Изобретение относится к весоизмерительной технике и может быть использовано для определения веса и контроля загрузки различного автотранспорта при его движении.
Известны весы для взвешивания большегрузых автомобилей, содержащие блок силоизмерителей, расположенный под весоприемным узлом, преобразующий блок и блок регистрации [1]
Недостаток данного устройства заключается в его больших габаритах, поскольку весоприемный узел должен иметь размеры, обеспечивающие размещение на нем всех колес автомобиля одновременно.
Наиболее близким к предложенному является устройство для взвешивания автотранспорта, содержащее два магнитоупругих силоизмерительных преобразователя, расположенных под весоприемным узлом, на оси, перпендикулярной оси движения автотранспорта, преобразующий блок и блок регистрации [2]
Весоприемный узел устройства-прототипа представляет собой линейную пластину, размещенную заподлицо в полотне дороги перпендикулярно оси движения. Причем ширина пластины выбирается из условия расположения на ней колес только одной оси автомобиля.
Имея малые габариты, прототип тем не менее подвержен ряду существенных недостатков, а именно низкой точности и ограниченности эксплуатационных возможностей. Последний недостаток обусловлен тем, что прототип при контроле проходящего по дороге потока автотранспорта может работать только с автомобилями, имеющими одинаковое количество осей (заранее известное).
Техническая задача изобретения заключается в создании устройства, позволяющего производить взвешивание движущегося автотранспорта с высокой точностью и любым количеством осей.
Поставленная техническая задача решается за счет того, что в известном устройстве для взвешивания автотранспорта, содержащем два силоизмерительных датчика, расположенных под весоприемным узлом на оси, перпендикулярной оси движения автотранспорта, преобразующий блок и блок регистрации, согласно изобретению преобразующий блок выполнен двухканальным и снабжен блоком определения моментов начала и конца взвешивания и блоком коммутации, при этом каждый из каналов преобразующего блока выполнен в виде последовательно соединенных согласующего блока, аналого-цифрового преобразователя и линеаризатора, блок определения моментов начала и конца взвешивания выполнен в виде генератора импульсов и четырех схем И, причем выход генератора импульсов соединен с первым входом первой схемы И, второй инвертирующий вход которой соединен с выходом второй схемы И, входы которой, а также входы третьей схемы И соединены соответственно с инверсными и прямыми выходами счетчика импульсов, С-вход, R-вход и I-вход которого подсоединены соответственно к выходам первой схемы И, третьей схемы И и выходам согласующих блоков, подключенных также к первому входу четвертой схемы И, второй вход которой соединен с выходом второй схемы И, а выход соединен с входом начала взвешивания блока коммутации, вход окончания взвешивания которого соединен с выходом третьей схемы И, а выходы подключены к соответствующим входам блока регистрации.
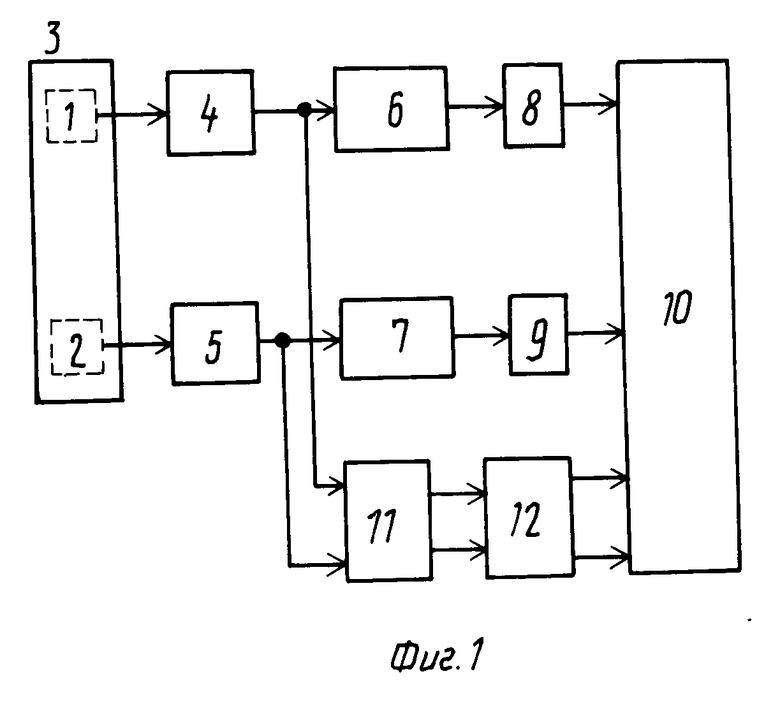
На фиг. 1 изображена общая блок-схема предлагаемого устройства; на фиг. 2 схема выполнения блока определения моментов начала и конца взвешивания.
Устройство для взвешивания автотранспорта содержит два силоизмерительных датчика 1 и 2, например, магнитоупругих. Датчики 1 и 2 расположены под весоприемным узлом 3, представляющим собой плоскую вытянутую плиту, ось которой перпендикулярна оси движения автотранспорта. Верхняя плоскость плиты весоприемного узла 3 располагается на уровне дорожного покрытия. К выходам датчиков 1 и 2 подключены соответствующие каналы преобразующего блока. Каждый из каналов содержит последовательно соединенные согласующий блок 4(5), аналого-цифровой преобразователь 6(7) и линеаризатор 8(9). Каждый из каналов подключен к соответствующему входу блока 10 регистрации и обработки.
Устройство также снабжено блоком 11 определения моментов начала и конца взвешивания и блоком 12 коммутации. Блок 11 содержит генератор 13 импульсов, счетчик 14 импульсов и четыре логических схемы И 15-18.
Работает устройство следующим образом.
При наезде первой оси автомобиля на плиту весоприемного узла 3 датчики 1 и 2 формируют электрические сигналы, соответствующие значению приложенной нагрузки. Через согласующие блоки 4 и 5 сигналы поступают на входы аналого-цифровых преобразователей 6 и 7. С их выхода сигналы в цифровой форме поступают на линеаризаторы 8 и 9, на которых величина сигналов в цифровой форме имеет линейную зависимость от приложенной нагрузки.
Одновременно с этим сигналы выходов согласующих блоков 4 и 5 поступают на вход блока 11 определения моментов начала и конца взвешивания, а именно на I-вход счетчика 14 импульсов и первый вход четвертой логической схемы И 16.
Так как схема И 18 предварительно была открыта, входной сигнал проходит на ее выход, формируя сигнал начала взвешивания, поступающий на соответствующий вход блока коммутации и далее на вход блока регистрации и обработки 10.
Сигнал с выходов блоков 4 и 5 поступает и на I-вход счетчика 14 импульсов, приводящего счетчик в начальное рабочее состояние. При этом на одном из инверсных выходов счетчика появляется единица, которая переводит выход схемы И 16 в нулевое состояние, призакрывая схему И 18 и открывая вход схемы И 15, что позволяет пропустить через нее импульсы с генератора 13 импульсов на С-вход счетчика 14 импульсов.
Если на I-вход счетчика 14 больше не поступает импульсов, то все разряды счетчика заполняются единицами. При этом поступившие единицы со счетчика на входы (число которых равно числу разрядов счетчика 14 схемы И 17) формируют на ее выходе сигнал единицы конца взвешивания, который поступает на R-вход счетчика 14, приводя его в исходное состояние. Этот же сигнал поступает на соответствующий вход блока коммутации.
Если до момента заполнения всех разрядов счетчика импульсов 14 на I-вход поступит входной импульс, формируемый от силоизмерителей (характеризующий, что на весоприемный узел 3 поехала следующая ось автомобиля), то счетчик 14 опять будет приведен в начальное рабочее состояние, не формируя импульса конца взвешивания.
Частота генератора 13 импульсов и количество разрядов счетчика 14 выбирается исходя из условия обеспечения прохождения следующих осей одного автомобиля с заданной скоростью через весоприемный узел 3 до заполнения всех разрядов счетчика.
Временной интервал до начала прохождения следующего автомобиля должен превышать время, необходимое на заполнение разрядов счетчика.
Сигналы начала и конца взвешивания с выходов блока 12 коммутации поступают на соответствующие входы блока 10 обработки и регистрации. В интервале времени между этими сигналами происходит суммирование значений веса каналов преобразующего блока. Полученная сумма этих заданий характеризует вес автомобиля и записывается в память с возможностью последующей распечатки на бумажном носителе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для взвешивания подвижных единиц рельсового транспорта | 1992 |
|
SU1816317A3 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1992 |
|
RU2007693C1 |
| Устройство для определения давления колес на рельс | 1991 |
|
SU1813204A3 |
| Крановые весы | 1991 |
|
SU1813205A3 |
| Устройство для взвешивания движущихся железнодорожных составов | 1982 |
|
SU1089427A1 |
| Устройство учета горной массы,транспортируемой вагонетками | 1983 |
|
SU1170285A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
| МОНОРЕЛЬСОВЫЕ ВЕСЫ | 1992 |
|
RU2057302C1 |
| Устройство для диагностирования пневматического тормозного привода автомобиля | 1987 |
|
SU1594030A1 |
| Весоизмерительное устройство | 1985 |
|
SU1278606A1 |
Использование: изобретение относится к весоизмерительной технике и может быть использовано для определения веса и контроля загрузки различного автотранспорта при его движении. Сущность изобретения: с целью взвешивания движущегося автотраспорта с высокой степенью точности и любым количеством осей устройство содержит два силоизмерительных датчика, расположенных под весоприемным узлом на оси, перпендикулярной оси движения автотранспорта, преобразующий блок и блок регистрации. Преобразующий блок выполнен двухканальным и снабжен блоком определения моментов начала и конца взвешивания и блоком коммутации, при этом каждый из каналов преобразующего блока выполнен в виде последовательно соединенных согласующего блока, аналого-цифрового преобразователя и линеаризатора. Блок определения моментов начала и конца взвешивания содержит генератор 13 импульсов и четыре схемы 15 18, причем выход генератора 13 соединен с первым входом первой схемы И 15, второй инвертирующий вход которой соединен с выходом второй схемы И 16, входы которой, а также входы третьей схемы И 17 соединены соответственно с инверсными и прямыми выходами счетчика 14 импульсов, C-вход, R-вход, и I-вход которого подсоединены соответственно к выходам первой схемы И, третьей схемы и выходам согласующих блоков, подключенных также к первому входу четвертой схемы И 18, второй вход которой соединен с выходом второй схемы И, а выход соединен с входом начала взвешивания блока коммутации, вход окончания взвешивания которого соединен с выходом третьей схемы И, а выходы подключены к соответствующим входам блока регистрации. 2 ил.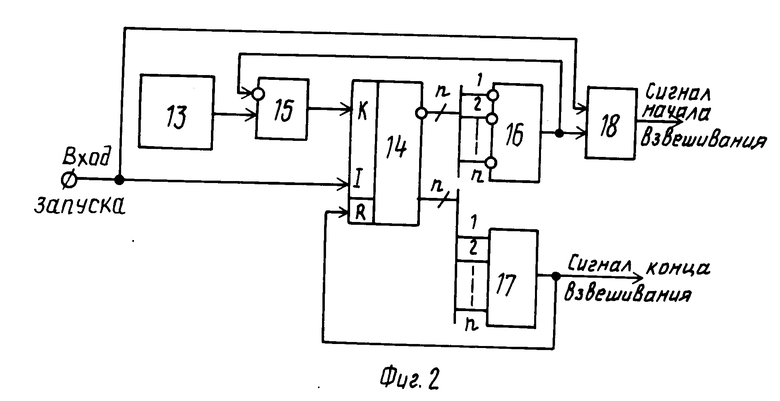
УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ АВТОТРАНСПОРТА, содержащее два силоизмерительных датчика, расположенных под весоприемным узлом на оси, перпендикулярной оси движения автотранспорта, преобразующий блок и блок регистрации, отличающееся тем, что преобразующий блок выполнен двухканальным и снабжен блоком определения моментов начала и конца взвешивания и блоком коммутации, при этом каждый из каналов преобразующего блока выполнен в виде последовательно соединенных согласующего блока, аналого-цифрового преобразователя и линеаризатора, блок определения моментов начала и конца взвешивания выполнен в виде генератора импульсов и четырех схем И, причем выход генератора импульсов соединен с первым входом первой схемы И, второй инвертирующий вход которой соединен с выходом второй схемы И, входы которой, а также входы третьей схемы И соединены соответственно с инверсными и прямыми выходами счетчика импульсов, C-, R- и I-входы которого подсоединены соответственно к выходам первой и третьей схем И и выходам согласующих блоков, подключенных также к первому входу четвертой схемы И, второй вход которой соединен с выходом второй схемы И, а выход соединен с входом начала взвешивания блока коммутации, вход окончания взвешивания которого соединен с выходом третьей схемы И, а выходы подключены к соответствующим входам блока регистрации.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для УЧЕТА АВТОТРАНСПОРТА | 0 |
|
SU201739A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
