Изобретение относится к способам ориентации в вертикальной плоскости поля зрения (ПЗ) системы обзора (оптической, инфракрасной, радиотехнической и т. д. ), установленной на беспилотном дистанционно пилотируемом летательном аппарате (ДПЛА), и может быть использовано при создании новых и модернизации существующих систем обзора (СО) ДПЛА.
Известен способ ориентации в вертикальной плоскости ПЗ СО ДПЛА [1], состоящий в том, что на ДПЛА в вертикальной плоскости неподвижно относительно ДПЛА устанавливают СО из четырех телевизионных камер (ТК), три из которых имеют широкое ПЗ поле зрения и установлены так, что их суммарное ПЗ составляет 90o, а ось ПЗ (ОПЗ) четвертой ТК, имеющей узкое ПЗ, направлена вертикально. Недостатком этого способа является большое количество ТК.
Известен также способ ориентации в вертикальной плоскости ПЗ СО ДПЛА [2] , состоящий в том, что на ДПЛА устанавливают СО, содержащую одну обзорную камеру (телевизионную, тепловизионную и т.д.), с возможностью ее поворота в вертикальной плоскости относительно ДПЛА, на наземном пункте управления (НПУ) определяют требуемое значение угла ориентации ПЗ СО в вертикальной плоскости относительно продольной оси (ПО) ДПЛА, по радиоканалу передают с НПУ на ДПЛА это требуемое значение этого угла, которое принимают на ДПЛА, где измеряют текущее значение угла ориентации ПЗ СО в вертикальной плоскости относительно ПО ДПЛА, сравнивают текущее и требуемое значения угла ориентации ПЗ СО в вертикальной плоскости и поворачивают СО ДПЛА в этой плоскости до совпадения этих значений этого угла. Недостатком этого способа является возможность появления ошибки в принятом на ДПЛА требуемом значении угла ориентации ПЗ СО в вертикальной плоскости, обусловленная радиопомехами, которые могут возникнуть в радиоканале передачи этого значения этого угла от НПУ к ДПЛА.
Прототипом заявляемого изобретения следует считать способ ориентации в вертикальной плоскости ПЗ СО ДПЛА [2], общими признаками которого с заявляемым изобретением является то, что на ДПЛА устанавливают систему обзора, содержащую одну обзорную камеру (телевизионную, тепловизионную и т.д.), с возможностью ее поворота в вертикальной плоскости относительно ДПЛА и на ДПЛА измеряют текущее значение угла ориентации ПЗ СО в вертикальной плоскости относительно ПО ДПЛА.
Кроме того, в прототипе на наземном пункте управления (НПУ) определяют требуемое значение угла ориентации ПЗ СО в вертикальной плоскости относительно ПО ДПЛА, по радиоканалу передают с НПУ на ДПЛА это значение этого угла, на ДПЛА принимают это значение этого угла, сравнивают текущее и требуемое значения этого угла и поворачивают СО ДПЛА в этой плоскости до совпадения этих значений этого угла.
Недостатком прототипа является возможность появления ошибки в принятом на ДПЛА требуемом значении угла ориентации ПЗ СО в вертикальной плоскости. Это обусловлено тем, что одновременно с полезным радиосигналом, содержащим информацию о требуемом значении угла ориентации ПЗ СО, на ДПЛА приходят помеховые радиосигналы. Они могут быть помеховыми радиосигналами естественного происхождения, например отражениями полезного радиосигнала от земной (водной) поверхности на пути от НПУ до ДПЛА, которые являются особенно интенсивными при полете ДПЛА на малых высотах. Помеховые радиосигналы может также создавать противник на несущей частоте полезного радиосигнала. Помеховые радиосигналы искажают полезный радиосигнал на входе радиоприемника ДПЛА, в результате чего появляется ошибка в принятом на ДПЛА требуемом значении угла ориентации ПЗ СО в вертикальной плоскости.
Целью заявляемого изобретения является устранение указанного недостатка прототипа, а именно исключение возможности появления на ДПЛА ошибки в требуемом значении угла ориентации ПЗ СО в вертикальной плоскости.
Эта цель достигается тем, что в заявляемом изобретении все операции, которые необходимы для определения требуемого значения угла ориентации ПЗ СО в вертикальной плоскости, выполняются на борту ДПЛА.
Существо предлагаемого способа поясняется схемами, изображенными на фиг. 1 и 2. На фиг. 1 показана схема, поясняющая решение задачи определения на ДПЛА оптимального требуемого значения угла ориентации в вертикальной плоскости ПЗ СО ДПЛА. На фиг. 1 обозначено: А - положение ц.м. ДПЛА в вертикальной плоскости; ГА - положение оси гировертикали (ГВ) ДПЛА; АО - проекция оси ПЗ (ОПЗ) СО ДПЛА на вертикальную плоскость; АД - проекция дальней границы ПЗ СО на вертикальную плоскость; AC - проекция ближней границы ПЗ СО на вертикальную плоскость; ПА - проекция продольной оси (ПО) ДПЛА на вертикальную плоскость; θпо- угол ориентации ПО относительно оси ГВ; θ - угол ориентации ОПЗ СО относительно ПО ДПЛА; Добн - максимальная дальность обнаружения наземного объекта (НО) оператором НПУ; θо- угол ориентации ОПЗ СО ДПЛА относительно оси ГВ; Sб, Sобн, Sд - проекции соответственно прямых АС, Добн и АД на горизонтальную плоскость, проходящую через проекцию точки А на земную поверхность; V - скорость полета ДПЛА; Н - высота полета ДПЛА над земной (водной) поверхностью; Fпз - ширина угла ПЗ СО в вертикальной плоскости.
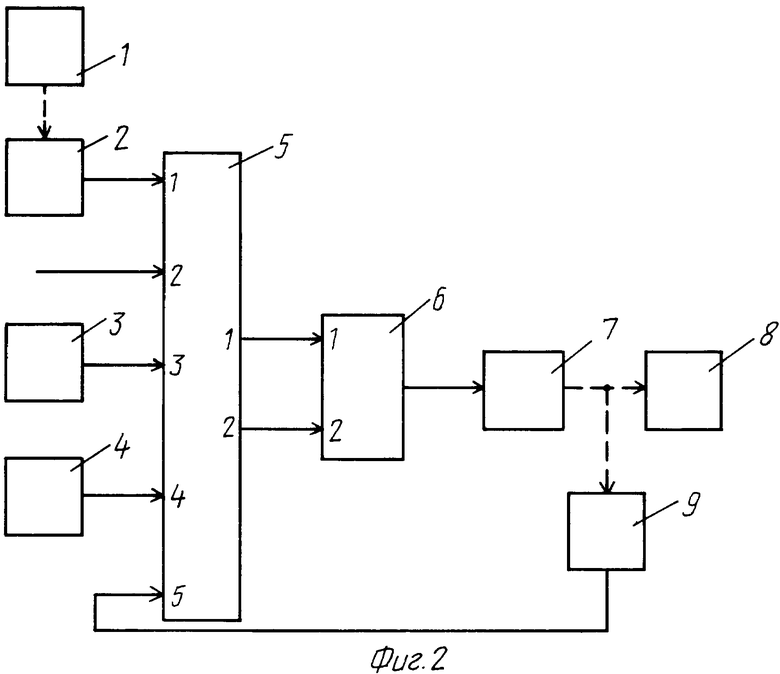
На фиг. 2 показана структурная схема возможного варианта устройства, реализующего предложенный способ. На фиг. 2 обозначено: 1 - гировертикаль (ГВ) ДПЛА; 2 - измеритель угла отклонения продольной оси ДПЛА в вертикальной плоскости (ИУПО); 3 - радиовысотомер (РВ) ДПЛА; 4 - измеритель скорости (ИС) ДПЛА; 5 - вычислитель (В) ДПЛА; 6 - суммирующий усилитель (СУ); 7 - привод (ПР); 8 - система обзора (СО) ДПЛА; 9 - измеритель угла отклонения СО в вертикальной плоскости (ИУСО).
Существо предлагаемого способа состоит в следующем. Предварительно в память вычислителя ДПЛА вводят: а) значение Fпз ширины угла ПЗ СО ДПЛА в вертикальной плоскости; б) максимальное значение Добн дальности обнаружения наземных объектов оператором НПУ; в) заданное значение dθо шага изменения угла.
На ДПЛА устанавливают СО с возможностью ее вращения относительно корпуса ДПЛА в вертикальной плоскости. В процессе полета ДПЛА на нем измеряют: а) текущее значение Н; б) текущее значение V; в) текущее значение θпо; г) текущее значение θ. Эти измеренные значения вводят в вычислитель ДПЛА, где с использованием их, а также предварительно введенных значений Добн, Fпз и dθо вычисляют:
1) текущее значение θо
θо= 180°- θпо- θ; (1)
2) текущее значение Sобн
3) оптимальное требуемое значение θоптр угла ориентации ОПЗ СО ДПЛА относительно оси ГВ в первом приближении θоптр(1). В качестве оптимального требуемого значения θоптр принимаем то значение угла ориентации ОПЗ СО ДПЛА относительно оси ГВ, при котором для НО, попавшего в ПЗ СО ДПЛА, обеспечивается при рассматриваемых условиях полета ДПЛА максимальное значение Тобнм времени его пребывания в ГВ СО на дальностях между НО и ДПЛА, не превышающих максимальной дальности Добн обнаружения НО оператором НПУ. Значение θоптр(1) определяется по формуле
θоптр(1) = θ0; (3)
4) значения Sб(1) и Sд(1) в первом приближении
Sб(1) = Н•tg(θоптр(1) - 0,5•Fпз), (4)
Sд(1) = Н•tg(θоптр(1) + 0,5•Fпз); (5)
5) сравнивают значения Sб(1) и Sд(1) с значением Sобн;
5.а) если
Sб(1) > Sобн,
то методом последовательных приближений вычисляют значение θоптр по следующему алгоритму
Sб(I+1) = H•tg(θоптр(I+1)-0,5•Fпз), (7)
Sд(I+1) = H•tg(θоптр(I+1)+0,5•Fпз); (8)
Tобн(I+1) = (Sобн-Sб(I+1))/V
при Sб(I+1)<Sобн и Sд(I+1)>Sобн, (9)
Tобн(I+1) = (Sд(I+1)-Sб(I+1))/V
при Sб(I+1)<Sобн и Sд(I+1)<Sобн, (10)
а при
Sб(I+1)>Sобн, (11)
не выполняя вычислений по формулам (9) и (10), следует перейти к вычислениям по формулам (6), (7) и (8) для следующего значения I.
Вычисления по этому алгоритму следует закончить на том шаге I+1, для которого выполняется неравенство
Тобн(I)>Тобн(I+1), (12)
и в качестве θоптр принять
θоптр= θоптр(I), (13)
5.б) если
Sд(1)<Sобн,
то методом последовательных приближений вычисляют значение θоптр по следующему алгоритму
Sб(I+1) = H•tg(θоптр(I+1) - 0,5•Fпз), (15)
Sд(I+1) = H•tg(θоптр(I+1) + 0,5•Fпз); (16)
Tобн(I+1) = (Sобн-Sб(I+1))/V
при Sб(I+1)>Sобн и Sд(I+1)<Sобн, (17)
Tобн(I+1) = (Sд(I+1)-Sб(I+1))/V
при Sб(I+1)>Sобн и Sд(I+1)>Sобн, (18)
а при
Sд(I+1)<Sобн, (19)
не выполняя вычислений по формулам (17) и (18), следует перейти к вычислениям по формулам (14), (15) и (16) для следующего значения I. Для окончания вычислений по этому алгоритму и определения значения θоптр следует пользоваться рекомендациями, изложенными выше в п. 5.а) (формулы (12) и (13));
5.в) если
Sд(1)>Sобн>Sб(1),
то необходимо выполнить вычисления по следующим формулам
Если
Тобн(2)>Тобн(1),
то дальнейшие вычисления для определения θоптр следует выполнять по алгоритму, изложенному в п.5.а). Если же
Тобн(2)<Тобн(1),
то продолжать вычисления для определения θоптр следует по алгоритму, изложенному в п.5.б).
Таким образом, предлагаемый способ позволяет выполнить все операции по определению требуемого значения угла ориентации ОПЗ СО ДПЛА в вертикальной плоскости на борту ДПЛА, чем и достигается цель изобретения.
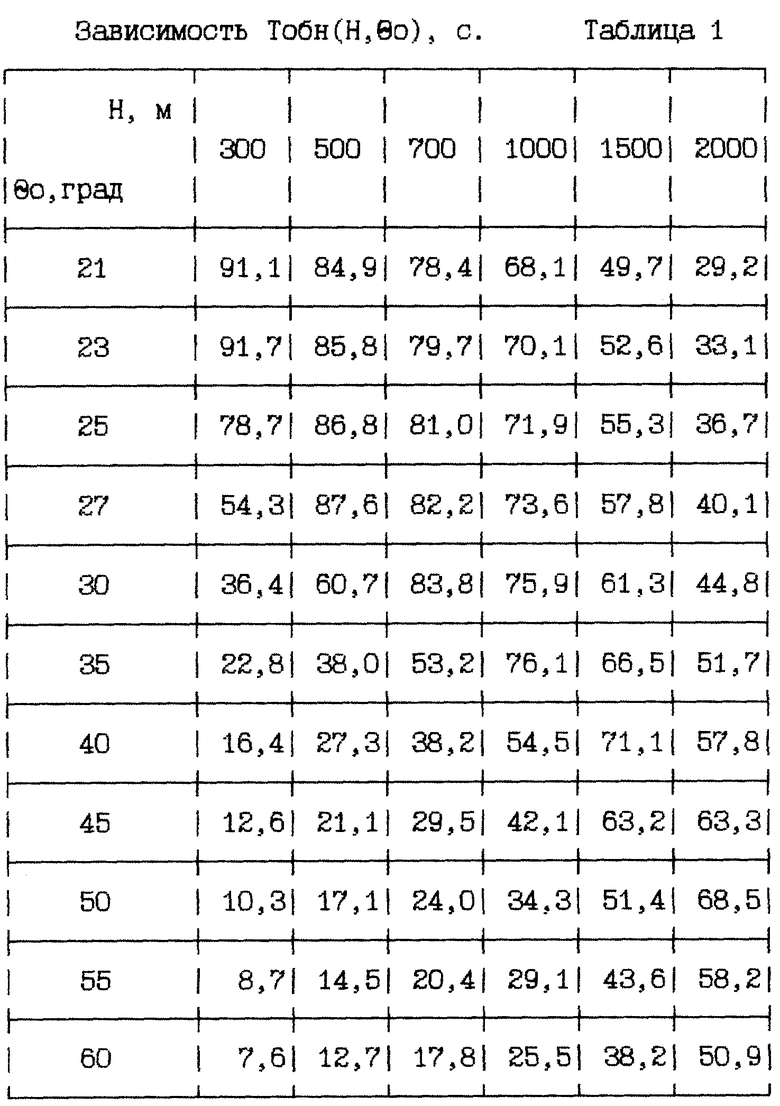
Причем полученное значение этого угла является оптимальным, так как при рассматриваемых условиях полета ДПЛА оно обеспечивает максимальное значение Тобнм времени пребывания в ПЗ СО попавшего в ПЗ СО наземного объекта (НО) на дальностях между ним и ДПЛА, не превышающих максимальной дальности Добн обнаружения НО оператором НПУ. В справедливости этого вывода убеждают результаты расчета зависимости Тобн(H,θo), проведенного по рассмотренному выше алгоритму, представленные в табл. 1. Расчеты проводились для следующих исходных данных:
Fпз=40 град.; Добн=4000 м; V=40 м/с.
Значения Н и θo варьировались в пределах, указанных в табл. 1.
Анализ данных, приведенных в табл. 1, позволяет найти оптимальные требуемые значения θоптр угла ориентации ОПЗ СО ДПЛА, обеспечивающие соответствующие значения Тобнм для соответствующих значений Н высоты полета ДПЛА, представленные в табл. 2.
Устройство, которое реализует предлагаемый способ, содержит (фиг. 2) ГВ 1, ИУПО 2, РВ 3, ИС 4, В 5, СУ 6, Пр 7, СО 8 и ИУСО 9, причем выход ГВ 1 механически связан с входом ИУПО 2, выход ИУПО 2 электрически связан с первым входом В 5, выход РВ 3 электрически связан с третьим входом В 5, выход ИС 4 электрически связан с четвертым входом В 5, первый выход В 5 электрически связан с первым входом СУ 6, второй выход В 5 электрически связан со вторым входом СУ 6, выход СУ 6 электрически связан с входом Пр 7, выход Пр 7 механически связан с СО 8 и входом ИУСО 9, выход ИУСО 9 электрически связан с пятым входом В 5, а второй вход В 5 электрически связан с выходом устройства ввода значений Добн, dθo и Fпз.
Работает это устройство следующим образом. Предварительно на второй вход В 5 подают значения Добн, dθo и Fпз и запоминают эту информацию в В 5. В ходе полета ДПЛА с помощью ГВ 1 и ИУПО 2 измеряют текущее значение θпо и подают его на первый вход В 5, с помощью РВ 3 измеряют текущее значение Н и подают его на третий вход В 5, с помощью ИС 4 измеряют текущее значение V и подают его на четвертый вход В 5, а с помощью ИУСО 9 измеряют текущее значение угла θ и подают его на пятый вход В 5. В В 5 на основе информации, поданной на его входы, по рассмотренному выше алгоритму (п.п. 1...8) вычисляют на борту ДПЛА значения θоптр и θo. С первого выхода В 5 значение θоптр подают на первый вход СУ 6, а со второго выхода В 5 значение θo подают на второй вход СУ 6. С выхода СУ 6 разность значений θоптр и θo подают на вход Пр 7, который поворачивает СО 8 в сторону уменьшения этой разности. При этом изменяется значение θ, которое измеряют с помощью ИУСО 9, и с выхода ИУСО 9 подают на пятый вход В 5. В результате этого процесса значение θo изменяется до совпадения его с значением θоптр.
Источники информации:
1. "Иностранная печать об экономическом, научно-техническом и военном потенциале государств-участников СНГ и технических средствах его выявления", серия "Технические средства разведывательных служб зарубежных государств". Ежемесячный информационный бюллетень,- М., N 7, 1999 г., стр. 3 и 4.
2. Федосов Е.А. (редактор), "Дистанционно пилотируемые летательные аппараты капиталистических стран" (Обзор по материалам иностранной печати). - М., Научно-информационный центр, 1989 г., стр. 53-64.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
| СПОСОБ РАДИООБМЕНА ИНФОРМАЦИЕЙ | 2000 |
|
RU2197065C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЦЕЛЬ | 2001 |
|
RU2204785C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ОБЛАСТИ ВОЗМОЖНОГО ПУСКА РАКЕТЫ | 2001 |
|
RU2206044C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2148795C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗНАЧЕНИЙ ПАРАМЕТРОВ ТРАЕКТОРИИ БОМБЫ | 2002 |
|
RU2212620C1 |
| СПОСОБ ПОВОРОТА УПРАВЛЯЮЩЕЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2193992C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208555C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |

Изобретение относится к способам ориентации в вертикальной плоскости (ВП) поля зрения (ПЗ) систем обзора (СО), устанавливаемых на дистанционно пилотируемых летательных аппаратах (ДПЛА). Целью изобретения является исключение возможности появления на ДПЛА ошибки в требуемом значении угла ориентации ПЗ СО в ВП. Это достигается тем, что в вычислитель (В), установленный на ДПЛА, предварительно вводят и запоминают значения ширины Fпз ПЗ СО в ВП, максимальной дальности Добн обнаружения наземного объекта (НО) оператором наземного пункта управления (НПУ), получающего информацию от СО, и шага dθo изменения угла, в процессе полета ДПЛА на нем измеряют текущие значения скорости V и высоты Н его полета над земной поверхностью, угла θпo ориентации его продольной оси (ПО) относительно оси гировертикали (ГВ) и угла θ ориентации СO относительно ПО, вводят эти измеренные значения в В, где с использованием значений Fпз, Добн, dθo, Н, V, θпo и θ вычисляют текущее θo значение угла ориентации ПЗ СО относительно оси ГВ и оптимальное требуемое θоптр значение этого угла, сравнивают значения θo и θоптр и поворачивают СО в ВП до совпадения значения θo с значением θоптр. 2 табл., 2 ил.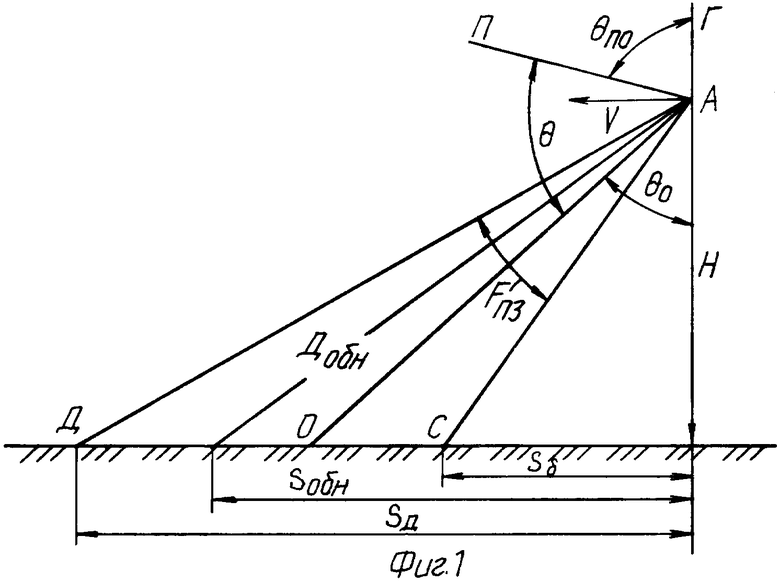
Способ ориентации в вертикальной плоскости поля зрения системы обзора, который состоит в том, что на дистанционно пилотируемом летательном аппарате устанавливают систему обзора, содержащую одну обзорную камеру, с возможностью ее поворота в вертикальной плоскости относительно этого летательного аппарата, на этом летательном аппарате в процессе его полета измеряют текущее значение угла ориентации поля зрения системы обзора относительно продольной оси этого аппарата в вертикальной плоскости, отличающийся тем, что в вычислитель, установленный на этом летательном аппарате, предварительно вводят и запоминают значения ширины поля зрения системы обзора в вертикальной плоскости, максимальной дальности обнаружения наземного объекта оператором наземного пункта управления, получающего информацию от системы обзора, и шага изменения угла, в процессе полета летательного аппарата на нем измеряют текущие значения скорости и высоты его полета над земной поверхностью, а также угла ориентации его продольной оси относительно оси установленной на нем гировертикали, вводят эти измеренные значения в этот вычислитель, где с использованием введенных значений вычисляют текущее и оптимальное требуемое значения угла ориентации поля зрения системы обзора относительно оси гировертикали в вертикальной плоскости, сравнивают текущее и оптимальное требуемое значения этого угла в этой плоскости и поворачивают систему обзора в этой плоскости до совпадения этих значений этого угла.
| СТАБИЛИЗИРОВАННОЕ ТЕПЛОВИЗИОННОЕ УСТРОЙСТВО НАВЕДЕНИЯ | 1995 |
|
RU2099750C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
| WO 00/02062, 13.01.2000 | |||
| DE 3812984 С1, 18.07.1991 | |||
| DE 4130617 С1, 11.02.1993 | |||
| СПОСОБ РАБОТЫ ПИКОВОЙ ВОДОГРЕЙНОЙ КОТЕЛЬНОЙ | 2000 |
|
RU2184313C1 |
| US 6057536, 02.05.2000. | |||

