Изобретение относится к автоматике, в частности к устройствам, обеспечивающим отображение траекторий движения обрабатываемых объектов в технологических процессах с использованием роботов-конт- роллеров.
Целью изобретения является повышение точности устройства.
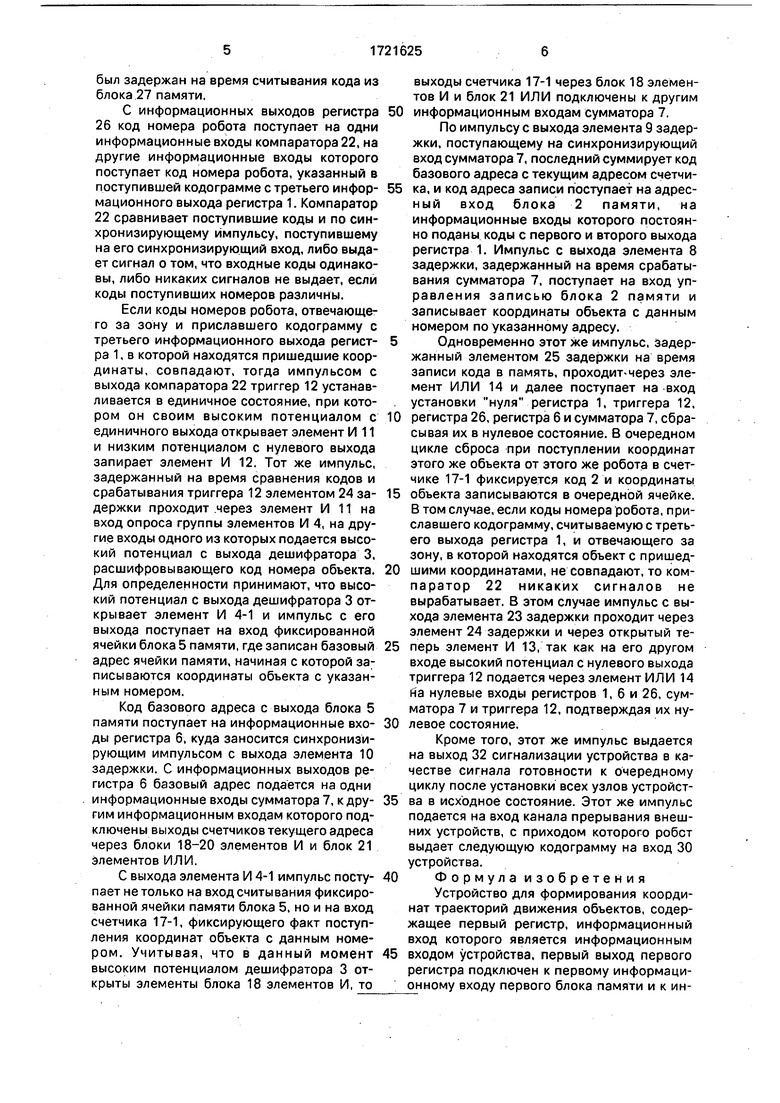
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - пример распределения содержимого ячеек памяти, в которые заносится исходная информация, используемая для формирования траекторий движения объектов в технологической зоне.
Устройство содержит первый регистр 1, первый блок 2 памяти, первый дешифратор 3, первую группу 4 элементов И, второй блок 5 памяти, второй регистр 6, сумматор 7, первый 8, второй 9 и третий 10 элементы задержки, первый элемент И 11, триггер 12, второй элемент И 13, элемент ИЛИ 14, четвертый 15 и пятый 16 элементы задержки, блок 17 счетчиков, первый 18, второй 19 и третий 20 блоки элементов И, блок 21 эле- ментов ИЛИ, компаратор 22, шестой 23, седьмой 24 и восьмой 25 элементы задержки, третий регистр 26, третий блок 27 памяти, вторую группу 28 элементов И и второй дешифратор 29.
Кроме того, устройство имеет информационный вход 30 синхронизирующий вход 31, выход 32 сигнала готовности устройства, а также информационный выход 33.
Все зоны наблюдения, в пределах кото- рых работают реальные роботы-контроллеры - источники информации, жестко закрепляются за этими роботами. Информация об обрабатываемом технологическом объекте, состоит из номера объекта, номера робота-контроллера и изменяющихся координат местоположения объекта (фиг. 2), причем номер объекта, присваиваемый каждым роботом-контроллером, может быть у одних и тех же объектов одинаков, ибо нумерация объектов осуществляется по единой технологической сетке. Перед началом работы
вся информация, необходимая для отображения траекторий движения объектов, записывается в память робота (вне устройства) в том порядке, в котором она поступает от каждого из роботов (фиг. 2).
Устройство работает следующим образом.
В исходном состоянии все блоки и элементы установлены в нулевое состояние(цепи установки в исходное состояние для упрощения на фиг. 1 не показаны). На информационные выходы устройства 30 с выхода робота (не показано) поступает кодограмма определенного вида (фиг. 2). Импульсом синхронизации, также поступающим на вход 31, поступившее сообщение заносится в регистр 1. Первый выход регистра 1 подключен к входу дешифратора 3, который расшифровывает номер объекта, а второй подключен к входу дешифратора 28, который, расшифровывая координаты X и Y объекта, однозначнсГопределяет номер робота-контроллера, в зоне ответственности которого должен находиться объект с заданными координатами.
В результате такого подключения дешифратор 29 на одном из своих выходов формирует высокий потенциал, соответствующий входному коду, который открывает один из элементов И 28.1-28.3 по потенциальному входу. Принимают, что таким элементом является элемент И 28-1. На другой вход этого элемента с выхода элемента 15 задержки поступает импульс, задержанный на время срабатывания регистра 1 и дешифратора 29. Этот импульс проходит через элемент И 28-1 и поступает на вход считывания ячейки блока 27 памяти, в которой постоянно записан номер робота-контроллера, ответственного за ту зону обнаружения, в пределах которой находится объект с поступившими координатами X и Y.
Код номера указанного робота-контроллера с выходов блока 27 памяти поступает на информационные входы регистра 26, куда заносится синхронизирующим импульсом с выхода элемента 16 задержки, где он
был задержан на время считывания кода из блока 27 памяти.
С информационных выходов регистра 26 код номера робота поступает на одни информационные входы компаратора 22, на другие информационные входы которого поступает код номера робота, указанный в поступившей кодограмме с третьего информационного выхода регистра 1. Компаратор 22 сравнивает поступившие коды и по синхронизирующему импульсу, поступившему на его синхронизирующий вход, либо выдает сигнал о том, что входные коды одинаковы, либо никаких сигналов не выдает, если коды поступивших номеров различны.
Если коды номеров робота, отвечающего за зону и приславшего кодограмму с третьего информационного выхода регистра 1, в которой находятся пришедшие координаты, совпадают, тогда импульсом с выхода компаратора 22 триггер 12 устанавливается в единичное состояние, при котором он своим высоким потенциалом с единичного выхода открывает элемент И 11 и низким потенциалом с нулевого выхода запирает элемент И 12, Тот же импульс, задержанный на время сравнения кодов и срабатывания триггера 1.2 элементом 24 задержки проходит .через элемент И 11 на вход опроса группы элементов И 4, на другие входы одного из которых подается высокий потенциал с выхода дешифратора 3, расшифровывающего код номера объекта. Для определенности принимают, что высокий потенциал с выхода дешифратора 3 открывает элемент И 4-1 и импульс с его выхода поступает на вход фиксированной ячейки блока 5 памяти, где записан базовый адрес ячейки памяти, начиная с которой за;- писываются координаты объекта с указанным номером.
Код базового адреса с выхода блока 5 памяти поступает на информационные входы регистра 6, куда заносится синхронизирующим импульсом с выхода элемента 10 задержки. С информационных выходов регистра 6 базовый адрес подается на одни информационные входы сумматора 7, к другим информационным входам которого подключены выходы счетчиков текущего адреса через блоки 18-20 элементов И и блок 21 элементов ИЛИ.
С выхода элемента И 4-1 импульс поступает не только на вход считывания фиксированной ячейки памяти блока 5, но и на вход счетчика 17-1, фиксирующего факт поступления координат объекта с данным номером. Учитывая, что в данный момент высоким потенциалом дешифратора 3 открыты элементы блока 18 элементов И, то
выходы счетчика через блок 18 элементов И и блок 21 ИЛИ подключены к другим
0 информационным входам сумматора 7.
По импульсу с выхода элемента 9 задержки, поступающему на синхронизирующий вход сумматора 7, последний суммирует код базового адреса с текущим адресом счетчи5 ка, и код адреса записи поступает на адрес- ный вход блока 2 памяти, на информационные входы которого постоянно поданы коды с первого и второго выхода регистра 1. Импульс с выхода элемента 8 задержки, задержанный на время срабатывания сумматора 7, поступает на вход управления записью блока 2 памяти и записывает координаты объекта с данным номером по указанному адресу.
Одновременно этот же импульс, задержанный элементом 25 задержки на время записи кода в память, проходит-через элемент ИЛИ 14 и далее поступает на вход . установки нуля регистра 1, триггера 12,
0 регистра 26, регистра 6 и сумматора 7, сбрасывая их в нулевое состояние. В очередном цикле сброса при поступлении координат этого же объекта от этого же робота в счетчике 17-1 фиксируется код 2 и координаты
5 объекта записываются в очередной ячейке. В том случае, если коды номера робота, приславшего кодограмму, считываемую с третьего выхода регистра 1, и отвечающего за зону, в которой находятся объект с пришед0 шими координатами, не совпадают, то компаратор 22 никаких сигналов не вырабатывает. В этом случае импульс с выхода элемента 23 задержки проходит через элемент 24 задержки и через открытый те5 перь элемент И 13, так как на его другом входе высокий потенциал с нулевого выхода триггера 12 подается через элемент ИЛИ 14 йа нулевые входы регистров 1, 6 и 26, сумматора 7 и триггера 12, подтверждая их ну0 левое состояние.
Кроме того, этот же импульс выдается на выход 32 сигнализации устройства в честве сигнала готовности к очередному циклу после установки всех узлов устройст5 ва в исходное состояние. Этот же импульс подается на вход канала прерывания внешних устройств, с приходом которого робот выдает следующую кодограмму на вход 30 устройства.
0 Формула изобретения
Устройство для формирования координат траекторий движения объектов, содержащее первый регистр, информационный вход которого является информационным
5 входом устройства, первый выход первого регистра подключен к первому информационному входу первого блока памяти и к информационному входу первого дешифратора, первый, второй и третий выходы которого подключены к первым информационным входам элементов И первой группы, выходы которых подключены к адресным входам второго блока памяти, выход которого подключен к информационному входу второго регистра, выход которого подключен к первому информационному входу сумматора, выход которого подключен к адресному входу первого блока памяти, выход которого является информационным выходом устройства, второй информационный вход первого блока памяти подключен к второму выходу первого регистра, вход управления записью первого блока памяти подключен к выходу первого элемента задержки, информационный вход которого подключен к выходу второго элемента задержки, соединенному с синхронизирующим входом сумматора, информационный вход второго элемента задержки подключен k выходу третьего элемента задержки, соединенному с синхронизирующим входом второго регистра, информационный вход третьего элемента задержки подключен к выходу первого элемента И, подключенному к вторым информационным входам элементов И первой группы, первый информационный вход первого элемента И подключен к прямому выходу триггера, инверсный выход которого подключен к первому информационному входу второго элемента И, выход которого подключен к первому информационному входу элемента ИЛИ, выход которого подключен к входам установки нуля сумматора, первого регистра и второго регистра, синхронизирующий вход первого регистра является синхронизирующим входом устройства, соединенным с информационным входом четвертого элемента задержки, выход которого подключен к информационному входу пятого элемента задержки, отличающееся тем, что, с целью повышения точности устройства, в него введены блок счетчиков, первый, второй и третий блок элементов И, блок элементов ИЛИ, компаратор, шестой, седьмой и восьмой элементы задержки, третий регистр, третий блок памяти, вторая
группа элементов И и второй дешифратор, информационный вход которого подключен к второму выходу первого регистра, первый, второй и третий выходы второго дешифратора подключены к первым информационным входам элементов И второй группы вторые входы которых подключены к выходу четвертого элемента задержки, выходы элементов И второй группы подключены к адресным входам третьего блока памяти, выход которого подключен к информационному входу третьего регистра, синхронизирующий вход которого подключен к выходу пятого элемента задержки, соединенного с
информационным входом шестого элемента задержки, выход которого подключен к информационному входу седьмого элемента задержки, выход которого подключен к вторым информационным входам первого и
второго элементов И, выход третьего регистра подключен к первому информационному входу компаратора, второй информационный вход которого подключен к третьему выходу первого регистра, синхронизирующий вход компаратора подключен к выходу шестого элемента задержки, выход компаратора подключен к установочному входу триггера, вход сброса которого подключен к выходу элемента ИЛИ, являющегося выходом сигнала готовности устройства и соединенного с входом установки нуля третьего регистра, второй информационный вход элемента ИЛИ подключен к выходу восьмого элемента задержки, информационный вход которого подключен к выходу первого элемента задержки, первый, второй и третий выходы первого дешифратора подключены к первым информационным входам первого, второго и третьего блоков
элементов И, вторые информационные входы которого подключены к выходам соответственно первого, второго и третьего блоков счетчиков, счетные входы которых подключены к соответствующим выходам элементов И первой группы, выходы первого, второго и третьего блоков элементов И подключены к информационным входам блока элементов ИЛИ, выход которого подключен к второму информационному входу сумматора.
| Нолер осЬыта
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для идентификации кодограмм-сообщений | 1990 |
|
SU1805481A1 |
| Устройство для автоматизированного управления технологическим процессом водоснабжения города | 1986 |
|
SU1381431A1 |
| Устройство для идентификации признаков объектов | 1989 |
|
SU1626258A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РОБОТОМ - МАНИПУЛЯТОРОМ | 1989 |
|
RU2044619C1 |
| Устройство для идентификации объектов | 1988 |
|
SU1647605A1 |
| АВТОМАТИЗИРОВАННАЯ ИНФОРМАЦИОННАЯ СИСТЕМА СУДЕБНОГО ДЕЛОПРОИЗВОДСТВА | 2005 |
|
RU2291480C1 |
| Устройство для контроля работы оператора | 1990 |
|
SU1718263A2 |
| Устройство для распознавания образов | 1989 |
|
SU1605268A1 |
| Устройство для определения координат подвижных объектов | 1988 |
|
SU1580408A1 |
| СИСТЕМА УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ ДАННЫХ В ИНФОРМАЦИОННОЙ СЕТИ ГАС "ВЫБОРЫ" | 2003 |
|
RU2239229C1 |
Изобретение относится к автоматике, в частности к устройствам, обеспечивающим отображение траектории движения обрабатываемых объектов в технологических процессах с использованием роботов-контроллеров. Целью изобретения является повышение точности устройства. Для этого в устройство, содержащее первый .1 и второй 6 резисторы, первый 2 и второй 5 блоки памя
1
2
$иг. 2.
f
| Устройство для моделирования структурно-сложных объектов | 1984 |
|
SU1234845A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для управления вызовом информации | 1985 |
|
SU1300540A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
