Изобретение относится к автоматике, в частности к устройству для управления исполнительными механизмами робота-манипулятора, и может быть использовано в технологических процессах с участием роботов-манипуляторов.
Известны технические решения, которые можно было бы использовать при решении поставленной технической задачи.
В первом из известных технических решений сделана попытка реализовать управление территориально-распределенными объектами по автономным сетям связи.
Устройство содержит регистры сообщений, входы которых соединены с клавиатурой пульта управления, с синхронизатором и блоком управления выдачей команд, приемные регистры, входы которых являются входами устройства, дешифратор и блок индикации, фиксирующий номер объекта, находящегося на связи.
Недостаток этого устройства состоит в его ограниченных функциональных возможностях, обусловленных локальными особенностями пункта управления.
Наиболее близким к предлагаемому является устройство, содержащее триггеры, выходы которых соединены с входами соответствующих элементов И группы, выходы которых соединены с входами первого блока памяти, выходы которого соединены с информационными входами регистров, второй блок памяти, адресный вход которого подключен к выходу сумматора, а вход считывания к выходу первого элемента И, соединенного с выходом первого элемента задержки, счетчик, счетный вход которого подключен к выходу первого элемента И, а выход соединен с одними информационными входами сумматора и компаратора, другие информационные входы которых соединены с выходами соответствующих регистров, первый элемент ИЛИ, вход которого соединен с выходами элементов задержки группы, а выход подключен к одному входу второго элемента ИЛИ, другой вход которого соединен с усилителем-формирователем, а выход подключен к второму элементу задержки, третий и четвертый элементы ИЛИ.
Недостаток устройства состоит в ограниченных функциональных возможностях и ограниченной области применения, обусловленных тем, что известное техническое решение реализует лишь функции передачи команд управления.
Цель изобретения расширение функциональных возможностей и области применения путем реализации функции анализа данных о работе приводов робота-манипулятора и формирования сигналов его защиты от поломки.
Цель достигается тем, что в известное устройство, содержащее блок памяти, адресный вход которого соединен с выходом счетчика, а выход является первым информационным выходом системы, первый регистр, нулевой вход которого подключен к выходу первого элемента ИЛИ, триггер, нулевой вход которого соединен с выходом второго элемента ИЛИ, первый элемент задержки, вход которого подключен к выходу второго элемента задержки, второй регистр, первая группа элементов И и третий элемент ИЛИ, введены первый дешифратор, информационный вход которого соединен с первым выходом первого регистра, а выходы подключены к одним входам элементов И первой группы, третий элемент задержки, вход которого является первым синхронизирующим входом устройства, а выход соединен с другими входами элементов И первой группы, второй дешифратор, информационный вход которого подключен к первому выходу второго регистра, синхронизирующий вход которого является вторым синхронизирующим входом устройства и подключен к входу второго элемента задержки, группа элементов ИЛИ, входы которых соединены с вторыми выходами первого и второго регистров, а выходы подключены к информационному входу блока памяти, вход управления записью которого соединен с выходом третьего элемента ИЛИ, входы которого подключены к выходам первого и второго элементов И первой группы, вторая группа элементов И, одни входы которых соединены с вторым выходом первого регистра, другие подключены к выходу второго элемента И первой группы, а выходы являются вторым информационным выходом устройства, третья группа элементов И, входы которых соединены с вторым выходом второго регистра, с выходом второго элемента задержки, с соответствующими выходами второго дешифратора и с прямым выходом триггера, единичный вход которого подключен к выходу третьего элемента И первой группы, соединенному с одним входом первого элемента ИЛИ, другой вход которого подключен к выходу третьего элемента ИЛИ, при этом счетный вход счетчика является третьим синхронизирующим входом устройства, входы второго элемента ИЛИ подключены к выходу первого элемента задержки и к первому синхронизирующему входу устройства, который соединен с синхронизирующим входом первого регистра, информационный вход которого является первым информационным входом устройства, выход первого элемента задержки соединен с нулевым входом второго регистра, информационный вход которого является вторым информационным входом устройства.
Анализ известных технических решений в соответствии с поставленной задачей показал, что свойства предлагаемого объекта, обусловленные совокупностью существенных признаков, не совпадают со свойствами известных технических решений, что позволяет сделать вывод о том, что предлагаемое устройство обладает существенными отличиями.
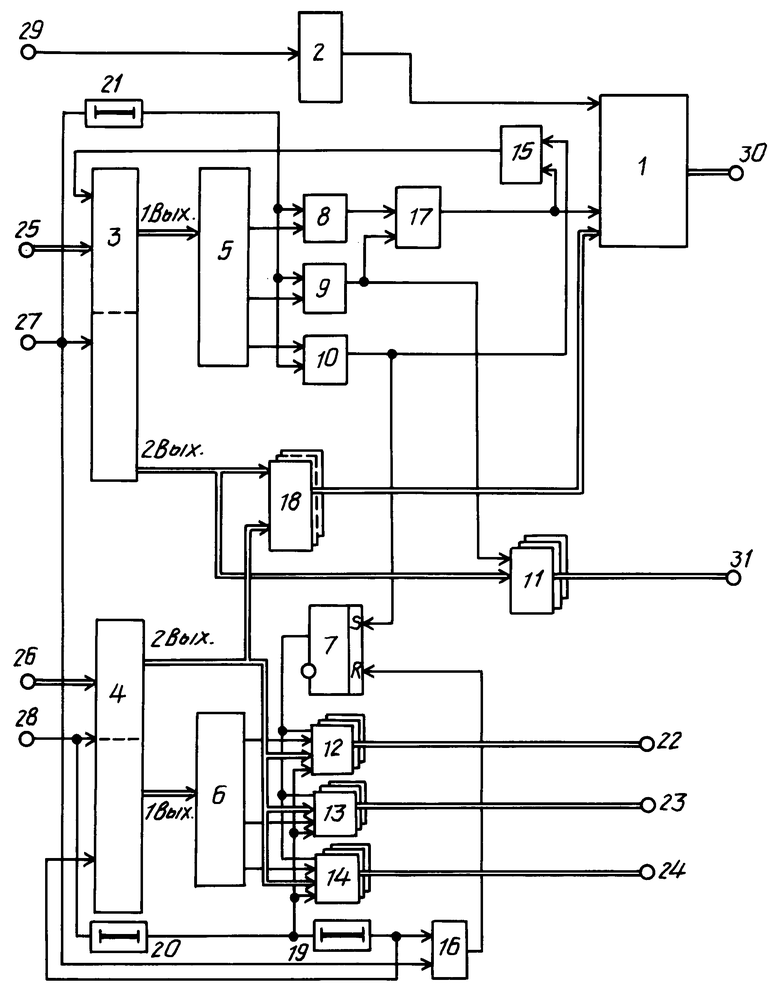
На чертеже показана блок-схема предлагаемого устройства.
Устройство включает блок памяти 1, выполненный в виде оперативного запоминающего устройства, счетчик 2 импульсов времени, считающий до суток (24 ч) с заданным временным интервалом, например в 1 мин, импульсы поступающие на его вход, первый 3 и второй 4 регистры, первый 5 и второй 6 дешифраторы, триггер 7 блокировки, первый 8, второй 9 и третий 10 элементы И первой группы, элементы 11 И второй группы, элементы 12-14 И третьей группы, первый 15, второй 16 и третий 17 элементы ИЛИ, группа 18 элементов ИЛИ, первый 19, второй 20 и третий 21 элементы задержки. Кроме того, имеются выходы 22-24, входы 25-29, выходы 30-31.
Все блоки и узлы устройства выполнены в виде стандартных функционально-самостоятельных узлов и элементов, подробно описанных в книге Потемкина И. С. Функциональные узлы цифровой автоматики. Энергоатомиздат, 1988, с.45-262.
Устройство работает следующим образом.
На информационный вход 25 устройства поочередно с заданным интервалом времени поступают сообщения о режиме работы исполнительных механизмов робота-манипулятора, структура которых имеет следующий вид:
Код номера Код режима, в котором
исполнительного механизма работает испол. механизм
Эти сообщения синхронизирующим импульсом с входа 27 заносятся в регистр 3. Дешифратор 5 расшифровывает код режима и в зависимости от его вида открывает либо элемент 10 И, если режим работы исполнительного механизма в норме, либо элемент 8 И, если в режиме работы обнаружены изменения, связанные с программой работы робота-манипулятора, либо элемент 9 И, если в режиме работы обнаружены отклонения, не предусмотренные программой работы робота-манипулятора.
Если будет открыт элемент 8 И, то импульсом входа 27, задержанным элементом 21 на время срабатывания регистра 3 и дешифратора 5, и прошедшим через элемент 17 ИЛИ на вход управления записью блока 1, содержимое информационного сообщения со второго выхода регистра 3, записывается через элементы 18 ИЛИ в ячейку памяти блока 1, адрес которой в данный момент определяется показанием счетчика импульсов времени 2.
В результате этого в блоке памяти 1 по адресу, сформированному счетчиком 2, будут фиксироваться все изменения режимов работы исполнительных механизмов робота-манипулятора.
Если же дешифратор 5 откроет элемент 9 И, то импульс с выхода элемента 21 задержки проходит через элемент 9 И и 17 ИЛИ, во-первых, записывает сообщение в память блока 1, а во-вторых, этот же импульс поступает на вход группы элементов 11 И и переписывает содержимое регистра 3 через элемент 11 И на выход 31 устройства, из которого оно поступает в систему формирования сигналов защиты исполнительных механизмов от поломки.
Если же дешифратор 5 откроет элемент 10 И, то импульс с выхода элемента задержки 21 пройдет элемент 10 И, и во-вторых, через элементы 15 ИЛИ сбросит регистр 3 в исходное состояние, а во-вторых, поступает на прямой вход триггера блокировки, который устанавливается в единичное состояние и открывает по одному входу элементы 12-14 И, тем самым обеспечивается возможность формирования и передачи соответствующему исполнительному механизму робота-манипулятора соответствующего сообщения по изменению режима работы.
Структура формируемого сообщения имеет следующий вид:
Код номера Код номера
исполнительного механизма режима
Сформированный код поступает на информационный вход 26 регистра 4, куда заносится синхроимпульсом с входа 28. Дешифратор 6 расшифровывает код адреса и на одном из своих выходов открывает одну из групп 12-14 элементов И, на другие входы которых подается информационные сообщения с второго выхода регистра 4. Тот же импульс синхронизации с входа 28, задержанный на время срабатывания регистра 4 и дешифратора 6, поступает на открытые элементы И одной из групп 12-14 и переписывает содержимое кодограммы через соответствующие выходы 22-24, на управляющие входы соответствующего исполнительного механизма.
После передачи кодограммы в адрес выбранного объекта тот же импульс с выхода элемента 19 задержки поступает на нулевой вход регистра 4 и через элемент 16 ИЛИ на нулевой вход триггера блокировки 7, возвращая его в исходное состояние.
Если же к приходу очередной кодограммы на вход устройства никаких изменений режима работы исполнительных механизмов не осуществлялось, то импульс синхронизации очередной кодограммы с входа 27 поступит через элемент 16 ИЛИ на нулевой вход триггера 7 и вернет его в исходное состояние.
Таким образом, введение новых узлов и блоков позволило существенно расширить функциональные возможности и область применения заявленной системы по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознавания образов | 1991 |
|
SU1798806A1 |
| Устройство для идентификации признаков объектов | 1989 |
|
SU1626258A1 |
| Устройство для формирования координат траекторий движения объектов | 1988 |
|
SU1721625A1 |
| СИСТЕМА УПРАВЛЕНИЯ КОНВЕРТАЦИЕЙ ДАННЫХ В ИНФОРМАЦИОННОЙ СЕТИ ГОСУДАРСТВЕННОГО РЕГИСТРА НАСЕЛЕНИЯ | 2003 |
|
RU2251727C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПЕРЕДАЧИ ДАННЫХ ГОСУДАРСТВЕННОГО РЕГИСТРА НАСЕЛЕНИЯ | 2004 |
|
RU2280280C1 |
| Устройство для контроля работы оператора | 1990 |
|
SU1718263A2 |
| СИСТЕМА АНАЛИЗА И ОБРАБОТКИ ИНФОРМАЦИИ ОБ ИННОВАЦИОННОМ ПОТЕНЦИАЛЕ ДЛЯ УПРАВЛЕНИЯ ПРИБОРОСТРОИТЕЛЬНЫМ ПРЕДПРИЯТИЕМ | 2016 |
|
RU2619718C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВЕДЕНИЯ СУДЕБНОГО И ИСПОЛНИТЕЛЬНОГО ДЕЛОПРОИЗВОДСТВА | 2006 |
|
RU2305318C1 |
| Устройство для идентификации кодограмм-сообщений | 1990 |
|
SU1805481A1 |
| Устройство для контроля работы оператора | 1989 |
|
SU1619330A1 |
Использование: при создании дистанционно управляемых роботов-манипуляторов. Сущность изобретения: устройство содержит два дешифратора, четыре группы элементов И, группу элементов ИЛИ и элемент задержки, которые обеспечивают расширение фрикционных возможностей устройства за счет обеспечения анализа состояния работы. 1 ил.
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РОБОТОМ МАНИПУЛЯТОРОМ, содержащее последовательно соединенные счетчик и блок памяти, выход которого подключен к первому выходу устройства, последовательно соединенные первый элемент ИЛИ и первый регистр, последовательно подключенные второй элемент ИЛИ и триггер, последовательно соединенные первый и второй элементы задержки, а также второй регистр, третий элемент ИЛИ, первый, второй и третий элементы И, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит первый и второй дешифраторы, четвертые, пятые, шестые и седьмые элементы И, четвертые элементы ИЛИ и третий элемент задержки, выход которого соединен с первым входом первого, второго и третьего элемента И, а вход с вторым входом первого регистра, первым входом устройства и второго элемента ИЛИ, подключенного вторым входом к выходу второго элемента задержки и первому входу второго регистра, второй вход которого соединен с входом первого элемента задержки и вторым входом устройства, третьи входы с третьими входами устройства, первые выходы с первым входом соответствующего четвертого элемента ИЛИ и пятого, шестого и седьмого элементов И, а вторые выходы с входами второго дешифратора, подключенного первым, вторым и третьим выходами к второму входу соответственно пятых, шестых и седьмых элементов И, третий вход каждого из которых соединен с выходом триггера, подключенного вторым входом к выходу третьего элемента И и первому входу первого элемента ИЛИ, второй вход которого соединен с вторым входом блока памяти и выходом третьего элемента ИЛИ, подключенного первым входом к первому входу четвертых элементов И и выходу второго элемента И, а вторым входом к выходу первого элемента И, четвертый вход устройства соединен с входом счетчика, а пятые входы с третьими входами первого регистра, первые выходы которого подключены к второму входу соответствующего четвертого элемента И и ИЛИ, а вторые выходы к входам первого дешифратора, соединенного первым, вторым и третьим выходами с вторым входом соответственно первого, второго и третьего элементов И, выходы четвертых элементов ИЛИ подключены к третьим входам блока памяти, а вторые, третьи, четвертые и пятые выходы устройства соединены соответственно с выходами четвертых, пятых, шестых и седьмых элементов И.
| Устройство программного управления | 1988 |
|
SU1587504A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
