Изобретение относится к судостроению, в частности к системам автоматического управления движением судна на подводных крыльях (СПК).
Известна система автоматического управления движением судна на подводных крыльях, использующая в качестве входных сигналов реакции судна, углы крена, дифферента, их угловые скорости и перегрузки [1]
Данной системе присущ недостаток, заключающийся в том, что управляющий сигнал вырабатывается от реакции судна и запаздывает по времени. Эффект от применения такой системы невелик, тем более, что она не может парировать удары корпуса о волну как не укладывающиеся в статистические закономерности стационарного движения.
Система, принятая в качестве прототипа [2] содержит гидровертикаль, вырабатывающую сигналы кинематических параметров движения, датчик скорости движения и датчик заглубления крыла, электрически связанные со счетно-решающим устройством, электрически связанным с исполнительным механизмом устройства управления подъемной силой крыла. Эта система (рассматривается только продольное движение) в качестве входных сигналов рассматривает Ψ -дифферент, Y высоту центра тяжести (ц. т.) относительно невозмущенного уровня, H высоту ц. т. относительно возмущенного уровня, V линейную скорость перемещения.
По дифференту и высоте управляющие сигналы имеют структуру: для носовых крыльев σн= f1(H,  ,
,  ,
,  ) для кормового крыла σк= f2(Ψ,
) для кормового крыла σк= f2(Ψ,  , H,
, H,  )
)
Эта система, использующая в качестве входных параметров реакции судна в данный момент времени, показала удовлетворительные качества для опытного судна с глубокопогруженными крыльями при высоком клиренсе, исключающем удары волны с корпусом. Эта система удовлетворительно работает при высоте волны меньшей, чем клиренс. Для СПК с малопогруженными крыльями эта система не может обеспечить удовлетворительные качества на большой волне.
Цель изобретения разработка системы, пригодной и для СПК с малопогруженными крыльями, обеспечивающей высокое качество стабилизации с возможностью адаптации к волнению различного спектра.
Цель достигается тем, что известная система снабжена датчиком изменения текущей высоты волны, установленным перед носовым крыльевым устройством и электрически связанным со счетно-решающим устройством. В качестве стабилизируемого параметра принимается прогнозируемая через время Δ t подъемная сила на носовом крыле. Это является принципиальным, ибо Pyconst обеспечивает движение без перегрузок, а запас времени позволяет предвидеть неблагоприятные ситуации.
На чертеже изображена система автоматического управления движением судна на подводных крыльях.
Корпус судна 1 снабжен подводными крыльями 2, которые имеют устройство управлением подъемной силой на крыле 3 (как более простое на схеме изображены закрылки). Система автоматического управления движением состоит из гидровертикали 4, вырабатывающей сигналы кинематических параметров движения, датчика 5 заглубления крыла 3, датчика 6 текущей волны, располагаемая на носу судна на расстоянии l от носового крыла, датчика 7 текущей скорости относительно воды. Все датчики электрическими связями 8 соединены со счетно-решающим устройством 9, которое электрически связано с исполнительным механизмом 10 управления подъемной силой крыла 3.
Система работает следующим образом.
Описывается продольное движение на волнении, для других каналов используются аналогичные процедуры. Судно устойчиво движется на тихой воде с начальными кинематическими параметрами: Vо скорость хода; Ψo угол дифферента; ho углубление носового крыла; βo положение закрылка.
При этих параметрах на крыле 3 возникает оптимальная подъемная сила:
Pyo=f(Vo, Ψo, ho, βo ).
При движении на волнении эти параметры в некоторое фиксированное время t изменяются и будут:
vt, Ψt,  , ht, βo, а подъемная сила изменится и будет
, ht, βo, а подъемная сила изменится и будет
Pyt= f(vt, Ψt,  , ht, βo)
, ht, βo)
Можно бы стабилизировать эту величину, но учитывая, что волнение постоянно меняется, целесообразно стабилизировать силу Py в момент через время Δ t, когда измеренная высота волны окажется в плоскости крыла Δ t=l/Vt
В момент t+ Δ t все параметры станут:
Vt=const,
Ψt+Δt Ψt+
 =
=  +f2(Δt)
+f2(Δt)
ht+Δt=ht+f3(hb,l,Vt).
Тогда подъемная сила на крыле 3 в момент Δ+ Δt будет:
Pyt+Δt= ϕ(Ut, Ψt+ ,
,  +Δt, ht+Δt, βo)
+Δt, ht+Δt, βo)
После определения скорости подъемных сил Pyo и Pt+Δt
Δ Pо= Рyo-Py(t+ Δ t) определится угол перекладки закрылка для создания силы с обратным знаком Δ Py=ϕ2(Δβ). Вычислитель дает сигнал исполнительному механизму 10 по повороту закрылка на угол Δβ, чтобы в момент времени t+ Δ t на крыле 3 возникла сила Pyo.
Если реальная сила, определенная по фактическим параметрам в момент t+ Δt, будет отличаться от прогнозируемой, то вводится поправочный коэффициент:
K  , который вводится в формулу для определения Pt+Δtпрочн для следующего момента времени.
, который вводится в формулу для определения Pt+Δtпрочн для следующего момента времени.
После нескольких вычислений К он должен стабилизироваться и для параметров движения V, hволны и курсового угла быть постоянным.
При поддержании постоянной подъемной силы на носовом крыле 3 параметры продольной качки, перегрузки и нагрузки на крыло будут минимальными.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДНО НА ПОДВОДНЫХ КРЫЛЬЯХ | 1991 |
|
RU2046050C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 1970 |
|
SU262644A1 |
| ПАНЕЛЬ ОБШИВКИ СКОРОСТНОГО СУДНА | 2008 |
|
RU2380270C1 |
| ПАРУСНОЕ СУДНО | 1991 |
|
RU2031049C1 |
| СУДНО НА ПОДВОДНЫХ КРЫЛЬЯХ | 2010 |
|
RU2434778C1 |
| ДВУХКОРПУСНОЕ СУДНО НА ПОДВОДНЫХ КРЫЛЬЯХ | 1991 |
|
RU2048366C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ДВИЖЕНИЯ СУДОВ | 2000 |
|
RU2225314C2 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| ГЛИССИРУЮЩЕЕ СУДНО | 2000 |
|
RU2165865C1 |
| КРЫЛЬЕВОЕ УСТРОЙСТВО СУДОВ НА ПОДВОДНЫХ КРЫЛЬЯХ | 1998 |
|
RU2148519C1 |
Использование: в судостроении. Сущность изобретения: система автоматического управления движением судна на подводных крыльях содержит гидровертикаль 4, вырабатывающую сигналы кинематических параметров движения, датчик 5 заглубления крыла 3, датчик 6 текущей высоты волны, располагаемый на носу судна, и датчик 7 текущей скорости относительно воды. Все датчики электрическими связями 8 соединены со счетно-решающим устройством 9, которое электрически связано с исполнительным механизмом 10 управления подъемной силой крыла 3. 1 ил.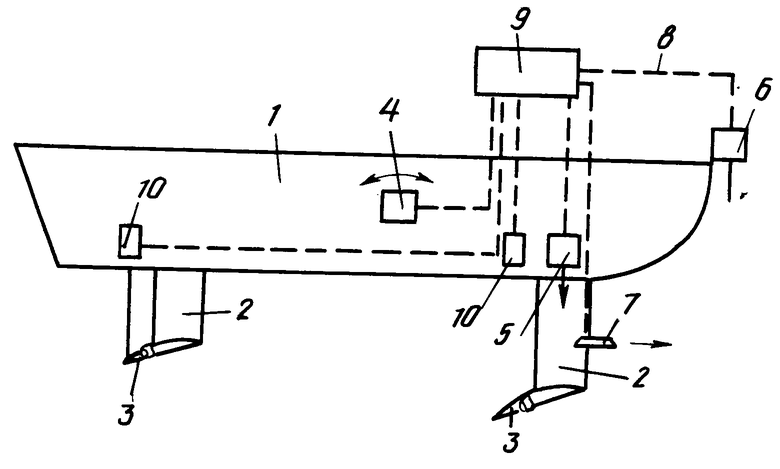
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ, содержащая гидровертикаль, вырабатывающую сигналы кинематических параметров движения, датчик скорости движения и датчик заглубления крыла, электрически связанные со счетно-решающим устройством, электрически связанным с исполнительным механизмом устройства управления подъемной силой крыла, отличающаяся тем, что она снабжена датчиком изменения текущей высоты волны, установленным перед носовым крыльевым устройством и электрически связанным со счетно-решающим устройством.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Судостроение, 1975, N 1, с.44 - 49. | |||
