Изобретение относится к устройствам, используемым при строительстве и ремонте рельсового пути, в частности к устройствам для выправки пути.
Известна машина для выправки рельсового пути, содержащая раму, опирающуюся на ходовые тележки, устройство для определения положения рельсового пути в продольном профиле, включающее в себя перемещаемые по пути измерительные тележки, датчики положения рельсового пути, установленные на соответствующей измерительной тележке, датчики возвышения рельса относительно другого, установленные на передней и задней измерительных тележках, подъемно-рихтовочный агрегат, установленный на раме и включающий в себя приводы для выправки пути в плане, и устройство для определения положения пути в плане, включающее в себя измерительную базу (US, патент N 4655142, кл. E 01 B 29/04, 1987).
Техническим результатом изобретения является повышение качества выправки пути в плане пути использования рамы машины в качестве измерительной базы для повышения точности выправки.
Для достижения этого технического результата машина для выправки рельсового пути, содержащая раму, опирающуюся на ходовые тележки, устройство для определения положения рельсового пути в продольном профиле, включающем в себя перемещаемые по пути измерительные тележки, датчики положения рельсового пути, установленные на соответствующей измерительной тележке, датчики возвышения одного рельса относительно другого, установленные на передней и задней измерительных тележках, подъемно-рихтовочный агрегат, установленный на раме и включающий в себя приводы для выправки в плане, и устройство для определения положения пути в плане, включающее в себя измерительную базу, снабжена датчиками положения рельсового пути в плане, установленными на измерительных тележках и связанными с упомянутой измерительной базой, которая образована рамой машины, и датчиком давления для определения выправочных усилий приводов для выправки пути в плане.
Кроме этого, датчик давления с датчиком положения пути в плане, расположенным вблизи приводов для выправки пути в плане, с возможностью установки в нулевое значение датчика положения пути в плане при достижении максимального давления в приводах для выправки пути в плане, датчики положения рельсового пути в плане связаны с рамой машины при помощи вертикальных кронштейнов и выполнены в виде потенциометров с тросами, соединенными с соответствующей измерительной тележкой, а упомянутые тросы соединены с соответствующей измерительной тележкой на одинаковой высоте от горизонтальной плоскости, проходящей через точки опирания ходовых тележек на рельсы, при этом машина снабжена дополнительными датчиками возвышения одного рельса относительно другого, закрепленными на переднем и заднем концевых участках рамы машины.
На фиг. 1 изображена машина для выправки рельсового пути, общий вид; на фиг.2 разрез А-А фиг.1; на фиг.3 разрез Б-Б на фиг.1; на фиг.4 разрез В-В на фиг. 1; на фиг.5 схематично устройство для определения положения пути в плане, вид сверху; на фиг.6 блок-схема устройства для определения положения пути в плане и продольном профиле и возвышения одного рельса относительно другого.
Изображенная на фиг.1 машина 1 для выправки рельсового пути содержит раму 7, опирающуюся на две ходовые тележки 2 и 3, при помощи которых машина 1 перемещается по рельсовому пути, состоящему из рельсов 4 и 5 и шпал 7. Направление рабочего движения машины 1 обозначено стрелкой 8. В передней части рамы 7 машины расположены энергетическая установка 9, а также ходовой привод 10 машины, приводящий переднюю ходовую тележку 2.
Машина 1 оборудована подъемно-рихтовочным агрегатом 11, который благодаря шарнирному соединению с гидравлическим подъемным приводом 12 может перемещаться по вертикали, а благодаря шарнирному соединению с гидравлическим приводом 13 для выправки пути в плане может перемещаться в сторону. Передний конец агрегата 11 соединяется далее шарнирно с консолью 14 рамы 7 машины. В качестве инструментов для выправки рельсового пути расположены на агрегате 11 два выправочных ребордных ролика 15, а также четыре подъемных ролика 16 для каждого рельса 4 и 5, которые расположены попарно напротив друг друга с наружной и внутренней стороны головки рельса для выполнения захвата по типу роликовых клещей. Машина 1 оборудована далее для каждого рельса подбивочным поднимающимся и опускающимся агрегатом 18, изображенным схематически и соединенным с рамой 7 машины с помощью гидравлического привода 17 для перестановки по высоте. На заднем конце рамы 7 машины находится кабина 19 для обслуживающего персонала, которая имеет пульт 20 управления, предназначенный для управления инструментами, выправляющими рельсовый путь.
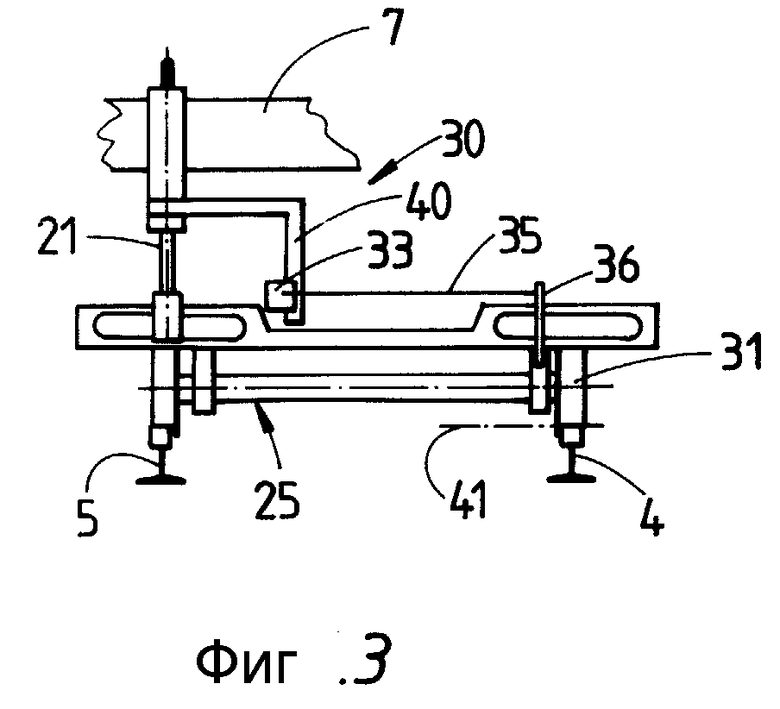
Машина 1 имеет для определения положения рельсового пути в продольном профиле нивелирующую базовую систему 21, которая образована для каждого рельса 4 и 5 нивелирующей базовой прямой 22, образованной натянутой проволокой, передний или заданий конец которой соединяется соответственно с помощью штанги 23 с измерительной тележкой 24 или 26, перемещаемой по невыправленному или выправленному рельсовому пути. Другая перемещаемая по рельсовому пути измерительная тележка 25 располагается между подъемно-рихтовочным агрегатом 11 и подбивочным агрегатом 18. С этой измерительной тележкой 25 соединяется над каждым рельсом датчик 27 положения рельсового пути, который с помощью своего вилкообразного измерительного рычага взаимодействует известным образом с соответствующей нивелирующей базовой прямой 22. Направляемое датчиком 27 положения рельсового пути замеренное значение, которое показывает разницу по высоте в положении рельсового пути в зоне измерительной тележки 25 и попадает к нивелирующей базовой прямой 22, означающей заданный уровень рельсового пути, используется для косвенного или прямого включения подъемного привода 12, который поднимает рельсовый путь с помощью подъемных роликов 16 агрегата 11 до предусмотренного заданного уровня. Как на переднем, так и на заднем конце рамы 7 машины предусматривается соединенный с ней датчик 28 (29) для измерения возвышения одного рельса относительно другого.
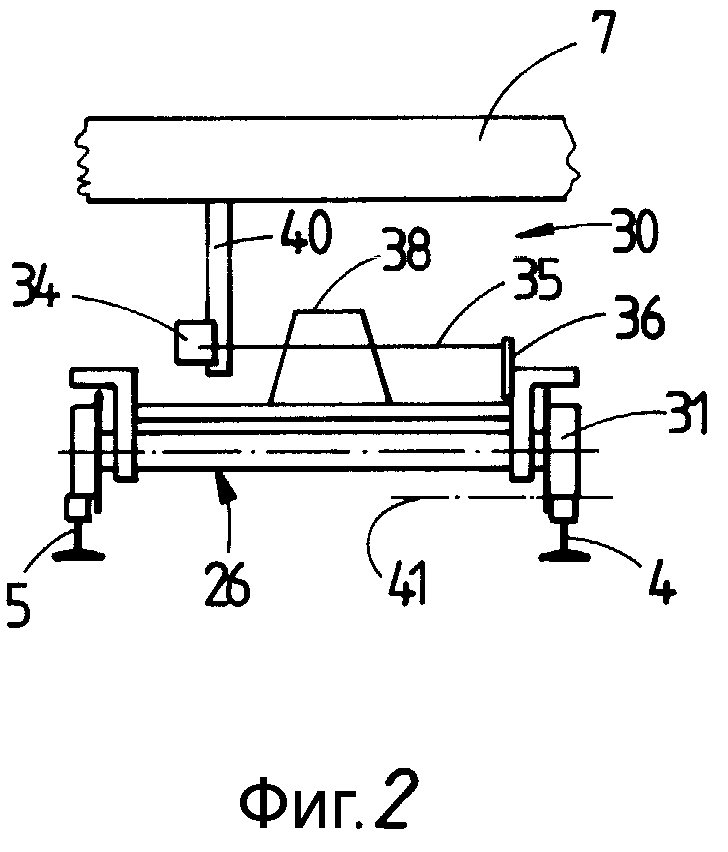
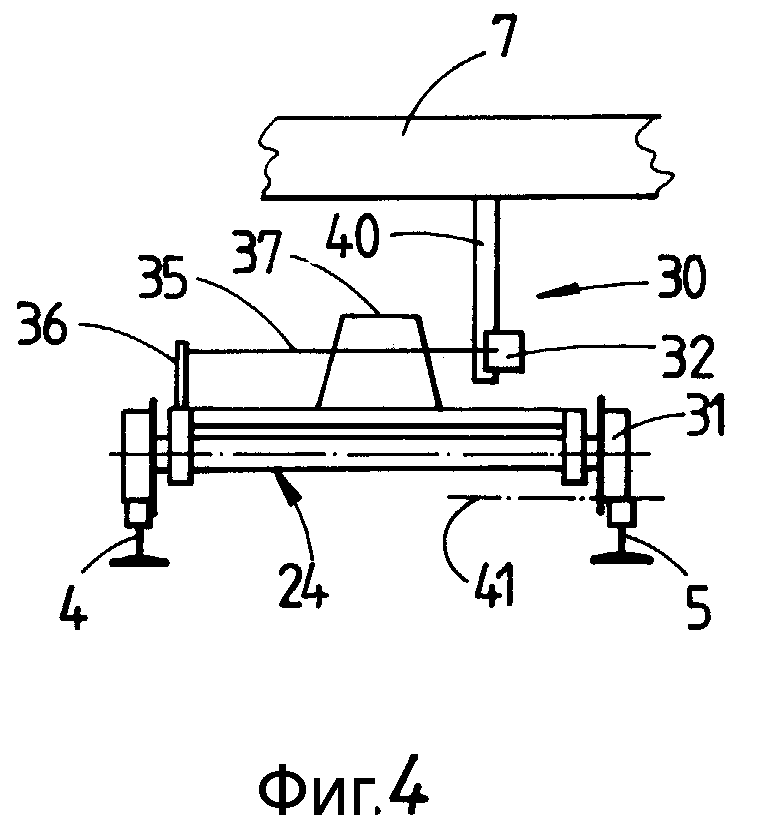
В частности, со ссылкой на фиг. 2 4 описывается другая базовая система 30 для выправки рельсового пути в плане. Эта базовая система 30 состоит в основном из рамы 7 машины, служащей в качестве измерительной базы, из измерительных тележек 24, 25 и 26, перемещающихся соответственно по рельсам 4 и 5 при помощи ребордных роликов 31, и датчиков 32 34 для определения положения рельсового пути в плане. Каждый датчик 32, 33 и 34 для определения положения рельсового пути в плане, соединенный через соответствующий кронштейн 40 непосредственно с рамой 7 машины, выполнен как вращающийся потенциометр, сервоэлемент которого вращается вокруг вертикальной или горизонтальной оси с помощью троса 35 измерительного датчика. Каждый трос 35 измерительного датчика соединяется непосредственно с измерительной тележкой 24, 25 и 26, образуя место соединения 36. Вместо этого потенциометра может применяться, например, также бесконтактное измерительное устройство.
Для передней и задней измерительных тележек 24 и 25 предназначается соответственно измерительный датчик 37 и 38 для измерения возвышения одного рельса рельсового пути относительно другого. Все измерительные тележки с 24 по 26, чтобы исключить зазор в колее, прижимаются к обоим рельсам 4 и 5 (базовые рельсы) известным образом, что не описывается более подробно.
Поскольку тросы 35 датчиков 32, 33 и 34 для определения положения рельсового пути в плане располагаются примерно на расстоянии 420 мм над верхней поверхностью рельсов, то в переходной области или же в области отвода пути на участке дугового изгиба может появляться погрешность до 8 мм в результате бокового отклонения места соединения 36. Эти погрешности бокового отклонения могут устраняться, если поперечный наклон передней и задней измерительных тележек 24 и 26 определяется с помощью измерительных датчиков 37 и 38 для измерения возвышения одного рельса относительно другого и используется для компенсации выправочной величины. Для средней измерительной тележки 25 может также применяться заданная величина возвышения одного рельса относительно другого для нивелирующей базовой системы 21.
Все места соединения 36 тросов 35 измерительных датчиков находятся на одной высоте по отношению к горизонтальной базовой плоскости 41, образованной точками опоры колес ходовых тележек 2 и 3, то есть расположены в плоскости, параллельной базовой плоскости. Тем самым обеспечивается то, что все места соединения 36 получают одинаковое боковое отклонение, когда рама 7 машины получает боковой наклон. Тем самым также и в этом случае исключается погрешность измерения.
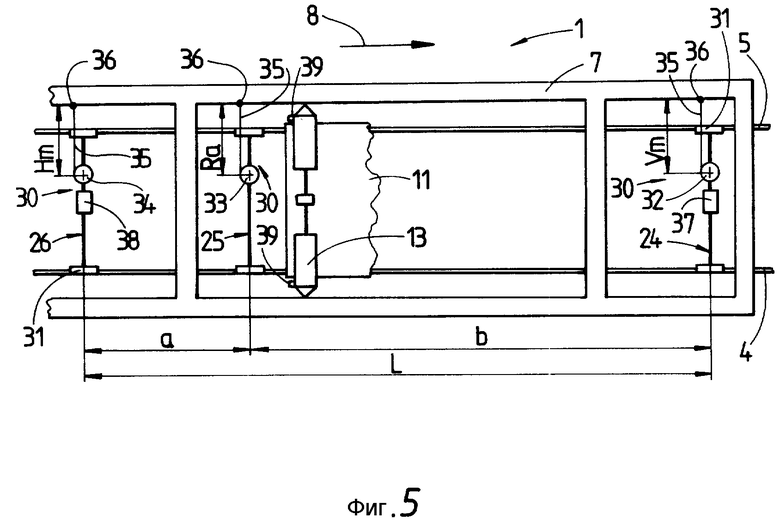
В отличие от конструктивного варианта выполнения машины, показанного на фиг.1-4 при выполнении машины в соответствии с фиг.5 датчики 32, 33 и 34 для определения положения рельсового пути в плане располагаются на соответствующих измерительных тележках 24, 25 и 26, в то время как соответствующие тросы 35 измерительных датчиков соединены с рамой 7 машины. Это однако не оказывает никакого влияния на базовую систему 30 в соответствии с настоящим изобретением. Расстояния соответствующих датчиков 32-34 для определения положения рельсового пути в плане до рамы 7 машины или же до места соединения 36 обозначены как Vm (передняя точка измерения), (Hm (задняя точка измерения) и Ra (выправочное отклонение), L определяет расстояние от передней измерительной тележки 24 до задней измерительной тележки 26. Буквами "а" или же "в" обозначается расстояние от заданной измерительной тележки 26 до средней измерительной тележки или же от передней измерительной тележки 24 до средней измерительной тележки 25. Из этого получается следующее соотношение:
Зависимая от устройства постоянная системы K=B/L.
Средняя замеренная величина Mm= (Hm -Vm)•K + Vm.
Для того случая, когда базовая система 30 находится на точно прямолинейном рельсовом пути (для нулевой компенсации), получается следующее условие:
Необходимая для выполнения выправки рельсового пути выправочная величина (например, величина смещения) RW определяется с помощью следующего уравнения (используя высоту дуги на криволинейных участках рельсового пути):
RW h /(Hm Vm)•K + Vm/ Ra.
Отклонение или параллельное смещение рамы 7 машины не оказывает никакого влияния на результат определения выправочной величины после того, как в основном положении была выполнена нулевая компенсация. При такой нулевой компенсации находятся все измерительные тележки 24 26 на горизонтальной плоскости рельсового пути, при этом рельсы 4 и 5 образуют точно прямую. Все измерительные тележки 24-26, если смотреть в направлении рабочего движения, прижимаются к правому рельсу 4, выправочные приводы управляются без подачи давления. Рельс, например, забетонирован и не может смещаться. С помощью первого юстировочного потенциометра балансируется показание выправочной величины на нулевое значение. После этого левый привод 13 загружается максимальным выправочным усилием. Если происходит отклонение выправочной величины вследствие бокового прогиба рамы 7 машины, то показание величины компенсируется соответственно на нулевое значение с помощью второго юстировочного потенциометра. Выправочные усилия, находящиеся между обоими этими нулевыми значениями, определяются датчиком 39 давления и соответственно компенсируются линейно так, что выправочные величины показываютсяся правильно при автоматической компенсации прогибов рамы 7 машины, зависимых от выправочных усилий. Описанный процесс должен быть повторен для правого выправочного привода 13. Для того случая, когда рама 7 машины имеет очень небольшую жесткость на перекашивание, то перекашивание может определяться измерительными датчиками 37 или 38 для измерения возвышения одного рельса относительно другого, расположенными на концах машины, и аналогично использоваться для компенсации при определении выправочной величины.
Следующие преимущества получаются в результате использования базовой системы 30 в соответствии с настоящим изобретением для рельсового пути.
Благодаря отсутствию стальных или выправочных балок могут беспрепятственно использоваться рабочие инструменты машины 1.
Громоздкие сервомеханизмы для балок в машинах для подбивки стрелочных участков, расположенные на передней и задней измерительных тележках, отсутствуют.
Подбивочные агрегаты могут также безопасно перемещаться в поперечном направлении за осевую линию рельсового пути.
Базовая система 30 может монтироваться с использованием хорошо себя зарекомендовавших обычных механических и электрических элементов. Используются простые подвижные датчики для определения замеряемых величин.
Исключается погрешность измерения, обусловленная прохождением стальной балки по отводам путей и по дугам рельсовых путей.
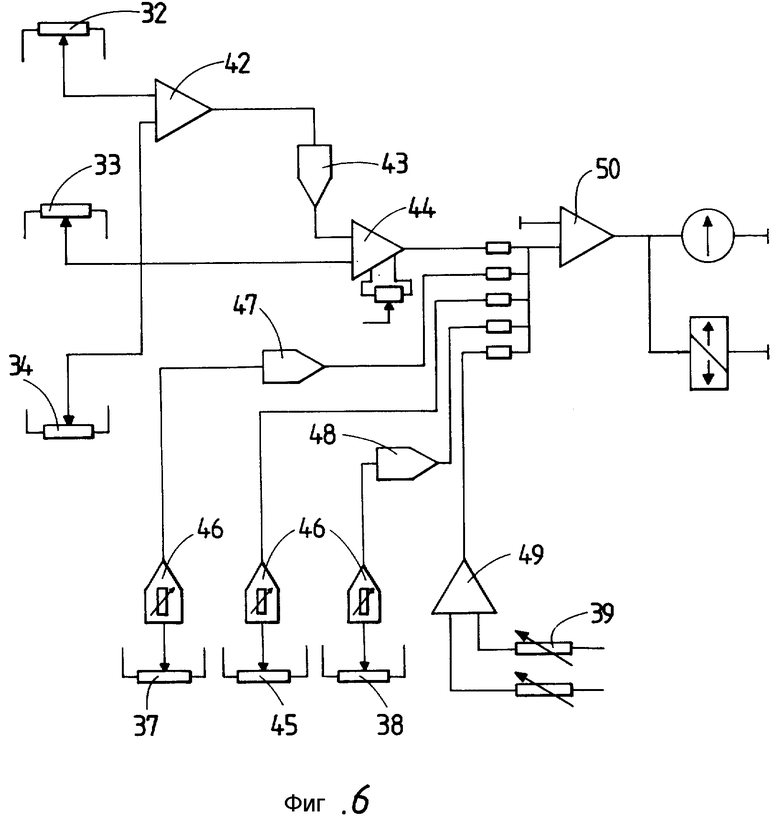
Как можно увидеть на фиг.6, образуется в дифференциальном элементе 42 разница между передним 32 и задним 34 датчиками положения рельсового пути в плане (Hm Vm). В согласующем элементе 43 происходит умножение дифференциальной величины на постоянный коэффициент K системы. В другом дифференциальном элементе 44, который также настроен для юстировки общей нулевой величины, происходит образование разницы выправочного отклонения Pa, определенной с помощью среднего датчика 33 положения рельсового пути в плане. Параллельно с этим определяется с помощью измерительных датчиков 37 и 38 или же другого измерительного устройства 45 (которое предназначается для базовой системы 21) соответствующий поперечный наклон измерительных тележек 24, 25 и 26. В расположенных последовательно согласующих элементах 46 происходит соответствующее влияние на замеряемую величину в соответствии с боковым отклонением места соединения 36, обусловленным конструктивными особенностями в зависимости от поперечного наклона. В других согласующих элементах 47 и 48 происходит влияние на замеряемую величину согласно фактору a/L или же b/L, обусловленному конструктивными особенностями. В другом дифференциальном элементе 49 происходит определение выправочного усилия, например, в результате разницы давлений. Наконец в другом дифференциальном элементе 50 суммируются и компенсируются замеряемые величины и направляются в гидравлический серво-контур для выполнения необходимой выправки рельсового пути при включении соответствующего привода 13. Параллельно с этим происходит показание соответствующей выправочной величины.
Вместо подбивочного агрегата 18 может применяться также известный стабилизирующий агрегат как устройство для выправки рельсового пути.
Использование: при строительстве и ремонте рельсового пути для его выправки. Сущность изобретения: машина содержит раму, опирающуюся на ходовые тележки, установленные на раме подъемно-рихтовочный агрегат с приводом для выправки пути в плане, устройство для определения положения рельсового пути в продольном профиле, которое состоит из перемещаемых по пути измерительных тележек и установленных на соответствующей измерительной тележке датчиков положения рельсового пути, устройство для определения положения пути в плане, которое состоит из датчиков положения пути в плане, установленных на измерительных тележках и связанных с измерительной базой, которая образована рамой машины. Машина также содержит датчики возвышения одного рельса относительно другого и датчик давления для определения выправочных усилий приводов для выправки пути в плане. 4 з.п. ф-лы, 6 ил.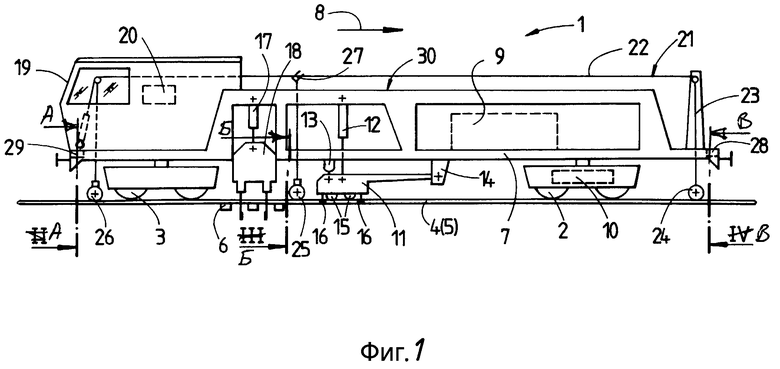
| US, патент, 4655142, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

