Изобретение относится к устройствам для выправки железнодорожного пути.
Известна машина для выправки уложенного на бетонное основание железнодорожного пути, содержащая опирающуюся на ходовые тележки раму, смонтированные на ней подъемно-рихтовочный агрегат и домкрат для опирания рамы на основание пути, установленный в зоне указанного агрегата (патент ГДР N 53086, кл. Е 01 В 27/17, 1967).
Техническим результатом изобретения является обеспечение точной установки пути в заданное положение.
Для достижения этого технического результата машина для выправки уложенного на бетонное основание железнодорожного пути, содержащая опирающуюся на ходовые тележки раму, смонтированные на ней подъемно-рихтовочный агрегат и домкрат для опирания рамы на основание пути, установленный в зоне указанного агрегата, снабжена установленным в зоне подъемно-рихтовочного агрегата дополнительным домкратом для опирания рамы на основание пути, подъемно-рихтовочный агрегат смонтирован за задней по направлению работы машины ходовой тележкой, которая установлена с возможностью перестановки в направлении переднего конца машины, а указанные домкрат и дополнительный домкрат поперек машины.
Кроме этого машина снабжена двумя установленными на заднем по направлению работы машины конце рамы с возможностью перестановки по высоте приводами роликами для опирания рамы на рельсы пути, которые выполнены двухребордными и установлены при помощи рычагов, шарнирно закрепленных на раме с возможностью поворота приводами вокруг вертикальных и горизонтальных осей, а между рычагами на раме смонтированы сиденье оператора и блок управления приводами. Машина также снабжена измерительной тележкой, опирающейся на ролики с ребордой, установленной на раме сзади подъемно-рихтовочного агрегата по направлению работы машины с возможностью перестановки по высоте приводом и несущий рефлектор для отражения реперного светового луча, а на заднем торце рамы установлен дополнительный рефлектор для отражения реперного светового луча, при этом на раме и измерительной тележке установлены с возможностью поворота вокруг горизонтальных осей приводами заслонки для закрытия указанных рефлекторов, а на раме между ней и измерительной тележкой смонтированы датчик положения пути в продольном профиле и датчик положения пути в плане.
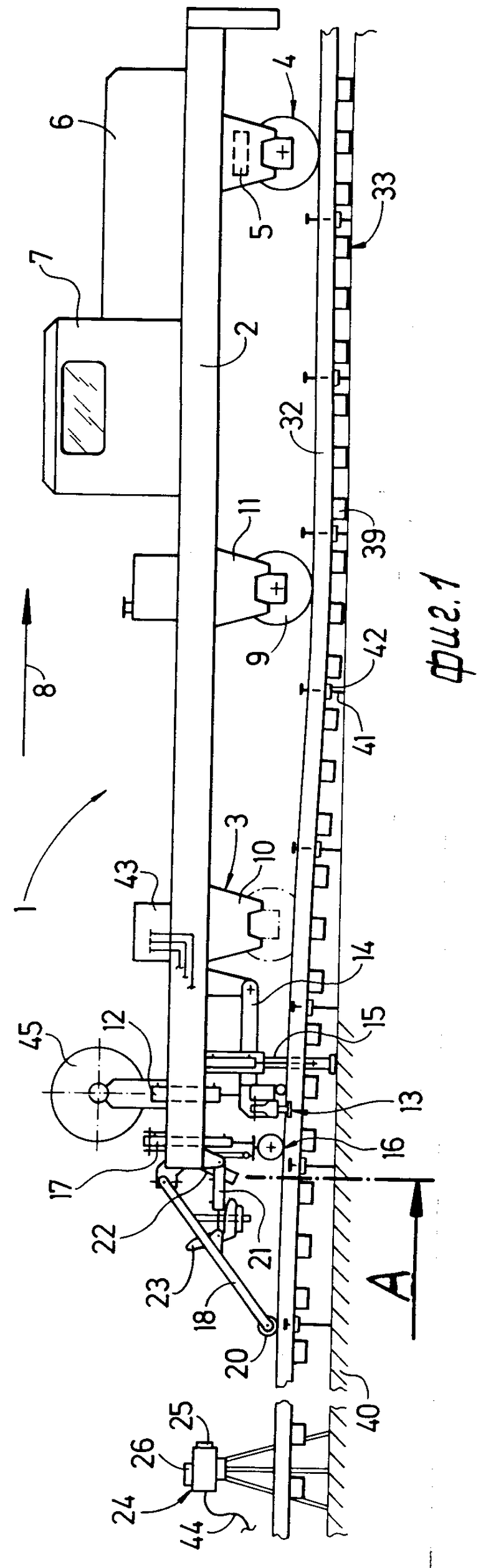
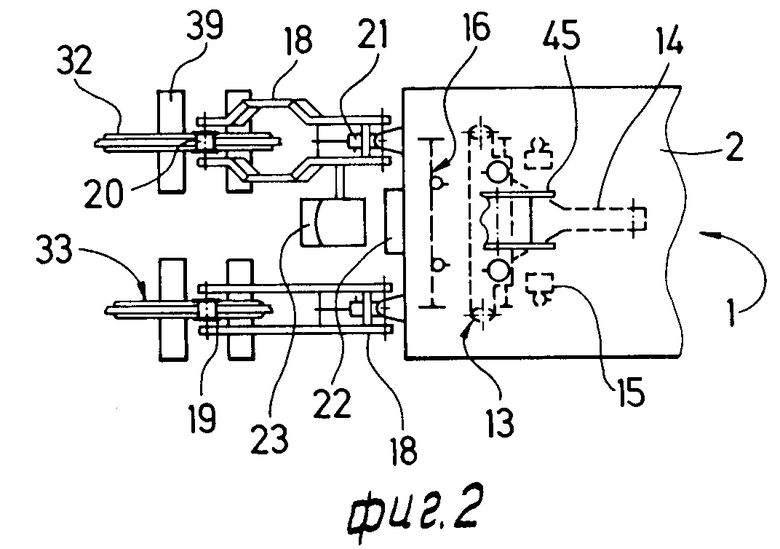
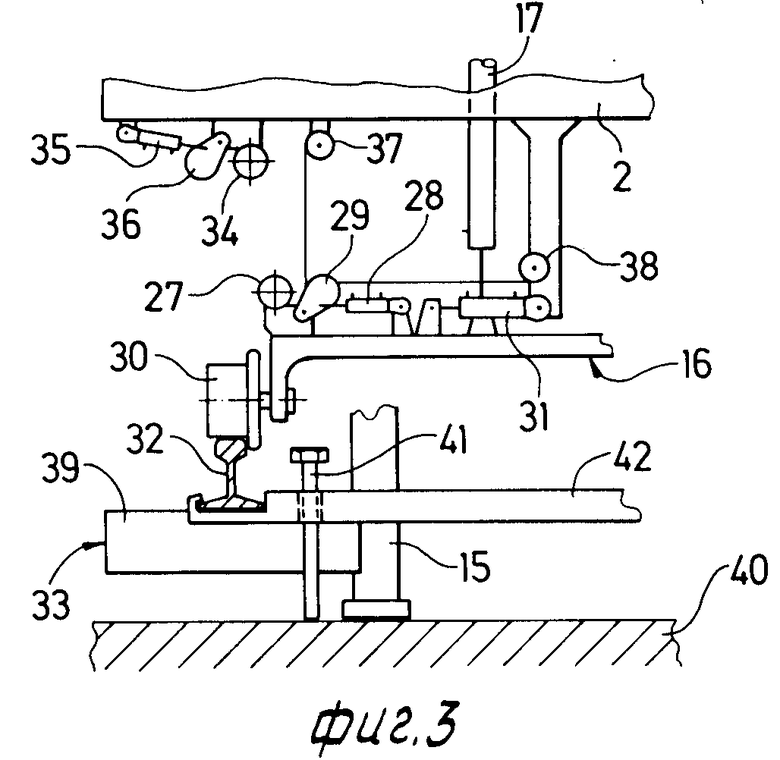
На фиг.1 изображена машина для выправки уложенного на бетонное основание железнодорожного пути, общий вид; на фиг.2 вид сверху на заднюю концевую часть машины; на фиг.3 вид по стрелке А на фиг.1.
Машина 1 (фиг.1) состоит из рамы 2, опирающейся на ходовые тележки 3 и 4, ходового привода 5, мотора 6 и кабины 7 водителя. Задняя, если смотреть по направлению работы, показанному стрелкой А, ходовая тележка 3 имеет колесную пару 9, которую можно передвигать от задней к средним колесным опорам 10 или 11.
В области заднего конца машины находится приводимый приводами 12 перемещаемый по высоте и в боковом направлении подъемно-рихтовочный агрегат 13 с накладываемыми с наружной стороны рельсов подъемными роликами. Этот подъемно-рихтовочный агрегат 13 шарнирно соединен с рамой 2 продольной балкой 14 в области задней тележки 3. Непосредственно перед подъемно-рихтовочным агрегатом 13 установлены на раме два разнесенных поперек машины домкрата 15 для опирания ее на основание пути. Сзади подъемно-рихтовочного агрегата 13 находится измерительная тележка 16, соединенная приводами 17 с рамой 2 с возможностью перестановки в вертикальной плоскости. На заднем торце рамы 2 шарнирно установлены два разнесенные поперек машины рычага 18, каждый из которых может отклоняться как относительно вертикальной, та и горизонтальной осей, перпендикулярных продольной оси машины. Эти рычаги 18 на концах оборудованы опорными роликами 20 с ребордами 19, а также приводом 21 для приложения вертикального усилия, соединенным с рамой 2. Между обоими рычагами 18 находится центральный блок 22 управления и сиденье 23 оператора.
На находящемся позади машины 1 выправленном участке пути находится теодолит 24 с инфракрасным передатчиком или приемником 25 и измерителем 26 расстояния. Теодолит 24 кабелем 44 соединен с катушкой 45 кабеля или компьютером 43 и блоком 22 управления.
Измерительная тележка 16 (фиг.3) оборудована рефлектором 27 для отражения испускаемого инфракрасным передатчиком 25 луча света. Этому рефлектору 27 придана приводимая приводом 28 заслонка 29. Ролики 30 с ребордами на измерительной тележке 16 с помощью распорного привода 31 могут прижиматься в боковом направлении по выбору либо к левому, либо к правому рельсу 32 пути 33. Второй рефлектор 34 с приводимой приводом 35 заслонкой 36 в области измерительной тележки 16 установлен на раме 2. Между измерительной тележкой 16 и рамой 2 расположен первый выполненный в виде потенциометра, приводимого тросом, датчик 37 для определения положения пути в продольном профиле и второй датчик 38 для измерения положения пути в плане. Для ясности эскиза, находящийся перед измерительной тележкой 16 подъемно-рихтовочный агрегат 13 не изображен.
Рельсы 32 пути 33 соединены разнесенными в направлении поперек пути шпалами 39 из бетона. Для удаления пути 33 от основания 40 из бетона в области каждого ряда шпал предусмотрены вертикальные винтовые домкраты 41. Они попарно установлены в поперечных балках 42 с возможностью перестановки по высоте, и балки соединены с возможностью демонтажа с обоими рельсами 32. Множество таких поперечных балок 42 расположено вдоль пути на расстоянии примерно 1,8 м друг от друга.
После доставки на место работы задний конец машины посредством опускания опорных домкратов 15 на основание 40 приподнимают, и колесную пару 9 задней ходовой тележки 3 вынимают из опоры 10 и вводят в среднюю опору 11. Можно однако и всю заднюю ходовую тележку 3 из заднего положения перевести в переднее рабочее положение, показанное сплошными линиями. Параллельно этому устанавливают теодолит 24 и направляют на реперную точку пути. В соединенный с теодолитом 24 компьютер 43 вводят данные заданного положения пути на участке, подлежащем выправке. Выправка пути начинается с того, что каждый подъемный ролик подъемно-рихтовочного агрегата 13 прижимают к внешней поверхности рельсов и измерительная тележка 16 с помощью привода 31 прижимается к левому рельсу 32. Рычаги 18 опускают, чтобы опорные ролики 20 опустились на рельсы 32, и нагружают приводами 21 с силой примерно 800 килопонд на каждый рельс. Оба опорных доскрата 15 опускают до прилегания к основанию 40. Затем с помощью приводов 12 производят частичный подъем пути примерно на 80% полного подъема пути 33 (на фиг.1 подъем пути показан преувеличенным для ясности эскиза).
После этого частичного подъема начинается процесс измерения, при котором инфракрасный передатчик или приемник 25 теодолита 24 автоматически направляется на второй рефлектор 34, посредством измерителя 26 расстояния определяют точное положение рефлектора 34 относительно пути 33, так что посредством компьютера 43 автоматически определяют предписанное для этого участка пути заданное положение и сравнивают с полученным с теодолита 24 фактическим положением пути. Посредством датчиков 37 и 38 определяют положение пути 33 относительно второго рефлектора 34. Первый рефлектор 27 для исключения ошибочного измерения закрыт при этом заслонкой 29. После определения разности проводят второй частичный подъем пути, пока контролируемые датчиками 37, 38 величины перемещений пути не совпадут с предварительно рассчитанными и индицируемыми на блоке управления разностными величинами.
Поднятый теперь в заданное положение путь 33 фиксируют по высоте и в плане с помощью соответствующих подробнее не показанных винтовых домкратов и находящиеся в области подъема пути винтовые домкраты 41 поперечных балок 42 вращают до тех пор, пока они не прилягут к основанию с постоянным устанавливаемым по выбору крутящим моментом. Фиксация пути в поперечном направлении производится посредством не показанных горизонтальных и перпендикулярных продольному направлению пути винтовых домкратов. Добавочно выкручивают винтовые домкраты 41 между подъемно-рихтовочным агрегатом 13 и сдвинутой колесной парой 9, пока путь 33 также и на этом участке не зафиксируется по линии изгиба с опорой на основание 40. Находящиеся перед колесной парой 9 шпалы 39 лежат на основании 40.
По окончании работа с домкратами второй рефлектор 34 закрывают заслонкой, передатчик или приемник 25 инфракрасных лучей автоматически направляется на первый рефлектор 27, с которого предварительно удаляется заслонка 29, и проводят контрольный замер для проверки выправленного пути. Приводы 12 отключают от источника давления и оба опорных домкрата 15 поднимают выше верхнего края шпал 39. Подача вперед машины 1 ходовым приводом 5 заканчивается, когда следующая поперечная балка 42 подойдет к измерительной тележке 16. После опускания обоих опорных домкратов 15 между двумя шпалами 39 на основание 40 повторяют весь описанный выше процесс для осуществления выправки пути.
Вместо описанной здесь измерительной системы, состоящей из теодолита, рефлекторов и датчиков положения пути, возможны другие исполнения опорной системы, например, находящийся на участке выправленного пути лазерный передатчик с находящейся и укрепленной на измерительной тележке матричной камерой с матовым стеклом в качестве приемника.
Использование: при выправке железнодорожного пути. Сущность: машина содержит раму, опирающуюся на ходовые тележки. На раме смонтированы подъемно-рихтовочный агрегат, расположенный за задней по направлению работы машины ходовой тележкой, и два домкрата для опирания рамы на основание пути, разнесенных поперек машины и установленных в зоне указанного агрегата. Задняя ходовая тележка установлена на раме с возможностью перестановки в направлении переднего конца машины. 7 з.п. ф-лы, 3 ил.
| Устройство для автоматического регулирования плотности растворов кислот, щелочей, солей и т.д. | 1936 |
|
SU53086A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

