Изобретение относится к лазерной локации и может быть использовано в высокоточных системах оптической связи с высокоорбитальными искусственными спутниками Земли (ИСЗ), при зондировании лазерным излучением удаленных космических объектов.
Известен способ наведения лазерного излучения на объект, заключающийся в сканировании поля обзора лазерным лучом, регистрации интенсивности светового потока, отраженного от объекта, формировании сигналов управления, пропорциональных составляющим ошибки наведения в двух взаимно перпендикулярных направлениях и коррекции ориентации зеркала наведения.
К недостаткам способа относится необходимость работы в активном режиме, а также низкая точность, что обусловлено необходимостью постоянного перенацеливания оси лазерного излучения.
Наиболее близким к изобретению является способ наведения лазерного излучения на объект, заключающийся в определении последовательности текущих координат объекта в моменты времени ti, i 1,N, определении по ним значений координат для момента времени t*, формировании сигналов целеуказания, пропорциональных значениям угловых координат  (t*),
(t*),  (t*)и дальности
(t*)и дальности  (t*), наведении оси диаграммы направленности излучения на объект с угловыми координатами
(t*), наведении оси диаграммы направленности излучения на объект с угловыми координатами  (t*),
(t*),  (t*).
(t*).
К недостаткам способа-прототипа относится низкая точность наведения, обусловленная ограничениями используемой полиноминальной аппроксимации участков траектории.
Целью изобретения является повышение точности наведения.
Это достигается тем, что по способу наведения лазерного излучения на объект, заключающемуся в определении последовательности текущих координат объекта в моменты времени ti, i 1,N, определении по ним значений координат для момента времени t*, формировании сигналов целеуказания, пропорциональных значениям угловых координат  (t*),
(t*),  (t*)для момента времени t*, наведении оси диаграммы направленности лазерного излучения на объект в момент времени t*, текущие координаты объекта определяют для пяти различных моментов времени ti, i 1,5, определение координат объекта для момента времени t* осуществляют по формулам
(t*)для момента времени t*, наведении оси диаграммы направленности лазерного излучения на объект в момент времени t*, текущие координаты объекта определяют для пяти различных моментов времени ti, i 1,5, определение координат объекта для момента времени t* осуществляют по формулам (t*)=ϕ(ti, t*, εi)
(t*)=ϕ(ti, t*, εi) (t*)=ϕ(ti, t*, βi)
(t*)=ϕ(ti, t*, βi) (t*)= ϕ(ti, t*, Di) где Di дальность до объекта, дополнительно определяют угловую скорость движения объекта
(t*)= ϕ(ti, t*, Di) где Di дальность до объекта, дополнительно определяют угловую скорость движения объекта  (ωε, ωβ) для момента времени t*, определяют величины сигналов рассогласования по величине угловых скоростей движения объекта, определяют ширину диаграммы направленности Ω, сравнивают величины сигналов рассогласования с порогом Ω/k, k > 2, уточняют величины сигналов целеуказания
(ωε, ωβ) для момента времени t*, определяют величины сигналов рассогласования по величине угловых скоростей движения объекта, определяют ширину диаграммы направленности Ω, сравнивают величины сигналов рассогласования с порогом Ω/k, k > 2, уточняют величины сигналов целеуказания  (t*),
(t*),  (t*) с учетом сигналов рассогласования.
(t*) с учетом сигналов рассогласования.
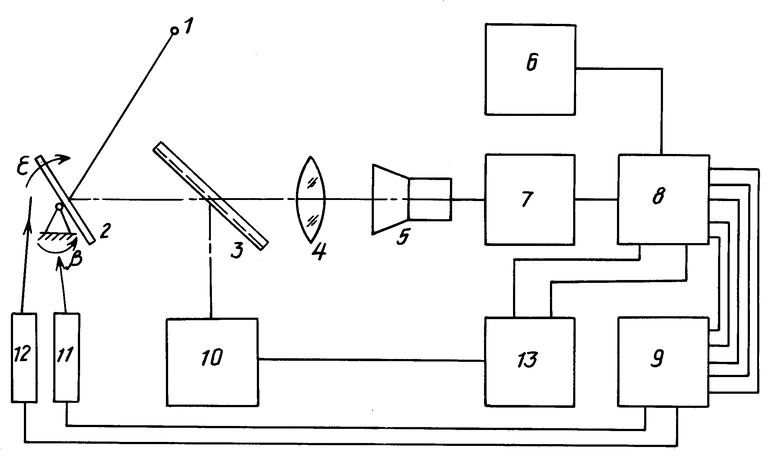
На чертеже приведена структурная схема устройства наведения лазерного излучения на объект.
Оно содержит отслеживаемый объект 1, зеркало системы наведения 2, светоделитель 3, приемный объектив 4, телевизионное фотоприемное устройство 5, радиодальномер 6, блок обработки сигналов 7, блок логической обработки 8, блок формирования сигналов целеуказания 9, лазер 10, азимутальный и угломестный приводы 11, 12, задатчик временных интервалов 13.
Сущность изобретения заключается в следующем.
Уравнение кривой второго порядка, аппроксимирующей участок пространственной траектории объекта, имеет вид
х2(t,x) A1x2 + A2xt + A3t2 +
+A4x + A5t + A6 0 (1) Для ее однозначного определения необходимо определение координат объекта в пяти точках. Определенные значения координат хi, i 1,5, и соответствующие значения времени ti позволяют разрешить относительно неизвестных матричное уравнение вида





 0 (2)
0 (2)
Разрешая данный определитель, можно получить значения коэффициентов Аi (i 1,6) для аппроксимирующего участка траектории объекта уравнения кривой (1).
Осуществляя обработку полученных в результате пятикратного измерения координат объекта значений координатεi, βi, Di} по уравнению задаваемого в неявном виде уравнением (2) функционала Х ϕ (ti, t, xi) для произвольного момента времени t*, получим явное выражение для оценки угловых координат объекта и дальности.


 ≡ ϕ(ti, t*, xi) (3)
≡ ϕ(ti, t*, xi) (3)
где Aj Aj (ti, xi), i 1.5, j 1.6
В силу значительных расстояний до объекта (ИСЗ) необходимо учитывать время распространения излучения по каналу лазер-ИСЗ-лазер. Поэтому определяют значение угловой скорости объекта  (ωε, ωβ), где значения ωε,ωβ определяются по формулам дискретного дифференцирования:
(ωε, ωβ), где значения ωε,ωβ определяются по формулам дискретного дифференцирования:
ωε ωβ
ωβ (4)
(4)
Тогда величины сигналов рассогласования δε,δβ пропорциональные изменению углового положения объекта относительно точки прицеливания  ,
,  , могут быть определены, как
, могут быть определены, как
δε  δβ=
δβ= где tp
где tp оценка времени распространения излучения до объекта.
оценка времени распространения излучения до объекта.
Определяя по геометрии используемого резонатора ширину диаграммы направленности Ω и распределение в пределах нее интенсивности излучения I(ε,β), можно получить зависимость интенсивности излучения на объекте Воот ошибок δε, δβ. Тогда для конкретного используемого источника лазерного излучения может быть однозначно определено значение коэффициента k, связанного с определенным по какому-либо уровню значением ширины диаграммы направленности Ω и обеспечено достижение уровня сигнала на объекте не менее заданного уровня Bmin от максимального Bmax (для Bmin 0,95 Вmax k= 4).
При этом рассогласование линии визирования с текущим положением объекта по соответствующей угловой координате менее Ω/k приводит к снижению интенсивности излучения на объекте меньше, чем на 5% (меньше заданного уровня). Поэтому, осуществляя раздельное сравнение определенных сигналов рассогласования δε,δβ с порогом Ω/k по правилу






 можно уточнить сигналы целеуказания
можно уточнить сигналы целеуказания  (t*),
(t*),  (t*), обеспечивая максимизацию интенсивности излучения на объекте и повышая точность наведения излучения на объект.
(t*), обеспечивая максимизацию интенсивности излучения на объекте и повышая точность наведения излучения на объект.
Описанный принцип наведения реализован в схеме, показанной на чертеже.
С помощью комбинированной системы, включающей радиодальномер 6 и пассивное устройство определения угловых координат, включающее приемный объектив 4, телевизионное фотоприемное устройство 5 и блок обработки сигналов 7, определяются координаты объекта 1.
Блок логической обработки 8 содержит аналого-цифровые преобразователи для ввода величин Di, εi, βi; вычислитель, реализующий операции, описываемые уравнениями (2)-(4), и цифроаналоговые преобразователи для вывода величин  ,
,  ,
,  , ωε,ωβ, поступающих на блок 9 формирования сигналов целеуказания.
, ωε,ωβ, поступающих на блок 9 формирования сигналов целеуказания.
Блок 9 формирования сигналов целеуказания осуществляет определение сигналов рассогласования δε,δβ их сравнение с порогом Ω /k и выработку уточненных сигналов целеуказания  ,
,  , поступающих на угломестный 11 и азимутальный 12 приводы зеркала 2 системы наведения.
, поступающих на угломестный 11 и азимутальный 12 приводы зеркала 2 системы наведения.
После отработки сигналов целеуказания в момент времени t* задатчик временных интервалов 13 выдает сигнал формирования диаграммы направленности (генерации лазерного излучения), по которому происходит возбуждение активной среды лазера и формирование излучения в направлении объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оптико-электронного наведения и дистанционного подрыва управляемого снаряда и комплексированная система для его реализации | 2021 |
|
RU2770951C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемой ракеты и комплексированная система для его реализации | 2022 |
|
RU2791420C1 |
| СПОСОБ МНОГОМЕРНОГО ТРАЕКТОРНОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2306581C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138757C1 |
| СПОСОБ ЮСТИРОВКИ ПРИЕМО-ПЕРЕДАЮЩЕЙ ЛАЗЕРНОЙ ЛОКАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2120645C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К НАЗЕМНОМУ ОБЪЕКТУ | 2012 |
|
RU2521890C2 |
| АППАРАТУРА ПРИЕМА И РЕАЛИЗАЦИИ ЦЕЛЕУКАЗАНИЯ | 2002 |
|
RU2236666C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ВОЗДУШНОЙ ЦЕЛИ ПО ЕЕ УСТАНОВЛЕННОЙ СКОРОСТИ | 2013 |
|
RU2558407C2 |
Использование: в лазерной локации, в высокоточных системах оптической связи с высокоорбитальными искусственными спутниками Земли, при зондировании лазерным излучением удаленных космических объектов. Сущность изобретения: в способе наведения лазерного излучения на объект для повышения точности наведения определяют текущие угловые координаты и дальность объекта для пяти моментов времени, определяют по ним значение координат для момента времени t′ для которого формируют сигналы целеуказания, пропорциональные значениям угловых координат, дополнительно определяют угловую скорость движения объекта для момента времени t′ определяют величины сигналов рассогласования с учетом угловой скорости объекта и сравнивают их с заданным порогом, а величины сигналов целеуказания уточняют с учетом сигналов рассогласования. 1 ил.
СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ, заключающийся в определении последовательности текущих координат объекта в моменты времени ti (i 1, N), определении по ним значений координат для момента времени t*, формировании сигналов целеуказания, пропорциональных значениям угловых координат  для момента времени t*, наведении оси диаграммы направленности лазерного излучения на объект в момент времени t*, отличающийся тем, что, с целью повышения точности наведения, текущие координаты объекта определяют для пяти различных моментов времени ti (i 1, 5), определение координат объекта для момента времени t* по формулам
для момента времени t*, наведении оси диаграммы направленности лазерного излучения на объект в момент времени t*, отличающийся тем, что, с целью повышения точности наведения, текущие координаты объекта определяют для пяти различных моментов времени ti (i 1, 5), определение координат объекта для момента времени t* по формулам
где Di дальность до объекта; дополнительно определяют угловую скорость движения объекта  для момента времени t*, определяют величины сигналов рассогласования по величине угловой скорости движения объекта, определяют ширину диаграммы направленности Ω сравнивают величины сигналов рассогласования с порогом W/k(k>2), уточняют величины сигналов целеуказания
для момента времени t*, определяют величины сигналов рассогласования по величине угловой скорости движения объекта, определяют ширину диаграммы направленности Ω сравнивают величины сигналов рассогласования с порогом W/k(k>2), уточняют величины сигналов целеуказания  с учетом сигналов рассогласования.
с учетом сигналов рассогласования.
| Радиотехнические системы | |||
| /Под ред.Ю.М.Казаринова | |||
| М.: Высшая школа, 1990, с.449-450. |
