10
собачку и тянет верхнюю ветвь цепи 18, которая при помощи звездочки 31 (фиг, 3) на приводном барабане приводит барабан во вращение. С приводного барабана вращение передается на ведущее колесо звездочкой 32 и цепью 21. При движении ног к себе, а рук от себя рычаг 12 идет назад, при этом выключается верхняя собачка и включается нижняя, что сохраняет направление барабана. При выключенном ручном приводе транспортное средство может приводиться в движение как совместной, так и попеременной работой ног. Изменение крутящего момента на ведущем колесе и изменение скорости двиИзобретение относится к транспортным средствам, приводимым в действие мускульной силой человека.
Цель изобретения - облегчение управления при повышении коэффициента полез- ного действия приводов.
На фиг. 1 дано транспортное средство, общий вид; на фиг. 2 - каретка захвата; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - редуктор совмещения наклона спинки и перемещения педалей, вид в плане; на фиг. 5 - то же, вид сбоку; на фиг. 6 - переключатель ручного привода, вид сбоку; на фиг. 7 - то же, вид сверху; на фиг. 8 - сечение Б-Б на фиг. 1;
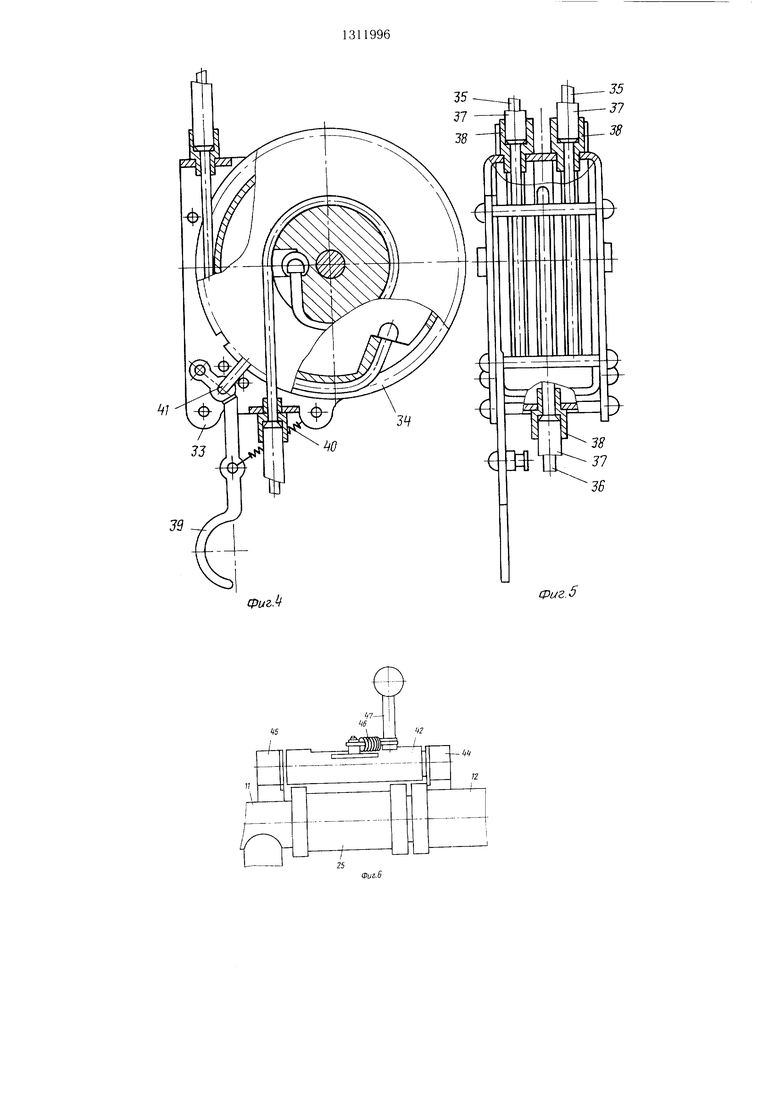
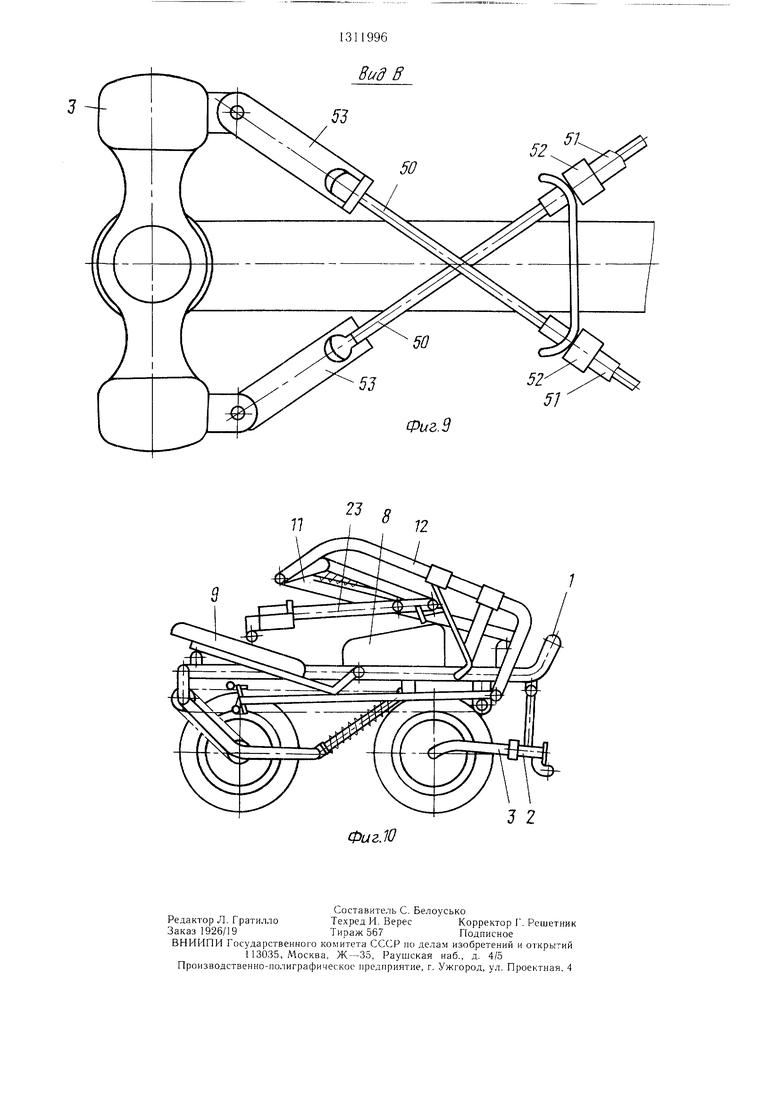
на фиг. 9 - вид В на фиг. 1; на ,г жения производятся перемещением педалей фиг. 10 - транспортное средство в ело-13 по рычагам 12. Педали через редукженном виде.тор тросами в оболочках связаны с телесТранспортное средство (фиг. 1) имеетконической стойкой 10 спинки кресла 9. Нанесущую балку 1, переднюю подвеску, зад-давливанием спиной на спинку и ноднянюю подвеску, кресло, ножные приводы, руч-тием ног при открытом стопоре 41 редукной привод, редуктор совмещения наклона 20 тора (фиг. 4) производится наклон спинки
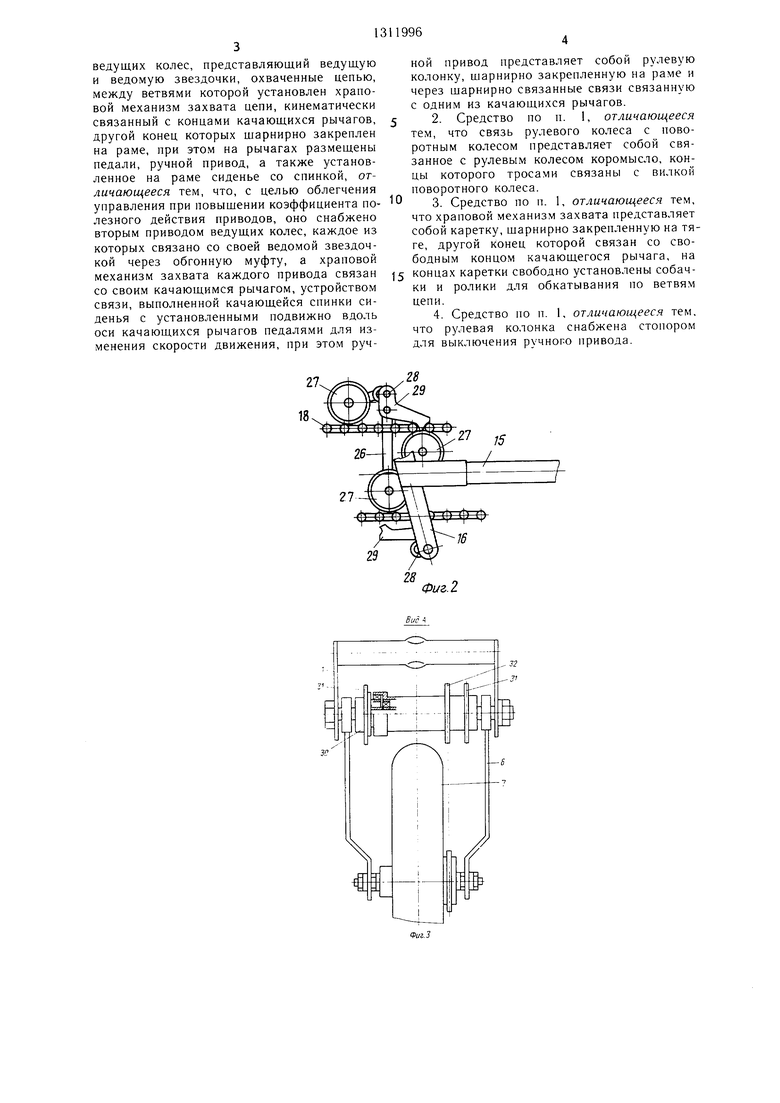
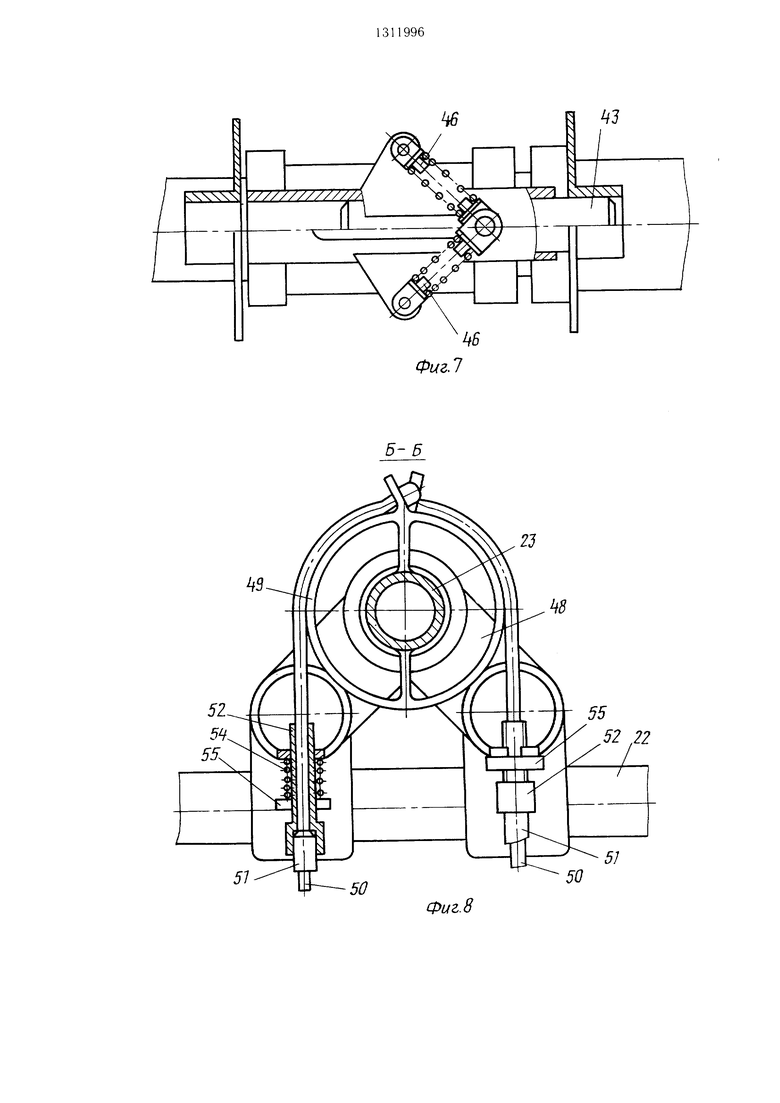
и перемещение педалей вверх. Опускание педалей и поднятие спинки происходит за счет веса ног при освобожденной спинке. Для уравновешивания спинки и педалей возможно применение пружины. Переключение ручного привода производится засовом 43 (фиг. 6 и 7), который соединяет рычаг ручного привода 25 или с рычагом 12 правого ножного привода для работы, или со стойкой 11 привода для стопорения. -,„ Управление рулевым колесом осуществляется поворотом руля 22 вместе с корпусом 48 (фиг. 8 и 9), при этом натягивается один из тросов 50 и опускается другой трос, концы которых закреплены в кольце 49, установленном на рулевой колон- вод (фиг. 1) имеет руль 22, рулевую 35 поворачивается передняя вилка 3. колонку 23, тягу 24, рычаг 25. Карет-Д- Я выбора люфта тросов имеется пружина 54 необходимой жесткости, усилие которой регулируется гайками 55. Складывание транспортного средства осуществляется путем опускания спинки кресла при отсоспинки и перемещения педалей, переключатель переднего привода, рулевое управление, стойку привода. Передняя подвеска (фиг. 1) имеет корпус 2, вилку 3, пружинный амортизатор 4, рулевое колесо 5. Задняя подвеска (фиг. 1) имеет вилку 6, пружинный амортизатор 4, ведущее колесо 7. Кресло (фиг. 1) имеет сиденье 8, спинку 9, телескопическую стойку 10. Стойка привода обозначена позицией 11. Ножные приводы (фиг. 1) имеют два рычага 12, две педали 13 с упорами 14, две тяги 15, два наконечника тяги 16, две каретки 17 захвата, две втулочно-роликовые цепи 18, две натяжные звездочки 19, приводной барабан 20, втулочно-роликовую цепь 21. Ручной прика захвата (фиг. 2) имеет рамку 26, ролики 27, пальцы 28, собачки 29. Приводной барабан (фиг. 3) имеет обгонную муфту 30, звездочки 31 и 32. Редуктор
совмещения наклона спинки и перемеще- 0 единенной стойке 10 (фиг. 1 ) назад ния педалей (фиг. 4 и 5) имеет корпус 33, шкив 34, тросы 35 перемещения педалей, трос 36 наклона спинки, оболочки 37 тросов, штуцера 38, рычажок 39, пружину 40, стопор 41. Переключатель ручного привода дс (фиг. 6 и 7) имеет корпус 42, засов 43, ушко ножного привода 44, ушко стойки привода 45, пружины 46, рукоять 47. Рулевое управление (фиг. 8 и 9) имеет корпус руля 48, кольцо 49, тросы 50, оболочки тросов 51, штуцера 52, тяги 53, пружину 54, 50 руле, гайку 55.
Движение транспортного средства осуществляется следующим образом.
При движении ног от себя, а рук к себе рычаг 12 идет вперед и через тягу 15,
и вниз, отсоединения стойки 11 привода одной точкой от несущей балки 1, отсоединения амортизатора 4 от корпуса 2 передней подвески, укладки стойки привода с ручным приводом, рычагами ножных приводов и амотизатором на сиденье, подворачивания передней подвески под транспортное средство.
Управление тормозами обоих колес производится рычажками, закрепленными на
Формула изобретения
1. Транспортное средство с мускульным приводом, содержащее раму, установленное
на которой закреплен наконечник 16 с паль- 55 в передней части рамы поворотное колесо, цами 28 (фиг. 2), имеюплими возможностьуправляемое рулевым приводом от рулевого
перемещаться в рамке каретки, включаетколеса, с рулевой колонной, размещенные в
верхнюю собачку 29, выключает нижнююзадней части рамы ведущие колеса, привод
собачку и тянет верхнюю ветвь цепи 18, которая при помощи звездочки 31 (фиг, 3) на приводном барабане приводит барабан во вращение. С приводного барабана вращение передается на ведущее колесо звездочкой 32 и цепью 21. При движении ног к себе, а рук от себя рычаг 12 идет назад, при этом выключается верхняя собачка и включается нижняя, что сохраняет направление барабана. При выключенном ручном приводе транспортное средство может приводиться в движение как совместной, так и попеременной работой ног. Изменение крутящего момента на ведущем колесе и изменение скорости дви
жения производятся перемещением педалей 13 по рычагам 12. Педали через редукединенной стойке 10 (фиг. 1 ) назад руле,
и вниз, отсоединения стойки 11 привода одной точкой от несущей балки 1, отсоединения амортизатора 4 от корпуса 2 передней подвески, укладки стойки привода с ручным приводом, рычагами ножных приводов и амотизатором на сиденье, подворачивания передней подвески под транспортное средство.
Управление тормозами обоих колес производится рычажками, закрепленными на
стойке 10 (фиг. 1 н
Формула изобретения
ведущих колес, представляющий ведущую и ведомую звездочки, охваченные цепью, между ветвями которой установлен храповой механизм захвата цепи, кинематически связанный с концами качающихся рычагов, 5 другой конец которых щарнирно закреплен на раме, при этом на рычагах размещены педали, ручной привод, а также установленное на раме сиденье со спинкой, отличающееся тем, что, с целью облегчения управления при повыщении коэффициента по- лезного действия приводов, оно снабжено вторым приводом ведущих колес, каждое из которых связано со своей ведомой звездоч
ной привод представляет собой рулевую колонку, шарнирно закрепленную на раме и через щарнирно связанные связи связанную с одним из качающихся рычагов.
2.Средство по п. 1, отличающееся тем, что связь рулевого колеса с поворотным колесом представляет собой связанное с рулевым колесом коромысло, концы которого тросами связаны с вилкой поворотного колеса.
3.Средство по п. 1, отличающееся тем, что храповой механизм захвата представляет собой каретку, щарнирно закрепленную на тя ге, другой Конец которой связан со свободным концом качающегося рычага, на
кой через обгонную муфту, а храповой
механизм захвата каждого привода связан концах каретки свободно установлены собачсо своим качающимся рычагом, устройствомки и ролики для обкатывания по ветвям
связи, выполненной качающейся спинки си-цепи.
денья с установленными подвижно вдоль4. Средство по п. 1, отличающееся тем,
оси качающихся рычагов педалями для из-что рулевая колонка снабжена стопором
менения скорости движения, при этом руч-для выключения ручного привода.
ной привод представляет собой рулевую колонку, шарнирно закрепленную на раме и через щарнирно связанные связи связанную с одним из качающихся рычагов.
2.Средство по п. 1, отличающееся тем, что связь рулевого колеса с поворотным колесом представляет собой связанное с рулевым колесом коромысло, концы которого тросами связаны с вилкой поворотного колеса.
3.Средство по п. 1, отличающееся тем, что храповой механизм захвата представляет собой каретку, щарнирно закрепленную на тяге, другой Конец которой связан со свободным концом качающегося рычага, на
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДНОЙ ВЕЛОМОБИЛЬ | 2006 |
|
RU2299827C1 |
| ПОЛНОПРИВОДНЫЙ ВЕЛОСИПЕД | 2008 |
|
RU2379211C1 |
| ТАНДЕМ А.Г. ДВОРЯНИДОВА | 2003 |
|
RU2247051C1 |
| ВЕЛОКОЛЯСКА | 1999 |
|
RU2161577C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1998 |
|
RU2131820C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038252C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| ВЕЛОСИПЕД С ЛИНЕЙНЫМ ПРИВОДОМ | 2008 |
|
RU2400391C2 |
| Веломобиль | 1989 |
|
SU1720921A1 |
| ГРУЗОПАССАЖИРСКАЯ ВЕЛОМАШИНА | 2021 |
|
RU2758626C1 |
Изобретение относится к транспортным средствам с мускульным нриводо.м. Цель изобретения - облегчение управления при повышении коэффициента полезного действия приводов. Транспортное средство состоит из несущей балки 1, стойки привода 1 1, приводов рулевого 5 и ведущего 7 колес, мягких подвесок обоих колес, кресла, тормозов на оба колеса и рулевого управления. На транспортном средстве применены раздельные идентичные для правой и левой ног приводы, позволяющие работать ногами как вместе, так и попеременно, и использовать их силу при движении как от себя, так и к себе. Ножные приводы имеют качающиеся рычаги 12 с перемещающимися по ним педалями 13, что позволяет менять скорость тран спортного средства в определенных пределах. Перемещение педалей связано с наклоном спинки 9 кресла тросами через специальный редуктор, который обеспечивает сохранение удобного cooTHonie- ния угла наклона спинки и высоты подъема педалей. Имеется ручной привод с качающейся рулевой колонкой 23, njapHHpHo соединенной через жесткую тягу, дополнительный качающийся рычаг и перек,1юча- тель ручного привода из рабочего состояния в застопоренное с правым ножным приводом. Переключатель имеет засов, который фиксируется в крайних положениях двумя пружинами со встречными усилиями. 3 з. п. ф-лы, 10 ил. I (Л 10 25 со со с
ФигМ
Фиг.5
45
«
Фиг.1
3
51
Tf
2J
57
50
50
Фиг.8
51
Фиг. 9
Составитель С. Белоусько
Редактор Л. ГратиллоТехред И. ВересКорректор Г. Решетник
Заказ 1926/19Тираж 567Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж - 35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ФигЛО
| Мускульный привод транспортного средства | 1982 |
|
SU1129116A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
