Изобретение относится к активным подвескам транспортных средств, в частности к способам и устройствам управления демпфирующими свойствами системы подрессоривания.
Известно изобретение [1], которое относится к транспортному машиностроению, в частности к многоопорным транспортным средствам с активной управляемой системой подрессоривания. Оно включает в себя способ демпфирования вертикальных колебаний корпуса многоопорного транспортного средства, который заключается в рекуперации энергии вертикальных колебаний корпуса в подвесках средних опор, преобразовании ее в энергию давления, аккумулировании ее, а затем передаче в гидросистему подвесок крайних опор, где создается дополнительный стабилизирующий момент, уменьшающий угловые колебания корпуса. Конструкция, реализующая предлагаемый способ, содержит управляемые с помощью гидросистемы подвески крайних колес и неуправляемые подвески средних опор, снабженные системой рекуперации энергии, направляемой в подвеску крайних опор.
Недостатком конструкции является то, что дополнительный стабилизирующий момент создается только крайними подвесками. Измерение текущих составляющих движения – скорости угловых колебаний корпуса, вертикальных ускорений корпуса, а также положений балансиров опорных катков - не производится, а стабилизирующий момент создается только при возникновении вертикальных колебаний корпуса средних опор.
Известно автоматическое устройство регулирования сил сопротивления амортизаторов [2], включающее автоматический регулятор и управляемые амортизаторы, отличающееся тем, что оно дополнительно снабжено управляемыми амортизаторами на средних подвесках танка, автоматическим регулятором и датчиком скорости с возможностью изменения сопротивления амортизаторов в зависимости от скорости движения танка.
Недостаток устройства в том, что дополнительно установленные на средние подвески амортизаторы не оказывают значительного влияния на гашение угловых колебаний корпуса, а также не прослеживается связь между скоростью движения танка и реальным профилем дороги, что снижает эффективность устройства.
Известен управляемый гидравлический лопастной амортизатор [3], динамическое изменение степени демпфирования амортизатора и достигается за счет изменения вязкости рабочего тела амортизатора под воздействием электромагнитного поля в элементах управления. Адаптивное изменение величины давления в рабочих камерах производится в зависимости от линейных ускорений корпуса машины.
Недостатком конструкции является то, что изменение демпфирующих свойств осуществляется только в зависимости от ускорений, не учитывается угловое колебание корпуса, не описана работа устройства в составе системы подрессоривания и демпфирующие силы, возникающие при движении по неровной поверхности.
Преимуществом предложенной конструкции является предложенный способ адаптивного изменения демпфирующих сил лопастного амортизатора, который принят в качестве демпфирующего элемента системы подрессоривания.
Известно изобретение [4], которое относится к активным подвескам транспортных средств, в частности к устройствам для управления активными подвесками. Сущность: устройство содержит датчики 1-5 углов продольного и поперечного кренов, изменения статистического веса подрессоренной части, скорости движения транспортного средства и сил, действующих от подвесок колес на подрессоренную часть, блоки определения продольной и поперечной устойчивости и блок формирования сигналов равномерного распределения нагрузок между активными подвесками колес. По показаниям датчиков сил, действующих от подвесок на подрессоренную часть, датчиков скорости движения и продольного ускорения транспортного средства, формируются сигналы управления активными подвесками колес, которые корректируются в соответствии с сигналами датчиков углов продольного и поперечного крена и изменения статистического веса. Управление исполнительными механизмами осуществляется блоком формирования сигналов равномерного распределения между активными подвесками колес.
Недостаток устройства в том, что несмотря на схожесть подходов к решению задачи активного подрессоривания данная конструкция относится к колесным многоопорным транспортным средствам.
Недостаток устройства в том, что оно предназначено для активных систем подрессоривания с гидравлическим управлением демпфирующих сил, несмотря на это изобретение по своей технической сущности наиболее близко к предлагаемому и принято в качестве прототипа.
Задачей предлагаемого изобретения является обеспечение управления демпфирующими свойствами системы подрессоривания и повышение эффективности её работы при движении по неровной поверхности.
Поставленная задача решается тем, что предложен новый способ демпфирования колебаний корпуса танка с управляемой системой подрессоривания, заключающийся в создании демпфирующих сил, воздействующих на корпус со стороны подвески при движении по неровной поверхности. Его отличительной особенностью является то, что демпфирующие элементы системы подрессоривания выполнены в виде управляемых лопастных амортизаторов с магнитореологической жидкостью в качестве рабочего тела и встроенными элементами управления демпфированием в виде магнитореологических дросселей, которые обеспечивают адаптивное изменение степени демпфирования и возможность работы в управляемом и неуправляемом режимах.
Реализация способа решается системой управления демпфирующими свойствами системы подрессоривания танка, состоящей из датчика скорости движения танка, датчика вертикальных ускорений на месте механика-водителя и датчика скорости угловых колебаний корпуса танка, четырех датчиков положения балансиров передних и задних подвесок, блока формирования управляющих сигналов, силового блока управления и элементов управления демпфированием подвесок.
Новизной конструкции является то, что управление демпфированием осуществляется за счет изменения физических свойств магнитореологической жидкости при протекании через магнитореологические дроссели управляемых лопастных амортизаторов, согласно установленному алгоритму работы и заданным в блок формирования управляющих сигналов значениям датчиков вертикальных ускорений сиденья механика-водителя, продольно-угловой скорости колебаний корпуса и датчиков положений балансиров передних и задних подвесок.
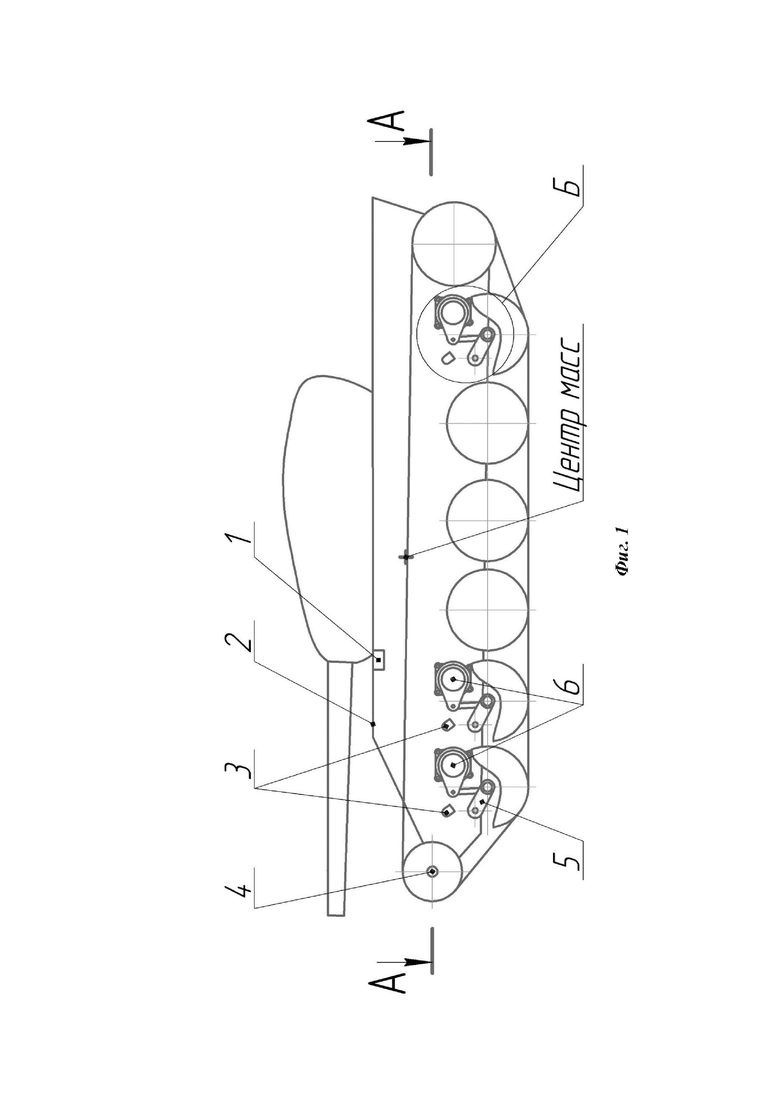
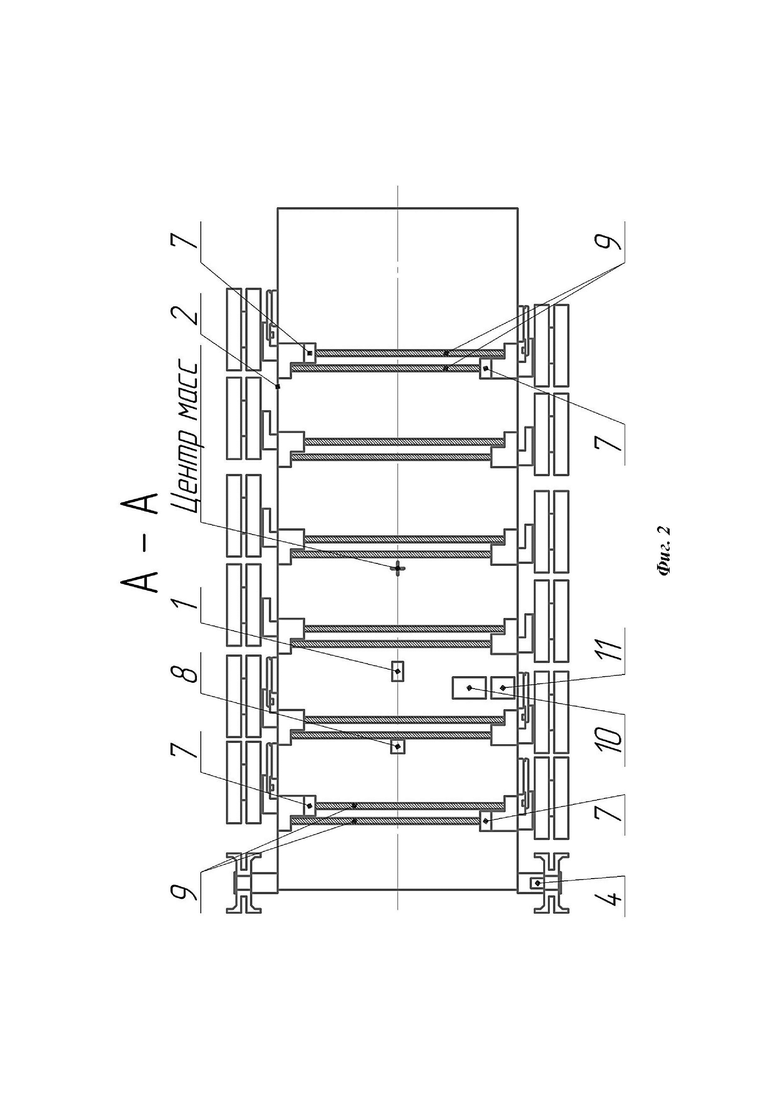
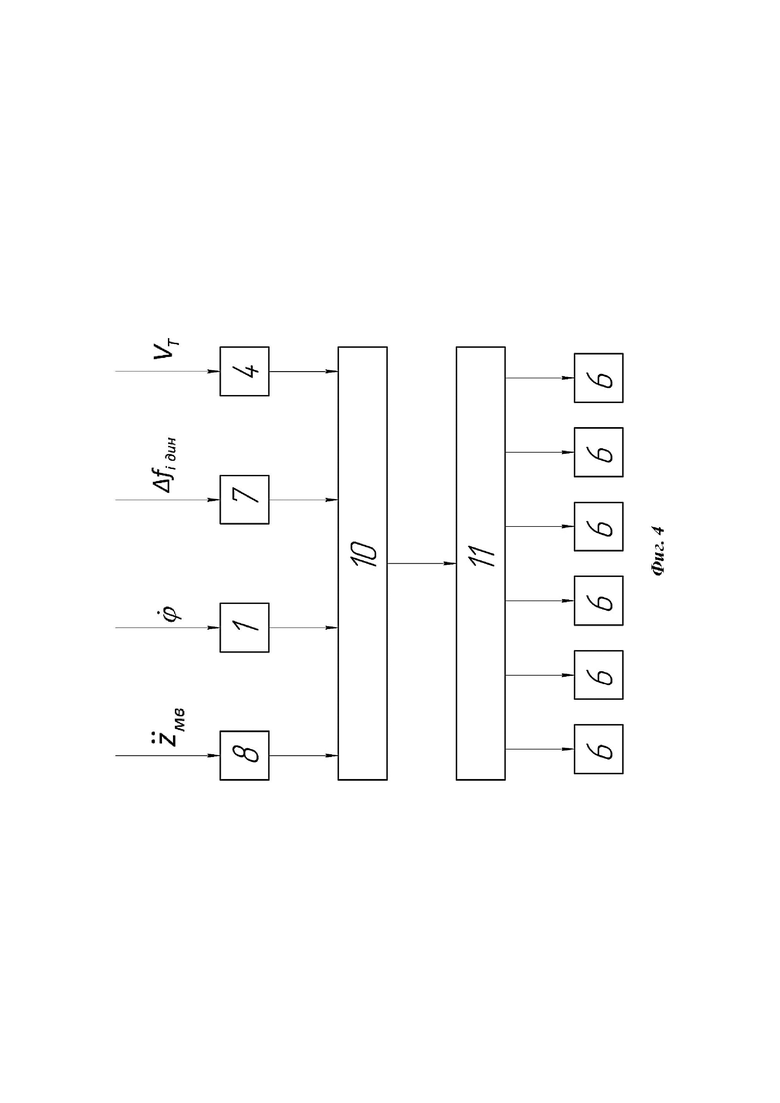
На фиг. 1 представлен общий вид танка, на фиг. 2 показано размещение блоков системы управления в корпусе, на фиг. 3 изображена подвеска с управляемым лопастным амортизатором, а на фиг. 4 – структурная схема системы управления демпфирующими свойствами системы подрессоривания танка.
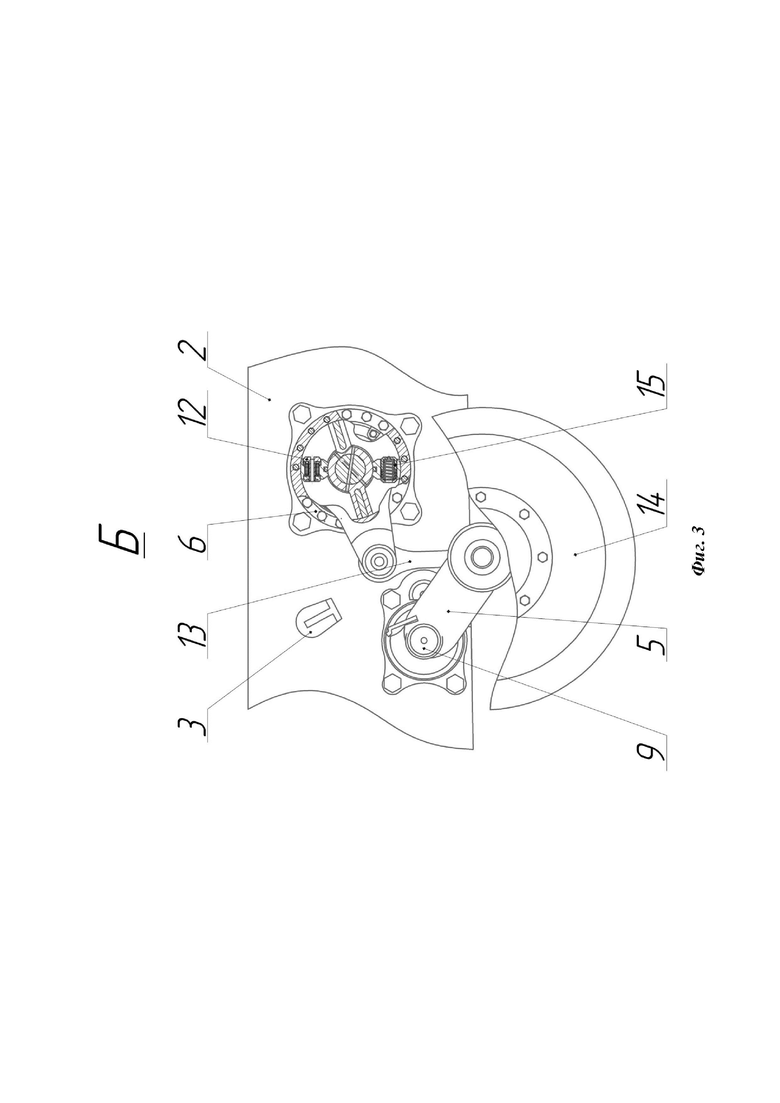
Система управления демпфирующими свойствами системы подрессоривания танка предназначена для уменьшения вертикальных ускорений и угловых колебаний корпуса 2 танка и состоит из датчика скорости движения танка 4, датчика вертикальных ускорений на месте механика-водителя 8 и датчика скорости угловых колебаний корпуса 1, четырех датчиков положения балансиров 7 передних и задних подвесок, блока формирования управляющих сигналов 10, силового блока управления 11 и элементов управления демпфированием подвесок (магнитореологические дроссели) 12, которые расположены в перегородках рабочих камер управляемых лопастных амортизаторов 6, в которых также установлены клапаны 15, которые открываются при достижении давления 100 кгс/см2 и предотвращают перегрев и выдавливание рабочей жидкости через уплотнительные соединения амортизатора. Начальное значение коэффициентов демпфирования управляемых лопастных амортизаторов, при отсутствии управления, составляет 32,87 кН⋅с/м, при подаче сигнала управления 4 А, коэффициент демпфирования составляет 38,29 кН⋅с/м.
Система управления работает следующим образом. При движении танка по неровной поверхности со скоростью VT, через левое направляющее колесо передается крутящий момент на датчик скорости 4, с которого сигнал поступает в блок формирования управляющих сигналов 10 и включает систему управления. При наезде на неровность танка передних опорных катков 14 поворачиваются их балансиры 5 и происходит закручивание торсионных валов 9, по углу закрутки которых, обеспечивается контроль положения балансиров. При динамическом ходе переднего опорного катка Δfi дин≥200 мм одной из сторон, датчики положения балансира 7 подает сигнал в блок формирования управляющих сигналов 10, где вырабатывается сигнал на повышение демпфирования соответствующих подвесок и передается в силовой блок 11, которым обеспечивается управление демпфированием соответствующих передних подвесок. В результате изменения физических свойств магнитореологической жидкости в магнитном поле дросселей 12, увеличиваются силы сопротивления амортизаторов 6 передаваемое через рычаги 13 на балансиры 5, что производится в целях предотвращения удара балансиров об ограничители 3 (пробития подвески).
В случае, когда подъем опорных катков 14 Δfi дин<200 мм, управление демпфированием осуществляется по значениям с датчика вертикальных ускорений 8 и датчика угловых скоростей 1. Данные с датчика 8 передаются в блок формирования управляющих сигналов 10, где при значении вертикальных ускорений корпуса  производится передача сигнала на силовой блок управления 11 и производится управление демпфирующих свойств передних подвесок. В целях предотвращения резонансных колебаний корпуса управление демпфирующими свойствами системы подрессоривания осуществляется согласно данным датчика скорости угловых колебаний корпуса 1. При значении текущей угловой скорости корпуса
производится передача сигнала на силовой блок управления 11 и производится управление демпфирующих свойств передних подвесок. В целях предотвращения резонансных колебаний корпуса управление демпфирующими свойствами системы подрессоривания осуществляется согласно данным датчика скорости угловых колебаний корпуса 1. При значении текущей угловой скорости корпуса  блок формирования сигналов 10 подает сигнал в силовой блок управления 11 на повышение демпфирования задних подвесок. При значении текущей угловой скорости корпуса
блок формирования сигналов 10 подает сигнал в силовой блок управления 11 на повышение демпфирования задних подвесок. При значении текущей угловой скорости корпуса  блок формирования сигналов 10 подает сигнал в силовой блок управления 11 на повышение демпфирования передних подвесок.
блок формирования сигналов 10 подает сигнал в силовой блок управления 11 на повышение демпфирования передних подвесок.
При отсутствии превышения ранее указанных значений, управление демпфированием системы подрессоривания не обеспечивается. В этом случае коэффициент демпфирования амортизаторов соответствует минимальному значению равному 32,87 кН⋅с/м, что позволяет уменьшить передачу вертикальных ускорений на корпус 2 при движении танка по поверхности, неровности которой соответствуют микрорельефу и не превышают 200 мм.
Изобретение позволяет обеспечить расширение функциональных возможностей путем одновременного улучшения плавности хода и повышения устойчивости движения танка, а также равномерного распределения нагрузок, действующих на элементы его системы подрессоривания.
Источники информации
1. Патент РФ №2041080, Способ демпфирования многоопорного транспортного средства и его система подрессоривания, 1993 г.
2. Заявка на изобретение РФ №2003103501, Автоматическое устройство регулирования сил сопротивления амортизаторов в зависимости от скорости танка, 2003 г.
3. Патент РФ №210655, Управляемый гидравлический лопастной амортизатор, 2021 г.
4. Патент РФ №2019438, Система управления активной подвеской транспортного средства, 1991 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2548823C2 |
| СПОСОБ И СИСТЕМА СТАБИЛИЗАЦИИ КОРПУСА ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2501668C1 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ МНОГООПОРНОГО ТРАНСПОРТНОГО СРЕДСТВА И ЕГО СИСТЕМА ПОДРЕССОРИВАНИЯ | 1993 |
|
RU2041080C1 |
| Способ динамического управления гидропневматической амортизаторной стойкой системы подрессоривания кабины транспортного средства | 2024 |
|
RU2828915C1 |
| Способ защиты экипажа и оборудования наземного бронированного транспортного комплекса с колёсной самоходной обитаемой эвакокапсулой | 2019 |
|
RU2710867C1 |
| Подвеска сиденья транспортного средства с активной системой изменения жёсткости на основе магнитоактивных эластомеров | 2016 |
|
RU2708797C2 |
| Гидроэластомерное упругодемпфирующее устройство системы подрессоривания транспортного средства | 2021 |
|
RU2767801C1 |
| Регулируемый магнитореологический пневматический амортизатор | 2021 |
|
RU2764210C1 |
| Способ демпфирования вынужденных колебаний объекта | 1990 |
|
SU1787810A1 |
| ПОДВЕСКА ОБЪЕКТА БРОНЕТАНКОВОЙ ТЕХНИКИ | 2015 |
|
RU2596206C1 |
Изобретение относится к подвескам транспортных средств. Система управления демпфирующими свойствами системы подрессоривания танка содержит датчик скорости движения танка, датчик вертикальных ускорений на месте механика-водителя, датчик скорости продольно-угловых колебаний корпуса танка, датчики положения балансиров передних и задних подвесок. Выходы датчиков соединены с блоком формирования управляющих сигналов. Блок формирования обеспечивает работу системы управления демпфирующими свойствами согласно заданным значениям и передачу сигналов в силовой блок управления. В блоке управления производится преобразование сигнала и передача его на элементы управления демпфированием соответствующих подвесок. Контроль значений датчиков и управление демпфирующими свойствами производится при наличии сигнала с датчика скорости движения танка. Достигается обеспечение управления демпфирующими свойствами системы подрессоривания и повышение эффективности её работы при движении по неровной поверхности. 2 н.п. ф-лы, 4 ил.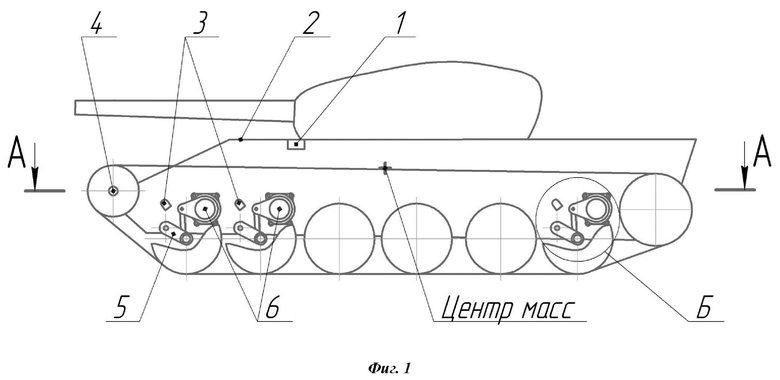
1. Способ управления демпфирующими свойствами системы подрессоривания танка, заключающийся в адаптивном изменении стабилизирующих усилий, воздействующих на корпус танка через систему подрессоривания при движении по неровной поверхности, отличающийся тем, что осуществляется управление демпфированием за счет изменения физических свойств магнитореологической жидкости при протекании через магнитореологические дроссели управляемых лопастных амортизаторов, согласно установленному алгоритму работы и заданным в блок формирования управляющих сигналов значениям величин вертикальных ускорений сиденья механика-водителя, продольно-угловой скорости колебаний корпуса и положений балансиров передних и задних подвесок, при этом контроль значений величин и управление демпфирующими свойствами производится при наличии сигнала с датчика скорости движения танка.
2. Система управления демпфирующими свойствами системы подрессоривания танка, содержащая датчик скорости движения танка, датчик вертикальных ускорений на месте механика-водителя, датчик скорости продольно-угловых колебаний корпуса танка, датчики положения балансиров передних и задних подвесок, выходы указанных датчиков соединены с блоком формирования управляющих сигналов, который обеспечивает работу системы управления демпфирующими свойствами согласно заданным значениям и передачу сигналов в силовой блок управления, в котором производится преобразование сигнала и передача его на элементы управления демпфированием соответствующих подвесок.
| СИСТЕМА УПРАВЛЕНИЯ АКТИВНОЙ ПОДВЕСКОЙ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019438C1 |
| УСТРОЙСТВО для СОЗДАНИЯ ЦВЕТОВЫХ ЭФФЕКТОВ | 0 |
|
SU210655A1 |
| Предохранительное устройство для смесителей воздуха с горючими газами | 1949 |
|
SU99609A1 |
| US 9951840 B2, 24.04.2018 | |||
| СПОСОБ НАНЕСЕНИЯ ЦИНКОВЫХ ПОКРЫТИЙ | 2009 |
|
RU2389828C1 |

