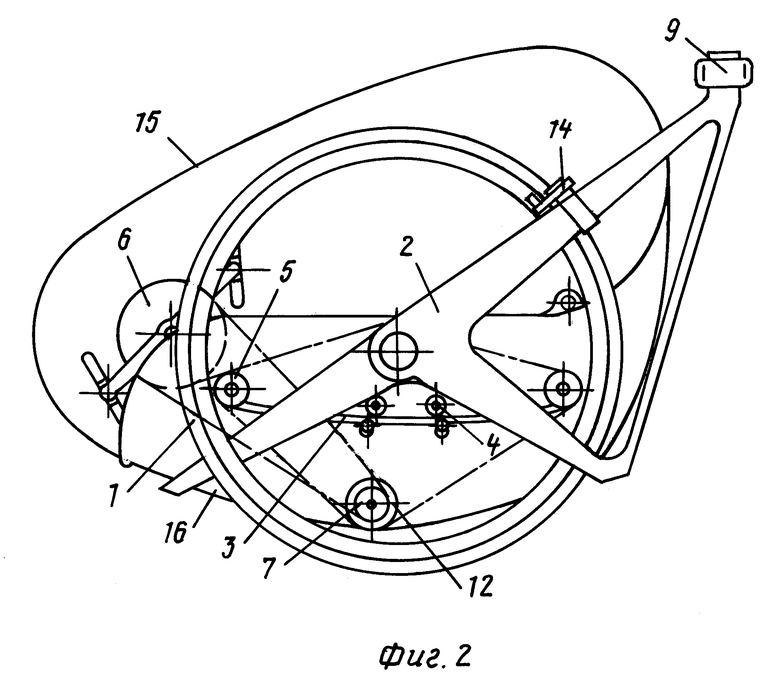
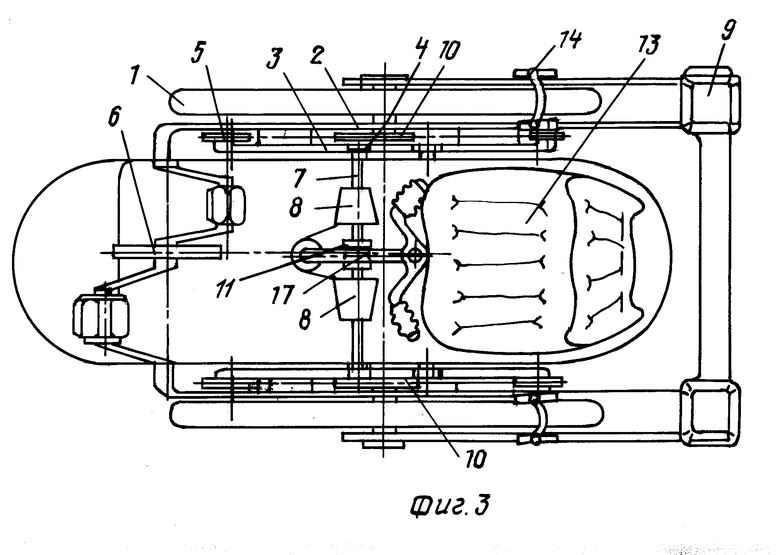
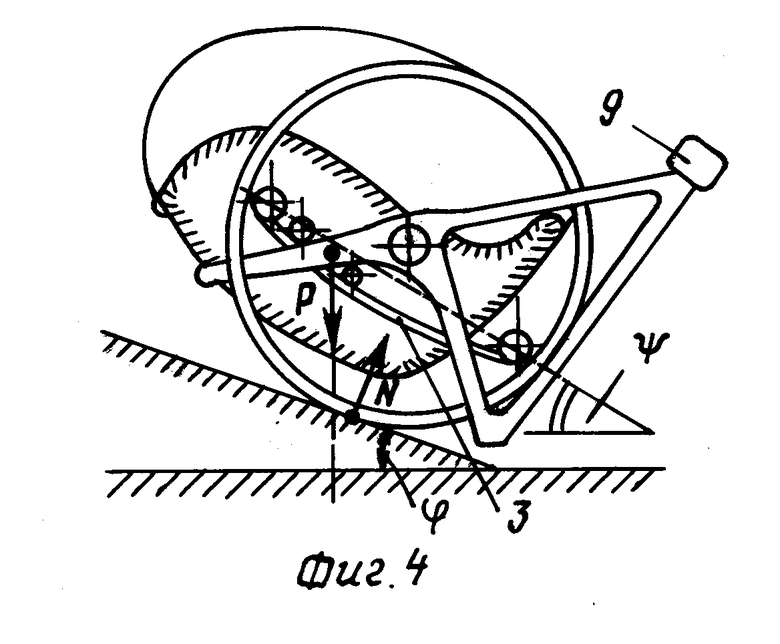
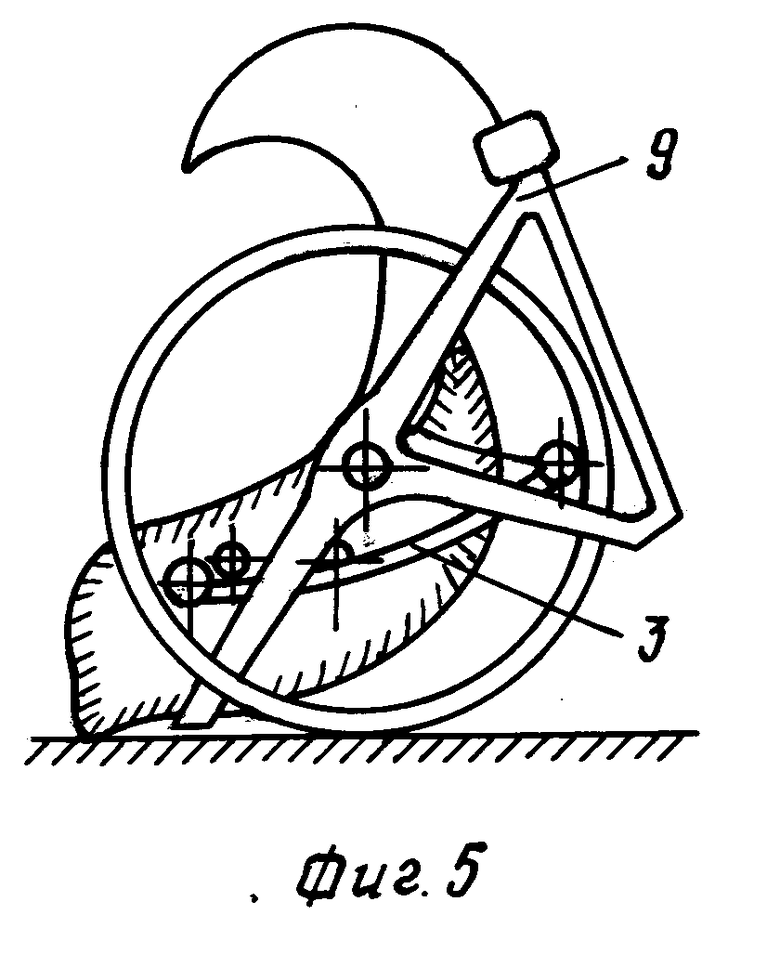
Пример конкретного выполнения устройства представлен на чертеже, на котором изображены три его проекции: рис.1 вид велосипеда сзади, рис.2 вид велосипеда сбоку, рис.3 вид велосипеда сверху, рис.4 схема распределения действующих моментов, рис.5 рисунок стояночного состояния: 1 опорные колеса-движители; 2 несущая рама; 3 направляющие балки; 4 несущие и направляющие ролики кабины; 5 паразитные звездочки вторичной ступени цепной передачи; 6 педальный привод; 7 главная ось; 8 плечи редукционного или фрикционного передаточного механизма; 9 светосигнальные приборы; 10 - ведомые звездочки колес; 11 ведомая звездочка главной оси с обгонной муфтой; 12 ведущие звездочки главной оси; 13 кресло; 14 колесные (стояночные) тормоза; 15 фонарь кабины; 16 корпус кабины; 17 рулевая колонка.
Работает устройство следующим образом.
Развиваемый в мускульном приводе момент передается цепью первичной ступени на ведомую звездочку 11 главной оси и, соответственно, через передаточные механизмы 8 ведущими звездочками 12 главной оси и бортовыми цепями вторичной ступени цепной передачи на ведомые звездочки 10 колес. При этом сила натяжения соответствующих участков цепей вторичной ступени передачи сообщает кабине вместе с несущей рамой маятниковое отклонение относительно оси колеси одновременно перемещает кабину по направляющим балкам. Это перемещение приводит к развитию опрокидывающего момента, препятствующего маятниковому отклонению кабины.
Кабина будет перемещаться по направляющим балкам до тех пор, пока возрастающая из-за маятникового отклонения и эллиптичности направляющих балок скатывающая сила не компенсирует тягу цепи и не прекратит сдвиг кабины. При этом развиваемый в приводе момент будет распределен на момент, компенсирующий момент сопротивления движению, и момент, ускоряющий конструкцию, а маятниковое отклонение будет подавлено.
Действие моментов сопротивления движению можно выразить действием одного обобщенного момента скатывающей силы для некоторого угла подъема (схема моментов на рис.4).
Для посадки в кабину и выхода из нее она выкатывается вперед при заторможенных колесах и упирается передней частью корпуса в дорогу. В таком положении удобно поднимать фонарь кабины и входить в нее и выходить, минуя колеса (рис.5).
Рулевой механизм состоит из качающейся рулевой колонки 17 с рулевой осью и двух бортовых передаточных механизмов 8. Рулевая колонка занимает два основных положения "I" и "II". В положении "I" начальные углы поворота рулевой оси регулируют передаваемый на соответствующее колесо момент, а при дальнейшем повороте приводят в действие тормозные устройства.
В положении "II" полностью отключены передающие механизмы и задействованы тормозные устройства.
Такое устройство рулевого механизма позволяет без потери управляемости переходить из режима ускорения (или подъема на уклон) в режим торможения.
Использование предложенного устройства позволит преодолеть наиболее существенные недостатки известных двухколейных двухколесных велосипедов и создать удобные транспортные средства, сохраняющие устойчивость при ускорениях, способные преодолевать участки с большой крутизной уклонов и допускающие установку эргономичных кабин. Эти качества снимают ограничения по возрасту и физическому состоянию пользователей и существенно расширяют сферу применения транспортных средств с мускульным приводом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНООСНОЕ САМОХОДНОЕ ИНВАЛИДНОЕ КРЕСЛО | 2009 |
|
RU2421202C2 |
| ОДНООСНЫЙ ВЕЗДЕХОД | 1995 |
|
RU2102272C1 |
| Робот-доставщик на одноосном шасси | 2021 |
|
RU2810208C2 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| ВАРИАТОР ХАМУКОВА | 1999 |
|
RU2146022C1 |
| Высокоподвижный исследовательский планетоход | 2022 |
|
RU2780069C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2131820C1 |
| Индивидуальное транспортное средство | 2016 |
|
RU2656802C2 |
| Агрегат для перемещения лежачих больных - больничный робот | 2018 |
|
RU2724824C2 |
| Высокомобильный транспортный робот для перемещения палетированных грузов | 2022 |
|
RU2798652C1 |
Использование в области наземных транспортных средствах, приводимых в движение мускульной силой человека, в частности, в двухколейных двухколесных велосипедах. Сущность изобретения в том, что обеспечивается подавление маятникового раскачивания кабины, обеспечение удобной посадки и выхода из кабины и сохранение управляемости при всех режимах движения, для этого в конструкции, содержащий два несущих колеса-движителя и подвешенную между ними кабину, рама кабины выполнена отдельной от несущей рамы, на которой закреплены колеса-движители и эллиптические направляющие балки, на которые кабина опирается несущими и направляющими роликами, а бортовые цепные передачи, соединяющие мускульный привод и ведомые звездочки колес-движителей, обегают паразитные звездочки на концах направляющих балок. 5 ил.
Двухколейный двухколесный велосипед с плавающей кабиной, содержащей два расположенных соосно параллельных колеса, между которыми размещена несущая рама, сиденье водителя, рулевое управление и привод колес, выполненный двухступенчатым, отличающийся тем, что он снабжен кабиной, при этом несущая рама выполнена с эллиптическими направляющими отдельно от кабины, в которой размещены сиденье водителя, рулевое управление, главный вал, первая ступень привода колес и на которой смонтированы опорные и направляющие ролики, посредством которых кабина оперта на эллиптические направляющие несущей рамы с возможностью продольного перемещения относительно последней, при этом первая ступень привода связана с главным валом с передающим механизмом, а вторая выполнена в виде замкнутых цепей, охватывающих ведущие звездочки главной оси, ведомые звездочки колес и паразитные звездочки, размещенные на концах эллиптических направляющих.
| Способ генерирования переменного тока | 1923 |
|
SU484A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
