Изобретение относится к системам траекторного сопровождения, работающих в оптическом и иных диапазонах электромагнитных волн, и направлено на повышение точности определения ими параметров движения и траектории наблюдаемого объекта путем слежения не только за относительным положением его как точки, но дополнительно и за текущей относительной пространственной ориентацией его конструктивных элементов как тел.
Патентный поиск в ВПТБ по классификации "Системы следящие" - радиолокационные G01S 13/66-13/72; - с использованием иных электромагнитных волн, чем радиоволны G01S 17/66; - для определения скорости или траектории движения G01S 17/58; - комбинация систем с использованием электромагнитных волн, иных, чем радиоволны G01S 17/87; - одновременное измерение дальности и других координат G01S 17/42 (косвенное измерение G 01 S 17/46); - системы лидаров G01S 17/88 не позволил найти явных ни аналогов, ни прототипа. Поэтому в качестве аналога взят способ траекторного сопровождения радиолокационными системами, изложенный в [1], где показано, что для измерения угловых координат (стр.25) "плавно изменяют угловое положение антенны", добиваясь совпадения ее оси с направлением на объект, а отсчет пеленгов при этом производят с датчиков текущей пространственной ориентации антенны; дальность определяют (стр.9) путем измерения "времени запаздывания", то есть "времени распространения радиоволн между РЛС и наблюдаемым объектом в обе стороны", радиальную составляющую скорости движения наблюдаемого объекта "относительно РЛС" (стр.9, 10) определяют путем измерения доплеровского частотного сдвига излученного и отраженного радиолокационных сигналов. На стр.10 объективно отмечается, что "принимаемые радиолокационные сигналы содержат ограниченную информацию о координатах целей и их производных. Обработка сигналов позволяет определить дальность целей, их угловые координаты и радиальную составляющую скорости движения относительно РЛС".
В качестве прототипа взят способ траекторного сопровождения, изложенный в [2] применительно к оптико-электронным следящим системам, обладающим по отношению к радиолокационным повышенной разрешающей способностью, а потому способных представлять для обработки весьма информативное изображение наблюдаемого объекта. "Оптико-электронные следящие системы по своему назначению во многом аналогичны системам автоматического слежения за направлением прихода радиосигнала" [2, стр.19] - измерение угловых координат обеспечивают путем совмещения оптической оси системы с направлением на объект, а отсчет пеленгов при этом производят с датчиков текущей пространственной ориентации оптической оси (головки) следящей системы. Для получения сигналов автоматического управления приводом оптической головки и одновременно уточняющих поправок к значениям пеленгов используют "схемы обработки, где из совокупности видеосигналов изображения извлекается информация об угловых координатах наблюдаемого объекта" относительно оптической оси следящей головки системы. Наиболее перспективными и достаточно развитыми по прототипу являются схемы обработки, отнесенные к "корреляционным дискриминаторам сдвига изображений", их иногда называют элементами "технического зрения". В [2, стр.26] указано, что "Здесь и далее корреляционные дискриминаторы рассматриваются как звенья системы, находящейся в режиме слежения за двумерным сигналом. Примером применения подобной системы может служить комплекс управления автоматической посадкой космического аппарата в заданную точку наблюдаемой поверхности с произвольно расположенными на ней ориентирами. Основная задача - направить космический аппарат в центр участка поверхности, изображение которого выбрано перед началом цикла автоматической посадки и записано в качестве эталона в запоминающее устройство автомата. Эта задача решается без вмешательства человека, если космический аппарат снабжен следящей головкой самонаведения со специальным приемником для регистрации текущих изображений и дискриминатором для оценки сдвигов между ними и эталоном".
На фиг.1 [2, рис.1.1., стр.9] представлены обобщенная функциональная схема существующей оптико-электронной следящей системы (а), где 1 - фотоприемник, 2 - дискриминатор, 3 - регулируемый орган, 4 - преобразователь, 5 - корректирующий фильтр, и типичная характеристика дискриминатора (б), где Δ - составляющая сдвига по углу пеленга, U - выходной сигнал дискриминатора, пропорциональный сдвигу между эталонным и реальным изображениями. Схема имеет характерный для следящих систем замкнутый контур: дискриминатор 2 выходом связан со входом преобразователя 4, который в свою очередь выходом через корректирующие фильтры 5 и регулируемый орган 3 соединен со вторым входом дискриминатора 2. В запоминающее устройство дискриминатора 2 вводят двумерное (плоское) эталонное изображение ΔεЭ, ΔβЭ ожидаемого к сопровождению объекта, на первый вход дискриминатора с выхода фотоприемника 1 подают текущее реальное изображение Δoβ(t), Δoε(t) наблюдаемого объекта, в дискриминаторе оба плоских изображения обрабатывают алгоритмом взаимной корреляции и таким образом находят двумерный сигнал - составляющие относительного сдвига Δβ(t), Δε(t) между этими изображениями, которые несут информацию об ошибках сопровождения наблюдаемого объекта по углам пеленга и должны использоваться для управления приводом оптической головки системы (на схеме не указана), чтобы устранить выявленные сдвиг:


и одновременно уточнить значения углов пеленга β(t), ε(t) (фиг.2), добавив к показаниям датчиков βД(t), εД(1) выявленные дискриминатором сигналы относительного сдвига в угловой мере:


Прототип обладает недостатками, о которых объективно отмечается в [2, стр.27] и которые связаны с потерей точности и устойчивости работы из-за искажений текущих изображений реальных наблюдаемых объектов относительно запомненного двумерного эталонного изображения при "изменении масштаба", "вращении приемника относительно центра контролируемого участка", "изменении ракурсных углов, под которыми наблюдается поверхность".
В оптико-электронных системах траекторного сопровождения дальность определяют либо методом лазерного дальнометрирования, то есть как и в радиолокации, по "времени запаздывания" отраженного сигнала относительно зондирующего сигнала, или методом "внешнебазового" дальнометрирования [3, стр.180, 181], когда знают коэффициент передачи оптики kОПТ, истинные геометрические размеры Lio или площадь силуэта Sio объекта, измеряют видимые значения этих параметров LiB(t), SiB(t) и по формулам подобия определяют дальность:

Таким образом, результатом существующего способа траекторного слежения, иллюстрированного аналогом и прототипом, является то, что с помощью радиолокационных и/или электронно-оптических станций сопровождают текущее относительное положение наблюдаемого объекта как точки с измерением в общем случае всех трех составляющих вектора относительной дальности D(t) (см. фиг.2):

и определением его производных D'(t), ωβ(t), ωε(t), где D(t) - модуль дальности от станции О до наблюдаемого объекта Об(t); β(t), ε(t), ωβ(t), ωε(t) - углы ориентации вектора дальности D(t) и угловые скорости его вращения относительно базисной системы координат OX1Y1Z1, соответственно.
В классической теории механики [4-6] движение объектов рассматривается как движение материальной точки - его центра масс и как тела - движения вокруг центра масс. Известные законы механики позволяют достаточно строго математически описать динамику (7) и кинематику (8) движения объекта "как точки" [5]:

где m(t) - масса объекта;
FX(t), FY(t), FZ(t), VX(t), VY(t), VZ(t), ωX(t), ωY(t), ωZ(t) - проекции векторов всех внешних и реактивных сил F(t), действующих на объект, линейной V(t) и угловой ω(t) скоростей объекта, соответственно, на оси базисной системы координат;
динамику (9) и кинематику (10) движения объекта "как тела":


где IX(t), IY(t), IZ(t) - моменты инерции объекта "как тела" по составляющим главных осей инерции - связанной с объектом системы координат;
MX(t), MY(t), MZ(t), ω'X(t), ω'Y(t), ω'Z(t), ωX(t), ωY(t), ωZ(t) - проекции векторов моментов M(t) всех внешних и реактивных сил, действующих на объект, угловых ускорений ω'(t) и скоростей ω(t) вращения объекта "как тела", соответственно, на оси связанной системы координат;
ψ(t), υ(t), γ(t) - углы рыскания, тангажа и крена, то есть пространственной ориентации объекта "как тела".
Существующий способ сопровождения, как видно из (8), находится на уровне кинематики движения наблюдаемого объекта "как точки", является малоинформативным, не обеспечивает получения высокоточных значений векторов скорости V(t)=dD(t)/dt и, особенно, ускорения V'(t)=dV(t)/dt=d2D/dt2 наблюдаемого объекта, поскольку при этом дважды выполняют операции дифференцирования, при которых резко возрастают помехи, особенно их высокочастотные составляющие.
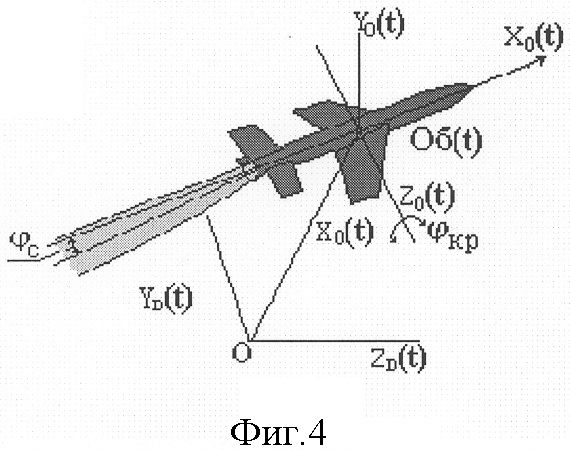
Известно, что направление и величина аэро-, газо- и гидродинамических сил, включая и реактивные, действующие на движущийся объект, а следовательно, направление и величина векторов их ускорения и скорости во многом зависят от текущей пространственной ориентации этих объектов (фиг.3) и их определяющих конструктивных элементов "как тел", например (фиг.4), угла поворота крыла самолета ϕКР, факта работы и углов ориентации сопла ϕC ракетного (реактивного) двигателя летательного аппарата, определяемого по ориентации струи истекающего горячего газа, которая хорошо видна в инфракрасном спектральном диапазоне.
Предлагается к существующим технологическим операциям внешнетраекторного сопровождения объектов "как точки" добавить операции:
- слежения за наблюдаемым объектом "как за телом" с расширением измеряемой информации параметрами относительных углов пространственной ориентации объекта и его определяющих конструктивных элементов "как тел":


где ψo(t), υo(t), γo(t) - относительные углы, соответственно, рыскания, тангажа и крена наблюдаемого объекта;
{ϕКР(t), ϕC(t), ...} - углы поворота определяющих конструктивных элементов наблюдаемого объекта относительно связанной с ним системы координат,
- определения относительных угловых скоростей вращения "тела" путем использования непрерывно корректируемой математической модели движения наблюдаемого объекта:


где ψ'o(t), υ'o(t), γ'o(t) - первые производные от относительных углов пространственной ориентации наблюдаемого объекта "как тела";
ϕ'КР(t), ϕ'C(t), ... - первые производные от относительных углов пространственной ориентации определяющих конструктивных элементов наблюдаемого объекта,
- "внешнебазового" дальнометрирования (5) - путем измерения и вычисления масштаба mB(t)=(Lio/LiB(t))=√(Sio/SiB(t)) видимого текущего изображения наблюдаемого объекта,
- факта и режима работы ракетного (реактивного) двигателя летательного аппарата по наличию, размерам и спектральным характеристикам излучения струи истекающих продуктов горения топлива.
Для реализации дополнительных технологических операций внешнетраекторного сопровождения наблюдаемого объекта "как тела" предлагается ввести в состав оптико-электронной следящей системы дополнительные устройства:
1. Вычислитель корректируемой математической модели движения наблюдаемого объекта и его определяющих конструктивных элементов "как тел", в котором реализуется система уравнений типа (7)-(14).
2. Синтезатор трехмерного управляемого виртуального изображения наблюдаемого объекта и его определяющих конструктивных элементов "как тел", например, компьютер с графическим программным обеспечением "MultiGen Creator для 3D моделирования [7], оптимизированного для приложений реального времени". Модуль Creator "позволяет быстро и качественно создавать фотореалистичные трехмерные детализированные объекты любой сложности, с различным уровнем детализации, с возможностью анимирования элементов модели, а также применять технологии мультитекстурирования".
3. Дискриминаторы определения рассогласований методом отслеживания максимума корреляционой связи между текущим реальным и синтезированными виртуальными изображениями, сканирующими в области этого максимума искомыми параметрами:
а) закрутки наблюдаемого объекта по относительным углам:

где ψЭ(t), υЭ(t), γЭ(t) - искомые углы закрутки синтезированного трехмерного эталонного изображения наблюдаемого объекта;
б) закрутки определяющих конструктивных элементов "как тел" относительно наблюдаемого объекта по углам:

в) явлений:
- факта и режима работы двигателя сопровождаемого объекта по наблюдаемой истекающей из сопла струи продуктов горения топлива;
- изменения масштаба изображения (внешнебазовый дальномер), ....
4. Монитор визуализации процесса многомерного траекторного сопровождения наблюдаемого объекта.
5. Многомерный управляющий орган человека-оператора для целенаправленного корректирующего воздействия на математическую модель движения наблюдаемого объекта и его определяющих конструктивных элементов "как тел".
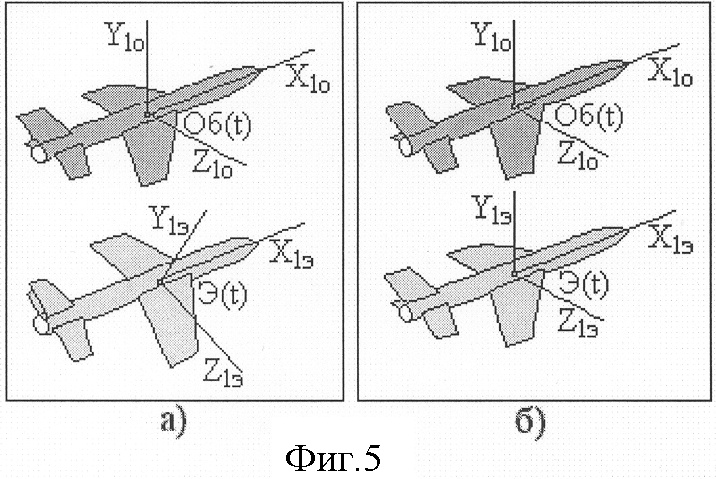
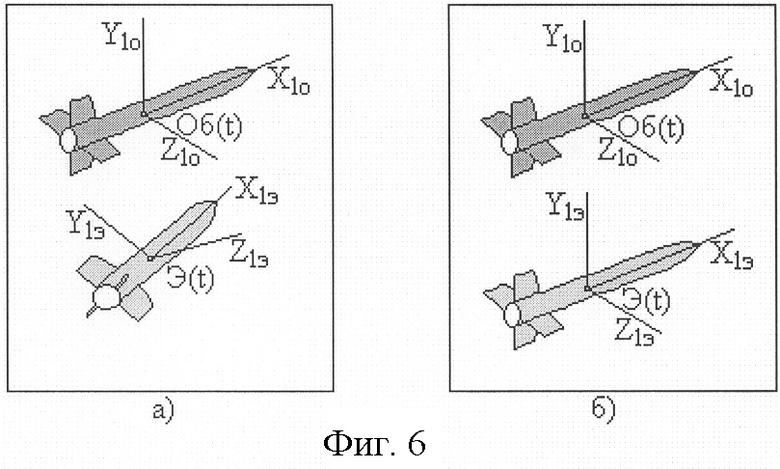
По предлагаемому способу в управляемый синтезатор трехмерного виртуального изображения (компьютер) заносят программу трехмерного графического образа наблюдаемого объекта и его определяющих конструктивных элементов "как тел", проецируют видимую часть этого образа на "картинную" плоскость, перпендикулярную вектору D(t), подают это синтезированное виртуальное изображение на монитор визуализации процесса многомерного траекторного сопровождения целиком рядом с оптико-электронным изображением истинного наблюдаемого объекта и на корреляционные дискриминаторы частями, сканирующими в области отслеживаемых максимумов корреляционной связи искомыми параметрами. С помощью человека-оператора зрительно сравнивают мониторное (фиг.5, 6) синтезированное виртуальное изображение с реальным, выявляют рассогласования в масштабе, сдвиге, пространственной ориентации объекта, его определяющих конструктивных элементов "как тел", рассогласования по другим параметрам многомерного сопровождения, воздействуют на многомерный управляющий орган целенаправленно - в сторону уменьшения выявленных рассогласований, для чего сигналом с выхода многомерного управляющего органа воздействуют на корректируемую математическую модель движения наблюдаемого объекта и его определяющих конструктивных элементов "как тел". Сигналы с выхода скорректированной математической модели подают на управление синтезированным трехмерным виртуальным образом и таким образом приводят его в соответствие с изображением реально наблюдаемого объекта, оценивают результаты корректировки по монитору и продолжают ее до тех пор, пока рассогласования по сдвигам Δβ(t), Δε(t), углам закрутки δψ(t), δυ(t), δγ(t), δϕКР(t), δϕεC(t), δϕβC(t), ..., внешнебазовому дальнометрированию (5), установки факта и режима работы двигателя сопровождаемого объекта, не окажутся внутри (см. фиг.1 "б") зон возможного устойчивого автосопровождения Δmin≤Δ(t)≤Δmax, δmin≤δ(t)≤δmax корреляционных дискриминаторов, накрывающих максимумы корреляционных связей между соответствующими реальными и виртуальными изображениями. После этого каждому дискриминатору дают разрешение на "захват" и автосопровождение. При многомерном автосопровождении на вход вычислителя корректируемой математической модели движения наблюдаемого объекта и его определяющих конструктивных элементов "как тел" подают сигналы рассогласований с выходов корреляционных дискриминаторов, продолжают по монитору анализировать соответствие синтезированного изображения реальному и в случае возникновения больших рассогласований по какому-либо дискриминатору отменяют для него разрешение на "захват" и автосопровождение, осуществляют с помощью многомерного управляющего органа оператора ручную корректировку и вновь дают разрешение на "захват" и автосопровождение объекта по рассматриваемому параметру. Значения параметров многомерного траекторного сопровождения и движения наблюдаемого объекта получают на выходе вычислителя корректируемой математической модели движения наблюдаемого объекта.
На фиг.7 приведена структурная схема устройства, реализующего предлагаемый способ многомерного траекторного сопровождения объекта, где модули прототипа: 1 - фотоприемник, 2 - дискриминатор сдвигов изображений, 3 - регулируемый орган, 4 - преобразователь, 5 - корректирующий фильтр сохранены; указан как присутствующий в общем случае модуль привода оптической головки следящей системы 10; дополнительно введены: 6 - вычислитель корректируемой математической модели движения наблюдаемого объекта и его определяющих конструктивных элементов "как тел", 7 - многомерный управляющий орган человека-оператора, 8 - синтезатор трехмерного управляемого виртуального изображения наблюдаемого объекта и его определяющих конструктивных элементов "как тел", 9 - монитор визуализации процесса многомерного траекторного сопровождения наблюдаемого объекта, 11, ..., 12 - дискриминаторы закрутки наблюдаемого объекта и его определяющих конструктивных элементов "как тел", 13 - дискриминатор масштаба (внешнебазовый дальномер), 14, ..., 15 - дискриминаторы факта и режима работы двигателя сопровождаемого объекта, 16, ..., 20 - дополнительные, преобразователи, 21, ..., 25 - дополнительные корректирующие фильтры.
Предлагаемое устройство многомерного траекторного сопровождения объекта характеризуется следующими связями: выход фотоприемника 1 соединен с первым входом монитора визуализации процесса многомерного траекторного сопровождения наблюдаемого объекта 9 и первыми входами дискриминаторов 2, 11, ..., 15, вторые входы которых связаны со вторым выходом синтезатора трехмерного управляемого виртуального изображения наблюдаемого объекта и его определяющих конструктивных элементов "как тел" 8, связанного первым выходом со вторым входом монитора 9. Выходы дискриминаторов соединены через соответствующие преобразователи 4, 16, ..., 20 и корректирующие фильтры 5, 21, ..., 25 соответственно с первым, вторым, ..., шестым входами вычислителя корректируемой математической модели движения наблюдаемого объекта и его определяющих конструктивных элементов "как тел" 6, который связан седьмым входом с выходом многомерного управляющего органа человека-оператора 7, первым выходом - с входом регулируемого органа 3, вторым выходом - с входом синтезатора трехмерного управляемого виртуального изображения наблюдаемого объекта и его определяющих конструктивных элементов "как тел" 8, третьим выходом - с внешними потребителями информации о параметрах многомерного траекторного сопровождения и движения наблюдаемого объекта, регулируемый орган 3 выходом соединен со входом привода оптической головки следящей системы 10, с помощью которого фотоприемник ориентируют на сопровождаемый объект. Человек-оператор анализирует монитор 9 и с помощью многомерного управляющего органа 7 направляет в систему соответствующие корректирующие воздействия.
Устройство многомерного траекторного сопровождения объекта работает следующим образом. В управляемый синтезатор трехмерного виртуального изображения 8 заносят программу трехмерного графического образа наблюдаемого объекта и его определяющих конструктивных элементов "как тел", там же проецируют видимую часть этого "виртуального" образа на "картинную" плоскость. Видеосигналы изображений сопровождаемого реального объекта с выхода фотоприемника 1 и виртуального - с первого выхода управляемого синтезатора трехмерного эталонного изображения 8, поступают целиком соответственно на первый и второй входы монитора визуализации процесса многомерного траекторного сопровождения 9 для отображения их рядом друг с другом. Видеосигналы изображений сопровождаемого реального объекта с выхода фотоприемника 1 и виртуального - со второго выхода управляемого синтезатора трехмерного виртуального изображения 8 - направляют соответственно на первые и вторые входы дискриминаторов 2, 11÷15 стробированными частями, соответствующими областям функционального назначения каждого из дискриминаторов для их взаимной корреляционной обработки, причем виртуальные изображения размножают по измеряемым параметрам, чтобы ими накрыть области максимумов корреляционных связей и надежно выявить по признаку максимума искомые значения параметров. Человек-оператор зрительно сравнивает мониторное синтезированное (виртуальное) изображение с реальным, выявляет рассогласования в масштабе, сдвиге, пространственной ориентации объекта, его определяющих конструктивных элементов "как тел", рассогласования по другим параметрам многомерного сопровождения, воздействует на многомерный управляющий орган 7 в сторону уменьшения выявленных рассогласований. Сигналом с выхода многомерного управляющего органа 7 воздействуют на седьмой вход вычислителя 6 для коррекции математической модели движения наблюдаемого объекта и его определяющих конструктивных элементов "как тел". Сигналы со второго выхода вычислителя корректируемой математической модели движения наблюдаемого объекта и его определяющих конструктивных элементов "как тел" подают на вход синтезатора трехмерного управляемого виртуального изображения наблюдаемого объекта и его определяющих конструктивных элементов "как тел" 8, чтобы таким образом привести его в соответствие с изображением реально наблюдаемого объекта, оценивают результаты корректировки по монитору 9 и продолжают ее до тех пор, пока рассогласования по сдвигам, углам закрутки, внешнебазовому дальнометрированию, установки факта и режима работы двигателя сопровождаемого объекта не окажутся внутри зон устойчивого автосопровождения корреляционных дисриминаторов 2, 11, ..., 15. После чего каждому из отслеживаемых дискриминаторов дают разрешение на "захват" и автосопровождение. При многомерном автосопровождении на первый, ..., шестой входы вычислителя корректируемой математической модели движения наблюдаемого объекта и его определяющих конструктивных элементов "как тел" 6 поступают с выходов корреляционных дискриминаторов 2, 11, ..., 15 через соответствующие преобразователи 4, 16, ..., 20 и корректирующие фильтры 5, 21, ..., 25 текущие сигналы рассогласований. С первого выхода вычислителя корректируемой математической модели движения наблюдаемого объекта и его определяющих конструктивных элементов "как тел" 6 сигнал рассогласования по сдвигу изображений в угловой мере через регулируемый орган 3 подают на привод оптической головки следящей системы 10, чтобы направить оптическую ось на сопровождаемый объект. Оператор продолжает по монитору 9 анализировать соответствие синтезированного виртуального изображения реальному и в случае возникновения больших рассогласований по какому-либо профильному дискриминатору отменяют для него разрешение на "захват" и автосопровождение, осуществляют ручную корректировку, и вновь с помощью многомерного управляющего органа 7 дают разрешение на "захват" и автосопровождение объекта по рассматриваемому параметру. Значения параметров многомерного траекторного сопровождения и движения наблюдаемого объекта получают на третьем выходе вычислителя корректируемой математической модели движения наблюдаемого объекта.
Перечень чертежей
Фиг.1. Обобщенная функциональная схема существующей оптико-электронной следящей системы (а) и типичная характеристика дискриминатора (б).
Фиг.2. Ориентация вектора относительной дальности D(t) относительно базисной системы координат.
Фиг.3. Текущая пространственная ориентации наблюдаемого объекта (самолета) относительно системы координат O1XDYDZD, связанной с системой сопровождения.
Фиг.4. Углы ориентации крыла и сопла самолета относительно связанной с ним системы координат Об(t)X0(t)Y0(t)Z0(t).
Фиг.5. Индикация на мониторе реального Об(t)X1OY1OZ1O и виртуального Э(t)X1ЭY1ЭZ1Э изображений наблюдаемого самолета: а) с рассогласованием по ориентации; б) в согласованном по ориентации состоянии.
Фиг.6. Индикация на мониторе реального Об(t)X1OY1OZ1O и виртуального Э(t)X1ЭY1ЭZ1Э изображений наблюдаемого осесимметричного объекта - ракеты: а) с рассогласованием по ориентации; б) в согласованном по ориентации состоянии.
Фиг.7. Структурная схема устройства, реализующего предлагаемый способ многомерного траекторного сопровождения наблюдаемого объекта.
Источники информации
1. Григорин-Рябов В.В., ред. Радиолокационные устройства (теория и принципы построения). М., Сов. радио, 1970 г. (стр.8-10 по способу, 14-39, 236-239, 251-263 - по устройству).
2 Астапов Ю.М., Васильев Д.В., Заложнев Ю.И. Теория оптико-электронных следящих систем. М., Наука, 1988 г. (по способу: стр.9-19, 25-31; по устройству: стр.44-63).
3. Кочетков Ю.А., ред. Воздушная стрельба и прицелы. Изд. ВВИА им. проф. Н.Е.Жуковского, 1958 г.,стр.180-184.
4. Айзерман М.А. Классическая механика. М., Наука, 1974 г.
5. Остославский И.В., Стражева И.В. Динамика полета. Траектории летательных аппаратов. М., "Оборонгиз", 1963 г., стр.15-48.
6. Ишлинский А.Ю. Механика относительного движения и силы инерции. АН СССР, Институт проблем механики. М., Наука, 1981 г.
7. Технологии виртуальной реальности. ООО "Группа Джей Си" (JCSI), каталог 2006 г.
Изобретение относится к системам траекторного сопровождения. Достигаемым техническим результатом является повышение точности определения параметров движения и траектории наблюдаемого объекта путем слежения не только за относительным положением его как точки, но и за текущей относительной пространственной ориентацией его конструктивных элементов "как тела". Сущность изобретения заключается в том, что для многомерного траекторного сопровождения объектов используют синтезатор трехмерного управляемого виртуального изображения, вычислитель корректируемой математической модели движения наблюдаемого объекта и его определяющих конструктивных элементов "как тел", монитор визуализации процесса многомерного траекторного сопровождения наблюдаемого объекта, корреляционные дискриминаторы по числу отслеживаемых параметров, соединенные определенным образом, при этом на вход вычислителя корректируемой математической модели подают сигналы рассогласований с выходов корреляционных дискриминаторов, а параметры многомерного траекторного сопровождения и движения наблюдаемого объекта получают на его выходе. 2 н.п. ф-лы, 7 ил.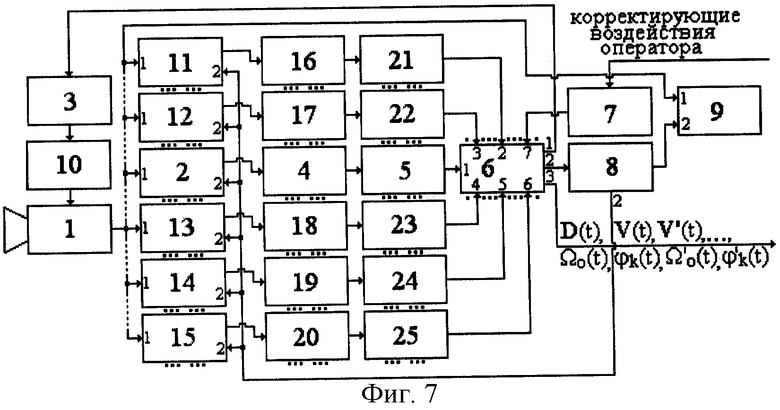
| АСТАПОВ Ю.М | |||
| и др | |||
| Теория оптико-электронных следящих систем | |||
| - М.: Наука, 1988, с.9-19, 25-31, 44-63 | |||
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ИЗОБРАЖЕНИЯ ТОЧЕЧНОГО ИСТОЧНИКА | 1986 |
|
SU1409013A1 |
| RU 2058011 C1, 10.04.1996 | |||
| RU 2193825 C2, 27.11.2002 | |||
| US 2005244438 A1, 01.12.2005 | |||
| WO 0235255 A2, 02.05.2002 | |||
| Шкаф для охлаждения продуктов на горизонтальных сплошных подложках | 1983 |
|
SU1186908A1 |

