Изобретение относится к устройствам для строительства и ремонта железнодорожного пути, в частности к устройствам для уплотнения балласта пути.
Известна непрерывно перемещающаяся машина для уплотнения щебеночного балласта железнодорожного пути, содержащая опирающуюся на ходовые тележки раму, смонтированные на раме привод перемещения машины, по меньшей мере, один агрегат для стабилизации пути, установленный на раме с возможностью перестановки по высоте приводом и включающий в себя вибраторы, установленные на тележке с прижимаемыми приводом к внутренним сторонам рельсов катками с ребордами и вертикальными вращающимися роликами для взаимодействия с внешними сторонами рельсов, и приводы выправки пути в плане, систему измерения положения пути в плане, включающую в себя измерительную базу и датчик положения пути в плане [1]
Техническим результатом изобретения является повышение точности выправки пути в процессе уплотнения балласта.
Для достижения этого результата непрерывно перемещающаяся машина для уплотнения щебеночного балласта железнодорожного пути, содержащая опирающуюся на ходовые тележки раму, смонтированные на раме привод перемещения машины, по меньшей мере один агрегат для стабилизации пути, установленный на раме с возможностью перестановки по высоте приводом и включающий в себя вибраторы, установленные на тележке с прижимаемыми приводом к внутренним сторонам рельсов катками с ребордами и вертикальными вращающимися роликами для взаимодействия с внешними сторонами рельсов, и приводы выправки пути в плане, систему измерения положения пути в плане, включающую в себя измерительную базу и датчик положения пути в плане, снабжена подключенным к указанному датчику электронным фильтром для отделения воздействующих на сигнал колебаний и измерительной тележкой, смонтированной на раме в зоне агрегата для стабилизации пути, а датчик положения пути в плане закреплен при помощи эластичной прокладки на оси измерительной тележки или на раме машины.
Кроме этого, система измерения положения пути в плане снабжена дополнительной измерительной тележкой, смонтированной на раме между задним концом измерительной базы по направлению работы машины и измерительной тележкой и дополнительным датчиком положения пути в плане, закрепленным на оси дополнительной измерительной тележки при помощи эластичной прокладки, а измерительная база образована рамой машины или натянутым тросом, при этом датчик положения пути в плане представляет собой оптоэлектронный сенсор для измерения положения одного из рельсов пути или светодиода, образующего измерительную базу, причем указанный сенсор закреплен на раме, а светодиод на оси измерительной тележки, датчик положения пути в плане состоит из закрепленных на раме с обеих сторон от ее продольной плоскости симметрии двух конденсаторных пластин и третьей конденсаторной пластины, закрепленной на оси измерительной тележки и расположенной в зоне продольной плоскости симметрии машины, причем машина содержит два разнесенных вдоль рамы агрегата для стабилизации пути, соединенных с рамой через приводы выправки пути в плане, а измерительная тележка смонтирована между этими агрегатами.
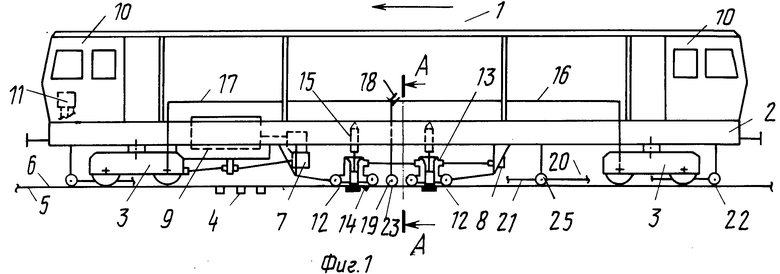
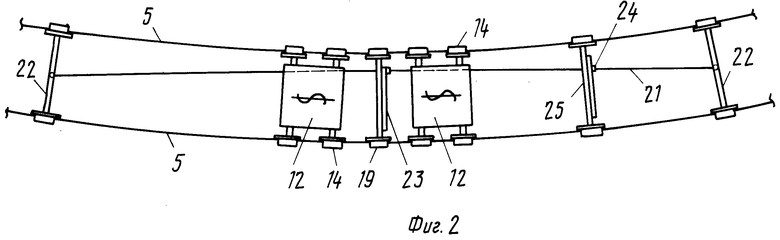
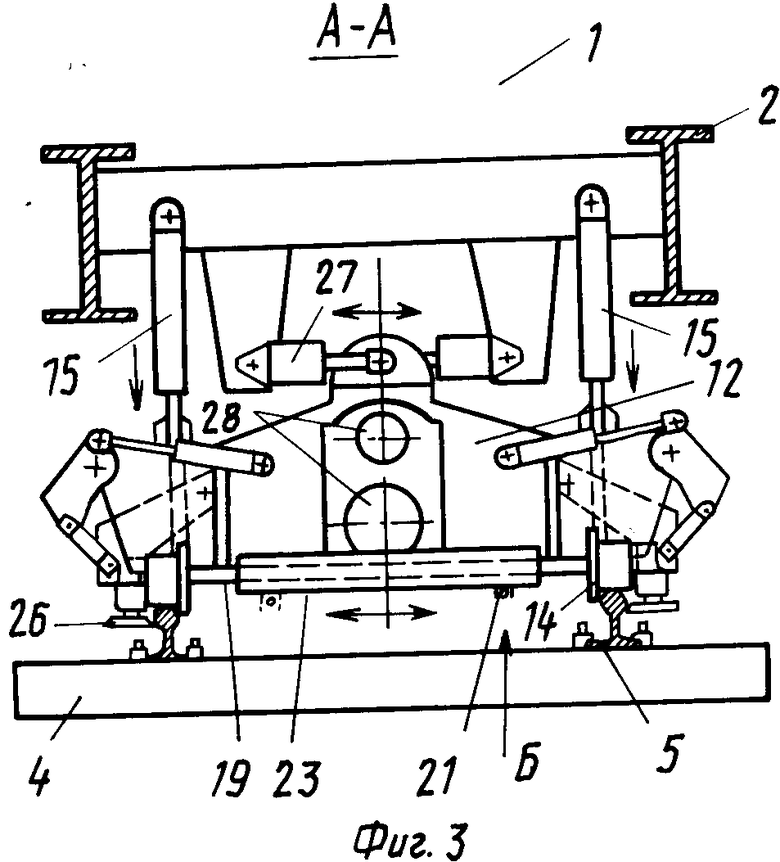
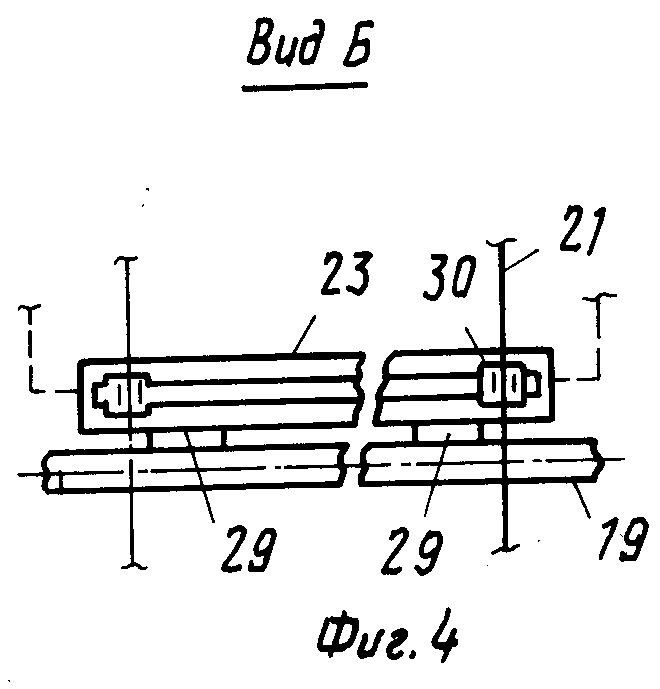
На фиг. 1 изображена непрерывно перемещающаяся машина для уплотнения щебеночного балласта железнодорожного пути, общий вид; на фиг.2 система измерения положения пути в плане и агрегаты для стабилизации пути, вид сверху; на фиг.3 разрез по А-А на фиг.1; на фиг.4 вид по стрелке Б на фиг.3; на фиг.5-7 варианты выполнения системы измерения положения пути в плане.
Представленная на фиг.1 и в целом обозначаемая как стабилизатор пути непрерывно перемещающаяся машина 1 для уплотнения балласта имеет прочно рассчитанную раму 2, которая своими концами через поворотные ходовые тележки 3 опирается на состоящий из шпал 4 и рельсов 5 путь 6. Обеспечение энергией движущего привода, вибропривода 8 и различных других приводов осуществляется центральной энергоустановкой 9. На переднем и заднем концах машины 1 расположены на подрессоренной раме звукоизолированные кабины 10. Для управления различными приводами и обработки различных измерительных сигналов предусмотрен центральный управляюще-вычислительно-записывающий блок 11. Между обеими тележками 3 расположены два установленных на тележках агрегата 12 для стабилизации пути с прижимаемым с помощью раcпорных приводов к внутренней cтороне рельcов c подвергающимcя c помощью вибраторов 13 горизонтальным колебаниям вращающимся каткам 14 с ребордой. Для наложения статической нагрузки на агрегаты 12 предусмотрены два вертикальных, шарнирно связанных с рамой 2 гидравлических привода 15.
Система 16 измерения положения пути в продольном профиле с натянутыми тросами 17 и датчиками 18 положения пути по высоте служит вместе с катящейся по пути 6 измерительной тележкой 19 для контролируемого управления понижением пути. Для контроля за положением пути в плане предусмотрена система 20 измерения положения пути в плане с выполненной в виде натянутого троса измерительной базой 21.
Как, в частности, видно на фиг.1, 2, трос базы 21 натянут между двумя катящимися на ребордных колесах по пути 6 натяжителями 22. Между обоими агрегатами 12 предусмотрен связанный с осью измерительной тележки 19 и предназначенный для измерения поперечных сдвигов пути 6 относительно измерительной базы 21 датчик 23 положения пути в плане. Между этим первым датчиком 23 и задним по направлению движения машины 1 концом измерительной базы 21 расположен второй подобный датчик 24, закрепленный на оси дополнительной измерительной тележки 25.
Как видно из фиг.3, агрегаты 12 опираются на катки 14 с ребордой и имеют прижимаемые к внешней стороне рельсов вертикальные вращающиеся ролики 26. В дополнение к вертикальным приводам 15 для наложения статической нагрузки имеются еще шарнирно укрепленные между рамой 2 и агрегатами 12 и действующие в горизонтальном поперечном оси симметрии машины направлении приводы 27. Поперечные горизонтальные колебания агрегатов 12 возбуждаются выполненными в виде несбалансированных масс вибраторами 28.
Как, в частности, видно из фиг.3, 4, датчики 23 и 24 выполнены в виде линейного или цифрового датчика перемещений и укреплены через эластичную прокладку 29 на оси измерительных тележек 19. Расположенный в датчике 23 поперечно перемещающийся скользящий контакт 30 связан с базой 21 таким образом, что любое поперечное перемещение ее относительно находящегося посредством оси измерительных тележек 19 в кинематическом контакте с путем 6 датчика 23 без люфта передается на скользящий контакт 30. В зависимости от положения этого контакта измеряется различное напряжение, которое позволяет получить точное значение величины поперечного смещения. К датчику 23 подключен электронный фильтр, с помощью которого отделяются обусловленные колебаниями пути 6 мешающие колебания сигнала. Во время рабочего применения при непрерывном поезде машины 1 путь 6 подвергается с помощью обоих синхронизированных агрегатов 12 горизонтальным поперечным колебаниям. Посредством четырех вертикальных приводов 15 полотно автоматически нагружается необходимой для желаемого понижения нагрузкой. При такой динамической стабилизации, благодаря комбинации горизонтальной вибрации и статической вертикальной нагрузке, непосредственно после ремонтных работ контролируемо предупреждается неизбежное начальное понижение пути. С помощью соответствующего изобретения исполнения впервые появляется возможность комбинировать это контролируемое понижение пути с устранением отклонений в положении пути в плане. При этом возможно также независимое от подбивочной машины применение лишь как выравнивающей машины. Как только с помощью системы 20 измерения положения пути с измерительными датчиками 23 и 24 будут установлены отклонения положении пути в плане, происходит соответствующее запитывание гидравлических выравнивающих приводов 27 и тем самым поперечное перемещение агрегатов 12 вместе с находящимся с ними в кинематической связи путем 6, пока измеренное датчиками 23 и 24 фактическое положение пути не совпадет с требуемым положением. Особое преимущество этой выправочной системы заключается в том, что необходимые для выправки силы за счет "плавающего" состояния пути относительно малы. Кроме того, снижаются имеющиеся в пути напряжения и напряжения, обычно возникающие при выправке, и достигается стабилизированное положение пути в плане.
В одном весьма целесообразном варианте использования машины фактическое положение пути записывается перед рабочей поездкой в рамках отдельной измерительной поездки машины 1 с помощью натянутой базы 21 и обеих измерительных тележек с датчиками 23 и 24. Затем с помощью известной компьютерной программы вычисляется оптимальное положение пути. Из результатов сравнения оптимизированного заданного положения пути в плане и измеренного датчиками 23 и 24 фактического его положения рассчитываются необходимые величины сдвижки пути. В последующей рабочей поездке машины 1 выравнивающие приводы 27 запитываются в соответствии с рассчитанными значениями величин. Получающиеся в результате фактические сдвижки пути постоянно измеряются датчиком 23 и сравниваются с расчетными величинами сдвижек. С помощью гидравлического сервоклапана выравнивающие приводы 27 управляются таким образом, чтобы разницу между фактическим и заданным положением пути свести к нулю. Для демпфирования колебаний базы 21 целесообразно осуществлять ее натяжение с помощью двух, с каждого конца, направленных под углом к тросу, пружин. Демпфирующий эффект можно еще более повысить размещением в зоне между концом троса и пружинами дополнительной массы в виде свинцового шара и т.п.
Другая возможность при известной заданной геометрии пути состоит в расчете требуемых стрел изгиба пути и корректирующих значений с помощью компьютера, исходя из заданных геометрических данных и их выдачи на трех или четырехточечную систему 20 измерения положения пути в плане.
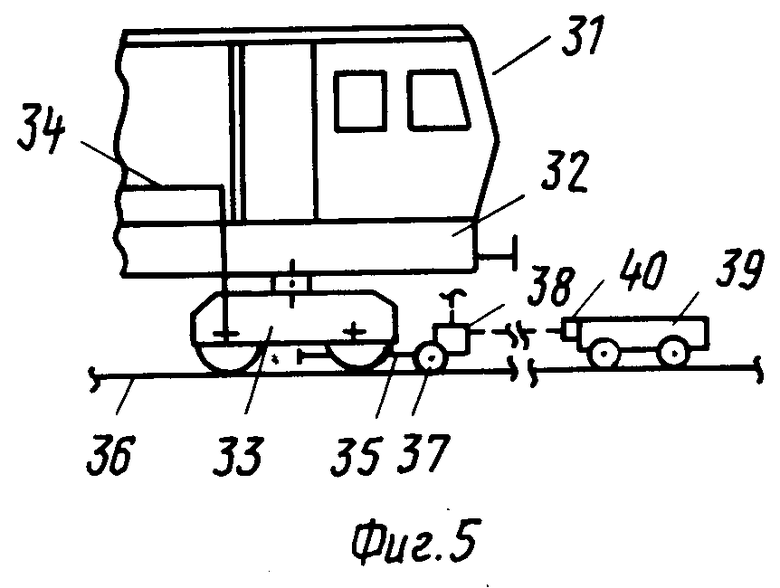
Показанная на фиг. 5 лишь частично выполненная как стабилизатор пути машина 31 с рамой 32 и поворотными ходовыми тележками 33 снабжена нивелировочной и выравнивающей системами 34 и 35 измерения. На передней по направлению движения машины, связанной с натянутым тросом выравнивающей системы 35, и катящейся по пути 36 натяжной тележке 37 размещено лазерное приемное устройство 38. На независимо от машины 31 движущейся по пути 36 тележке 39 находится лазерный излучатель 40. Таким образом создается возможность направить принадлежащую машине выравнивающую систему 35 вдоль задаваемой лазерным излучателем 40 линии. Съем поперечных смещений пути происходит также с помощью описанных на фиг.1-4 и взаимодействующих с натянутым тpосом систем измерения.
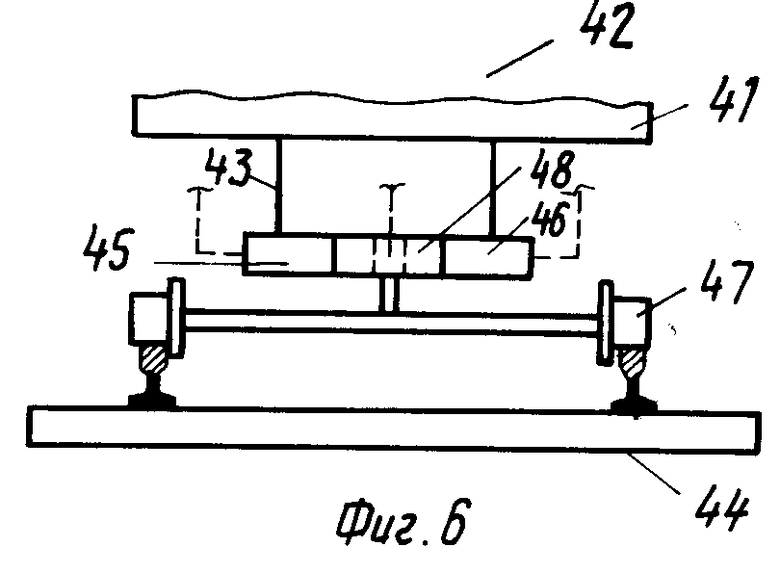
На схематическом изображении на фиг.6 рама 41 выполнена как стабилизатор пути машины 42 и образует базу выравнивающей системы 43 измерения. Предусмотренная для измерения поперечных сдвижек пути 44 система 45 измерения положения пути в плане образована емкостным датчиком перемещений в виде дифференциального конденсатора. Последний образован двумя связанными с измерительной базой или с рамой 41 и отстоящими недалеко друг от друга в поперечном направлении, лежащими в одной плоскости конденсаторными пластинами 46 и еще одной связанной с осью катящихся по пути 44 измерительной тележки 47, слегка отстоящей в направлении длины машины от обеих ранее названных пластин 46, конденсаторной пластины 48. Таким образом, измеряются поперечные сдвижки пути 44 и конденсаторной пластины 48 относительно обеих связанных с рамой 41 конденсаторных пластин 46. Для исключения люфта оси измерительной тележки 47 последняя, как и в других вариантах выполнения машины, прижимается с помощью не показанного на чертеже привода к одному, служащему опорной базой, рельсу.
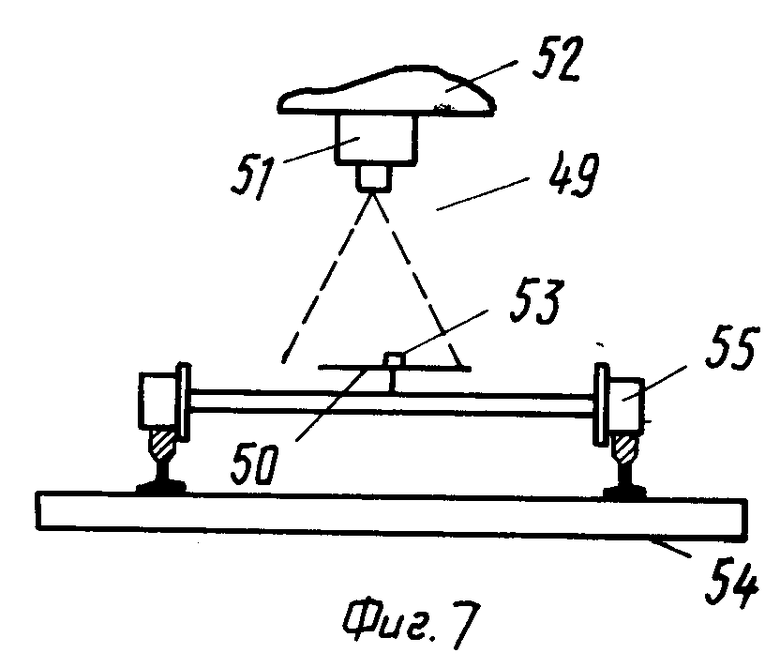
Представленное на фиг.7 измерительное устройство 49 системы 50 измерения состоит из оптоэлектронного сенсора 51, связанного со служащей в качестве измерительной базы системы 50 измерения 52. Этот сенсор имеет ПЗС-строку с прозрачными для света электродами. Фотоны излученного светодиодом 53 света создают в ПЗС-строке соответствующее распределению яркости распределение зарядов. Таким образом, возможно точное измерение поперечного смещения светодиода 53 по отношению к сенсору 51 или раме 52. Светодиод 53 связан с осью катящейся по пути 54 измерительной тележки 55, которая для исключения люфта и образования кинематического контакта прижимается с боков к обоим рельсам. Объектив называемого также однострочной камерой оптоэлектронного сенсора 51 установлен таким образом, что даже значительные поперечные смещения светодиода 53 на крутых кривых пути могут быть им восприняты. Вместо подобного оптоэлектронного сенсора может быть также использован лазерный дальномер или другое подобное устройство.
Использование: для выправки и стабилизации железнодорожного пути. Сущность изобретения: машина содержит раму, опирающуюся на ходовые тележки, агрегаты для стабилизации пути, установленные на раме с возможностью перестановки по высоте приводами. Каждый агрегат состоит из вибратора, установленного на тележке с прижимаемыми приводом к внутренним сторонам рельсов катками с ребордами и вертикальными вращающимися роликами для взаимодействия с внешними сторонами рельсов, и приводов выправки пути в плане. На раме смонтированы система измерения положения пути в продольном профиле и система измерения положения пути в плане, включая в себя измерительную базу и датчик положения пути в плане, закрепленный при помощи эластичной прокладки на оси измерительной тележки или на раме. Измерительная тележка смонтирована на раме между агрегатами для стабилизации пути к указанному датчику подключен электронный фильтр для отделения воздействующих на сигнал колебаний. 6 з. п. ф-лы, 7 ил.
| Патент США N 4046079, кл | |||
| Счетная таблица | 1919 |
|
SU104A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |

