Изобретение относится к способам посадки беспилотных летательных аппаратов (БПЛА) и может быть использовано при создании новых и модернизации существующих систем посадки БПЛА.
Известен способ посадки БПЛА при помощи парашютной системы [1], который состоит в том, что на БПЛА предварительно устанавливают парашютную систему со сложенным парашютом, а в районе посадки БПЛА обеспечивают раскрытие этого парашюта, в результате чего скорость приземления БПЛА не превышает допустимого значения.
Недостатком этого способа является увеличение стартовой массы БПЛА за счет массы устанавливаемой на нем парашютной системы.
Известен также способ посадки БПЛА улавливанием в вертикальную сеть [2], который состоит в том, что предварительно в носовой части БПЛА устанавливают импульсный источник излучения в ближней инфракрасной области спектра. На пункте посадки (ПП) БПЛА предварительно устанавливают платформу, которая неподвижна в процессе посадки БПЛА, на платформу устанавливают вертикальную раму с возможностью вращения вокруг вертикальной оси и привод для выполнения этого вращения. На раму предварительно устанавливают два приемника инфракрасного излучения, которые настраивают на частоту излучения источника инфракрасного излучения, установленного на БПЛА, вертикальную посадочную сеть с возможностью ее горизонтального перемещения по направляющим, которые закрепляют на раме, вычислитель и тормозное устройство, которое тросами соединяют с сетью. С помощью привода раму предварительно поворачивают в соответствии с направлением ветра. На конечном участке захода на посадку БПЛА выводят в зону действия приемников инфракрасного излучения на максимальной дальности действия этих приемников, с помощью которых измеряют угол возвышения и боковое смещение БПЛА относительно центра сети, вычисляют величины отклонений БПЛА от программной траектории его полета, автоматически передают эти величины на БПЛА и корректируют траекторию полета БПЛА для обеспечения входа БПЛА в сеть. При входе БПЛА в сеть перемещают сеть по направляющим рамы, гасят кинетическую энергию движения БПЛА за счет вытягивания тросов тормозного устройства и вынимают заторможенный БПЛА из сети.
Недостатком этого способа является снижение вероятности неповреждения БПЛА при его посадке в сложных метеорологических условиях, при которых существенно уменьшается дальность действия приемников инфракрасного излучения.
Прототипом заявляемого изобретения следует считать способ посадки БПЛА улавливанием в вертикальную сеть [2], общими признаками которого с заявляемым изобретением является то, что предварительно в носовой части БПЛА устанавливают импульсный источник излучения. На пункте посадки устанавливают платформу, на платформу устанавливают вертикальную раму с возможностью поворота вокруг вертикальной оси и привод для выполнения этого поворота. На раму предварительно устанавливают два приемника импульсного излучения, которые настраивают на частоту излучения импульсного источника излучения, установленного на БПЛА, вертикальную посадочную сеть с возможностью ее горизонтального перемещения по направляющим, которые закрепляют на раме, вычислитель и тормозное устройство, которое тросами соединяют с сетью. С помощью привода раму предварительно поворачивают в соответствии с направлением ветра. На конечном участке захода БПЛА на посадку его вводят в зону действия приемников излучения на максимальной дальности их действия, с помощью этих приемников измеряют угол возвышения и боковое смещение БПЛА относительно центра сети, вычисляют величины отклонений БПЛА от программной траектории его полета, автоматически передают эти величины на БПЛА и корректируют траекторию полета БПЛА для обеспечения входа БПЛА в сеть. При входе БПЛА в сеть перемещают сеть по направляющим рамы, гасят кинетическую энергию движения БПЛА за счет вытягивания тросов тормозного устройства и вынимают заторможенный БПЛА из сети.
Кроме того, в прототипе платформа неподвижна в процессе посадки БПЛА, на БПЛА устанавливают источник импульсного излучения, который излучает только в ближней инфракрасной области спектра, а на раме устанавливают приемники только этого излучения.
Недостатком прототипа является снижение вероятности неповреждения БПЛА при его посадке в сложных метеорологических условиях, при которых существенно уменьшается дальность действия приемников инфракрасного излучения. Это объясняется тем, что при постоянной скорости сближения БПЛА с пунктом посадки (ПП) уменьшение дальности действия приемников инфракрасного излучения вызывает уменьшение времени движения БПЛА от момента его входа в зону действия этих приемников до входа БПЛА в сеть, в течение которого производится коррекция траектории полета БПЛА для обеспечения попадания БПЛА в сеть. Это, в свою очередь, ведет к снижению вероятности неповреждения БПЛА при его посадке. Справедливость этого утверждения проиллюстрируем следующими расчетами. Допустим, что расстояние между положением БПЛА и центром сети в горизонтальной плоскости при входе БПЛА в зону действия приемников инфракрасного излучения на максимальной дальности Дm их действия равно По, а процесс изменения этого расстояния при коррекции траектории полета БПЛА можно моделировать работой апериодического звена. Допустим также, что По является случайной величиной, распределенной по нормальному закону с нулевым математическим ожиданием и средним квадратическим отклонением (СКО) σ0. Тогда значение σк(Tк) СКО этого расстояния при входе БПЛА в сеть в момент времени Тк определяется выражением
σ(Tк) = σ0•exp(-Tк/T), (1)
где Т - постоянная времени апериодического звена, а значение Тк времени движения БПЛА к сети с дальности Дm со скоростью сближения V определяется выражением
Tk = Дm/V. (2)
Обозначим размер сети в горизонтальной плоскости через Lc, a размах крыла БПЛА - через Lкр. Неповреждение ДПЛА от столкновения его крыла с вертикальными стойками рамы обеспечивается в том случае, если при входе БПЛА в сеть в момент времени Тк расстояние между центром сети и геометрическим центром БПЛА в горизонтальной плоскости не превышает величины
L = 0,5 •(Lc - Lкр). (3)
Вероятность Рвг этого события определяется выражением
Pвг = Ф(L/σ(Тк)), (4)
где Ф - приведенная функция Лапласа.
Зададим
V = 40 м/с; T = 2 с; σ0 = 60 м; Дmп = 400 м;
Дmc = 240 м, Lc = 7 м; Lкр = 4 м; (5)
где Дmп - значение Дm в простых метеоусловиях; Дmс - значение Дm в сложных метеоусловиях.
Результаты расчетов по формулам (1)-(4) при исходных данных (5) представлены в таблице.
Анализ результатов расчетов, приведенных в таблице, убеждает в существенном снижении вероятности неповреждения БПЛА при посадке БПЛА в сложных метеорологических условиях.
Целью заявляемого изобретения является устранение указанного недостатка прототипа, а именно повышение вероятности неповреждения БПЛА при его посадке в сеть в сложных метеорологических условиях.
Эта цель достигается тем, что на пункте посадки (ПП) платформу устанавливают с возможностью ее поступательного перемещения по направлению горизонтальной оси, перпендикулярной плоскости сети, а также привод этого перемещения платформы в этом направлении, на этой раме дополнительно устанавливают датчик линейного ускорения (ДЛУ), ось чувствительности которого выставляют по этому направлению, дальномер и датчик начала вытягивания тросов (ДНВТ) тормозного устройства (ТУ), предварительно в вычислитель вводят значение Дmп максимальной дальности действия приемников импульсного излучения в простых метеорологических условиях, на конечном участке захода БПЛА на посадку на ПП измеряют текущую дальность Д(t) от ПП до БПЛА и вводят ее в вычислитель, вычисляют текущее значение V(t) скорости сближения БПЛА с ПП, запоминают в вычислителе значения Д(Тв) этой дальности и V(Тв) этой скорости в момент времени Тв входа БПЛА в зону действия приемников импульсного излучения, с использованием Д(Тв), V(Тв) и Дmп вычисляют потребное значение Jтр ускорения поступательного перемещения платформы по этому направлению, и при Jтp≠0 включают привод поступательного перемещения платформы, с помощью которого поступательно перемещают ее в этом направлении, с помощью ДЛУ измеряют текущее значение J(t) ускорения этого перемещения, подают J(t) в вычислитель, вычисляют разность значений Jтp и J(t), пропорционально которой управляют этим приводом, уменьшая эту разность к нулю, и в момент входа БПЛА в сеть выключают этот привод по сигналу от ДНВТ.
Кроме того, на БПЛА могут устанавливать как импульсный источник излучения в ближней, инфракрасной области спектра, так и вместо него на БПЛА могут устанавливать источник импульсного излучения другой области спектра, например дальней инфракрасной или радиолокационной области спектра электромагнитного излучения. При этом на раме устанавливают приемники импульсного излучения той же области спектра. Поэтому ниже в материалах заявки рассматривается общий случай установки на БПЛА импульсного источника излучения и установки на раму двух приемников этого излучения без указания конкретной области спектра этого излучения.
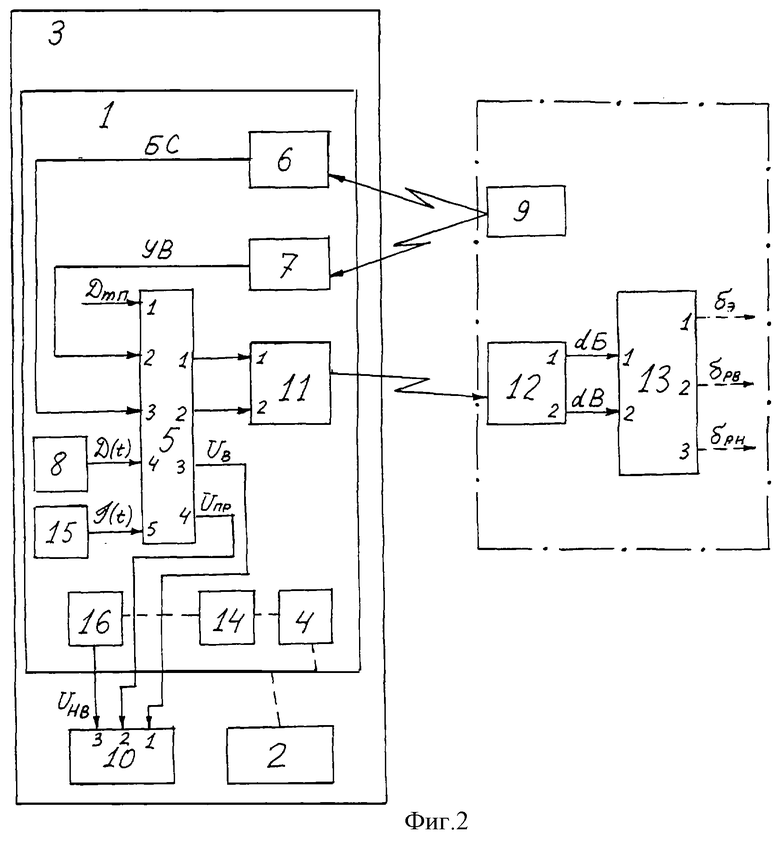
Существо заявляемого изобретения поясняется схемами, изображенными на фиг. 1 и фиг.2. На фиг.1 показана схема взаимного положения в горизонтальной плоскости ПП и БПЛА в момент входа БПЛА в зону действия приемников импульсного излучения от БПЛА.
На фиг. 1 обозначено: Р - место расположения платформы на ПП; Б - место расположения БПЛА в момент времени Тв его входа в зону действия приемников импульсного излучения; Д(Тв) - дальность от ПП до БПЛА в момент времени Тв; V(Tв) - вектор скорости сближения БПЛА с ПП; J - вектор ускорения ПП в направлении горизонтальной оси, перпендикулярной плоскости сети; Lс - размер сети в горизонтальной плоскости; По - расстояние между БПЛА и центром сети в горизонтальной плоскости в момент времени Тв.
На фиг.2 показана блок-схема возможного варианта устройства, реализующего предлагаемый способ.
На фиг. 2 обозначено: 1 - вертикальная рама (ВР); 2 - привод поворота (ПВ) ВР 1; 3 - платформа (П); 4 - вертикальная сеть (ВС); 5;- вычислитель (В); 6 - приемник импульсного излучения (ПРБ), который измеряет боковое смещение (БС) БПЛА от оси, перпендикулярной плоскости ВС 4; 7 - приемник импульсного излучения (ПРВ), который измеряет угол возвышения (УВ) БПЛА относительно этой оси; 18 - дальномер (Д), который измеряет значения Д(Тi) дальности между БПЛА и ПП; 9 - импульсный источник излучения (И); 10 - привод поступательного перемещения (ППП) П 3; 11 - радиопередатчик (ПРД); 12 - радиоприемник (ПРМ); 13 - автопилот (АП); 14 - тормозное устройство (ТУ); 15 - датчик линейного ускорения (ДЛУ) J(t) П 3; 16 - датчик начала вытягивания тросов (ДНВТ) ТУ 14; Дmп - максимальная дальность действия ПРБ 6, ПРВ 7; dБ - боковое смещение БПЛА от программной траектории его полета; dВ - смещение БПЛA по вертикали от программной траектории его полета; Uв - сигнал включения ППП 10; Uпp - управляющий сигнал; Uнв - сигнал выключения ППП 10. В блоках, которые имеют более одного входа или одного выхода, соответствующие входы и выходы пронумерованы. Пунктирными линиями показаны механические связи между блоками. Штрихпунктирной линией ограничены блоки, установленные на БПЛА.
Существо предлагаемого способа состоит в следующем. Предварительно в вычислитель, установленный на вертикальной раме, вводят значение Дmп максимальной дальности действия приемников импульсного излучения в простых метеорологических условиях. На конечном участке захода БПЛА на посадку (фиг.1) на ПП измеряют текущие значения Д(Тi) дальности от ПП до БПЛА в дискретные моменты времени Ti и вводят эти значения дальности в вычислитель, где вычисляют соответствующие значения V(Ti) скорости сближения БПЛА с ПП
V(Ti) = (Д(Ti) - Д(T(i-1))/dT, (i=1, 2,...), (6)
где dT - интервал времени между соседними измерениями дальности.
При подходе БПЛА к ПП на дальность действия установленных на раме приемников импульсного излучения в реальных условиях посадки на выходах этих приемников появляются соответствующие сигналы, которые подают в вычислитель. Измеренное значение Д(Тв) дальности между БПЛА и ПП в момент времени Тв поступления этих сигналов на вход вычислителя запоминают в нем. Также в вычислителе запоминают значение V(Тв), которое вычисляют по формуле (6) для значения дальности Д(Тi)=Д(Тв). С использованием значений Д(Тв), V(Тв) и Дmп вычисляют значение Тпу времени движения БПЛА от границы зоны действия приемников импульсного излучения до входа в сеть в простых метеоусловиях и значение Тру времени движения БПЛА от этой границы до его входа в сеть в реальных метеоусловиях
Tпу = Дmп/V(Tв), Тру = Д(Тв)/V(Тв). (7)
Полученные значения Тпу и Тру сравнивают в вычислителе. Если Тру≥Тпу, что имеет место при посадке БПЛА в простых метеоусловиях, то посадку БПЛА производят так же, как и в прототипе, выполняя после ввода БПЛА в зону действия приемников импульсного излучения следующие операции:
1) с помощью приемников импульсного излучения измеряют боковое смещение и угол возвышения БПЛА относительно центра сети;
2) вычисляют величины отклонений БПЛА от программной траектории его полета;
3) автоматически передают эти величины на БПЛА и корректируют траекторию полета БПЛА для обеспечения входа БПЛА в сеть;
4) при входе БПЛА в сеть перемещают сеть по направляющим рамы и гасят кинетическую энергию движения БПЛА за счет вытягивания тросов тормозного устройства;
5) вынимают заторможенный БПЛА из сети.
При посадке БПЛА в сложных метеоусловиях, когда Д(Тв)<Дmп, получим Тру<Тпу. В этом случае для увеличения времени движения БПЛА от входа его в зону действия приемников импульсного излучения до подхода к сети, что приведет к росту вероятности неповреждения БПЛА при его посадке, необходимо уменьшить скорость сближения БПЛА с ПП. В предлагаемом способе это достигают тем, что при неизменной скорости полета БПЛА с момента входа его в зону действия приемников импульсного излучения разгоняют платформу в направлении горизонтальной оси, перпендикулярной плоскости сети, с помощью привода поступательного перемещения платформы в этом направлении. Потребное значение Jтp ускорения поступательного перемещения платформы в этом направлении определяют по формуле
Jтр = 2 • (V(Тв) - Д(Тв)/Тпу)/Тпу, (8)
полученной из условия, что время равноускоренного движения БПЛА с дальности Д(Тв) до входа его в сеть равно значению Тпу.
После вычисления Jтp включают этот привод, и на его вход с вычислителя подают управляющий сигнал Uпp
Uпp = Кпр • (Jтр - J(t)), (9)
где Кпр - коэффициент усиления; J(t) - текущее значение ускорения платформы в этом направлении, которое измеряют датчиком линейного ускорения (ДЛУ), установленным на раме так, что ось чувствительности ДЛУ выставлена по этому направлению. Значение J(t) с выхода ДЛУ подают на вычислитель. В результате отработки приводом входного сигнала (9) поступательно перемещают платформу в этом направлении, вследствие чего время движения БПЛА от границы зоны действия приемников импульсного излучения до входа его в сеть в сложных метеоусловиях увеличивается по сравнению с Тру (7). Одновременно после ввода БПЛА вагону действия приемников импульсного излучения выполняют операции 1)-5), указанные выше. Кроме того, в момент начала вытягивания тросов тормозного устройства по сигналу от ДНВТ выключают привод поступательного перемещения платформы.
Таким образом, использование предлагаемого способа при посадке БПЛА в сложных метеорологических условиях позволяет существенно увеличить, по сравнению с прототипом, время движения БПЛА до ПП после ввода БПЛА в зону действия приемников импульсного излучения, в результате чего повышается вероятность неповреждения БПЛА при его посадке. Справедливость этого иллюстрируется следующим расчетом. Для исходных данных (5) в сложных метеоусловиях при
Д(Тв) = Дmc, V(Тв) = V (10)
в соответствии с формулами (7) получим
Тпу = 400/40 = 10 с, Тру = 240/40 = 6 с.
Так как Тру<Тпу, то по формуле (8) получим
Jтр = 2 • (40 - 240/10)/10 = 3,2 м/с2 (11)
Допустим, что изменение ускорения J(t) при отработке приводом поступательного движения платформы входного сигнала (9) определяют
J(t) = Jтр • (1 - exp(t/Ту)), (12)
где Ту - постоянная времени процесса изменения J(t). Тогда значение Ткд времени движения БПЛА с дальности Д(Тв) до входа БПЛА в сеть при поступательном перемещении платформы с ускорением (12) в направлении горизонтальной оси, перпендикулярной плоскости сети, определяется следующим уравнением:
Д(Тв)-(V(Тв) + Jтp•Ту) • Ткд + Jтp • Т2кд/2 + JTp • Т2у • (1 - ехр(-Ткд/Ту))=0.
В результате решения этого уравнения при Ту=0,5 с с учетом (5), (10), (11) получим
Ткд=8,72 с.
Подставив в формулу (1)
Тк=Ткд,
с учетом исходных данных (5) получим
σ(Ткд)=0,78 м.
Тогда в соответствии с формулами (3), (4) при σ(Тк)=σ(Ткд) и исходных данных (5) значение Рвг вероятности неповреждения БПЛА при его посадке в сложных метеоусловиях с использованием предлагаемого способа составляет
Рвг=0,945
и значительно превышает значение этой вероятности (Рвг=0,383 в таблице), характеризующей прототип, что доказывает достижение цели изобретения.
Возможный вариант устройства (фиг.2), реализующего предложенный способ, содержит П 3, установленную на пункте посадки БПЛА с возможностью поступательного перемещения вдоль ее продольной оси, ППП 10, обеспечивающий это перемещение П 3, ВР 1 с горизонтальными направляющими, установленную на П 3 с возможностью поворота вокруг вертикальной оси, ПВ 2, обеспечивающий этот поворот в соответствии с направлением ветра, ВС 4, которую устанавливают на ВР 1 с возможностью перемещения по направляющим ВР 1, установленные на ВР 1 В 5, ТУ 14, тросы которого соединены с ВС 4, два приемника ПРБ 6 и ПРВ 7, Д 8, ПРД 11, ДЛУ 15 и ДНВТ 16, а также установленные на БПЛА И 9, ПРМ 12 и АП 13, причем П 3 устанавливают на пункте посадки так, чтобы ее продольная ось была параллельна горизонтальной оси, перпендикулярной плоскости ВС 4.
Выход ПВ 2 механически связан с ВР 1, ВС 4 механически связана с направляющими ВР 1 и с ТУ 14, вход ДНВТ 16 механически связан с ТУ 14, первый, второй и третий выходы ПА 13 механически связаны соответственно с осями элеронов, рулей высоты и рулей направления БПЛА, первый вход В 5 электрически связан с выходом устройства ввода значения Дmп, выход ПРБ 6 электрически связан со вторым входом В 5, выход ПРВ 7 электрически связан с третьим входом В 5, выход Д 8 электрически связан с четвертым входом В 5, выход ДЛУ 15 электрически связан с пятым входом В 5, первый и второй выходы В 5 электрически связаны соответственно с первым и вторым входами ПРД 11, третий и четвертый выходы В 5 электрически связаны соответственно с первым и вторым входами ППП 10, выход ДНВТ 16 электрически связан с третьим входом ППП 10, а первый и второй выходы ПРМ 12 электрически связаны соответственно с первым и вторым входами АП 13.
Работает это устройство следующим образом. На пункте посадки (ПП) предварительно после поворота ВР 1 приводом ПВ 2 в соответствии с направлением ветра П3 устанавливают так, чтобы ее продольная ось была параллельна горизонтальной оси ВР 1, перпендикулярной плоскости ВС 4. В В 5 предварительно вводят значение Дmп максимальной дальности действия НРБ 6 и ПРВ 7. На конечном участке захода БПЛА на посадку Д 8 измеряет значения Д(Тi) дальности от ПП до БПЛА в дискретные моменты времени Тi. Эти значения дальности вводят в В 5, где вычисляют значения V(Ti) скорости сближения БПЛА с ПП по алгоритму (6). В момент времени Тв приема хотя бы одним из приемников ПРБ 6, ПРВ 7 излучения от И 9, что имеет место при вводе БПЛА в зону действия приемников импульсного излучения от БПЛА, в В 5 запоминают значения Д(Тв) и V(Тв), вычисляют значения Тпу и Тру по алгоритму (7) и сравнивают эти значения. При Тру>Тпу в В 5 не формируют сигнал Uв включения ППП 10 и выполняют следующие операции: 1) ПРБ 6 измеряет БС БПЛА, которое подают на В 5; 2) ПРВ 7 измеряет УВ БПЛА, которое подают на В 5; 3) в В 5 вычисляют величины dБ и dB и подают их на ПРД 11; 4) автоматически передают эти величины на БПЛА: 5) принимают эти величины на БПЛА и с ПРМ 12 подают их на АП 13; 6) АП 13 отклоняет элероны, рули высоты и рули направления БПЛА на соответствующие позиции и корректирует траекторию полета БПЛА для обеспечения его входа в ВС 4; 7) при входе БПЛА в ВС 4 перемещают ВС 4 по направляющим ВР 1 и гасят кинетическую энергию движения БПЛА за счет вытягивания тросов ТУ 14; 8) вынимают заторможенный БПЛА из ВС 4. Если при сравнении Тру и Тпу выполняется неравенство Тру<Тпу, то кроме указанных операций 1) - 8), одновременно с операциями 1) и 2) формируют в В 5 сигнал Uв включения ППП 10 и подают этот сигнал на ППП 10, вычисляют в В 5 значение Jтp (8), измеряют с помощью ДЛУ 15 значение J(t) ускорения поступательного перемещения П 3 и с выхода ДЛУ 15 подают J(t) на В 5, где формируют сигнал Uпp (9), который с В 5 подают на ППП 10, который поступательно перемещает П 3. При входе БПЛА в ВС 4 с выхода ДНВТ 16 получают сигнал Uнв, подают Uнв на ППП 10 и выключают ППП 10 по этому сигналу.
Источники информации
1. Ежемесячный информационный бюллетень "Иностранная печать об экономическом, научно-техническом и военном потенциале государств-участников СНГ и технических средствах его выявления", серия "Технические средства разведывательных служб капиталистических государств". - М., 6, 1998, с.21.
2. Федосов Е.А. (редактор). "Дистанционно пилотируемые летательные аппараты капиталистических стран" (Обзор по материалам иностранной печати). - М.: Научно-информационный центр, 1989, с.51-61.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА НА ЦЕЛЬ | 1997 |
|
RU2117312C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЦЕЛЬ | 2001 |
|
RU2204785C2 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| СПОСОБ РАДИООБМЕНА ИНФОРМАЦИЕЙ | 2000 |
|
RU2197065C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ ПУСКЕ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2243481C1 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ | 1998 |
|
RU2133497C1 |

Изобретение относится к технике посадки беспилотных летательных аппаратов (ЛА). На ЛА устанавливают импульсный источник излучения. В пункте посадки на платформу устанавливают вертикальную поворотную раму, два приемника импульсного излучения от источника ЛА, вертикальную посадочную сеть с возможностью горизонтального перемещения по направляющим, вычислитель и тормозное устройство. На конечном участке захода ЛА на посадку его вводят в зону действия приемников, с помощью которых измеряют угол возвышения и боковое смещение ЛА относительно центра упомянутой оси. Далее вычисляют величины отклонений ЛА от программной траектории полета и корректируют траекторию полета ЛА для обеспечения его входа в сеть. При входе ЛА в сеть ее перемещают по направляющим рамы и гасят кинетическую энергию движения ЛА за счет вытягивания тросов тормозного устройства. Отличие способа заключается в том, что платформу устанавливают с возможностью поступательного перемещения по направлению горизонтальной оси, перпендикулярной плоскости сети, а на раме дополнительно устанавливают датчик линейного ускорения, дальномер и датчик начала вытягивания тросов тормозного устройства. На конечном участке захода ЛА на посадку измеряют текущую дальность от ЛА до пункта посадки и вычисляют текущее значение скорости сближения ЛА с пунктом посадки и потребное значение ускорения поступательного перемещения платформы. Изобретение позволяет повысить вероятность неповреждения ЛА при посадке в сложных метеоусловиях. 2 ил., 1 табл.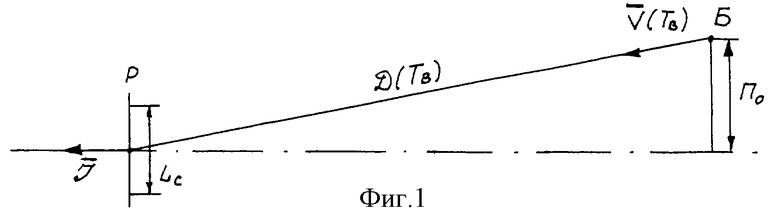
Способ посадки летательного аппарата, который состоит в том, что предварительно на беспилотный летательный аппарат устанавливают импульсный источник излучения, на пункте посадки устанавливают платформу, на которую устанавливают вертикальную раму с возможностью поворота вокруг вертикальной оси, и привод этого поворота, на эту раму устанавливают два приемника импульсного излучения от этого источника излучения, которые настраивают на частоту излучения этого источника излучения, вертикальную посадочную сеть с возможностью ее горизонтального перемещения по направляющим, которые закрепляют на этой раме, вычислитель и тормозное устройство, которое тросами соединяют с этой сетью, с помощью привода поворота эту раму предварительно поворачивают в соответствии с направлением ветра, на конечном участке захода этого аппарата на посадку его вводят в зону действия этих приемников, с помощью которых измеряют угол возвышения и боковое смещение этого аппарата относительно центра этой оси, вычисляют величины отклонений этого аппарата от программной траектории полета, которые автоматически передают на этот аппарат и корректируют траекторию полета этого аппарата, для обеспечения его входа в эту сеть, при входе этого аппарата в эту сеть ее перемещают по направляющим этой рамы, гасят кинетическую энергию движения этого аппарата за счет вытягивания тросов тормозного устройства и вынимают этот аппарат из этой сети, отличающийся тем, что на пункте посадки предварительно платформу устанавливают с возможностью поступательного перемещения по направлению горизонтальной оси, перпендикулярной плоскости этой сети, дополнительно устанавливают привод этого перемещения платформы, на этой раме дополнительно устанавливают датчик линейного ускорения, ось чувствительности которого выставляют по этому направлению, дальномер и датчик начала вытягивания тросов тормозного устройства, предварительно в вычислитель вводят значение Дmп максимальной дальности действия этих приемников в простых метеорологических условиях, на конечном участке захода этого аппарата на посадку измеряют текущую дальность Д(t) от этого аппарата до пункта посадки и вводят ее в вычислитель, вычисляют текущее значение V(t) скорости сближения этого аппарата с пунктом посадки, запоминают в вычислителе значения Д(Тв) этой дальности и V(Тв) этой скорости в момент времени Тв входа этого аппарата в зону действия этих приемников, с использованием Д(Тв), V(Тв) и Дmп вычисляют потребное значение Jтp ускорения поступательного перемещения платформы по этому направлению и если Jтp не равно нулю, то включают привод поступательного перемещения платформы, с помощью которого поступательно перемещают ее в этом направлении, с помощью датчика линейного ускорения измеряют текущее значение J(t) ускорения этого перемещения, подают J(t) в вычислитель, вычисляют разность Jтр и J(t), пропорционально которой управляют этим приводом, уменьшая эту разность к нулю, и в момент входа аппарата в эту сеть выключают этот привод по сигналу от датчика начала вытягивания тросов тормозного устройства.
| Дистанционно пилотируемые летательные аппараты капиталистических стран (Обзор по материалам иностранной печати)/Под ред | |||
| Е.А.Федосова | |||
| - М.: Научно-информационный центр, 1989, с.51-61 | |||
| RU 94020615 А1, 10.09.1996 | |||
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К МЕСТУ ПРИЗЕМЛЕНИЯ И КОМПЛЕКС УСТРОЙСТВ НАЗЕМНОГО И БОРТОВОГО ОБОРУДОВАНИЯ | 1995 |
|
RU2110448C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1990 |
|
RU2018785C1 |

