Изобретение относится к технике, связанной с созданием предметов для отдыха, а более конкретно к конструкции гамаков.
Изобретение может быть использовано главным образом в виде гамаков "стационарного" типа, т.е. таких, которые крепятся к вертикальным стойкам, выполненным, как правило, в виде врытых в землю столбов с вделанными крюками для подвешивания гамака.
Известно такое техническое решение, как гамак хлопчатобумажный, предназначенный для создания удобных условий для отдыха, которое в простейшем своем виде представляет собой некоторую опорную поверхность для размещения человека, выполненную в виде скрепленных между собой строп, которая с помощью строп, тяг или каких-либо других элементов конструкции аналогичного назначения подвешивается к вертикальным стойкам таким образом, что при раскачивании указанная поверхность вместе с находящимся на ней человеком имеет возможность совершать колебательные движения (ТУ РСФСР 17-3189-69).
Недостаток известного технического решения состоит в том, что для поддержания качаний в течение достаточно длительного времени отдыхающему в гамаке человеку все время приходится прилагать определенные мускульные усилия, в связи с чем необходимое для отдыха и ощущения комфорта пребывание в состоянии полной расслабленности во время качаний оказывается недоступным, так как при отсутствии поддерживающих качания раскачивающих усилий со стороны человека качания быстро затухают, и гамак останавливается.
Целью настоящего изобретения является улучшение эксплуатационных свойств гамака за счет преодоления указанного выше недостатка, присущего известному техническому решению, т.е. создание возможности пребывания человека в гамаке в состоянии полного расслабления при одновременном наличии незатухающих качаний гамака.
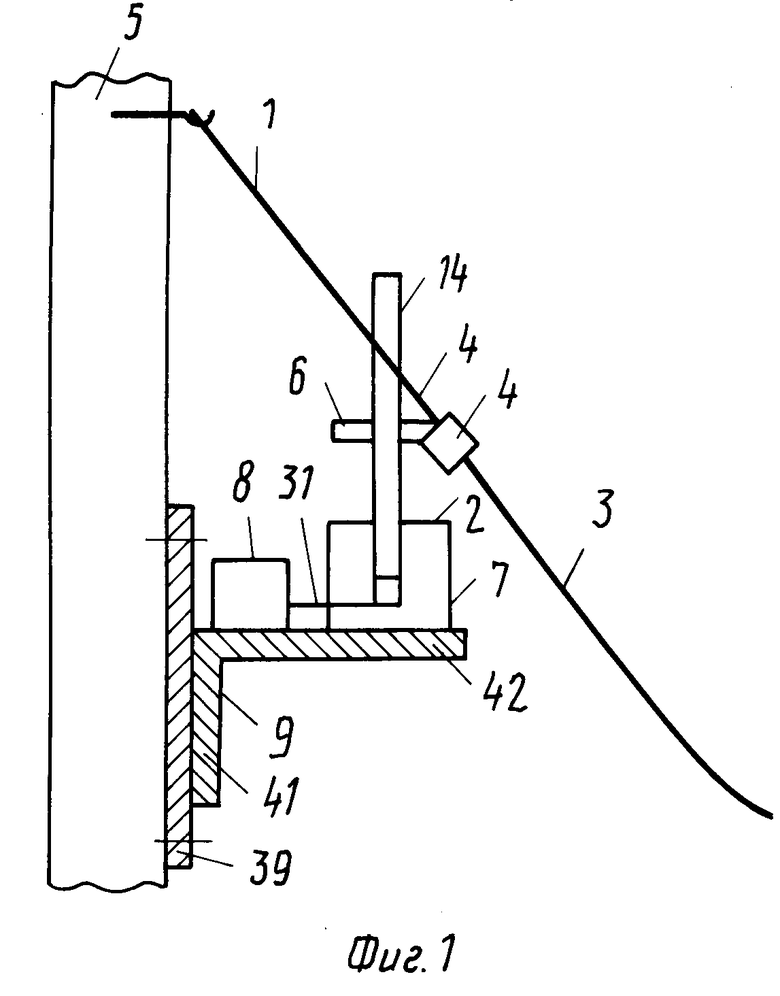
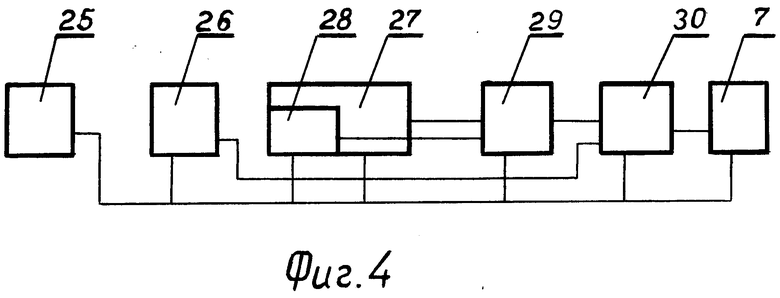
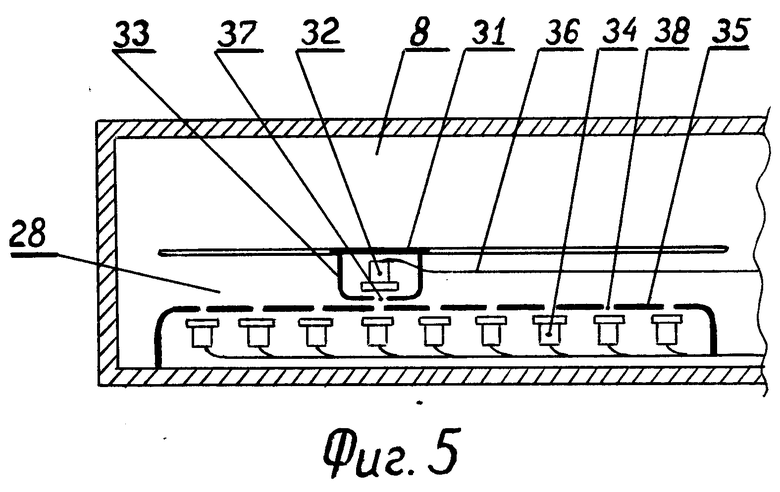
На фиг. 1 показано взаимное расположение функциональных узлов устройства при установке их на одной из вертикальных стоек, к которым подвешивается гамак; на фиг. 2 взаимное расположение составных частей устройства при виде на вертикальную стойку сбоку; на фиг. 3 разрез магнитного механизма возвратно-поступательного перемещения; на фиг. 4 структурная схема блока управления; на фиг. 5 вертикальный разрез узла измерителя амплитуды качания.
Гамак (фиг. 1) состоит из гамака 1 хлопчатобумажного и раскачивающего механизма 2. Гамак 1 хлопчатобумажный имеет опорную поверхность 3 для размещения человека, пару планок 4 с растяжками для закрепления опорной поверхности 3 на паре вертикальных стоек 5 в висячем положении и средство 6 для передачи движения опорной поверхности 3. Раскачивающий механизм 2 состоит из средства управления исполнительным органом, которое в предпочтительном варианте выполнено в виде магнитного механизма 7 возвратно-поступательного перемещения с блоком управления 8 и приводным электродвигателем 10, и исполнительного органа 11 (фиг. 2), выполненного в виде штока 12, соединенного со штангой 13, оканчивающей на одном ее конце в виде вилки 14 с двумя зубцами. Магнитный механизм 7 возвратно-поступательного перемещения (фиг. 3) имеет соединенный наглухо с приводным электродвигателем 10 ротор 15, выполненный в виде двух полых цилиндров 16 и 17, соединенных с валом 18 приводного электродвигателя 10 пластиной 19. Между полыми цилиндрами 16 и 17 ротора 15 расположен якорь 20, соединенный со штоком 12 исполнительного органа 11. В магнитном механизме 7 возвратно-поступательного перемещения имеются наружная 21 и внутренняя 22 катушки возбуждения. Полые цилиндры 16 и 17 ротора 15 имеют на своих сторонах, обращенных к якорю 20, зубцы 23, которые совместно с зубцами 24, расположенными на обеих сторонах якоря 20, образуют соответственно две винтовые магнитные пары "винт-гайка", причем, винтовая резьба одной (внешней) винтовой пары, образованной зубцами 24 якоря 20 и зубцами 23 внешнего полого цилиндра 16, имеет направление вращения противоположное по отношению к направлению вращения другой (внутренней) винтовой пары, образованной зубцами 24 якоря 20 и зубцами 23 внутреннего полого цилиндра 17 ротора 15, причем для обеих винтовых пар ведущим элементом пары являются зубцы 23 полых цилиндров 16 и 17 ротора 15, а ведомым элементом винтовой пары являются зубцы 24 якоря 20.
В предпочтительном варианте выполнения блок управления 8 (фиг. 4) состоит из источника 25 питания и соединенных с ним блока 26 временных задержек, блока 27 задания амплитуды качания с входным узлом 28 измерителя амплитуды, блока 29 сравнения и блока 30 выработки исполнительной команды. Выход блока 27 задания амплитуды качания подключен к входу блока 29 сравнения, выход которого подключен к входу блока 30 выработки выходной команды, выход которого связан с управляющими элементами магнитного механизма 7 возвратно-поступательного перемещения (в рассматриваемом случае такими элементами в магнитном механизме 7 являются катушки 21 и 22 возбуждения). Входной узел 28 измерителя амплитуды качания блока 27 задания амплитуды качания (фиг. 5) состоит из планки 31, на которой установлены один или несколько светодиодов 32, закрытых шторкой 33, и набора фотодиодов 34, закрытых шторкой 36. Планка 31 прикреплена к штоку 12 исполнительного органа 11. Напряжение питания к светодиоду 32 подводится с помощью гибкого токоподвода 36. Шторка 33, закрывающая светодиоды 32, имеет узкую щель 37. Шторка 35, закрывающая фотодиоды 34, имеет несколько узких щелей 38 в соответствии с количеством фотодиодов 34. Все щели 38 ориентированы в пространстве параллельно щели 37. Между шторками 33 и 35 имеется небольшой зазор, величина которого определяется только технологическими возможностями.
В предпочтительном варианте выполнения опора 9 для закрепления магнитного механизма 7 возвратно-поступательного перемещения вместе с приводным электродвигателем 10 и блоком управления 8 на одной из вертикальных стоек 5 (фиг. 1) выполнена в виде двух разъемных составных частей, одна из которых представляет собой пластину 39, наглухо прикрепляемую к одной из вертикальных стоек 5, а другая выполнена в виде съемной полки 40. На широкой стороне пластины 39 имеется паз, выполненный в форме ласточкиного хвоста. Полка 40 выполнена в виде соединенных между собой вертикальной 41 и горизонтальной 42 пластин, причем, вертикальная пластина 41 выполнена в форме ответной части ласточкиного хвоста, вставляемой в паз пластины 39.
В предпочтительном варианте выполнения средство 6 для передачи движения опорной поверхности 3 гамака выполнено в виде штыря, прикрепленного к одной из планок 4 с растяжками.
В предпочтительном варианте выполнения блок 8 управления выполнен в виде механизма дистанционного управления, в котором дополнительно имеются блоки дистанционной передачи и приема команд с пультом дистанционного управления.
Предлагаемое устройство работает следующим образом.
Перед началом качаний магнитный механизм 7 возвратно-поступательного перемещения вместе с приводным электродвигателем 10 и блоком управления 8 устанавливают на одной из вертикальных стоек 5. Для этого полку 40 с закрепленными на ней указанными составными частями вставляют пластиной 41 в паз пластины 39, наглухо установленной на одной из вертикальных стоек 5. Затем с помощью выведенных на наружную поверхность блока управления 8 органов управления (например, путем вращения ручки переменного резистора или нажатия кнопок, в зависимости от элементной базы и схемы построения, использованных в блоке управления 8) устанавливают (задают) требуемое значение общей продолжительности качания. После этого с помощью средств подключения раскачивающего устройства 2 к сети питающего напряжения на него подают напряжение питания, усаживаются в гамаке и приступают к его раскачиванию. Подача напряжения питания на раскачивающий механизм 2 приводит к срабатыванию средства выработки задержки в блоке 26 временных задержек блока управления 8, одно из которых устанавливает время общей продолжительности качания в соответствии с заданным значением, а другое вырабатывает кратковременную задержку, продолжительность которой определяется временем, необходимым для начального раскачивания гамака до нужного значения амплитуды и равного, например, 2-3 мин.
Срабатывание средства кратковременной задержки приводит к тому, что в течение всего времени начального раскачивания гамака за счет мускульных усилий человека напряжение питания на катушки возбуждения 21 и 22 не подается, вследствие чего зацепление между элементами винтовых пар отсутствует, так как оно может возникнуть только в результате магнитного взаимодействия между ними, которое в свою очередь может возникнуть только при наличии магнитного потока, создаваемого той или иной катушкой возбуждения 21 или 22. Таким образом, в течение всего периода начального раскачивания гамака 1 в результате того, что напряжение питания на катушки возбуждения 21 и 22 не подается, якорь 20 имеет возможность свободно перемещаться внутри магнитного механизма 7 возвратно-поступательного перемещения, не испытывая при этом какого-либо сопротивления со стороны винтовых пар. Соответственно этому связанная с якорем 20 через шток 12 вилка 14 также имеет возможность свободно перемещаться под действием сил, возникающих в результате воздействия штыря 6 на вилку 14.
В результате начального раскачивания гамака вместе со всем гамаком приходит в движение штырь 6, который смещается из своего первоначального нейтрального положения. Поскольку указанный штырь 6 находится в постоянном зацеплении с вилкой 14 исполнительного органа 11, то в результате перемещения в пространстве штыря 6 перемещение передается также вилке 14, от нее штоку 12, т.е. в конечном счете возвратно-поступательное перемещение сообщается прикрепленной к штоку 12 планке 31, с установленным на ней светодиодом 32 и шторкой 33. В результате этого освещаемая светодиодом 32 щель 37 также перемещается в пространстве, последовательно проходя мимо щелей 38 в шторке 35, которые закрывают расположенные под ними фотодиоды 34. Благодаря тому, что между шторками 33 и 35 имеется очень малый (определяемый только технологическими возможностями) зазор, то поступающий из щели 37 световой поток, создаваемый светодиодом 32, может попасть только на один из фотодиодов 34, щель которого 38 в данный момент оказывается совмещенной с проходящей над ней щелью 37.
Поскольку срабатывание фотодиодов 34, расположенных на более удаленном расстоянии от начального положения (соответствующего нейтральному положению гамака), приводит к выработке рассматриваемым средством более высокого уровня сигнала на выходе, то соответственно этому сигнал рассматриваемого средства оказывается пропорциональным величине достигнутого щелью 37 отклонения от нейтрального положения, что в конечном счете равносильно тому вырабатывается сигнал, пропорциональный амплитуде качания. Максимальное значение сигнала, достигнутое на выходе рассматриваемого средства (выходного узла 28 измерителя амплитуды) к концу периода начального раскачивания, запоминается и в дальнейшем используется в качестве заданного (установленного) значения амплитуды качаний, поступая на один из входов блока сравнения 29.
По окончании периода начального раскачивания гамака, т.е. по окончании времени задержки, выработанного средством выработки кратковременной задержки, происходит разблокирование цепей питания катушек возбуждения 21 и 22 и, кроме того, напряжение питания подается на приводной электродвигатель 10 механизма 7 возвратно-поступательного перемещения, в результате чего в дальнейшем при последующих качаниях осуществляется поддержание постоянства значения амплитуды качания в соответствии с заданным значением. Взаимодействие отдельных составных частей в процессе поддержания постоянного значения амплитуды качания осуществляется следующим образом. Обозначим через А положение гамака, соответствующее максимальному отклонению гамака. Если находящийся в положении А гамак отпустить, предоставив ему возможность совершать свободные колебания, то после завершения всего цикла, соответствующего одному полному колебанию, гамак вновь вернется в положение, близкое начальному положению А, которое однако не совпадает с ним полностью и которое обозначим через В. Вследствие наличия в системе определенных потерь положение В будет характеризоваться меньшей высотой подъема гамака, чем та, которая соответствует начальному положению А. Таким образом, при свободных колебаниях амплитуда колебаний естественным образом уменьшается, что и приводит в конечном счете к полному их прекращению остановке гамака.
Для того, чтобы с течением времени не происходило бы уменьшения амплитуды качаний гамака, необходимо, чтобы после завершения каждого колебания, т.е. возвращения гамака в результате свободного движения в положение В, затем совершалось бы под действием сил со стороны раскачивающего механизма принудительное перемещение гамака из положения В в более высокое положение А. Это достигается за счет того, что после достижения гамаком положения В подается напряжение питания на соответствующую катушку возбуждения 21 или 22, в результате чего происходит магнитное сцепление соответствующей винтовой пары и усилие от приводного элекродвигателя 10 передается на исполнительный орган 11, вследствие чего, преодолевая сопротивление, вызванное действием силы тяжести находящегося в гамаке человека, гамак перемещается из положения В в положение А. После достижения гамаком положения А напряжение питания перестает подаваться на соответствующую катушку возбуждения, в результате чего происходит расцепление действовавшей непосредственно до этого момента винтовой пары, и шток 12 исполнительного органа 11 получает возможность свободного перемещения относительно не прекращающего вращаться ротора 15 под действием сил, действующих на него со стороны штыря 6 через средство вилки 14.
Таким образом, для поддержания постоянства заданной амплитуды качаний, т. е. при наличии в системе качающегося гамака некоторого начального запаса механической энергии, созданного за счет затрат мускульных усилий в период начального раскачивания гамака, в дальнейшем необходимо только восполнение потерь энергии за счет работы, совершаемой приводным электродвигателем 10. При этом, поскольку пополнение энергии системы осуществляется в результате кратковременного сцепления приводного электродвигателя 10 через посредство якоря 15 со штоком 12 исполнительного органа 11, то с практической точки зрения целесообразно пополнение энергии производить не один раз в течение одного цикла колебаний, а два раза, так как в этом случае восполняемая энергия соответствует потерям, накопившимся не за весь цикл, а только за половину цикла, т.е. осуществляется меньшими порциями, вследствие чего условия работы приводного электродвигателя 10 облегчаются. Следовательно, при использовании рассматриваемого механизма 7 возвратно-поступательного перемещения напряжение питания на катушки возбуждения 21 и 22 целесообразно подавать не один, а два раза за цикл, изменив при этом направление движения исполнительного органа 11.
Поддержание постоянства амплитуды качаний гамака осуществляется в результате следующего взаимодействия составных частей. После того, как находящийся в гамаке человек, достигнув желаемого размаха качаний, в дальнейшем перестает его раскачивать, амплитуда качаний начинает постепенно уменьшаться вследствие наличия в системе потерь энергии. С уменьшением размаха качаний уменьшается также и уровень сигнала, вырабатываемого на выходе входного узла измерителя амплитуды 28, который поступает на один из входов блока сравнения 29. В то же время на второй вход блока сравнения 29 продолжает поступать запомненное схемой значение сигнала, соответствующее установленному значению амплитуды качаний гамака. В результате того, что поступающие на входы блока сравнения 29 сигналы имеют неодинаковое значение, на выходе данного блока сравнения 29 вырабатывается сигнал, пропорциональный разности значений заданного и фактически измеренного значений амплитуды. Этот сигнал с выхода блока сравнения 29 поступает на вход блока 30 выработки исполнительной команды.
Для рассматриваемого магнитного механизма 7 возвратно-поступательного перемещения исполнительная команда имеет значение длительности импульса, определяющего продолжительность времени, в течение которого напряжение питания подается на катушки возбуждения 21 и 22, поскольку длина хода штока 12 исполнительного органа 11 непосредственно определяется продолжительностью существования магнитного поля, создаваемого катушками возбуждения, так как наличие магнитного поля определяет продолжительность существования режима, при котором имеется магнитное зацепление между элементами винтовых пар и который в свою очередь в конечном счете определяет продолжительность принудительного перемещения исполнительного органа 11 в результате воздействия на него со стороны приводного электродвигателя 10, направленного на преодоление действия силы тяжести, передаваемой на шток 12 со стороны штыря 6, в результате чего осуществляется перемещение гамака на большую высоту, т.е. происходит восстановление амплитуды качания до прежнего заданного значения.
После восстановления амплитуды качаний разность между значениями сигналов, поступающих на входы блока сравнения 29, исчезает и соответственно этому с выхода указанного блока перестает поступать команда на вход блока 30 выработки исполнительной команды, следовательно, напряжение питания в течение всего того времени, пока это равенство значений указанных сигналов на входах блока сравнения 29 сохраняется, перестает подаваться на катушки возбуждения 21 и 22, вследствие чего гамак совершает несколько качаний в режиме свободных колебаний. Как было рассмотрено ранее, свободные качания приводят к тому, что амплитуда качаний уменьшается. Снижение амплитуды продолжается до такого уровня, при котором при имеющейся чувствительности входных цепей блока сравнения 29 поступающие на его вход сигналы наконец начинают восприниматься как имеющие неодинаковые значения. Начиная с этого момента на выходе блока сравнения 29 вновь начинает вырабатываться сигнал, пропорциональный значению разности сигналов, поступающих на входы этого блока. Выработанный блоком сравнения 29 сигнал вновь начинает поступать на вход блока 30 выработки исполнительной команды, что приводит к выработке указанным блоком соответствующей команды.
Таким образом, как только произойдет снижение амплитуды качаний до некоторого определенного уровня, зависящего от чувствительности блока 29, так сразу начнет вырабатываться сигнал на выходе этого блока, который препятствует дальнейшему снижению амплитуды качаний, так как вновь блок 30 начнет вырабатывать команду, в соответствии с которой на катушки возбуждения 21 и 22 вновь начнет поступать напряжение питания, в результате чего вновь происходит восстановление амплитуды качания до заданного значения описанным выше способом. Затем описанный выше процесс вновь и вновь повторяется, вследствие чего не происходит заметного снижения амплитуды качаний, т.е. в системе осуществляется поддержание качаний в соответствии с заданным значением амплитуды. По окончании заданного времени качания, установленного в самом начале, устройство временной задержки разрывает цепь питания приводного электродвигателя 10, качания затухают и гамак останавливается.
В предпочтительном варианте выполнения предлагаемого устройства с целью создания дополнительных удобств при пользовании гамаком блок 8 управления выполняется в виде средства дистанционного управления, в котором дополнительно введены блоки дистанционной передачи и приема команд и пульт дистанционного управления, с помощью которых осуществляется дистанционное задание общей продолжительности качания, отключение и остановка гамака. Кроме того дистанционно может изменяться значение уровня сигнала, соответствующее задаваемой амплитуде качаний.
Изобретение может использоваться главным образом в виде гамаков с вертикальными стойками стационарной конструкции, выполненных в виде постоянно врытых в землю столбов с установленными на них крюками для подвески гамака.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТИВОУГОННЫЙ КОМПЛЕКС | 2007 |
|
RU2349471C2 |
| Устройство для выполнения рисунков | 1981 |
|
SU1134407A1 |
| Устройство для коммутации силовых электрических цепей | 1979 |
|
SU1003188A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| Стенд для испытания подшипников качения | 1987 |
|
SU1532832A1 |
| АВТОМАТИЗИРОВАННЫЙ СТАНОК ДЛЯ ПРОДОРАЖИВАНИЯ ЯКОРНЫХ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 2005 |
|
RU2291763C1 |
| Двигатель | 2020 |
|
RU2733794C1 |
| Импульсный электромагнитный клапан (варианты) | 2021 |
|
RU2778999C1 |
| Механизм возвратно-поступательного перемещения | 1986 |
|
SU1415351A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ДЛИННОХОДОВОЙ СТАНОК-КАЧАЛКА | 2004 |
|
RU2267649C2 |


Изобретение относится к технике, связанной с созданием предметов для отдыха, а более конкретно к конструкции гамаков. Цель изобретения: улучшение эксплуатационных свойств гамака путем введения в его конструкцию раскачивающего механизма. Поставленная цель достигается в гамаке с раскачивающим устройством за счет того, что известная конструкция гамака, состоящего из опорной поверхности для размещения человека и средств крепления ее к внешним опорам в виде пары планок с растяжками, снабжена средством для передачи движения опорной поверхности и раскачивающим механизмом. Последний состоит из исполнительного органа и средства управления, установленных на опоре. Опора закреплена на одной из вертикальных стоек. Одна из планок выполнена с возможностью взаимодействия с раскачивающим механизмом с помощью средства для передачи движения опорной поверхности. В предпочтительном варианте выполнения гамака раскачивающий механизм содержит приводной электродвигатель и магнитный механизм возвратно-поступательного перемещения. 5 з.п. ф-лы, 5 ил.
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
