Изобретение относится к способам дистанционного определения координат местоположения наземного объекта (НО) и может быть использовано при создании новых и модернизации существующих систем определения координат местоположения НО с помощью дистанционно пилотируемых летательных аппаратов (ДПЛА).
Известен способ дистанционного определения координат местоположения НО с помощью ДПЛА [1], состоящий в том, что на ДПЛА устанавливают систему обзора (СО) из четырех телевизионных камер (ТК), поле зрения которых стабилизируют только по углу крена ДПЛА и с помощью которых получают на ДПЛА сигналы телевизионного изображения (СИ) земной поверхности под ДПЛА и впереди него почти до линии горизонта, и приемник сигналов глобальной спутниковой навигационной системы (ПССН), с помощью которого на ДПЛА определяют координаты (географические широту Wдп и долготу Qдп) местоположения (КМ) ДПЛА, передают СИ и КМ на наземный пункт (НП), где отображают СИ и местоположение ДПЛА на комбинированном (карта/изображение) индикаторе, в результате наблюдения отображения СИ обнаруживают и опознают НО, формируют сигналы такого изменения траектории (СИТ) полета ДПЛА, при котором он пройдет над НО, передают СИТ с НП на ДПЛА и определяют КМ НО как КМ ДПЛА в момент прохода ДПЛА над НО. Недостатком этого способа является значительная задержка между временем обнаружения НО и временем определения координат НО в том случае, когда обнаружение НО происходит при нахождении его вблизи боковой границы поля зрения ТК, что обусловлено временем, которое необходимо ДПЛА для выполнения маневра, в результате которого ДПЛА пройдет над НО.
Известен также способ дистанционного определения координат местоположения НО [2], который состоит в том, что на ДПЛА устанавливают СО в кардановом подвесе (КП) с возможностью ее вращения относительно осей КП, магнитный компас (МК), гировертикаль (ГВ), барометрический высотомер (БВ) и лазерный дальномер (ЛД), в полете на ДПЛА стабилизируют положение КП с помощью ГВ, с помощью радиосигналов от наземного пункта (НП) управляют положением оси поля зрения (ОПЗ) СО и направляют ОПЗ на НО, получают СИ участка местности, находящегося в поде зрения (ПЗ) СО, измеряют угол Fo ориентации ОПЗ СО относительно вертикали и угол So ориентации ОПЗ СО в горизонтальной плоскости относительно направления магнитного курса ДПЛА, с помощью ЛД измеряют на ДПЛА значение дальности Д между ДПЛА и НО, а с помощью МК и БВ измеряют на ДПЛА соответственно значения угла Кмо магнитного курса и высоты Н полета ДПЛА над уровнем моря, с помощью ГВ измеряют на ДПЛА значение угла Fпo ориентации оси ДПЛА относительно вертикали, передают по каналу связи с ДПЛА на НП значения Fo, Sо и Д, а также СИ, на НП принимают значения Fo, So и Д, а также СИ, отображают СИ на экране индикатора, наблюдают это отображение СИ и обнаруживают и опознают на отображении НО, сопровождают ДПЛА радиолокационной станцией НП и в результате этого определяют значения дальности Дл между ДПЛА и НП и углов ориентации направления с НП на ДПЛА и с использованием значений этих углов, а также значений Дл, Fo, So, Д вычисляют на НП значения универсальных прямоугольных меркаторских координат местоположения НО. Недостатком этого способа является большая масса установленного на ДПЛА оборудования и значительные затраты потребляемой этим оборудованием энергии бортового источника электроэнергии ДПЛА, которые обусловлены тем, что в этом способе весь объем сложных задач по определению координат НО относительно ДПЛА нужно решать на борту ДПЛА.
Прототипом заявляемого изобретения следует считать способ дистанционного определения местоположения НО [2] , общим признаком которого с заявляемым изобретением является то, что в нем на ДПЛА устанавливают СО, МК, ГВ и БВ, в полете на ДПЛА с помощью СО получают СИ участка местности, который находится в поле зрения СО, с помощью МК и БВ измеряют на ДПДА соответственно значения угла Кмо магнитного курса и высоты Н полета ДПДА над уровнем моря, с помощью ГВ измеряют на ДПЛА значение угла Fпo ориентации оси ДПЛА относительно вертикали, передают по каналу связи с ДПЛА на НП значения Н и Fо, а также СИ, на НП принимают значения Н, Fо, a также СИ, отображают СИ на экране индикатора, наблюдают это отображение СИ и обнаруживают и опознают НО на отображении СИ.
Кроме того, в прототипе на ДПЛА устанавливают СО в КП с возможностью ее вращения относительно осей КП, а также ЛД, в полете на ДПЛА стабилизируют положение КП с помощью ГВ, с помощью радиосигналов от НП управляют положением ОПЗ СО, направляют ОПЗ СО на НО, измеряют угол Fо ориентации ОПЗ СО относительно вертикали и угол Sо ориентации ОПЗ СО в горизонтальной плоскости относительно направления магнитного курса ДПЛА, с помощью ЛД измеряют на ДПЛА значение дальности Д между ДПЛА и НО, передают по каналу связи с ДПЛА на НП значения Sо и Д, на НП принимают значения Sо и Д, сопровождают ДПЛА радиолокационной станцией НП и в результате этого определяют значения дальности Дл между ДПЛА и НП и углов ориентации направления с НП на ДПЛА и с использованием значений этих углов, а также значений Дл, Fо, Sо, Д вычисляют на НП значения универсальных прямоугольных меркаторских координат местоположения НО.
Недостатком прототипа является большая масса установленного на ДПЛА оборудования и значительные затраты потребляемой этим оборудованием энергии бортового источника электроэнергии, которые обусловлены тем, что в прототипе весь объем сложных задач по определению координат НО относительно ДПЛА требуется решать на борту ДПЛА. Действительно, в прототипе необходимо измерять дальность Д между НО и ДПЛА. Для решения этой задачи на борту ДПЛА устанавливают лазерный дальномер, обладающий сравнительно большой массой и требующий для своей работы значительных затрат энергии бортового источника электроэнергии. Кроме того, в прототипе в полете на ДПЛА с помощью радиосигналов от НП управляют положением ОПЗ СО ДПЛА, направляют ОПЗ на НО и измеряют углы Fо и Sо ориентации ОПЗ СО, направленной на НО. Решение этих задач требует установки СО на ДПЛА в кардановом подвесе, оснащения ДПЛА радиоприемником сигналов управления положением ОПЗ СО и приводными устройствами, изменяющими положение ОПЗ СО в соответствии с принятыми сигналами управления. Все указанные устройства также обладают сравнительно большой массой и требуют для своей работы существенных затрат энергии бортового источника электроэнергии.
Целью заявляемого изобретения является устранение указанного недостатка прототипа, а именно уменьшение массы оборудования, устанавливаемого на ДПЛА, и затрат потребляемой этим оборудованием энергии бортового источника электроэнергии.
Эта цель достигается тем, что в заявляемом изобретении значительная часть задач, связанных с определением координат НО относительно ДПЛА, решается не на ДПЛА, а на НП в результате обработки отображения СИ, принятых от ДПЛА, на экране индикатора НП.
Существо предлагаемого способа поясняется схемами, изображенными на фиг. 1 - 4. На фиг.1 показаны схемы и параметры участка местности, который находится в данный момент в поле зрения СО ДПЛА, для вертикальной и горизонтальной плоскостей. На фиг.1, а) показаны схемы и параметры этого участка в вертикальной плоскости М, проходящей через продольную ось ДПЛА (пунктирные линии), и для вертикальной плоскости R, проходящей через центр массы (ц.м.) ДПЛА (точка А) и точку Ц положения НО на земной поверхности (сплошные линии). На фиг. 1, б) показаны схема и параметры этого участка для горизонтальной плоскости N, которая проходит через точку А - проекцию ц.м. ДПЛА на земную поверхность (сплошные линии), а также ближняя и дальняя относительно ДПЛА границы этого участка на земной поверхности с учетом ее рельефа (соответственно пунктирные линии V и U).
На фиг. 1 обозначено: А - положение ц.м. ДПЛА в вертикальной плоскости; ГМ - географический меридиан; MM - магнитный меридиан; А' - проекция ц.м. ДПЛА на земную поверхность; ПА' - проекция направления продольной оси ДПЛА на горизонтальную плоскость N, проходящую через точку А; Ц - положение ц.м. НО на земной поверхности; АД - дальняя граница ПЗ СО в плоскости R; AC - ближняя граница ПЗ СО в плоскости R; АО - ОПЗ СО в плоскости И; С - точка пересечения ближней границы ПЗ СО с земной поверхностью в плоскости R; Д - точка пересечения дальней границы ПЗ CO с земной поверхностью в плоскости R; В, Е, F - точки пересечения соответственно прямых АЦ, АД и АС с плоскостью N; Е', В', Ц', F' - проекции соответственно точек Е, В, Ц, F на линию пересечения плоскостей R и N; А'СЦД - рельеф местности по линии пересечения плоскостей R и N; УрМ - уровень моря; Н - высота полета ДПЛА над уровнем моря; Sц - угол ориентации прямой А'Ц относительно ПА'; Fо - угол ориентации ОПЗ СО относительно вертикали; Fпо - угол отклонения продольной оси ДПЛА от вертикали; Fтк - угол отклонения ОПЗ СО от продольной оси ДПЛА; Fпзу - ширина угла ПЗ (УПЗ) СО в вертикальной плоскости; Fпза - ширина УПЗ СО в горизонтальной плоскости; Дгц - дальность между НО и ДПЛА в горизонтальной плоскости; Fц - угол ориентации направления с ДПЛА на НО относительно вертикали в вертикальной плоскости R; G - угол магнитного склонения; Кмо - магнитный курс продольной оси ДПЛА; U - проекция на плоскость N ближней относительно ДПЛА границы участка земной поверхности, находящегося в GP СО, с учетом рельефа местности на этом участке; V - проекция на плоскость N дальней относительно ДПЛА границы участка земной поверхности, находящегося в ПЗ СО, с учетом рельефа местности на этом участке; ГП - линия пересечения горизонтальной плоскости, проходящей через точку А, с вертикальной плоскостью; ПО - продольная ось ДПЛА; Нра - высота рельефа местности над уровнем моря в точке А; Sгц - угол ориентации направления на НО в горизонтальной плоскости относительно географического меридиана.
На фиг. 2 показана схема экрана индикатора НП с отображением СИ участка местности, находящегося в ПЗ СО, и НО, который находится на этом участке. На фиг.2 обозначено: Оно - отображение НО на экране индикатора; Lд - ширина отображения по дальности участка местности, находящегося в ПЗ СО, на экране индикатора; Lдц - координата отображения положения НО по дальности на экране индикатора НП; La - ширина отображения по азимуту участка местности, находящегося в ПЗ СО, на экране индикатора; Lац - координата отображения положения НО по азимуту на экране индикатора НП; Lио - отображение на экране индикатора НП проекции ОПЗ СО на горизонтальную плоскость.
На фиг. 3 показана блок-схема алгоритма вычисления координаты местоположения наземного объекта вычислителем наземного пункта. На фиг.3 обозначено: 1 - блок исходной информации, которую вводят в вычислитель наземного пункта предварительно и в процессе полета ДПЛА; ⊗ - блок суммирования;  блок умножения;
блок умножения;  блок деления;
блок деления;  блок вычисления функции "синус";
блок вычисления функции "синус";  блок вычисления функции "косинус";
блок вычисления функции "косинус";  блок вычисления функции "тангенс";
блок вычисления функции "тангенс";  блок вычисления функции "арктангенс";
блок вычисления функции "арктангенс";  блок вычисления функции "корень квадратный";
блок вычисления функции "корень квадратный";  блоки вычисления высот Нра и Нрв рельефа местности соответственно в точках А и В по формулам 3), 4), 5) и 14), 15), 16), приведенным ниже;
блоки вычисления высот Нра и Нрв рельефа местности соответственно в точках А и В по формулам 3), 4), 5) и 14), 15), 16), приведенным ниже;  блок вычисления высоты Нрр рельефа местности в точке Р по формулам 17), 18), 19), приведенным ниже;
блок вычисления высоты Нрр рельефа местности в точке Р по формулам 17), 18), 19), приведенным ниже;  блок вычисления расстояния Lт между точками В и Р по направлению прямой АВ. Остальные обозначения на фиг.3 аналогичны соответствующим обозначениям на фиг.1 и фиг.2, а также обозначениям, которые использованы в приведенных ниже формулах (2)...(24).
блок вычисления расстояния Lт между точками В и Р по направлению прямой АВ. Остальные обозначения на фиг.3 аналогичны соответствующим обозначениям на фиг.1 и фиг.2, а также обозначениям, которые использованы в приведенных ниже формулах (2)...(24).
На фиг. 4 показана структурная схема возможного варианта устройства, реализующего предложенный способ. На фиг.4 обозначено: 1 - приемник сигналов системы спутниковой навигации (ПССН); 2 - барометрический высотомер (БВ) ДПЛА; 3 - измеритель угла отклонения (ИУО) СО от продольной оси ДПЛА в вертикальной плоскости; 4 - гировертикаль (ГВ) ДПЛА; 5 - система обзора (СО) ДПЛА; 6 - магнитный компас (МК); 7 - вычислитель (В); 8 - передатчик канала связи (ПрКС) ДПЛА; 9 - приемник канала связи (ПКС) наземного пункта (НП); 10 - индикатор (И) НП; 11 - вычислитель (ВЧ) НП; ЦК - цифровая карта местности заданного района полета ДПЛА; Wдп, Qдп - географические широта и долгота местоположения ДПЛА; СИ - сигналы изображения на выходе СО; Hp(W,Q) - зависимость высоты Нр над уровнем моря рельефа точек местности от географических широты W и долготы Q местоположения этих точек; Wц, Qц - значения географических широты и долготы местоположения НО. Остальные обозначения на фиг.4 аналогичны соответствующим обозначениям на фиг.1 - 3. Пунктирной линией ограничены устройства, которые установлены на борту ДПЛА.
Существо предлагаемого способа состоит в следующем. Предварительно в память ВЧ НП вводят: а) ЦК местности района, где запланирован полет ДПЛА, границами которого являются точки с заданными географическими координатами Wmin, Qmin; Wmin, Qmax; Wmax, Qmin; Wmax, Qmax; б) зависимость Hp(W, Q) высоты Нр над уровнем моря точек рельефа местности в этом районе от значений географических широты W и долготы Q местоположения этих точек в виде матрицы Hp(Wi,Qj) (i=1, 2,..., Т; j=1, 2,..., S) высот над уровнем моря точек рельефа местности в зависимости от заданных значений географических широты Wi и долготы Qj местоположения этих точек с заданным шагом матрицы по широте dW, заданным шагом матрицы по долготе dQ и заданными значениями Т и S.
Т = (Wmax-Wmin)/dW; S = (Qmax-Qmin)/dQ;
в) параметры Ар и Ер референц-эллипсоида Земли; г) угол G магнитного склонения; д) значения Fпзу, Fпза, Lд, La.
На ДПЛА устанавливают СО с возможностью ее вращения в вертикальной плоскости, причем положение СО в ходе полета ДПЛА стабилизируют по углу крена ДПЛА так, чтобы ОПЗ СО при любом значении угла крена ДПЛА находилась в вертикальной плоскости, проходящей через продольную ось ДПЛА. На ДПЛА также устанавливают ПССН, магнитный компас (МК), гировертикаль (ГВ), измеритель угла отклонения (ИОУ) СО от продольной оси ДПЛА и барометрический высотомер (БВ). На ДПЛА в полете с выхода СО получают СИ участка земной поверхности, который находится в ПЗ СО, а с помощью ПССН определяют значения Wдп, Qдп географических координат текущего местоположения ДПЛА. Кроме того, на ДПЛА измеряют: текущее значение Н высоты полета ДПЛА над уровнем моря с помощью БВ, текущее значение Fтк угла отклонения ОПЗ СО от продольной оси ДПЛА в вертикальной плоскости с помощью ИОУ, текущее значение Fпo угла отклонения продольной оси ДПЛА от вертикали с помощью ГВ и текущее значение Кмо магнитного курса продольной оси ДПЛА с помощью МК. По результатам измерений на ДПЛА вычисляют текущее значение Fo угла отклонения ОПЗ СО от вертикали по формуле
Fo=Fпo-Fтк. (1)
Полученные значения Wдп, Qдп, Н, Fo и Кмо, а также СИ передают по каналу связи на НП. Принятые на НП значения Wдп, Qдп, Н, Fo, Кмо вводят в ВЧ НП, а принятые на НП СИ подают на вход индикатора НП и отображают СИ на экране этого индикатора. Наблюдая СИ на экране индикатора, обнаруживают и опознают интересующий НО, после чего по экрану индикатора измеряют текущие значения Lдц и Laц координат отображения местоположения НО на экране индикатора и вводят эти значения в ВЧ НП.
С использованием введенной информации в ВЧ НП вычисляют:
1) угол Sц между прямыми АЕ и ПА, который в соответствии со схемами, показанными на фиг.1, б) и фиг.2, определяют по формуле
Sц = Fпза•Laц/La; (2)
2) высоту Нра над уровнем моря рельефа местности в точке А с координатами Wдп, Qдп, которую определяют с использованием матрицы Hp(Wi, Qj) (i=1, 2,..., Т; j=1, 2,..., S) в результате анализа прямого многогранника, основанием которого является прямоугольник, длина сторон которого равна
dW = Wi+1-Wi,
dQ = Qj+1-Qj,
а длина вертикальных ребер равна Hp(Wi, Qj), Hp(Wi+1, Qj), Hp(Wi, Qj+1) и Hp(Wi+1, Qj+l), по следующему алгоритму
Нра = Hp(Wi, Qj)+Lтa•tgFa, (3)
где Hp(Wг, Qj+1) = Hp(Wi, Qj+1)+(Hp(Wi+1, Qj+1)-Hp(Wi, Qj+1))•(Wг-Wi)/dW,
Wг = Wi+(Wдп-Wi)•dQ/(Qдп-Qj),
Hp(Wi+1, Qг) = Hp(Wi+1, Qj)+(Hp(Wi+1, Qj+1)-Hp(Wi+1, Qj))•(Qг-Qj)/dQ, Qг = Qj+(Qдп-Qj)•dW/(Wдп-Wi);
3) высоту На полета ДПЛА над рельефом местности в точке А, которую на основе анализа схемы (фиг.1, а) определяют по формуле
На = Н-Нра; (6)
4) длины Lаф и Lae соответственно отрезков A F и А Е, которые в соответствии со схемой (фиг.1, а) определяют по формулам
Lаф = На•tg(Fo-0,5•Fпзy), (7)
Lae = На•tg(Fo+0,5•Fпзy);
5) длину Lав отрезка А В, которую в соответствии со схемами, показанными на фиг.1 и 2 определяют по формуле
Laв = (Lae-Laф)•Lдц/Lд; (8)
6) значение тангенса угла Fц, которое в соответствии со схемой (фиг.1, а) определяют по формуле
tg(Fц) = Laв/На; (9)
7) значение угла Fц, которое в соответствии с выражением (9) вычисляют по формуле
Fц = arctg(Laв/На); (10)
8) значение угла Sгц, которое на основе анализа схемы, показанной на фиг.1, б), определяют по формуле
Sгц = Кмо+G+Sц; (11)
9) географические широту Wв и долготу Qв точки В, которые определяют по формулам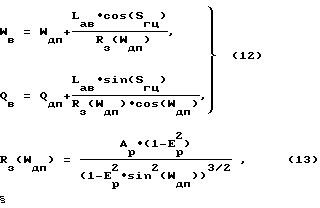
где Ар, Ер - известные значения большой полуоси и эксцентриситета референц-эллипсоида;
10) высоту над уровнем моря Нрв рельефа местности в точке В с координатами Wв, Qв, которую определяют с использованием матрицы Hp(Wi, Qj) (i=1, 2,..., Т; j=1, 2,..., S) в результате анализа прямого многогранника, основанием которого является прямоугольник с длинами сторон
dW = Wi+n+1-Wi+n,
dQ = Qj+m+1-Qj+m,
а длина вертикальных ребер равна
Hp(Wi+n, Qj+m), Hp(Wi+n+1, Qj+m),
Hp(Wi+n, Qj+m+1), Hp(Wi+n+1, Qj+m+1),
где n - количество отрезков длиной dW между отрезком, в котором находится координата Wдп, и отрезком, в котором находится координата Wв; m - количество отрезков длиной dQ между отрезком, в котором находится координата Qдп, и отрезком, в котором находится координата Qв. Высоту Нрв вычисляют по следующему алгоритму
Нрв = Hp(Wi+n, Qj+m)+Lтв•tgFв, (14)
где Hp(Wr, Qj+m+1) = Hp(Wi+n, Qj+m+1)+(Hp(Wi+n+1, Qj+m+1)-Hp(Wi+n, Qj+m+1))•(Wг-Wi+n)/dW,
Wr = Wi+n+(Wв-Wi+n)•dQ/(Qв-Qj+m),
Hp(Wi+n+1, Qr) = Hp(Wi+n+1, Qj+m)+(Hp(Wi+n+1, Qj+m+1)-Hp(Wi+n+1, Qj+m))•(Qr-Qj+m)/dQ,
Qг = Qj+m+(Qв-Qj+m)•dW/(Wв-Wi+n);
11) высоту над уровнем моря Нрр рельефа местности в точке Р пересечения прямой А В верхних ребер боковых граней многогранника, рассмотренного в п. 9), которую определяют с использованием матрицы Hp(Wi, Qj) (i=1, 2,..., Т; j= 1, 2,..., S) в результате анализа прямого многогранника, рассмотренного в п.9). Высоту Нрр вычисляют по следующему алгоритму
где Wpp = Wв+(Wв-Wдп)•(Qв-Qj+m)/(Qв-Qдп),
Qpp = Qв+(Qв-Qдп)•(Wi+n+1-Wв)/(Wв-Wдп);
12) угол наклона Аав линейной зависимости Нрв(Lав) высоты рельефа местности в точке В вдоль прямой линии А В, который определяют по следующему алгоритму
Аав = arctg((Hpp-Нрв)/Lт), (20)
13) превышение dHpвa рельефа местности в точке В над высотой Нра рельефа в точке А
dHpвa = Нрв-Нра; (22)
14) значение удаления Дгц точки Ц местоположения НО от точки А в горизонтальной плоскости, которое вычисляют по формуле
Дгц = (На-dHpвa•sin(Аав)•sin(Fц)/соs(Аав+Fц))•tg(Fц), (23)
получаемую в результате анализа схемы (фиг.1, а);
15) значения географических широты Wц и долготы Qц местоположения НО, которые определяют по формулам
Блок-схема алгоритма вычисления координат Wц, Qц наземного объекта вычислителем наземного пункта в соответствии с приведенными выше формулами (2)...(24) показана на фиг.3.
Таким образом, предлагаемый способ обеспечивает дистанционное определение координат местоположения НО с использованием ДПЛА при выполнении основного объема операций по решению этой задачи не на ДПЛА, а на НП. В частности, в предлагаемом способе не нужно измерять на ДПЛА дальность между ДПЛА и НО, а следовательно, на ДПЛА в отличие от прототипа не требуется устанавливать лазерный дальномер, в результате чего существенно уменьшается масса оборудования, устанавливаемого на ДПЛА, и затраты потребляемой этим оборудованием энергии бортового источника электроэнергии, чем и достигается цель изобретения.
Устройство, которое реализует предлагаемый способ, содержит (фиг.4) НС 1 с ПССН, БВ 2, ИУО 3, ГВ 4, СО 5, МК 6, В 7, ПрКС 8, ПКС 9, И 10, ВЧ 11, причем первый и второй выходы НС 1 связаны соответственно с первым и вторым входами ПрКС 8, выход БВ 2 связан с третьим входом ПрКС 8, выход ИУО 3 связан с первым входом В 7, выход ГВ 4 связан со вторым входом В 7, выход В 7 связан с четвертым входом ПрКС 8, выход СО 5 связан с пятым входом ПрКС 8, выход МК 6 связан с шестым входом ПрКС 8, первый выход ПКС 9 связан с первым входом ВЧ 11, второй выход ПКС 9 связан со вторым входом ВЧ 11, третий выход ПКС 9 связан с третьим входом ВЧ 11, четвертый выход ПКС 9 связан с четвертым входом ВЧ 11, пятый выход ПКС 9 связан с пятым входом ВЧ 11, шестой выход ПКС 9 связан с первым входом И 10, первый выход И 10 связан с шестым входом ВЧ 11, второй выход И 10 связан с седьмым входом ВЧ 11, восьмой вход ВЧ 11 связан с выходом устройства ввода ЦК, девятый вход ВЧ 11 связан с выходом устройства ввода матрицы Hp(W,Q), десятый вход ВЧ 11 связан с выходом устройства ввода G, Lд и La, одиннадцатый вход ВЧ 11 связан с выходом устройства ввода значений Ар и Ер, первый и второй выходы ВЧ 11 связаны с соответствующими входами потребителей значений Wц и Qц.
Работает это устройство следующим образом. Предварительно на восьмой, девятый, десятый и одиннадцатый входы ВЧ 11 подают соответственно ЦК, Hp(W, Q), G, Lд, La, Ар, Ер и запоминают эту информацию в ВЧ 11. В ходе полета ДПЛА с помощью НС 1 определяют значения Wдп и Qдп и подают их соответственно на первый и второй входы ПрКС 8, с помощью БВ 2 измеряют значение Н и подают его на третий вход ПрКС 8, с помощью ИУО 3 измеряют значение угла Fтк и подают его на первый вход В 7, с помощью ГВ 4 измеряют значение угла Fпo и подают его на второй вход В 7, с помощью В 7 вычисляют значение угла Fo и подают его на четвертый вход ПрКС 8, с помощью СО 5 получают СИ и подают его на пятый вход ПрКС 8, с помощью МК 6 измеряют значение угла Кмо и подают его на шестой вход ПрКС 8. Информацию, поданную на указанные входы ПрКС 8, передают с ДПЛА на НП и принимают на НП с помощью ПКС 9. Принятые значения Н, Fo, Wдп, Qдп и Кмо с соответствующих выходов ПКС 9 подают на соответствующие входы ВЧ 11. Принятые СИ подают на первый вход И 10. Информацию, поступившую на вход И 10, отображают на экране индикатора И 10, наблюдают это отображение, обнаруживают и опознают на этом отображении интересующий НО и измеряют координаты Lдц, Lац местоположения отображения НО на экране И 10. Измеренные значения Lдц и Lац с соответствующих выходов И 10 подают на соответствующие входы ВЧ 11. С помощью ВЧ 11 на основе информации, которую подают на входы ВЧ 11, по рассмотренному выше алгоритму (2)...(22) вычисляют на НП значения географических широты Wц и долготы Qц местоположения НО.
Источники информации:
1. "Иностранная печать об экономическом, научно-техническом и военном потенциале государств-участников СНГ и технических средствах его выявления", серия "Технические средства разведывательных служб зарубежных государств". Ежемесячный информационный бюллетень, - М., 7, 1999 г., стр. 3-4.
2. Е.А. Федосов (редактор), "Дистанционно пилотируемые летательные аппараты капиталистических стран" (Обзор по материалам иностранной печати), - М. , Научно-информационный центр, 1989 г., стр. 53-64.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2148795C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ РАДИООБМЕНА ИНФОРМАЦИЕЙ | 2000 |
|
RU2197065C2 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА НА ЦЕЛЬ | 1997 |
|
RU2117312C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯ ЗРЕНИЯ СИСТЕМЫ ОБЗОРА | 2000 |
|
RU2183023C2 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЦЕЛЬ | 2001 |
|
RU2204785C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО (НАДВОДНОГО) ОБЪЕКТА | 2020 |
|
RU2749194C1 |
Изобретение относится к способам дистанционного определения координат местоположения наземного объекта (НО) с использованием дистанционно пилотируемых летательных аппаратов (ДПЛА). Достигаемым техническим результатом изобретения является уменьшение массы оборудования, устанавливаемого на ДПЛА, и затрат потребляемой энергии бортового источника электроэнергии. Это достигается тем, что с помощью системы обзора (СО), установленной на ДПЛА с возможностью поворота в вертикальной плоскости и стабилизированной по крену, получают сигналы изображения (СИ) участка местности (М), находящегося в поле зрения (ПЗ) СО. Кроме того, на ДПЛА определяют географические широту (ГШ) Wдп и долготу (ГД) Qдп его местоположения (МП), высоту Н полета над уровнем моря, магнитный курс Кмо его продольной оси и угол Fo отклонения оси ПЗ СО от вертикали. По каналу связи с ДПЛА передают СИ, Wдп, Qдп, Н, Кмо, Fo на наземный пункт (НП), где получают эту информацию, отображают СИ на экране (Э) индикатора НП, а остальную информацию вводят в вычислитель (В) НП. Предварительно в В вводят цифровую карту района, в котором запланирован полет ДПЛА, зависимость Нр (W, Q) высоты Нр точек рельефа М от их ГШ W и ГД Q, угол G магнитного склонения, параметры Ар, Ер зависимости Rз (W) радиуса Rз референц-эллипсоида Земли от ГШ, а также параметры ПЗ СО и Э, обнаруживают и опознают НО, измеряют координаты отображения (КО) НО и вводят КО в В, где с использованием всей введенной информации вычисляют значения географических координат Wц и Qц местоположения НО. 4 ил.
Способ дистанционного определения координат местоположения наземного объекта, который состоит в том, что на дистанционно пилотируемом летательном аппарате устанавливают систему обзора с возможностью ее поворота в вертикальной плоскости, приемник системы спутниковой навигации, магнитный компас, гировертикаль, измеритель угла отклонения системы обзора от продольной оси этого летательного аппарата и барометрический высотомер, в полете этого аппарата на нем стабилизируют систему обзора по углу крена этого аппарата, с помощью системы обзора получают сигналы изображения участка местности, находящегося в поле зрения этой системы, определяют значения Кмо магнитного курса, высоты Н полета над уровнем моря, значения географических широты Wдп и долготы Qдп местоположения этого аппарата и значение Fо угла ориентации поля зрения системы обзора относительно вертикали, по каналу связи передают с этого аппарата на наземный пункт значения Н, Wдп, Qдп и Fо, а также сигналы изображения участка местности, находящегося в поле зрения системы обзора, принимают на этом пункте значения Н, Wдп, Qдп, Fо, а также сигналы изображения этого участка местности, отображают эти сигналы изображения на экране индикатора наземного пункта, наблюдают это отображение и обнаруживают и опознают наземный объект на этом отображении, отличающийся тем, что в вычислитель этого пункта предварительно вводят цифровую карту местности района, в котором запланирован полет этого аппарата, зависимость Hp(W, Q) высоты Нр над уровнем моря точек рельефа местности в этом районе от значений географических широты W и долготы Q этих точек, угол G магнитного склонения в этом районе, значения большой полуоси Ар и эксцентриситета Ер референц-эллипсоида Земли, а также значения ширины Fпзу поля зрения системы обзора по углу места, ширины Fпза поля зрения этой системы по азимуту, максимальной длины Lд и максимальной ширины Lа отображения изображения этого участка местности на экране индикатора, на наземном пункте измеряют координаты Lдц и Lац отображения местоположения наземного объекта на этом экране и вводят эти координаты в вычислитель, вводят в этот вычислитель также полученные от этого аппарата значения Н, Wдп, Qдп и Fо и с использованием информации, введенной в вычислитель предварительно и в процессе полета этого аппарата, вычисляют на наземном пункте значения географических широты Wц и долготы Qц местоположения наземного объекта.
| Дистанционно пилотируемые летательные аппараты капиталистических стран (Обзор по материалам иностранной печати/Под ред | |||
| Е.А | |||
| ФЕДОСОВА | |||
| - М.: Научно-информационный центр, 1989, с | |||
| Веникодробильный станок | 1921 |
|
SU53A1 |
| 0 |
|
SU163346A1 | |
| US 4910526, 20.03.1990 | |||
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |

