Изобретение относится к авиации, преимущественно беспилотной авиационной технике, т.е. к беспилотным аппаратам с большим удлинением крыльев, например к высотным, а также для схем "летающее крыло".
Известны устройства, способствующие взлету летательных аппаратов, например, [1] Оно представляет собой несложное инженерное сооружение на базе грузового автомобиля. Имеет вращающуюся сбалансированную штангу, в конкретном случае длиной 6 м. Раскручивание и взлет осуществляются с помощью собственной силовой установки летательного аппарата и не нуждается в дополнительной энергетической установке.
Однако такое устройство не способствует вертикальному взлету беспилотных аппаратов, что так необходимо в условиях их применения на пересеченной местности. К тому же оно громоздко, монтируется на специальной машине. Указанным способом можно осуществлять запуски только лишь малоразмерных беспилотных аппаратов, так как более тяжелые (весом более 2 т) потребуют создания чрезвычайно громоздких и массивных сбалансированных вращающихся штанг, которые уже не поместятся на автомобилях.
Наиболее близким к изобретению является техническое решение [2] принятое за прототип. Это устройство представляет собой авиационную систему, содержащую самолеты, ориентированные для движения по кругу в одном направлении, и средство для их соединения и расстыковки с дистанционным управлением.
Недостатками этой системы являются громоздкость и сложность в изготовлении средства для соединения самолетов, требующего значительных финансовых затрат на его постройку. Это стационарное крупное сооружение с гидроприводным устройством подъема самолетов, приспособленным для удерживания их и последующей расстыковки, нуждается в установке на фундаменте. Кроме того, вертикальное перемещение самолетов ограничено размерами самого средства для соединения, а также его жесткой связью с землей.
Целью изобретения является упрощение конструкции при обеспечении вертикального взлета.
Для этого средство для соединения и расстановки самолетов выполнено в виде крепежного приспособления, соединенного с возможностью расфиксации относительно посадочных мест на концах консолей крыльев самолетов, оснащено средствами для его спуска на землю после расфиксации, а дистанционное управление содержит привод с автономным источником питания для упомянутого крепежного приспособления. Крепежное приспособление выполнено в виде шариковых замков и содержит средство для спуска на землю после растыковки. Привод для крепежного приспособления выполнен в виде реечно-зубчатого редуктора с электродвигателем, а в качестве автономного источника питания использован электрический аккумулятор.
Дистанционное управление содержит размещенные на консолях крыльев самолетов выключатели электродвигателя и цепь связи с оператором.
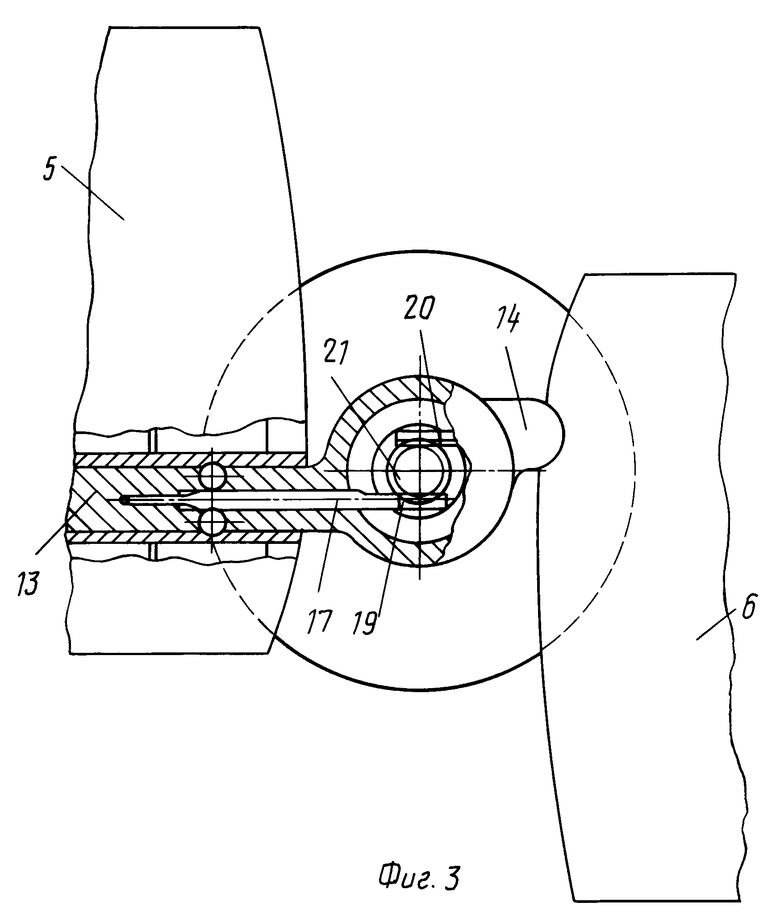
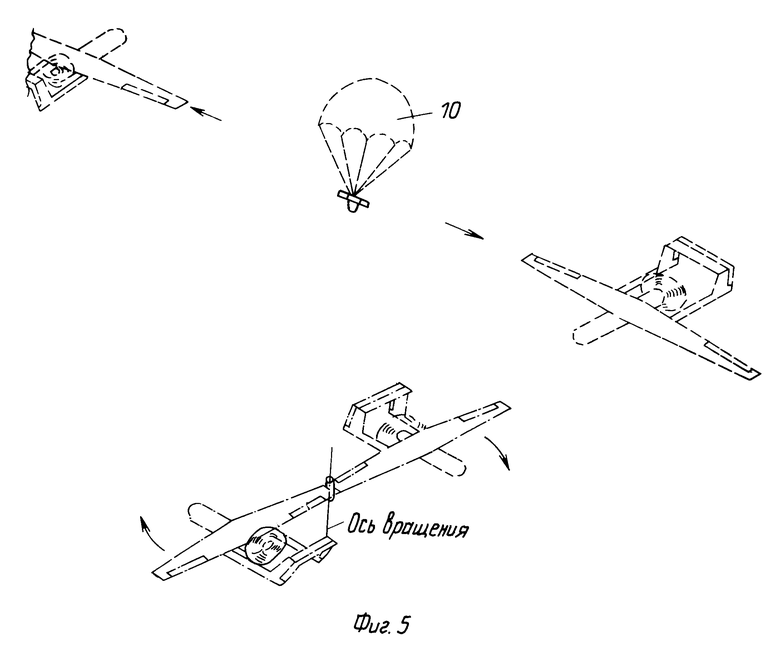
На фиг.1 дан общий вид системы; на фиг.2 средство для соединения и расстыковки при состыкованном положении самолетов системы, вид сбоку; на фиг.3 то же, вид сверху; на фиг.4 левая часть средства для соединения и расстыковки в момент расцепки консолей крыльев; на фиг.5 авиационная система после расстыковки самолетов.
Система состоит по крайней мере из двух самолетов 1 и 2, а именно беспилотных самолетов, содержащих двигатели 3 и 4. Концы консолей крыльев 5 и 6 соединены посредством специального средства 7 для соединения и расстыковки, выполненного в виде крепежного приспособления. Самолеты в системе ориентированы для движения по кругу в одном направлении, т.е. вектора тяг их двигателей направлены в противоположные стороны так, чтобы при работе их создавался момент вращения одного направления. Состыкованные таким образом самолеты должны быть одного веса. Кроме того, самолеты имеют высоты 8 и 9. Средство для соединения и расстыковки оснащено средствами для спуска, выполненными в виде парашюта 10 или авторотирующего винта.
Корпус 11 средства для соединения и расстыковки самолетов 1 и 2 имеет резиновый амортизатор 12. Само средство выполнено в виде крепежного приспособления, которое образовано штырями 13 и 14, на каждом из которых размещен один из шариковых замков 15 и 16, взаимодействующих с осями 17 и 18 и фиксирующих положение крепежного приспособления относительно посадочных мест на консолях крыльев 5 и 6. Оси 17 и 18 имеют на концах зубчатые рейки 19 и 20, зацепленные с шестерней 21, жестко посаженной на вал электродвигателя 22 с понижающим редуктором 23. Это образует привод для фиксации консолей крыльев. В качестве автономного источника используется электрический аккумулятор 24. Элементом дистанционного управления служит выключатель 25 электродвигателя 22, связанный электрической цепью с оператором.
Крышка 26 предохраняет средство для спуска, например, парашют 10. Упоры 27 и 28 на штырях 13 и 14 служат для ограничения их введения внутрь консолей, где они взаимодействуют посредством шариковых замков 15 и 16 с консолями крыльев 5 и 6, на посадочных местах которых выполнены кольцевые канавки 29 для приема шариков замков 15 и 16.
В работе система действует следующим образом.
После запуска силовых установок беспилотные летательные аппараты, в данном случае с самоориентирующимися шасси, раскручиваются вокруг оси вращения до взлетной скорости. Рули высоты 8 и 9 при этом установлены на пикирование, прижимая носовые стойки обоих летательных аппаратов к взлетной площадке и предупреждая их преждевременный отрыв от земли. После достижения взлетной скорости рули высоты по команде оператора плавно переводятся во взлетное положение и группа аппаратов взлетает вертикально вверх, продолжая вращаться вокруг их общей оси вращения.
После набора группой беспилотных летательных аппаратов безопасной высоты, т. е. высоты, на которой невозможно их столкновение с окружающими предметами, по команде с земли происходит расцепка. Летательные аппараты под воздействием центробежных сил разлетаются при этом в разные стороны, а средство для соединения и расстыковки плавно опускается на парашюте 10.
Работает средство для соединения и расстыковки следующим образом.
При ходе осей 17 и 18 (фиг.2) по направлению к шестерне 21 шарики замков 15 и 16 входят внутрь штырей 13 и 14, которые в таком положении заводят в концы консолей до упоров 27 и 28. После обратного (от шестерни по направлению к консолям) хода осей 17 и 18 шарики замка попадают в кольцевую канавку 29 (фиг. 4) концов консолей, обеспечивая таким образом фиксацию. По команде оператора выключатель 25 замыкает цепь питания электродвигателя, который, вращая шестерню 21, втягивает оси на себя, освобождает шарики замков 15 и 16 из зацепления (фиг.4) и летательные аппараты под действием центробежных сил разлетаются в разные стороны.
Легкая крышка 26, освободившись от концов консолей, под действием аэродинамических сил улетает, вытягивает за собой шарнирно подвешенный парашют 10, на котором устройство плавно совершает посадку. Вместо парашюта могут использоваться авторотирующие аэродинамические поверхности. В корпусе средства для соединения и расстыковки может находиться топливный бак, предназначенный только для питания силовых установок на этапе взлета.
Необходимо учесть, что для обеспечения вертикального взлета и совершения продолжительного полета для решения военных и гражданских целей в настоящее время за рубежом используются винтокрылые беспилотные летательные аппараты, которые, во-первых, неэкономичны в крейсерском полете ввиду особенностей их аэродинамической компоновки, а, во-вторых, подобных аппаратов в нашей стране пока не имеется. Поэтому очень важно, что авиационная система позволяет осуществить вертикальный взлет без сложных существенных переделок уже эксплуатируемых летательных аппаратов самолетного типа и ликвидировать отставание в этой области.
Технико-экономический эффект будет иметь место и вследствие повышения безопасности на этапе взлета предлагаемым образом. При запуске беспилотного летательного аппарата с катапульты бывают случаи внезапной остановки двигателя при сходе с направляющих, что зачастую заканчивается серьезными поломками самолета. При использовании предлагаемой авиационной системы в случае отказа двигателя у одного из беспилотного летательного аппарата группа плавно приземлится, продолжая вращаться вокруг общей оси. Даже при отказе всех двигателей группа, вращаясь за счет инерции, совершит безаварийную посадку.
Необходимо также отметить, что предлагаемая авиационная система позволяет производить "залпом" запуски большого числа летательных аппаратов самолетного типа одновременно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Летательный аппарат с дополнительным сбрасываемым крылом | 2018 |
|
RU2682157C1 |
| Устройство защиты от беспилотных летательных аппаратов | 2024 |
|
RU2831455C1 |
| Авиационный комплекс короткого взлета и посадки скоростного летательного аппарата | 2023 |
|
RU2835697C2 |
| УСТРОЙСТВО ДЛЯ ВЗЛЕТА И ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2694251C2 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2020 |
|
RU2754278C1 |
| СПОСОБ ОБСЛУЖИВАНИЯ КОСМИЧЕСКИХ ОБЪЕКТОВ И МНОГОРАЗОВАЯ АВИАЦИОННО-КОСМИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2342288C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2009 |
|
RU2403182C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |


Изобретение относится к авиации, преимущественно к устройствам для обеспечения взлета беспилотных летательных аппаратов. Цель изобретения упрощение конструкции при обеспечении вертикального взлета. Система состоит из нескольких самолетов 1 и 2 и соединяющего его средства 7, которое соединяет концы консолей крыльев 5 и 6 самолетов группы. Самолеты 1 и 2 в группе ориентированы для движения по кругу в одном направлении. Средство 7 при включении двигателей удерживает движущиеся самолеты в группе, а после подъема системы на требуемую высоту расфиксируется и освобождает самолеты 1 и 2 для дальнейшего полета. 3 з. п. ф-лы, 5 ил.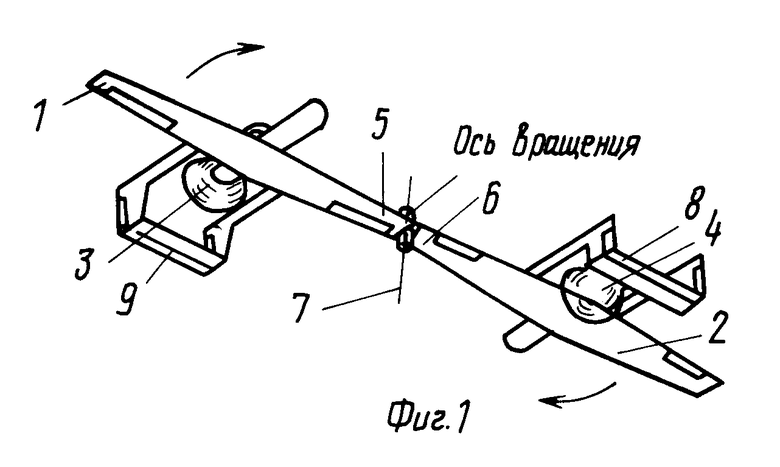
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ (ВАРИАНТЫ) | 2009 |
|
RU2409763C2 |
