Изобретение относится к авиационной технике, а именно к органам приземления летательных аппаратов.
Известна система управления поворотом колес передней опоры шасси, содержащая управляющий элемент, шарнирно соединенный с системой управления, рулевой механизм с гидроцилиндром [1]
Использование известной системы управления поворотом передней опоры шасси требует большой прочности опоры шасси, что снижает эксплуатационные характеристики шасси.
Известна также система управления поворотом колес передней опоры шасси, состоящая из механизма переключения, шарнирно соединенного с системой управления самолета, штурвальчика ручного управления с фиксатором, распределительно-демпфирующего механизма, двух звеньев обратной связи опоры шасси с распределительно-демпфирующим механизмом гидроцилиндров рулевого механизма, проводки управления, содержащей две качалки с кронштейнами, жесткие тяги, пружинную тягу и вертикальный вал с кронштейнами крепления [2]
Известная система управления содержит большое количество функционально необходимых деталей, что снижает надежность в работе, эксплуатационные характеристики и увеличивает массу конструкции.
Задачей изобретения является уменьшение массы конструкции опоры шасси и улучшение ее эксплуатационных характеристик.
Это достигается тем, что система управления поворотом колес передней опоры шасси, содержит управляющую тягу, шарнирно соединенную с системой управления летательным аппаратом, рулевой механизм с гидроцилиндром, соединенным с механизмом обратной связи, гидросистему с дистанционным электроуправлением, причем система управления поворотом колес передней опоры шасси снабжена распределительно-демпфирующим агрегатом управления и системой блокирования колебаний "шимми", состоящей из датчика вибраций, размещенного на стойке опоры шасси, блока измерения вибраций и реле блокировки, установленных на каркасе летательного аппарата, при этом распределительно-демпфирующий агрегат управления жестко закреплен на каркасе летательного аппарата и шарнирно соединен управляющим рычагом с другим концом управляющей тяги, а рычагом обратной связи распределительно-демпфирующий агрегат управления шарнирно соединен с механизмом обратной связи, выполненным в виде тяги, шарнирно соединенной через качалку с гидроцилиндром рулевого механизма, а система блокирования колебаний "шимми" электрически соединена с дистанционным электроуправлением гидросистемы, управляющая тяга снабжена наконечником, имеющим возможность вращения относительно продольной оси, а дистанционное электроуправление снабжено двухпозиционной четырехклеммной кнопкой включения.
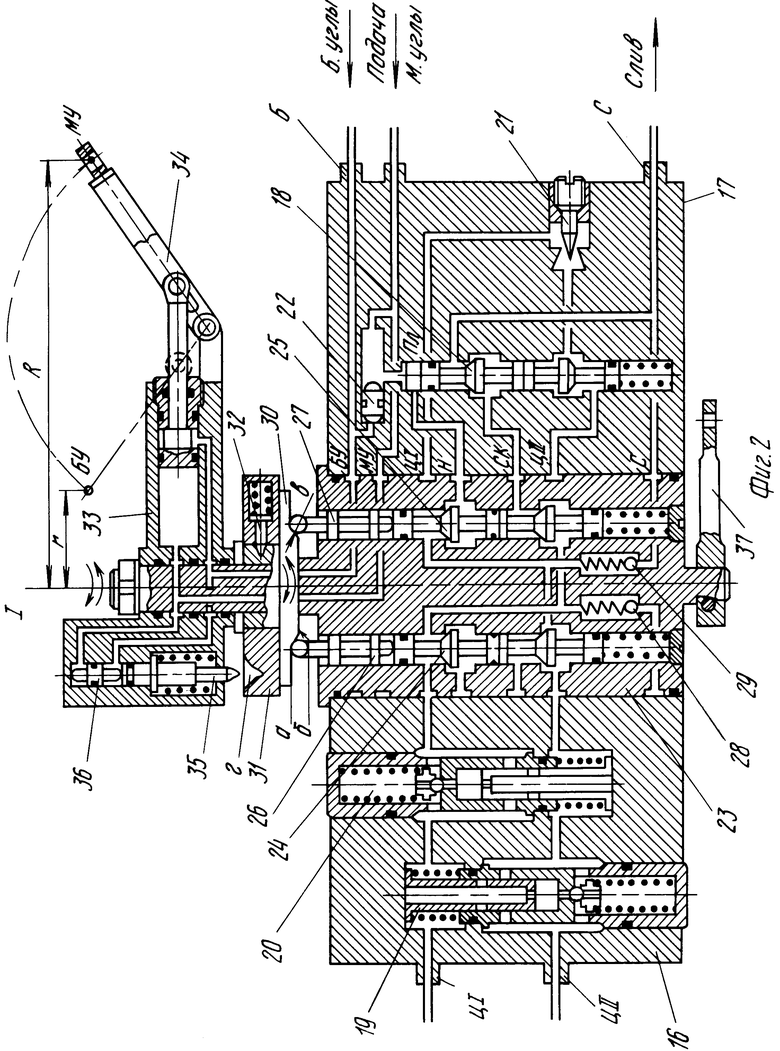
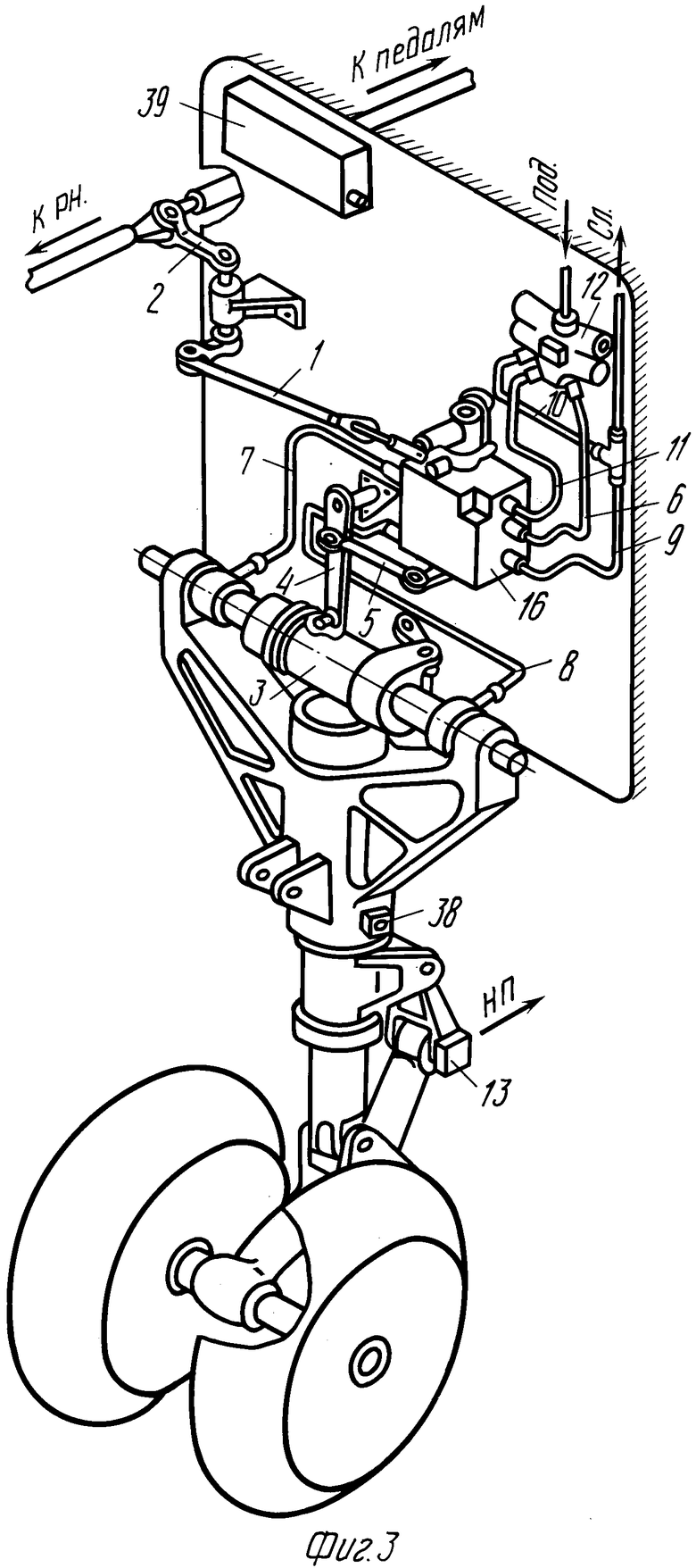
На фиг. 1 изображена схема системы управления поворотом колес передней опоры шасси; на фиг. 2 узел I на фиг. 1; на фиг. 3 система управления поворотом колес передней опоры шасси.
Система управления поворотом колес передней опоры шасси представляет собой гидромеханическую систему с дистанционным электроуправлением режимами и механической жесткой обратной связью и содержит управляющую тягу 1, шарнирно соединенную одним концом через двуплечую качалку 2 с системой управления летательным аппаратом, исполнительный гидроцилиндр 3 рулевого механизма, соединенный через качалку 4 с одним концом тяги 5 обратной связи, гидросистему с трубопроводами 6-11 и распределительным электрокраном 12, а также механизмом концевых выключателей 13, кнопкой 14 переключения режимов и переключателем 15 дистанционного электроуправления. В корпусе электрокрана 12 размещены два электромагнитных клапана "П" (правый) и "Л" (левый), золотник-распределитель "Р", штуцер "Подача", штуцер слива "сл" и два распределительных штуцера Ш1 и Ш2.
Система снабжена распределительно-демпфирующим агрегатом 16 управления (РДАУ). Этот агрегат составляет принципиальную основу системы и предназначен для выполнения всех ее функциональных действий, необходимых для управления поворотом колес на современных самолетах.
Агрегат содержит корпус 17, неподвижно закрепленный на каркасе летательного аппарата в нише шасси с размещенными в нем клапаном 18 включения с плунжером "Пл", предохранительными клапанами 19 и 20, дросселем 21 и челночным клапаном 22 (фиг. 2). В корпусе 17 установлен блок управления, являющийся одновременно следящим устройством и имеющий в своем составе ступенчатый вал 23, клапанный распределитель с клапанами 24 и 25 и толкателями 26 и 27, подпитывающие обратные клапаны 28 и 29, кулачковую шайбу 30 с площадками "а" (нулевая подача), "б" (максимальная подача) и двумя кулачковыми скосами "в", приводное кольцо 31 с профилированным пазом "г" и механизмом 32 аварийного отключения системы управления, головку управления, представляющую собой поворотный гидроцилиндр 33 с размещенным на нем управляющим рычагом 34 и механизмом сцепления с подпружиненным штоком 35 и разделительным поршнем 36, а также рычаг 37 обратной связи.
На корпусе 17 выполнены два штуцера подачи "M" (малые углы) и "Б" (большие углы) штуцер слива "с", два штуцера распределения ЦI и ЦII. Внутри корпуса 17 и в ступенчатом валу 23 выполнены каналы для подвода рабочей жидкости.
Проточки в корпусе и ступенчатом валу обозначены следующим образом: МУ малые углы, БУ большие углы, ЦI подача к штуцеру ЦI, ЦII подача к штуцеру ЦII, Н нагнетание, СК слив в магистраль через клапан включения, С слив в магистраль напрямую.
Система управления поворотом колес снабжена системой блокирования колебаний "шимми", которая содержит датчик 38 вибрации, установленный на неподвижной части стойки шасси, блок 39 измерения вибраций, установленный на каркасе в нише шасси и реле 40 блокировки, размещенное в коммутационной коробке шасси. Для приема информации в том числе и о вибрациях на борту летательного аппарата используются системы 41 и 42 регистрации параметров и информации соответственно. Эти системы являются бортовыми системами летательного аппарата. РДАУ 16 соединен с тягой 5 рычагом 37 обратной связи.
Система управления поворотом колес передней опоры шасси работает в 3-х режимах: режим управления на малых углах (взлет-посадка), режим управления на больших углах (руление), режим демпфирования (самоориентирование колес).
На режиме управления на малых углах устройство работает следующим образом. При включенном переключателе 15 система на режим малых углов включается автоматически механизмом концевых выключателей 13 по обжатию амортизатора передней опоры шасси в момент касания взлетно-посадочной полосы (ВПП).
Таким образом, если самолет находится на земле (амортизатор обжат) и переключатель 15 включен, то система готова к работе в режиме управления на малых углах. При этом срабатывает электромагнитный клапан "П" распределительного электрокрана 12, его шарик перекрывает входной канал и золотник "Р", перемещаясь вправо, подает рабочую жидкость по трубопроводу 6 к штуцеру "М" РДАУ 16. Далее по каналу в корпусе 17 давление передается в челночный клапан 22, прижимая его к левой стенке полости клапана и открывая центральное отверстие. Плунжер "ПЛ" клапана 18 включения смещается вниз, и давление передается через открывшийся канал к проточке "Н" в ступенчатом валу 23 и устанавливается в полостях клапанов 24 и 25 клапанного распределителя. Одновременно давление рабочей жидкости поступает к проточке "МУ" ступенчатого вала и по каналу ступенчатого вала 23 в полости корпуса головки управления к поршню штока гидроцилиндра и к разделительному поршню 36 механизма сцепления. При этом поршень штока гидроцилиндра 33 головки управления, переместившись в крайнее правое положение, штоком фиксирует управляющий рычаг 34 в положение "МУ" (малые углы), а разделительный поршень, перемещаясь вниз, воздействует на подпружиненный шток 35 и вводит его наконечник в профилированный паз "г" приводного кольца 31. Таким образом, обеспечивается сцепление головки управления с приводным кольцом, которое, в свою очередь, сцеплено с кулачковой шайбой 30. Следовательно, система управления поворотом колес в момент посадки подключилась к системе управления рулем направления самолета и работает от педалей. При этом, когда педали находятся в нейтральном положении, шарики толкателей 26 и 27 находятся в контакте с площадкой "а" (нулевая подача) кулачковой шайбы 30 у оснований кулачковых скосов "в". Клапаны 24 и 25 под действием своих пружин закрыты. При перемещении педалей на полный ход обеспечивается поворот двуплечей качалки 2. При этом через управляющую тягу 1, соединенную другим концом с управляющим рычагом 34, происходит поворот головки управления. Управляющий рычаг 34, находясь в положении "МУ", обеспечивает поворот точки соединения управляющей тяги с наконечником рычага по большому радиусу R на малые углы.
Например, когда головка поворачивается по часовой стрелке (при виде сверху), по часовой стрелке поворачивается и кулачковая шайба 30. Действием кулачкового скоса "в" шайбы 30 толкатель 26 перемещается вниз и открывает клапан 24, шарик толкателя вкатывается на площадку "б" (максимальная подача). Так как перепад между площадками "а" и "б" кулачковой шайбы по высоте невелик (примерно 1 мм), клапан открывается практически сразу.
При этом давление рабочей жидкости передается из проточки "Н" и полости клапана в проточку "ЦI" ступенчатого вала 23 и далее через проточки в корпусе 17, через предохранительные клапаны 20 и 19, штуцер ЦI и по трубопроводу 7 в левую полость исполнительного гидроцилиндра 3 нулевого механизма. Корпус гидроцилиндра, перемещаясь по неподвижному штоку влево, поворачивает влево колеса передней опоры шасси. Перемещаясь влево, корпус гидроцилиндра 3, будучи соединенным наружной кольцевой проточкой с качалкой 4 обратной связи, посредством тяги 5, поворачивает также по часовой стрелке рычаг 37 обратной связи и, следовательно, ступенчатый вал 23. В это же время из правой полости исполнительного гидроцилиндра 3 происходит слив рабочей жидкости по трубопроводу 8, через штуцер ЦII корпуса 17 РДАУ, проточки в корпусе, через предохранительные клапаны 19 и 20 и проточку "ЦII" в ступенчатом вале 23 блока управления, через открытый нижний конусный затвор клапана 24 в проточку "СК" ступенчатого вала 23 и далее через канал в корпусе 17 к клапану 18 включения, верхний конусный затвор которого открыт (а нижний закрыт) и далее в сливную магистраль через канал в корпусе и штуцер "С" по трубопроводу 9.
Поворот колес передней опоры шасси происходит до тех пор, пока под действием обратной связи ступенчатый вал 23 не повернется в такое положение, когда шарик толкателя 26 скатится с площадки "Б" кулачковой шайбы 30 на площадку нулевой подачи "а". Клапан 24 при этом закрывается. Прекращается подача рабочей жидкости в левую полость исполнительного гидроцилиндра 3 рулевого механизма, прекращается и поворот колес передней опоры шасси.
При повороте головки управления в противоположном направлении, т.е. против часовой стрелки, в ту же сторону происходит и поворот кулачковой шайбы 30. При этом под действием кулачкового скоса "в" шарик толкателя 27 вкатывается на площадку "б" (максимальная подача) кулачковой шайбы 30 и перемещает толкатель 27 вниз, открывая клапан 25 распределителя.
Верхний конусный затвор клапана 25, открывшись, сообщает проточку "Н" через сквозные отверстия в ступенчатом валу 23 с проточкой "ЦII" (клапан 24 в это время закрыт). Нижний конусный затвор клапана 25, открывшись, сообщает проточку "ЦI" через каналы в ступенчатом валу 23 с проточкой "СК".
Таким образом, давление рабочей жидкости передается из проточки "Н" в проточку "ЦII" и далее через каналы и проточки в корпусе 17, через предохранительные клапаны 20 и 19, через штуцер "ЦII", по трубопроводу 8 в правую полость исполнительного гидроцилиндра 3. Происходит поворот колес передней опоры шасси в другую сторону (вправо). Перемещаясь по неподвижному штоку, корпус гидроцилиндра через качалку 4 и тягу 5 обратной связи поворачивает рычаг 37 обратной связи и через него ступенчатый вал 23 блока управления в ту же сторону против часовой стрелки.
В это же время из левой полости исполнительного гидроцилиндра 3 идет слив рабочей жидкости через трубопровод 7, штуцер ЦI РДАУ, сквозные отверстия и проточки в корпусе 17, через предохранительные клапаны 19 и 20 к проточке "ЦI" ступенчатого вала 23, через сквозные отверстия в ступенчатом валу и открытый нижний конусный затвор клапана 25 в проточку "СК" ступенчатого вала и далее через каналы в корпусе 17 к клапану 18 включения, верхний конусный затвор которого открыт (и нижний закрыт), и далее через канал в корпусе 17, штуцер "С" и трубопровод 9 в сливную магистраль гидросистемы. Поворот колес передней опоры шасси происходит до тех пор, пока под воздействием обратной связи через рычаг 37 обратной связи ступенчатый вал 23 блока управления РДАУ не повернется в такое положение (в том же направлении, что и головка управления), когда шарик толкателя 27 скатится с площадки "б" на площадку нулевой подачи "а" кулачковой шайбы 30.
Клапан 25 при этом закрывается, подача рабочей жидкости в правую полость исполнительного гидроцилиндра 3 прекращается. Прекращается и поворот колес передней опоры шасси.
Таким образом происходит работа системы управления поворотом колес передней опоры шасси при посадке и движении по земле в режиме управления на "малых углах", обеспечивая поворот колес на угол ±10о.
В процессе взлета, при отрыве колес передней опоры шасси от взлетно-посадочной полосы (ВПП), разжимается амортизатор шасси, происходит автоматическое обесточивание распределительного электрокрана 12 посредством механизма концевых выключателей 13.
Оба электромагнитных клапана распределительного электрокрана 12 открыты, золотник "Р" устанавливается в нейтральное положение, подача рабочей жидкости в РДАУ 16 прекращается. Штуцера "М" и "Б" РДАУ при этом сообщаются через трубопроводы, штуцера "ШI" и "Ш2", проточку в золотнике "Р" и штуцер слива "Сл" электрокрана 12 и далее трубопровод 10 со сливной магистрально гидросистемы.
При этом подпружиненный шток 35 механизма сцепления головки управления РДАУ под действием своей пружины перемещается вверх вместе с разделительным поршнем 36 и выходит из профилированного паза "г" приводного кольца 31, отсоединяя от него головку управления. Головка управления получает возможность свободного поворота на верхней ступени ступенчатого вала 23. Система управления поворотом колес передней опоры шасси отсоединяется от системы управления рулем направления самолета при взлете. Челнок челночного клапана 22 и управляющий рычаг 34 головки управления РДАУ остались в положениях, соответствующих режиму управления на "малых углах".
Управление на больших углах ("Руление).
В момент посадки самолета, при касании колесами ВПП, обжимается амортизатор передней опоры шасси, происходит автоматическое включение системы управления на режим "малых углов" (взлет-посадка) при помощи механизма концевых выключателей 13. Перевод системы управления поворотом колес после пробега самолета в режим работы "большие углы" ("Руление") осуществляется нажатием кнопки 14. При этом происходят разъединение электроцепи, питающей правый электромагнитный клапан "П" распределительного электрокрана 12, и включение цепи питания левого электромагнитного клапана "Л". Золотник "Р" электрокрана 12 перемещается в крайнее левое положение и сообщает штуцер "Подача" со штуцером "Ш2" и далее с помощью трубопровода 11 со штуцером "Б" (большие углы) РДАУ16. Штуцер "М" РДАУ при этом сообщается через трубопровод 6, штуцер "Ш1" и канал в золотнике "Р" электрокрана 12 со сливной магистралью гидросистемы по трубопроводу 10.
Давление рабочей жидкости из штуцера "Б" РДАУ передается далее через каналы в корпусе 17 в челночный клапан 22, перемещая челнок вправо, далее через центральное отверстие в полости челночного клапана давление действует на плунжер "Пл" клапана 18 включения, смещая его вниз и открывая канал, ведущий к проточке "Н" в ступенчатом валу 23. Давление рабочей жидкости через проточку "Н" передается в полости клапанов 24 и 25 клапанного распределителя. При этом открытый верхний конусный затвор клапана 18 включения сообщает проточку "СК" ступенчатого вала 23 со сливной магистралью гидросистемы через каналы в корпусе 17 и штуцер "С". Нижний конусный затвор клапана 18 включения в это время закрыт и перекрывает канал, обобщающий проточку "ЦII" с дросселем 21.
Одновременно давление рабочей жидкости передается к проточке "БУ" ступенчатого вала 23 и по каналу ступенчатого вала поступает в полости корпуса головки управления 3 к поршню гидроцилиндра (со стороны штока) и подпружиненному штоку 35 механизма сцепления.
При этом поршень со штоком гидроцилиндра, перемещаясь влево, переводит управляющий рычаг 34 ( с подсоединенной к нему управляющей тягой 1) в положение "Бу", а подпружиненный шток 35 механизма сцепления фиксируется в профилированном пазу "г" приводного кольца 31 давлением рабочей жидкости.
Благодаря быстродействию срабатывания электромагнитных клапанов распределительного электрокрана 12 (не более 0,2 с) при переключении режимов управления с малых углов на большие и наоборот нажатием и разжатием двухпозиционной кнопки 14 расцепки штока 35 с профилированным пазом "г" приводного кольца 31 практически не происходит в момент этого переключения.
Таким образом, головка управления готова к работе на режиме "больших углов", так как управляющий рычаг 34, находясь в положении "БУ" обеспечивает поворот точки соединения его наконечника с управляющей тягой 1 по малому радиусу r на большие углы (при той же величине поворота двуплечей качалки 2 и поступательного хода управляющей тяги 1, соответствующих полному ходу педалей).
Дальнейшая работа всех элементов системы управления поворотом колес передней опоры шасси происходит аналогично работе устройства на режиме "малые углы" управления и изложена выше. При этом поворот колес передней опоры шасси происходит на угол ±50о.
В режиме демпфирования система управления поворотом колес работает при отсутствии давления в линии подачи гидросистемы, т.е. при обесточенных электромагнитах распределительного электрокрана 12. Обесточивание электромагнитов производится вручную переключателем 15 или автоматически системой блокирования колебаний "шимми".
Вибрации (колебания) стойки передней опоры шасси, возникающие под действием внешних сил при взлете, посадке, рулении воспринимаются датчиком 38 вибрации, установленным на неподвижной части стойки. Далее сигналы вибраций от датчика поступают в электронный блок 39 измерения вибраций системы блокирования колебаний "шимми". Здесь они измеряются и контролируются по частоте и скорости. Наибольшая вероятность возникновения колебаний "шимми" на взлете или посадке, когда система работает на режиме управления на "малых углах" и скорости движения велики.
При работе системы на режиме "малых углов" работает цепь электропитания электромагнита "П" распределительного электрокрана 12 и обеспечивает подачу давления рабочей жидкости в штуцер "М" РДАУ 16 (фиг. 1). Когда колебания стойки опоры шасси достигают определенного уровня по частоте и скорости нарастания (соответствующего колебаниям "шимми") блок 39 измерения вибраций выдает сигнал на реле 40 блокировки, по которому последнее разрывает электрическую цепь питания правого электромагнита "П" электрокрана 12. Золотник "Р" электрокрана устанавливается в нейтральное положение. Его штуцера Ш1 и Ш2 соединяются через штуцер "Сл" со сливной магистралью гидросистемы. Подача давления рабочей жидкости в РДАУ 16 прекращается и его штуцера "М" и "Б" соединяются со сливной магистралью гидросистемы через трубопроводы 6 и 11. При этом клапан 18 включения (фиг. 2) закрыт, канал подвода жидкости к проточке "Н" ступенчатого вала 23 перекрыт плунжером "Пл" клапана. Верхний конусный затвор клапана включения закрыт. Нижний конусный затвор клапана открыт и проточка "ЦII" ступенчатого вала 23 сообщается с проточкой "ЦI" через дроссель 21. Правая и левая полости исполнительного гидроцилиндра 3 рулевого механизма закольцованы между собой. Подпружиненный шток 35 механизма сцепления головки управления находится в крайнем верхнем положении и не соединен с профилированным пазом "г" приводного кольца 31. Таким образом, система управления поворотом колес передней опоры шасси автоматически отсоединена от системы управления рулем направления самолета и переведена в режим "демпфирования". Колеса передней опоры шасси свободно ориентируются при движении по ВПП. При этом рабочая жидкость перетекает из одной полости гидроцилиндра 3 в другую через дроссель 21. Создаваемый дросселем перепад давления жидкости совместно с работой предохранительных и подпитывающих клапанов РДАУ предотвращает развитие колебаний "шимми" и обеспечивает их демпфирование и затухание.
При снижении уровня вибрации на стойке передней опоры (ниже уровня колебаний "шимми") сигнал от датчика 38 вибраций поступает в блок 39 измерения и последний выдает соответствующий сигнал на реле 40 блокировки. Реле замыкает цепь электропитания правого электромагнитного клапана "П" электрокрана 12. Система управления поворотом колес автоматически переводится из режима "демпфирование" (самоориентирования колес) в режим управления на "малых углах" и соединяется с системой управления рулем направления самолета.

Изобретение относится к авиационной технике, а именно к органам приземления летательных аппаратов. Система управления поворотом колес передней опоры шасси содержит управляющую тягу, шарнирно соединенную одним концом через двуплечую качалку с системой управления летательным аппаратом, исполнительный гидроцилиндр рулевого механизма, соединенный через качалку с одним концом тяги обратной связи, гидросистему с трубопроводами и распределительным электрокраном, механизм концевых выключателей, распределительно-демпфирующий агрегат. 3 ил.
СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ, содержащая управляющую тягу, шарнирно соединенную с системой управления летательным аппаратом, рулевой механизм с гидроцилиндром, соединенным с механизмом обратной связи, гидросистему с дистанционным электроуправлением, отличающаяся тем, что система управления поворотом колес передней опоры шасси снабжена распределительно-демпфирующим агрегатом управления и системой блокирования колебаний "шимми", состоящей из датчика вибрации, размещенного на стойке опоры шасси, блока измерения вибраций и реле блокировки, установленных на каркасе летательного аппарата, при этом распределительно-демпфирующий агрегат управления жестко закреплен на каркасе летательного аппарата и шарнирно соединен управляющим рычагом с другим концом управляющей тяги, а рычагом обратной связи распределительно-демпфирующий агрегат управления шарнирно соединен с механизмом обратной связи, выполненным в виде тяги, шарнирно соединенной через качалку с гидроцилиндром рулевого механизма, система блокирования колебаний "шимми" электрически соединена с дистанционным электроуправлением гидросистемы, управляющая тяга снабжена наконечником, имеющим возможность вращения относительно продольной оси, а дистанционное электроуправление снабжено двухпозиционной четырехклеммной кнопкой включения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
