Изобретение относится к способам и устройствам стабилизации корпуса гусеничных транспортных средств путем воздействия на корпус через подвеску, снабженную устройствами регулирования характеристик амортизаторов или для регулирования расстояний между поверхностью дороги и подрессоренной частью транспортного средства.
Известен способ стабилизации динамических сил [1], действующих через упругие элементы подвески на корпус движущегося транспортного средства, заключающийся в том, что принудительно растягивают или сжимают упругие элементы подвесок в функции изменения положения корпуса транспортного средства относительно поверхности дороги. Недостаток способа в трудности реализации идеи при отсутствии информации истинного взаимного положения дороги и корпуса.
Известно автоматическое устройство регулирования сил сопротивления амортизаторов [2], включающее автоматический регулятор и управляемые амортизаторы, отличающееся тем, что оно дополнительно снабжено управляемыми амортизаторами на средних подвесках танка, автоматическим регулятором и датчиком скорости с возможностью изменения сопротивления амортизаторов в зависимости от скорости движения танка.
Недостаток устройства в том, что не прослеживается связь между скоростью движения танка и реальным профилем дороги, что снижает эффективность устройства.
Известна управляемая система подрессоривания [3], содержащая комбинированные амортизаторы, включающие датчики ускорения, систему клапанов, силовой цилиндр, гидронасос, гидроаккумуляторы, сливной бак, регулируемый демпфер для гашения свободных колебаний корпуса, временно переключающийся при большом расходе энергии в режим работы насоса и дополнительно к основному гидронасосу, заряжающий аккумуляторы, энергия которых расходуется в последующем на управление положением корпуса транспортного средства.
Недостаток устройства в том, что оно периодически работает или в активном режиме, или в режиме насоса. В последнем случае оно не может выполнять свои прямые функции активного подрессоривания.
Известно изобретение [4], которое относится к транспортному машиностроению, в частности к многоопорным транспортным средствам с активной управляемой системой подрессоривания. Оно включает в себя способ демпфирования вертикальных колебаний корпуса многоопорного транспортного средства, который заключается в рекуперации энергии вертикальных колебаний корпуса в подвесках средних опор, преобразовании ее в энергию давления, аккумулировании ее, а затем передаче в гидросистему подвесок крайних опор, где создается дополнительный стабилизирующий момент, уменьшающий угловые колебания корпуса. Конструкция, реализующая предлагаемый способ, содержит управляемые с помощью гидросистемы подвески крайних колес и неуправляемые подвески средних опор, снабженной системой рекуперации энергии, направляемой в подвеску крайних опор.
При этом повышается эффективность гашения колебаний и снижение энергозатрат. Недостатком конструкции является то, что дополнительный стабилизирующий момент создается только крайними подвесками.
Несмотря на это последнее изобретение по своей технической сущности наиболее близко предлагаемому и принято в качестве прототипа.
Задачей предлагаемого изобретения является повышение стабилизирующих свойств системы подрессоривания при улучшении компоновочных решений машины в целом.
Поставленная задача решается тем, что предложен новый способ стабилизации корпуса гусеничного транспортного средства с управляемой системой подрессоривания, заключающийся в создании стабилизирующих усилий, воздействующих на корпус со стороны подвески при движении транспортного средства по неровностям. Его отличительной особенностью является то, что энергию для создания стабилизирующих усилий получают за счет кинетической энергии вращения опорных катков при взаимодействии их с гусеницами транспортного средства при движении последнего, превращают ее в потенциальную энергию давления рабочей жидкости, полученную энергию аккумулируют, а затем расходуют в исполнительных механизмах системы подрессоривания, обеспечивающих стабилизацию корпуса.
Реализация способа решается системой стабилизации корпуса гусеничной машины, включающей ходовую часть с ведущими колесами и опорными катками, взаимодействующими с гусеницами, содержащей управляемую гидросистему подрессоривания, снабженную гидравлическим насосом, всасывающей, нагнетательной и сливной магистралями, пневмогидроаккумулятором, гидроусилителем, исполнительными механизмами и блоком управления. Новизной конструкции является то, что ее силовая часть выполнена в виде автономных блоков, установленных внутри опорных катков гусеничной машины, причем каждый из блоков снабжен гидравлическим радиально-поршневым насосом, который своим корпусом встроен внутрь массивной оси балансира, являющейся опорой катка, а вал насоса через ступицу соединен с ободом этого катка, при этом упомянутый гидронасос снабжен плоским распределителем, который сообщается со встроенными внутри тела балансира всасывающей магистралью, соединенной с баком, нагнетающей магистралью, соединенной с гидропневмоаккумулятором, проходящей через двухпозиционный электромагнитный клапан с гидроусилителем, блок переключения режимов, соединенный со сливной магистралью, и предохранительные клапаны, образующие блок управления, и соединенной с исполнительным механизмом, выполненным в виде управляемого моментного гидроцилиндра, корпус которого размещен в корпусе транспортного средства.
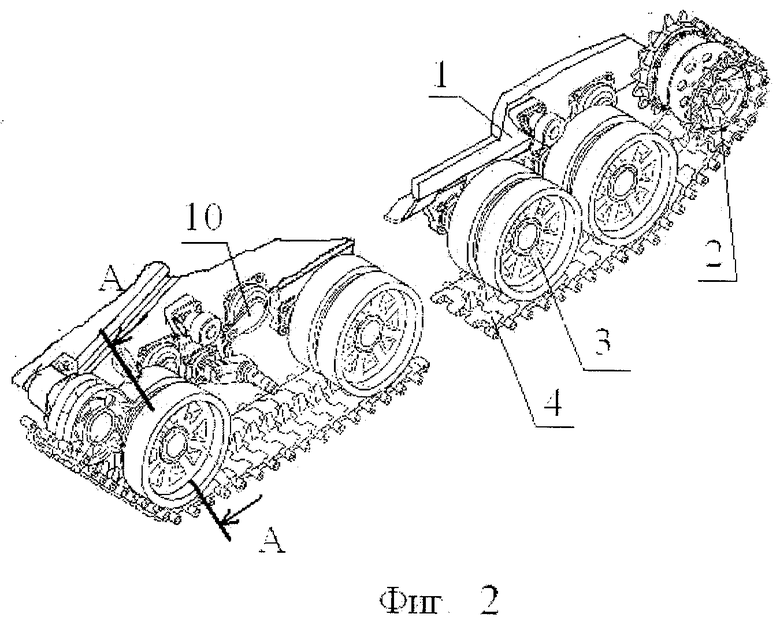
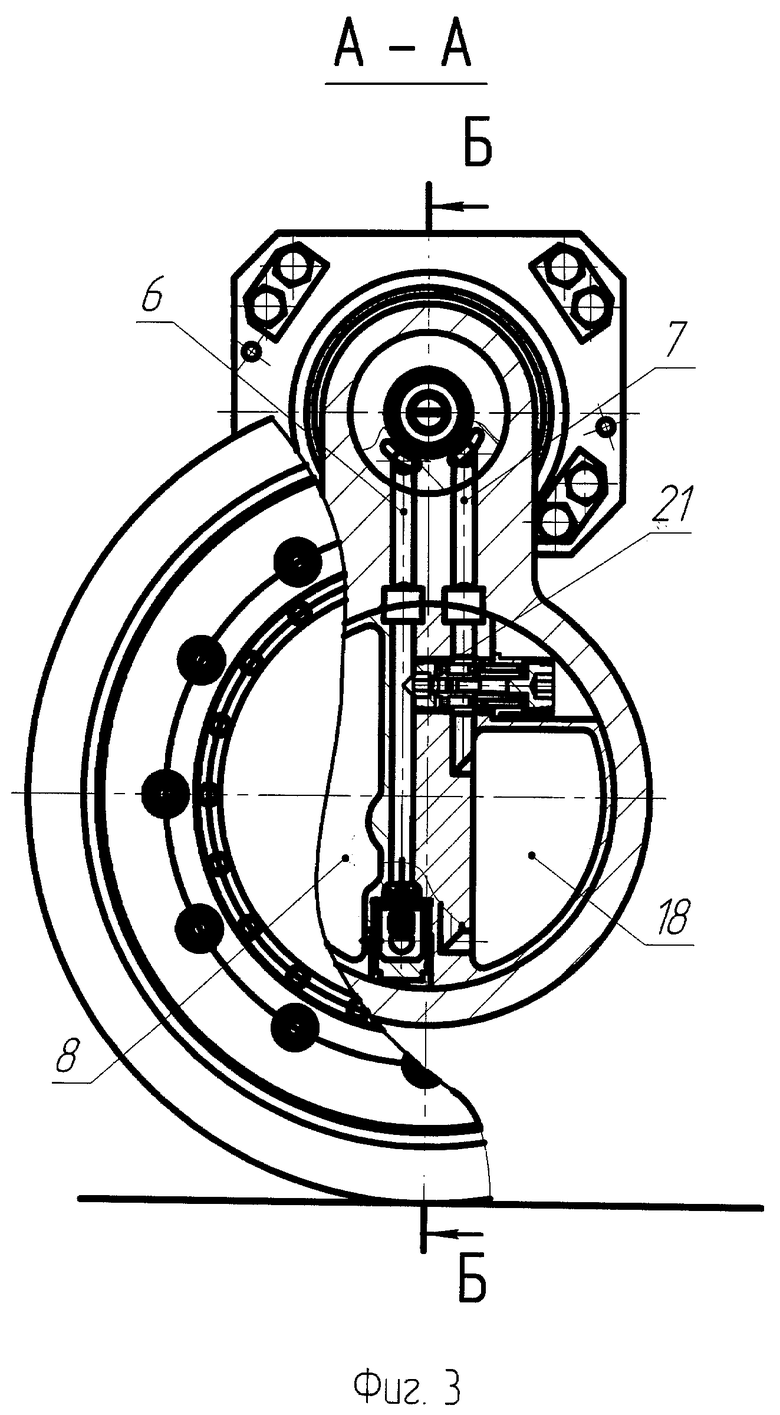
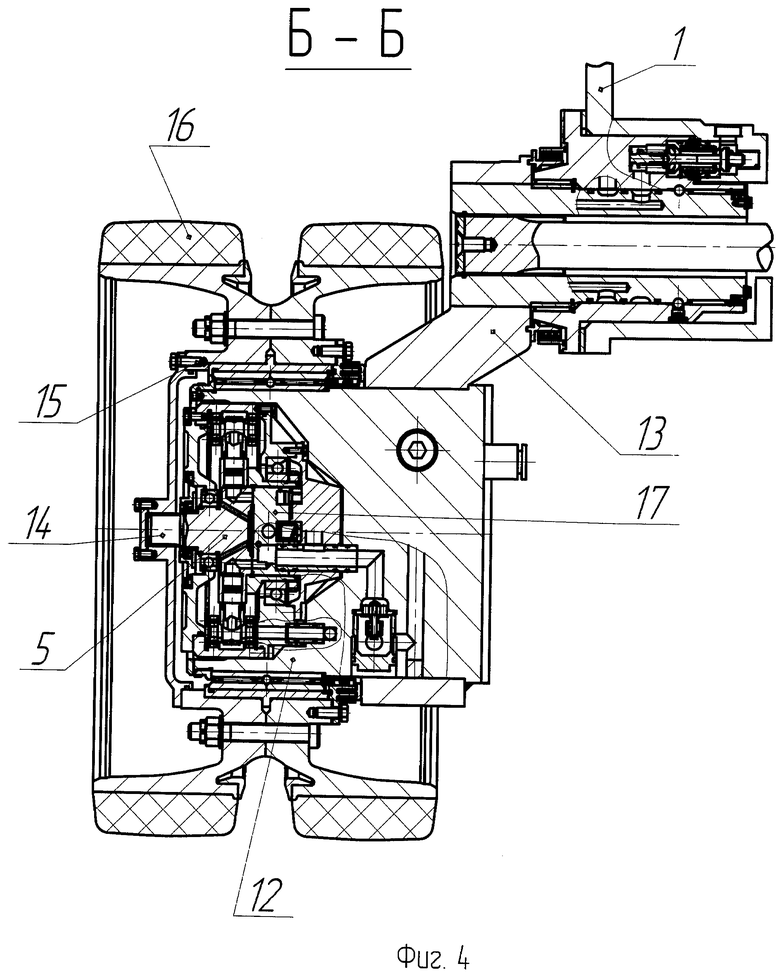
На фиг.1 представлен общий вид гусеничной машины, на фиг.2 показано размещение автономных блоков подвески на гусеничной машине, на фиг.3 и 4 изображена конструкция автономного блока подвески, а на фиг.5 - принципиальная гидравлическая схема подвески.
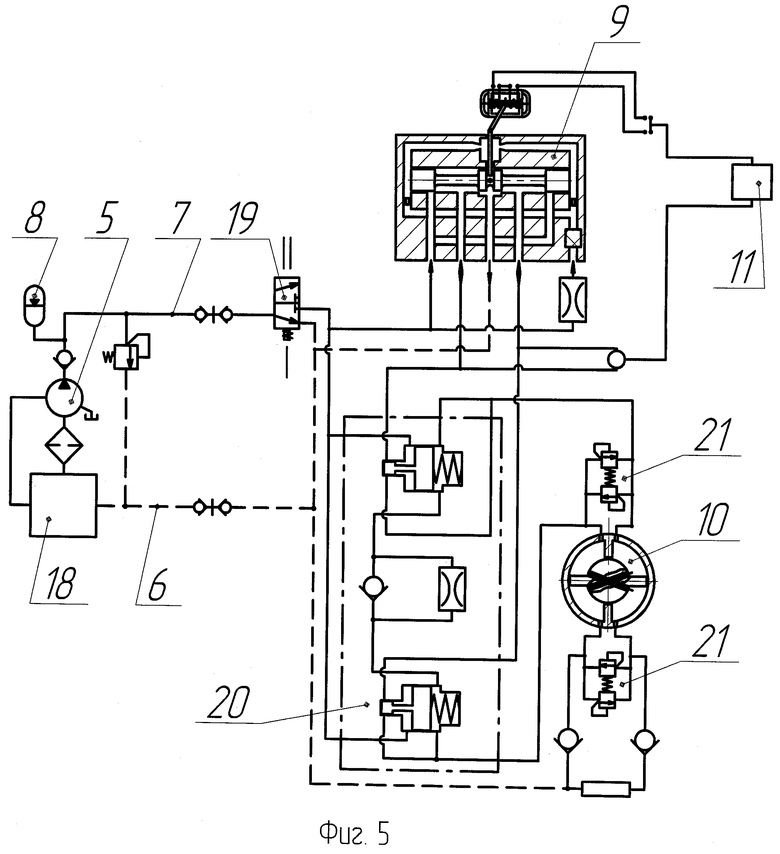
Система стабилизации корпуса 1 гусеничной машины включает ходовую часть с ведущими колесами 2 и опорными катками 3, взаимодействующими с гусеницами 4, и содержит управляемую гидросистему подрессоривания, снабженную гидравлическим насосом 5, всасывающей 6 и нагнетательной 7 магистралями, пневмогидроаккумулятором 8, гидроусилителем 9, исполнительными механизмами - лопастными гидроцилиндрами 10 и блоком управления 11. Силовая часть системы стабилизации выполнена в виде автономных блоков, установленных внутри опорных катков 3 гусеничной машины, причем каждый из блоков снабжен гидравлическим насосом 5, выполненным радиально-поршневым, корпус которого является массивной осью 12 балансира 13, являющейся опорой катка 3, а вал 14 насоса 5 через ступицу 15 соединен с ободом 16 этого катка 3, при этом упомянутый гидронасос 5 снабжен плоским распределителем 17, который сообщается со встроенными внутри тела балансира 13 всасывающей магистралью 6, соединенной с баком 18, нагнетательной магистралью 7, соединенной с пневмогидроаккумулятором 8, проходящей через двухпозиционный электромагнитный клапан 19 с гидроусилителем 9, блок переключения режимов 20, соединенный со всасывающей магистралью 6, и предохранительные клапаны 21 являются агрегатами распределения и управления системой.
Устройство работает следующим образом. При вращении ведущего колеса 2 двигателем транспортного средства и перемещения гусеницы 4, взаимодействующей с грунтом, возникают силы, перемещающие корпус 1. Балансиры 13, установленные на корпусе 1, тянут опорные катки 3 по гусенице 4. Опорные катки 3, нагруженные весом машины, взаимодействуя с гусеницей 4, вращаются и передают возникающий на них крутящий момент со ступицы 15 на вал 14 встроенного гидравлического насоса 5. Распределитель 17 дает возможность забора жидкости из бака 18 и подачу ее по магистрали 7 к клапану 19.
При выключенном блоке управления 11 клапан 19 находится в позиции I (см. фиг.5), и доступ рабочей жидкости к исполнительному механизму - лопастному гидроцилиндру 10 закрыт, и он работает как лопастной гидравлический амортизатор. При этом насос 5 работает на холостом ходу, прокачивая рабочую жидкость через магистраль 6 в бак 18. Для обеспечения устойчивой работы насоса 5 давление в магистрали 6 и баке 18 поддерживает необходимый уровень подпора.
При переключении блоком управления 11 клапана 19 в позицию II, блок переключения режимов 20 обеспечивает работу исполнительного механизма 10 в режиме моментного гидроцилиндра, перепад давлений в рабочих полостях которого формируется за счет гидроусилителя 9, на вход которого подается электрический сигнал в соответствии с заданным законом управления, обеспечивающим стабилизацию корпуса при движении по неровностям дороги. При этом насос 5 обеспечивает подачу рабочей жидкости в гидропневмоаккумулятор 8 до давления, определяемого предохранительным клапаном гидросистемы.
Заявителем изготовлен опытный образец устройства, который подтвердил его работоспособность.
Источники информации
1. Авторское свидетельство №500992. Способ стабилизации динамических сил ТС.
2. Заявка РФ №2003103501. Автоматическое устройство регулирования сил сопротивления амортизатора.
3. Патент США №2965390. Управляемая система подрессоривания.
4. Патент РФ №2041080. Способ демпфирования колебаний многоопорного транспортного средства и его система подрессоривания (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2548823C2 |
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ МНОГООПОРНОГО ТРАНСПОРТНОГО СРЕДСТВА И ЕГО СИСТЕМА ПОДРЕССОРИВАНИЯ | 1993 |
|
RU2041080C1 |
| Сменный гусеничный движитель колесного транспортного средства | 2017 |
|
RU2652282C1 |
| Способ и система управления демпфирующими свойствами системы подрессоривания танка | 2024 |
|
RU2826323C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПНЕВМО-ТОРСИОННОЙ ПОДВЕСКИ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2537928C1 |
| УНИВЕРСАЛЬНОЕ ГУСЕНИЧНОЕ ШАССИ НА ЕДИНОЙ ПЛАТФОРМЕ | 2009 |
|
RU2433934C2 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2002 |
|
RU2268839C9 |
| САМОХОДНАЯ АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 1999 |
|
RU2169337C2 |
| Тяговый гусеничный модуль с изменяемой площадью контакта для колесного трактора | 2023 |
|
RU2835909C1 |
| САМОДВИЖУЩАЯСЯ ПЛАТФОРМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2015 |
|
RU2583254C1 |
Изобретение относится к подрессориванию транспортных средств. Система стабилизации корпуса гусеничной машины включает ходовую часть с ведущими колесами и опорными катками, управляемую гидросистему, гидравлический насос, всасывающую и нагнетательную магистрали, пневмогидроаккумулятор, гидроусилитель, исполнительные механизмы и блок управления. Силовая часть системы выполнена в виде автономных блоков, установленных внутри опорных катков гусеничной машины и снабженных гидравлическим радиально-поршневым насосом. Насос своим корпусом встроен внутрь массивной оси балансира, являющейся опорой катка. Вал насоса через ступицу соединен с ободом катка. Гидронасос снабжен плоским распределителем, сообщающимся со встроенными внутри тела балансира всасывающей магистралью, соединенной с баком, и нагнетающей магистралью, соединенной с пневмогидроаккумулятором и исполнительным механизмом. Нагнетающая магистраль проходит через двухпозиционный электромагнитный клапан с гидроусилителем, блок переключения режимов, соединенный с гидравлической магистралью, и предохранительные клапаны. Клапаны являются агрегатами распределения и управления системой. Исполнительный механизм выполнен в виде управляемого моментного гидроцилиндра, корпус которого размещен в корпусе транспортного средства. Способ стабилизации корпуса заключается в создании стабилизирующих усилий, воздействующих на корпус со стороны подвески при движении. Энергию для создания стабилизирующих усилий получают за счет кинетической энергии вращения опорных катков при взаимодействии их с гусеницами транспортного средства. Превращают ее в потенциальную энергию давления рабочей жидкости. Затем аккумулируют и расходуют в исполнительных механизмах системы подрессоривания. Достигается повышение стабилизирующих свойств и улучшение компоновочных решений. 2 н.п. ф-лы, 5 ил.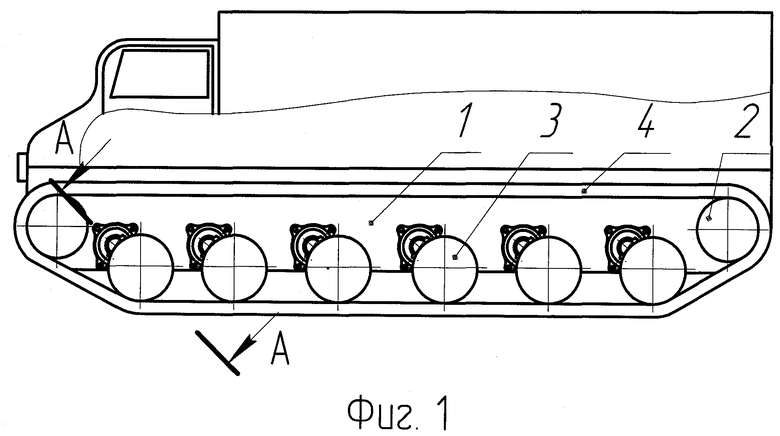
1. Способ стабилизации корпуса гусеничного транспортного средства с управляемой системой подрессоривания, заключающийся в создании стабилизирующих усилий, воздействующих на корпус со стороны подвески при движении транспортного средства по неровностям,
отличающийся тем, что энергию для создания стабилизирующих усилий получают за счет кинетической энергии вращения опорных катков при взаимодействии их с гусеницами транспортного средства при движении последнего, превращают ее в потенциальную энергию давления рабочей жидкости, полученную энергию аккумулируют, а затем расходуют в исполнительных механизмах системы подрессоривания, обеспечивающих стабилизацию корпуса.
2. Система стабилизации корпуса гусеничной машины, включающей ходовую часть с ведущими колесами и опорными катками, взаимодействующими с гусеницами, содержащая управляемую гидросистему подрессоривания, снабженную гидравлическим насосом, всасывающей и нагнетательной магистралями, пневмогидроаккумулятором, гидроусилителем, исполнительными механизмами и блоком управления,
отличающаяся тем, что ее силовая часть выполнена в виде автономных блоков, установленных внутри опорных катков гусеничной машины, причем каждый из блоков снабжен гидравлическим радиально-поршневым насосом, который своим корпусом встроен внутрь массивной оси балансира, являющейся опорой катка, а вал насоса через ступицу соединен с ободом этого катка, при этом упомянутый гидронасос снабжен плоским распределителем, который сообщается со встроенными внутри тела балансира всасывающей магистралью, соединенной с баком, нагнетающей магистралью, соединенной с пневмогидроаккумулятором, проходящей через двухпозиционный электромагнитный клапан с гидроусилителем, блок переключения режимов, соединенный с гидравлической магистралью, и предохранительные клапаны, являющиеся агрегатами распределения и управления системой, и соединенной с исполнительным механизмом, выполненным в виде управляемого моментного гидроцилиндра, корпус которого размещен в корпусе транспортного средства.
| Система автоматической стабилизации положения остова крутосклонного транспортного средства | 1988 |
|
SU1521616A1 |
| СПОСОБ ЗАКРЫТИЯ КУЛЬТИ ДВЕНАДЦАТИПЕРСТНОЙ КИШКИ ПРИ РЕЗЕКЦИИ ЖЕЛУДКА ПО ПОВОДУ ПОСЛЕЛУКОВИЧНОЙ ПЕНЕТРИРУЮЩЕЙ ЯЗВЫ ЗАДНЕЙ СТЕНКИ | 1991 |
|
RU2022527C1 |
| Гидравлический стабилизатор крутосклонного транспортного средства | 1979 |
|
SU787191A1 |
| US 7248956 B2, 24.07.2007. | |||

