Изобретение относится к средствам художественного оформления изделий, конкретнее к устройствам для выполнения рисунков. Известно устройство, содержащее головки для выполнения рисунков, соединенные со схемой управления и кинематически связанные с исполнительными механизмами, привод, связанный со схемой его управления и контактные механизмы считывания программы выполнения рисунков 1.
Недостатком устройств; является жесткая связь исполнительных механизмов головок для выполнения рисунков, контактных механизмов считывания программы рисунков и привода, в результате чего остаются ложные следы, низкое качество выжигания. Цель изобретения - повышение качества выжигания путем исключения ложных следов.
Поставленная цель достигается тем, что устройство, для выполнения рисунков, преимупдественно для выжигания, содержащее головки для выполнения рисунков, соединенные со схемой управления и кинематически связанные с исполнительными механизмами, привод, связанный со схемой его управления, и контактные механизмы считывания программы выполнения рисунков, имеет дополнительный контактный механизм считывания и электромагнитную муфту управления головками для выполнения рисунков, причем электромагнитная муфта управления расположена между приЕ5ОДОм и исполнительными механизмами головок для выполнения рисунков, а первый вывод обмотки электромагнитной муфты соединен со схемой управления головками для выполнения рисунков, аВторой вывод чiгpeз дополнительный контактный механизм считывания соединен со схемой управления приводом.
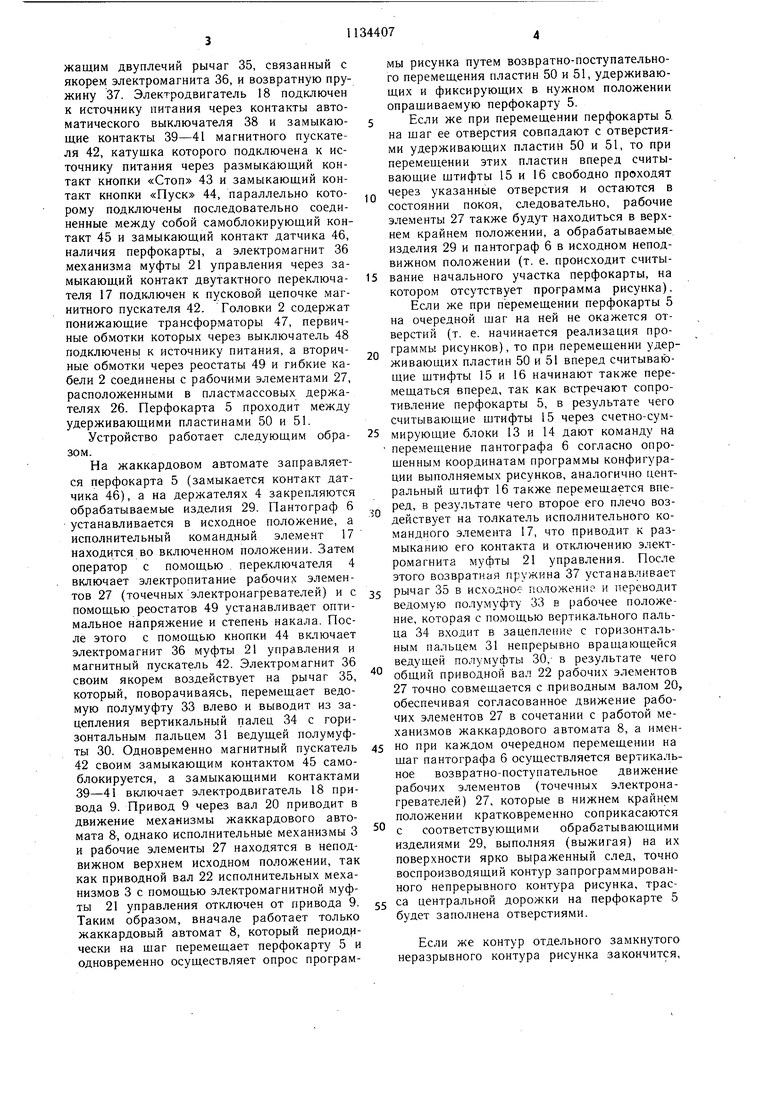
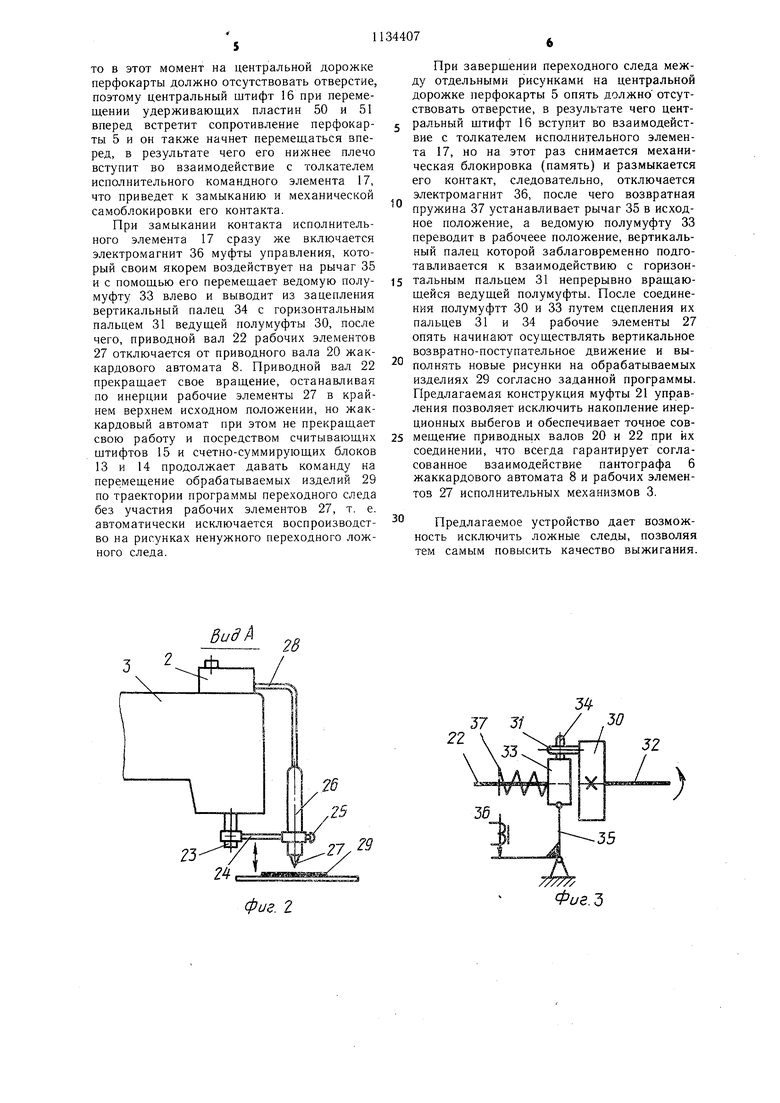
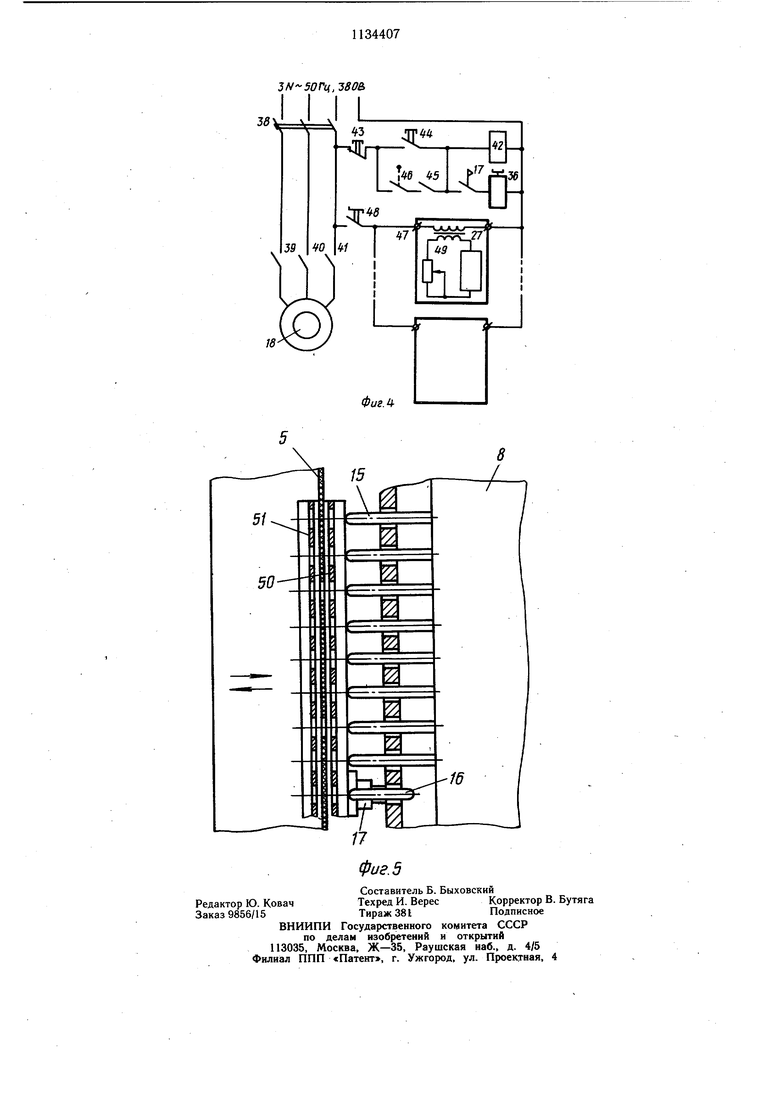
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг. (головка для выполнения рисунков); на фиг. 3 - кинематическая схема и устройство муфты управления; на фиг 4 - принципиальная электрическая схема устройства; на фиг. 5 - устройство дополнительного контактного механизма считывания программы исключения ложных следов на рисунках.
Устройство состоит из стола 1, на каждой рабочей позиции которого установлены головки 2 для выполнения рисунков и исполнительные механизмы 3, держателей 4 обрабатываемых изделий, перфокарты 5 с нанесенной на ней программой выполнения рисунков, например на центральной дорожке програмой исключения ненужных ложных переходных следов на выполняемых рисунках, пантографа 6 с общей рамой 7, несущей на себе держатели 4, жаккардового автомата 8, привода 9, электрошкафа 10 с контрольно-пусковой аппаратурой к нити
11 ДЛЯ хранения перфокарт и рабочего инструмента. Жаккардовый автомат 8 содержит механизм 12-для транспортировки перфокарты 5, два счетно-суммирующих передаточных блока 13 и 14, каждый из которых с одной стороны связан с пантографом 6 через соответствующие координатные зубчатые рейки (не показаны), а с другой стороны взаимодействует с перфокартой 5 через контактные механизмы считывания программы выполнения рисунков и программы исключения ложных следов на рисунках. Контактные механизмы считывания программы выполнения рисунков состоят из набора штифтов 15, предназначенных для опроса координат (X, У) конфигурации рисунков.
Контактный механизм считывания программы исключения ложных следов на рисунках состоит только из одного штифта 16 (например, центрального причем этот штифт выполнен в виде нэрнирно закрепленного подпружиненного двуплечего рычага, одно плечо которого расположено в пределах жаккардового автомата и свободный его конец изогнут под прямым углом и взаимодействует с перфокартой, а второе плечо вынесено за пределы жаккардового автомата и свобо.а.ный его конец взаимодействует с исполнительным командным элементом 17 (папри.мер, двутактным переключателем, имеюш,им механическую блокировку замыкания электрических контактов). Привод 9 включает в себя электродвигатель 1, вал которого через соединительный узел 19 неразрывно связан с приводным валом 20 жаккардового автомата и через электро.магнитную муфту 21 управления связан с общи.м ппчводиым валом 22 исполнительных .мехаH i3VO3 3. Исполнительные механизмы 3 содержат поводки 23 вертикального возвратно-поступательного действия, к которы.м закреплены соединительные кронштейны 24, на свободных концах которых с помощью стопорных винтов 25 закреплены держатели 26 рабочих элементов 27, соединенных с соответствующими головками 2 посредством гибкого кабеля 2. Рабочие элементы 27 .могут быть выполнены в виде точечных электронагревателей (или в виде гравировальных сверл) с возможностью регулирования их высоты расположения относительно изготавливаемых из.аелий 29, что позволяет подобрать необходимую глубину и контрастность выполнения рисунка. Муфта 21 управления включает в себя ведущую полумуфту 30 с горизонтальнг.1м пальцем 31, неразрывно связанную посредством промежуточного вала 32 с соединительным узлом 19 привода 9, а также ведомую полу.муфту 33 с вертикальны.м пальцем 34, свободно сидящую на обш.ем приводном валу 22 поводков 23 исполнительных механизмов 3, которая скзбжепа механизмом уира,ЕЛ(-ния, содержащим двуплечий рычаг 35, связанный с якорем электромагнита 36, и возвратную пружину 37. Электродвигатель 18 подключен к источнику питания через контакты автоматического выключателя 38 и замыкающие контакты 39-41 магнитного пускателя 42, катушка которого подключена к источнику питания через размыкающий контакт кнопки «Стоп 43 и замыкающий контакт кнопки «Пуск 44, параллельно которому подключены последовательно соединенные между собой самоблокирующий контакт 45 и замыкающий контакт датчика 46, наличия перфокарты, а электромагнит 36 механизма муфты 21 управления через замыкающий контакт двутактного переключателя 17 подключен к пусковой цепочке магнитного пускателя 42. Головки 2 содержат понижающие трансформаторы 47, первичные обмотки которых через выключатель 48 подключень к источнику питания, а вторичные обмотки через реостаты 49 и гибкие кабели 2 соединены с рабочими элементами 27, расположенными в пластмассовых держателях 26. Перфокарта 5 проходит между удерживающими пластинами 50 и 51.
Устройство работает следующим образом.
На жаккардовом автомате заправляется перфокарта 5 (замыкается контакт датчика 46), а на держателях 4 закрепляются обрабатываемые изделия 29. Пантограф 6 устанавливается в исходное положение, а исполнительный командный элемент 17 находится во включенном положении. Затем оператор с помощью переключателя 4 включает электропитание рабочих элементов 27 (точечных электронагревателей) и с помощью реостатов 49 устанавлива,ет оптимальное напряжение и степень накала. После этого с помощью кнопки 44 включает электромагнит 36 муфты 21 управления и магнитный пускатель 42. Электромагнит 36 своим якорем воздействует на рычаг 35, который, поворачиваясь, перемещает ведомую полумуфту 33 влево и выводит из зацепления вертикальный палец 34 с горизонтальным пальцем 31 ведущей полумуфты 30. Одновременно магнитный пускатель 42 своим замыкающим контактом 45 самоблокируется, а замыкающими контактами 39-41 включает электродвигатель 18 привода 9. Привод 9 через вал 20 приводит в движение механизмы жаккардового автомата 8, однако исполнительные механизмы 3 и рабочие элементы 27 находятся в неподвижном верхнем исходном положении, так как приводной вал 22 исполнительных механизмов 3 с помощью электромагнитной муфты 21 управления отключен от привода 9. Таким образом, вначале работает только жаккардовый автомат 8, который периодически на шаг перемещает перфокарту 5 и одновременно осуществляет опрос программы рисунка путем возвратно-поступательного перемещения пластин 50 и 51, удерживающих и фиксирующих в нужном положении опрашиваемую перфокарту 5. Если же при перемещении перфокарты 5,
на щаг ее отверстия совпадают с отверстиями удерживающих пластин 50 и 51, то при перемещении этих пластин вперед считывающие штифты 15 и 16 свободно проходят через указанные отверстия и остаются в состоянии покоя, следовательно, рабочие элементы 27 также будут находиться в верхнем крайнем положении, а обрабатываемые изделия 29 и пантограф 6 в исходном неподвижном положении (т. е. происходит считывание начального участка перфокарты, на которо.м отсутствует программа рисунка). Если же при перемещении перфокарты 5 на очередной шаг на ней не окажется отверстий (т. е. начинается реализация программы рисунков), то при перемещении удерживающих пластин 50 и 51 вперед считывак)щие штифты 15 и 16 начинают также перемещаться вперед, так как встречают сопротивление перфокарты 5, в результате чего считывающие щтифты 15 через счетно-сум5 мирующие блоки 13 и 14 дают команду на перемещение пантографа 6 согласно опрошенным координатам программы конфигурации выполняемых рисунков, аналогично центральный штифт 16 также перемещается вперед, в результате чего второе его плечо воздействует на толкатель исполнительного командного элемента 17, что приводит к размыканию его контакта и отключению электромагнита муфты 21 управления. После этого возвратная пружина 37 устанавливает
5 рычаг 35 в исходное поло.жение и переводит ведомую полумуфту 33 в рабочее положение, которая с по.мощью вертикального пальца 34 входит в зацепление с горизонтальным пальцем 31 непрерывно врапд.аюшейся ведущей полумуфты 30,- в результате чего
общий приводной вал 22 рабочих элементов 27 точно совмещается с приводным валом 20, обеспечивая согласованное движение рабочих элементов 27 в сочетании с работой механизмов жаккардового автомата 8, а нмен5 но при каждом очередном перемещении на шаг пантографа 6 осуществляется вертикальное возвратно-поступательное движение рабочих элементов (точечных электронагревателей) 27, которые в нижнем крайнем положении кратковременно соприкасаются
с соответствующими обрабатывающими изделиями 29, выполняя (выжигая) на их поверхности ярко выраженный след, точно воспроизводящий контур запрограммированного непрерывного контура рисунка, трасса центральной дорожки на перфокарте 5 будет заполнена отверстиями.
Если же контур отдельного замкнутого неразрывного контура рисунка закончится.
то в этот момент на центральной дорожке перфокарты должно отсутствовать отверстие, поэтому центральный штифт 16 при перемещении удерживающих пластин 50 и 51 вперед встретит сопротивление перфокарты 5 и он также начнет перемещаться вперед, в результате чего его нижнее плечо вступит во взаимодействие с толкателем исполнительного командного элемента 17, что приведет к замыканию и механической самоблокировки его контакта.
При замыкании контакта исполнительного элемента 17 сразу же включается электромагнит 36 муфты управления, который своим якорем воздействует на рычаг 35 и с помощью его перемещает ведомую полумуфту 33 влево и выводит из зацепления вертикальный палец 34 с горизонтальным пальцем 31 ведущей полу муфты 30, после чего, приводной вал 22 рабочих элементов 27 отключается от приводного вала 20 жаккардового автомата 8. Приводной вал 22 прекращает свое вращение, останавливая по инерции рабочие элементы 27 в крайнем верхнем исходном положении, но жаккардовый автомат при этом не прекращает свою работу и посредством считывающих штифтов 15 и счетно-суммирующих блоков 13 и 14 продолжает давать команду на перемещение обрабатываемых изделий 29 по траектории программы переходного следа без участия рабочих элементов 27, т. е. автоматически исключается воспроизводство на рисунках ненужного переходного ложного следа.
При завершении переходного следа между отдельными рисунками на центральной дорожке перфокарты 5 опять должно отсутствовать отверстие, в результате чего центральный штифт 16 вступит во взаимодействие с толкателем исполнительного элемента 17, но на этот раз снимается механическая блокировка (память) и размыкается его контакт, следовательно, отключается электромагнит 36, после чего возвратная пружина 37 устанавливает рычаг 35 в исходное положение, а ведомую полумуфту 33 переводит в рабочеее положение, вертикальный палец которой заблаговременно подготавливается к взаимодействию с горизонтальным пальцем 31 непрерывно вращающейся ведущей полумуфты. После соединения полумуфтт 30 и 33 путем сцепления их пальцев 31 и 34 рабочие элементы 27 опять начинают осуществлять вертикальное возвратно-поступательное движение и вы полнять новые рисунки на обрабатываемых изделиях 29 согласно заданной программы. Предлагаемая конструкция муфты 21 управления позволяет исключить накопление инерционных выбегов и обеспечивает точное совмещение приводных валов 20 и 22 при их соединении, что всегда гарантирует согласованное взаимодействие пантографа 6 жаккардового автомата 8 и рабочих элементов 27 исполнительных механизмов 3.
Предлагаемое устройство дает возможность исключить ложные следы, позволяя тем самым повысить качество выжигания.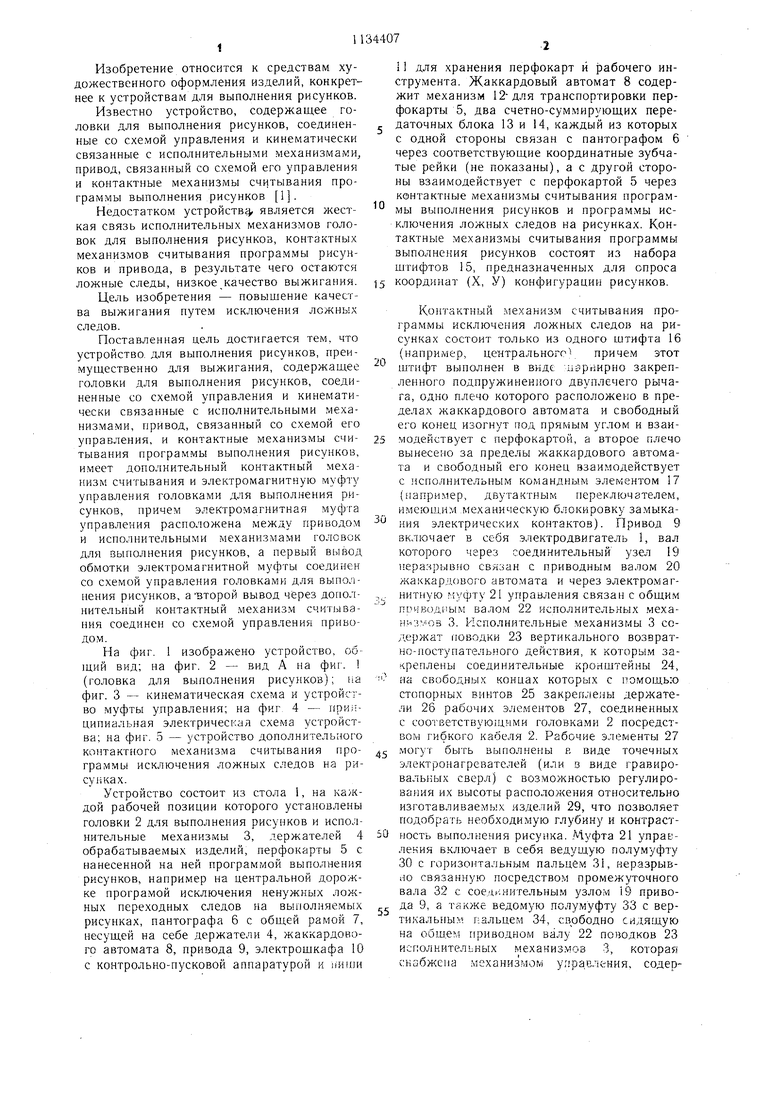
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для НАБИВКИ КОЛКОВ | 1972 |
|
SU349774A1 |
| Стенд с программным управлением для проверки счетных машин на правильность счета | 1957 |
|
SU122646A1 |
| Электромагнитный жаккардовый механизм | 1989 |
|
SU1737042A1 |
| Программное устройство для систем автоматического регулирования | 1961 |
|
SU149291A1 |
| АВТОМАТ ДЛЯ УКЛАДКИ ПРОВОДОВ В ЖГУТЫ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1967 |
|
SU190450A1 |
| Устройство для переключения ремизоподъемной каретки ткацкого станка на обратный ход | 1986 |
|
SU1461781A1 |
| Товарный регулятор ткацкого станка | 1982 |
|
SU1101484A1 |
| Плосковязальная двухфонтурная жаккардовая машина | 1959 |
|
SU125330A1 |
| Плоскофанговый автомат для вязания регулярных изделий | 1961 |
|
SU146425A1 |
| Автомат для заливки стеклоизоляции в цоколь | 1987 |
|
SU1511786A1 |
УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ РИСУНКОВ, преимущественно для выжигания, содержащее головки для выполнения рисунков, соединенные со схемой управления и кинематически связанные с исполнительными механизмами, привод, связанный со схемой его управления, и контактные механизмы считывания программы выполнения рисунков, отличающееся тем, что, с целью повышения качества выжигания путем исключения ложных следов, оно имеет дополнительный контактный механизм считывания и электромагнитную муфту управления головками для выполнения рисунков, причем электромагнитная муфт& управления расположена между приводом и исполнительными механизмами головок для выполнения рисунков, а первый вывод обмотки электромагнитной муфты соединен со схемой управления головками для выполнения рисунков, а второй вывод через дополнительный контактный механизм считывания соединен со схемой управления приводом.
дид
23
fh-.У
2Ъ
24
фиг. 2
3/7
32
Фие.Ъ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Инструкция по эксплуатации к вышивальному автомату с несколькими головками фирмы «Цанго, Модель 7000, 1965. | |||
