Изобретение относится к способам и устройствам уменьшения колебаний кузовов транспортных средств при изменении дорожных условий, управляющим воздействием на кузов через подвеску, снабженную устройствами регулирования ее характеристик.
Известна ходовая часть трактора [1], включающая остов, соединенный с гусеничным движителем, имеющим натяжные и ведущие колеса, соединенные с соответствующими механизмами и охваченные гусеницами, взаимодействующими с опорными катками, причем остов установлен с возможностью изменения своего положения относительно гусеничного движителя посредством гидроцилиндра, полости которого посредством гидравлического механизма регистрации отклонения остова от горизонтального положения сообщены с насосом. При этом в передней части остов посредством соответствующей оси, расположенной в плоскости симметрии ходовой части трактора, сообщен с балансиром и подрессорен с помощью торсионов относительно натяжных колес, а задняя часть остова сообщена с ведущим мостом посредством связанной с ним оси, также расположенной в упомянутой плоскости и установленной в вертикальном пазу проушины, жестко укрепленной на остове.
Недостаток устройства в низкой скорости срабатывания устройства изменения положения корпуса относительно гусеничного движителя, что неприемлемо для транспортных средств.
Известно автоматическое устройство регулирования сил сопротивления амортизаторов [2], включающее автоматический регулятор и управляемые амортизаторы, отличающееся тем, что оно дополнительно снабжено управляемыми амортизаторами на средних подвесках транспортного средства, автоматическим регулятором и датчиком скорости с возможностью изменения сопротивления амортизаторов в зависимости от скорости движения транспортного средства.
Недостаток устройства в том, что не прослеживается связь между скоростью движения транспортного средства и реальным профилем дороги, что снижает эффективность устройства.
Известна система управления активной подвеской транспортного средства [3].
Изобретение относится к активным подвескам транспортных средств, в частности к устройствам для управления активными подвесками. Сущность: устройство содержит датчики 1-5 углов продольного и поперечного кренов, изменения статистического веса подрессоренной части, скорости движения транспортного средства и сил, действующих от подвесок колес на подрессоренную часть, блоки 9, 10 определения продольной и поперечной устойчивости и блок 11 формирования сигналов равномерного распределения нагрузок между активными подвесками колес. По показаниям датчиков сил, действующих от подвесок на подрессоренную часть, датчиков скорости движения и продольного ускорения транспортного средства, формируются сигналы управления активными подвесками колес, которые корректируются в соответствии с сигналами датчиков углов продольного и поперечного крена и изменения статистического веса. Управление исполнительными механизмами осуществляется блоком формирования сигналов равномерного распределения между активными подвесками колес.
Недостаток устройства в том, что несмотря на схожесть подходов к решению задачи активного подрессоривания данная конструкция относится к колесным многоопорным транспортным средствам.
Известно изобретение [4], которое относится к транспортному машиностроению, в частности к многоопорным транспортным средствам с активной управляемой системой подрессоривания. Оно включает в себя способ демпфирования вертикальных колебаний корпуса многоопорного транспортного средства, который заключается в рекуперации энергии вертикальных колебаний корпуса в подвесках средних опор, преобразовании ее в энергию давления, аккумулировании ее, а затем передаче в гидросистему подвесок крайних опор, где создается дополнительный стабилизирующий момент, уменьшающий угловые колебания корпуса. Конструкция, реализующая предлагаемый способ, содержит управляемые с помощью гидросистемы подвески крайних колес и неуправляемые подвески средних опор, снабженные системой рекуперации энергии, направляемой в подвеску крайних опор. При этом повышается эффективность гашения колебаний и снижение энергозатрат. Недостатком конструкции является то, что дополнительный стабилизирующий момент создается только крайними подвесками. Измерение текущих составляющих движения - фактических углов наклона, угловых скоростей и вертикальных перемещений центра масс машины - не производится, а осуществляется только по факту их возникновения.
Несмотря на это последнее изобретение по своей технической сущности наиболее близко предлагаемому и принято в качестве прототипа.
Задачей предлагаемого изобретения является улучшение характеристик системы подрессоривания. Технический результат - управление системой подрессоривания в зависимости от дорожных условий при заданных допустимых параметрах колебаний в текущий момент времени.
Поставленная задача решается тем, что предложен новый способ подрессоривания транспортного средства, заключающийся в использовании демпфирующих свойств подвесок для уменьшения угловых и вертикальных колебаний кузова. При этом во время движения транспортного средства измеряют текущие угловые отклонения и угловые скорости его кузова в продольной и поперечной плоскостях, а также вертикальные скорости его центра масс, выбирают режимы подрессоривания - неуправляемый при колебаниях кузова, меньших допустимых для данных условий движения, и управляемый при колебаниях кузова выше допустимых, в последнем случае рассчитывают текущую требуемую величину силового управляющего воздействия на колесо через подвеску по выражению

где φ, γ - углы колебаний кузова в продольной и поперечной плоскостях соответственно, радиан,






затем воздействием системы управления демпфирующие элементы подвесок трансформируют в исполнительные механизмы и формируют с их помощью требуемое управляющее силовое воздействие на колесо.
Переключение режимов работы, а именно переход с неуправляемого режима на управляемый момент происходит автоматически или вручную.
Для реализации способа заявителем предложена система подрессоривания транспортного средства, содержащая упругие и демпфирующие элементы, установленные на кузове машины и кинематически связанные с балансирами подвесок. Ее демпфирующие элементы выполнены в виде двухрежимных моментных лопастных гидроцилиндров с возможностью управляемого и неуправляемого режимов работы, каждый из которых соединен гидравлической связью с гидронасосом и с системой управления подвесок, снабжен компенсационной камерой, всасывающим и обратным клапанами, предохранительными клапанами, при этом к разноименным рабочим полостям гидроцилиндров последовательно друг за другом через дроссель и обратный клапан, а также распределитель гидроусилителя подсоединены блоки переключения режимов.
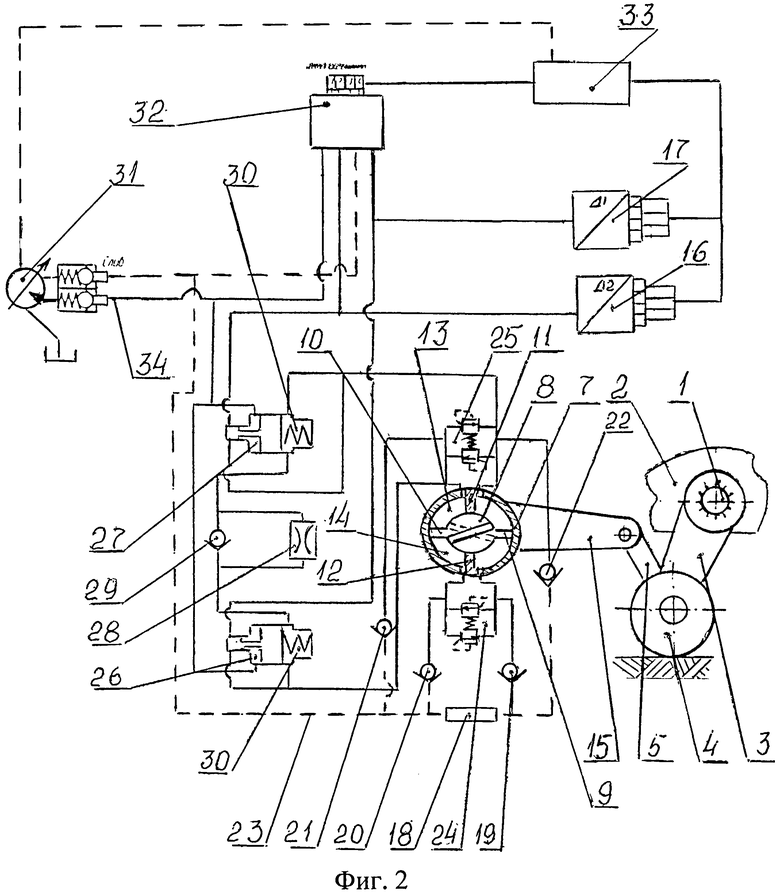
На фиг.1 представлена конструкция системы подрессоривания, а на фиг.2 - ее принципиальная электрогидравлическая схема управления гидравлическими лопастными цилиндрами. На фиг.3 изображен общий вид гидравлического лопастного цилиндра.
Система подрессоривания состоит из упругих элементов - торсионных валов 1, установленных в кузове 2 транспортного средства и кинематически связанных через балансиры 3 подвесок опорных колес 4 и тягу 5 с гидравлическим лопастным гидроцилиндром 6.
Последний выполнен в виде двухрежимного моментного гидравлического цилиндра, состоящего из корпуса 7, внутри которого установлен ротор 8 с лопастями 9 и 10, которые совместно с перегородками 11 и 12 образуют рабочие камеры 13 и 14. Ротор 8 снабжен рычагом 15, соединенным тягой 5 с балансиром 3 опорного колеса 4.
В рабочих камерах 13 и 14 установлены датчики давления 16 и 17. Расположенная на кузове 7 компенсационная камера 18 напрямую связана через всасывающие тарельчатые клапаны 19 и 20 с нижними полостями рабочих камер 13 и 14, а с верхними полостями - через всасывающие клапаны 21 и 22, расположенные в верхней перегородке 11 и соединенные с каналом 23 слива жидкости. В перегородках 11 и 12 установлены дисковые напорные клапаны 24 и 25 соответственно обратного и прямого хода, которые гидравлически связаны с блоками 26 и 27 переключения режимов работы гидравлического лопастного гидроцилиндра 6.
Блоки 26 и 27 переключения режимов последовательно соединены друг с другом через дроссель 28 и обратный клапан 29. Каждый блок своим отсечным подпружиненным клапаном 30 гидравлически связан с насосной станцией 31 и электрогидроусилителем 32, управляемыми системой управления 33.
Система управления 33 обеспечивает возможность гидравлическому лопастному гидроцилиндру 6 работать как в управляемом, так и в неуправляемом режимах. Неуправляемый режим осуществляется отключением системы управления 33 гидропривода - насосной станцией 31. При этом происходит падение давления в магистрали питания 34 и отсечные клапаны 30 под действием своих пружин, занимая крайнее левое положение, перекрывают гидравлическую связь электрогидроусилителя 32 с блоками переключения режимов работы 26 и 27 и гидравлическим лопастным гидроцилиндром 6.
Последний начинает работать как лопастной гидравлический амортизатор, скоростные характеристики которого формируются за счет потоков рабочей жидкости: на прямом ходе - из рабочей камеры 14 прямого хода через дроссель 28 в рабочую камеру 13 обратного хода, а на обратном ходе - из рабочей камеры 13 через дроссель 28 и клапан 29 в камеру 14 прямого хода.
При увеличении в рабочих камерах 13 и 14 объема жидкости из-за разогрева при длительной работе гидравлического лопастного гидроцилиндра 6 происходит сброс жидкости в компенсационную камеру 18 через клапаны 19 и 20. При недостатке в рабочих камерах 13 и 14 жидкости происходит подсос из компенсационной камеры 18 через тарельчатые клапаны 21 и 22.
При отклонении кузова 2 машины от ее статического положения на угол больше заданной величины система управления 33 начинает работать в управляемом режиме и включает гидропривод 31 и выдает электрический сигнал определенной полярности и напряжения, соответствующий этому мгновенному отклонению, электрогидроусилителю 32. При этом создается усилие на опорном колесе 4 нужного направления.
В результате работы гидропривода 31 отсечные клапаны 30 блоков 26 и 27 переключения режимов работы, сжимая пружины клапанов 30, перемещаются в крайнее правое положение и отсекают гидравлическую связь рабочих камер 13 и 14 с клапаном 29 и дросселями 28, тем самым открывая связь рабочих камер 13 и 14 с электрогидроусилителем 32 и гидроприводом 31. В этом случае гидравлический лопастной гидроцилиндр 6 работает как моментный гидравлический цилиндр. Сила, воздействующая на подвеску, появляется в результате возникающего перепада давлений между рабочими камерами 13 и 14 и формируется в соответствии с выбранным законом управления
где φ, γ - углы колебаний кузова в продольной и поперечной плоскостях соответственно, радиан,





Обратная связь исполнительного органа системы управления 33 осуществляется за счет контроля действительного давления жидкости внутри рабочих камер 13 и 14 датчиками давления 16 и 17, сигналы которых поступают в систему управления 33 и суммируются с сигналом текущего положения кузова 2 транспортного средства. При достижении в одной из рабочих камер 13 (14) давления жидкости, соответствующего началу открытия клапанов 24 (25), расположенных в перегородках 11 и 12 гидравлического лопастного гидроцилиндра 6, открывается напорный клапан 24 (25).
При обеспечении требуемого положения кузова 2 транспортного средства гидравлический лопастной гидроцилиндр 6 в зависимости от дорожных условий работает в заданном режиме или переключается в неуправляемый режим.
Заявителем разработана опытная конструкция устройства, которая подтвердила заявленные преимущества.
Литература
1. Заявка №99107097/13, Ходовая часть гусеничного трактора, 1999 г.
2. Заявка РФ №2003103501/11, Автоматическое устройство регулирования сил сопротивления амортизаторов, 2003 г.
3. Патент РФ №2019438, Система управления активной подвеской транспортного средства, B60G 25/00,1991 г.
4. Патент РФ №2041080, Способ демпфирования колебаний многоопорного транспортного средства, 1995 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система управления демпфирующими свойствами системы подрессоривания танка | 2024 |
|
RU2826323C1 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ МНОГООПОРНОГО ТРАНСПОРТНОГО СРЕДСТВА И ЕГО СИСТЕМА ПОДРЕССОРИВАНИЯ | 1993 |
|
RU2041080C1 |
| СПОСОБ И СИСТЕМА СТАБИЛИЗАЦИИ КОРПУСА ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2501668C1 |
| СИСТЕМА НАКЛОНА КУЗОВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2011 |
|
RU2476338C1 |
| СИСТЕМА НАКЛОНА КУЗОВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2012 |
|
RU2492085C1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ РЕССОРА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2209735C1 |
| ХОДОВАЯ ЧАСТЬ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2329908C2 |
| Гидропневматическая независимая подвеска колесного модуля транспортного средства | 2017 |
|
RU2682943C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2566174C1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2116894C1 |

Изобретение относится к способам и устройствам уменьшения колебаний кузовов транспортных средств при изменении дорожных условий. Система подрессоривания транспортного средства содержит упругие и демпфирующие элементы, которые установлены на кузове машины и кинематически связаны с балансирами подвесок. Демпфирующие элементы выполнены в виде двухрежимных моментных лопастных гидроцилиндров с возможностью управляемого и неуправляемого режимов работы. К разноименным рабочим полостям гидроцилиндров последовательно друг за другом через дроссель, обратный клапан и распределитель гидроусилителя подсоединены блоки переключения режимов. Для подрессоривания транспортного средства используют демпфирующие свойства подвесок для уменьшения угловых и вертикальных колебаний кузова. Во время движения транспортного средства измеряют текущие угловые отклонения и угловые скорости его кузова в продольной и поперечной плоскости и вертикальные скорости его центра масс. Рассчитывают текущую требуемую величину силового управляющего воздействия на колесо через подвеску, а затем управляющим воздействием системы управления демпфирующие элементы подвесок трансформируют в исполнительные механизмы и формируют с их помощью требуемое управляющее силовое воздействие на колесо. Достигается управление системой подрессоривания в зависимости от дорожных условий. 2 н.п. ф-лы, 3 ил.
1. Способ подрессоривания транспортного средства, заключающийся в использовании демпфирующих свойств подвесок для уменьшения угловых и вертикальных колебаний кузова, заключающийся в том, что во время движения транспортного средства измеряют текущие угловые отклонения и угловые скорости его кузова в продольной и поперечной плоскостях, а также вертикальные скорости его центра масс, выбирают режимы подрессоривания - неуправляемый, при колебаниях кузова, меньших допустимых для данных условий движения, и управляемый, при колебаниях кузова выше допустимых, в последнем случае рассчитывают текущую требуемую величину силового управляющего воздействия на колесо через подвеску по выражению:
где φ, γ - углы колебаний кузова в продольной и поперечной плоскостях соответственно, радиан;



затем управляющим воздействием системы управления демпфирующие элементы подвесок трансформируют в исполнительные механизмы и формируют с их помощью требуемое управляющее силовое воздействие на колесо.
2. Система подрессоривания транспортного средства, содержащая упругие и демпфирующие элементы, установленные на кузове машины и кинематически связанные с балансирами подвесок, при этом демпфирующие элементы выполнены в виде двухрежимных моментных лопастных гидроцилиндров с возможностью управляемого и неуправляемого режимов работы, каждый из которых соединен гидравлической связью с гидронасосом и с системой управления подвесок, снабжен компенсационной камерой, всасывающим и обратным клапанами, предохранительными клапанами, при этом к разноименным рабочим полостям гидроцилиндров последовательно друг за другом через дроссель и обратный клапан, а также распределитель гидроусилителя подсоединены блоки переключения режимов.
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ МНОГООПОРНОГО ТРАНСПОРТНОГО СРЕДСТВА И ЕГО СИСТЕМА ПОДРЕССОРИВАНИЯ | 1993 |
|
RU2041080C1 |
| Активная пневмогидравлическая подвеска транспортного средства | 1985 |
|
SU1243964A1 |
| Устройство для ввода в пневмотранспортную установку сыпучего материала | 1986 |
|
SU1440826A1 |

