Изобретение относится к виброметрии и может быть применено для физического моделирования звеньев вибродвигателя.
Наиболее близким к предлагаемому является устройство, содержащее ротор вибродвигателя, вибратор, два усилителя, первый блок деления, фазометр, блок оптимизации, генератор гармонического сигнала, блок обратной передаточной функции вибратора, блок регистрации и датчик силы, установленный между подвижной частью вибратора и ротором вибродвигателя и соединенный с входом первого усилителя и первым входом фазометра, выход которого соединен с входом блока оптимизации и первым входом блока регистрации, выход блока оптимизации соединен с управляющим входом генератора гармонического сигнала, выход которого подключен к второму входу блока регистрации и входу блока обратной передаточной функции вибратора, выход которого соединен с входом вибратора, выход первого усилителя подключен к входу делимого первого блока деления, вход делителя которого соединен с выходом второго усилителя, выход первого блока деления подключен к третьему входу блока регистрации (авт.св. СССР N 894742, кл. G 06 G 7/48, 1981).
Недостатком известного устройства является низкая точность моделирования параметров вибродвигателя из-за малой информативности измерений.
Цель изобретения повышение точности моделирования параметров вибродвигателя за счет увеличения информативности измерений.
Поставленная цель достигается тем, что в устройство для моделирования параметров вибродвигателя, содержащее ротор вибродвигателя, вибратор, два усилителя, первый блок деления, фазометр, блок оптимизации, генератор гармонического сигнала, блок обратной передаточной функции вибратора, блок регистрации и датчик силы, установленный между подвижной частью вибратора и ротором вибродвигателя и соединенный с входом первого усилителя и первым входом фазометра, выход которого соединен с входом блока оптимизации и первым входом блока регистрации, выход блока оптимизации соединен с управляющим входом генератора гармонического сигнала, выход которого подключен ко второму входу блока регистрации и входу блока обратной передаточной функции вибратора, выход которого соединен с входом вибратора, выход первого усилителя подключен к входу делимого первого блока деления, вход делителя которого соединен с выходом второго усилителя, выход первого блока деления подключен к третьему входу блока регистрации, дополнительно введены датчик ускорения, два интегратора, два усилителя и два блока деления, причем датчик ускорения, установленный на подвижной части вибратора, соединен с входом третьего усилителя и входом первого интегратора, выход которого соединен с входом второго усилителя, вторым входом фазометра и входом второго интегратора, выход которого через четвертый усилитель подключен к входу делителя блока деления, выход первого усилителя подключен к входам делимого соответственно второго и третьего блоков деления, выход третьего усилителя соединен с входом делителя третьего блока деления, выходы второго и третьего блоков деления подключены соответственно к четвертому и пятому входам блока регистрации.
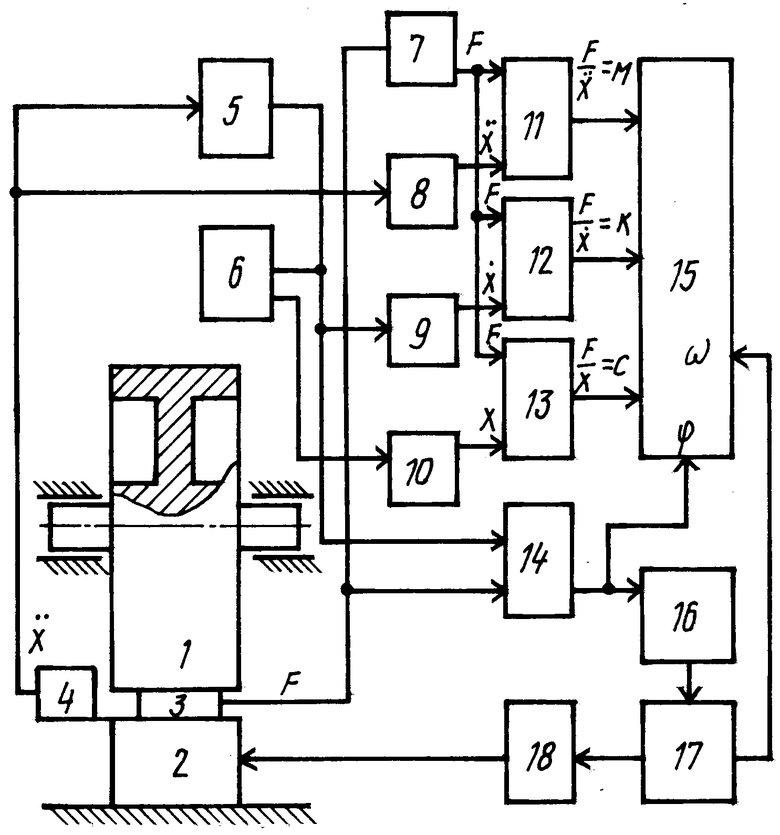
На чертеже показана схема предлагаемого устройства.
Устройство содержит ротор вибродвигателя 1, вибратор 2, датчик 3 силы, размещенный между ротором 1 и вибратором 2, датчик ускорения 4, расположенный на подвижной части вибратора, первый 5 и второй 6 интеграторы, первый 7, второй 8, третий 9 и четвертый 10 усилители, первый 12, второй 13 и третий 11 блоки деления, фазометр 14, причем выход датчика ускорения 4 соединен со входами первого 5 интегратора и третьего 9 усилителя, а выход датчика силы 3 подключен ко входу первого 7 усилителя и первому входу фазометра 14, выход первого 7 усилителя соединен с входами делимого соответственно первого 12, второго 13 и третьего 11 блоков деления, выход первого 5 интегратора соединен со входом второго 8 усилителя, вторым входом фазометра 14 и второго 6 интегратора, выход которого подключен ко входу четвертого 10 усилителя. Выход второго 8, третьего 9 и четвертого 10 усилителей соединены с входами делителей соответственно первого 12, третьего 11 и второго 13 блоков деления. Выход фазометра 14 подключен к первому входу блока регистрации 15 и входу блока оптимизации 16, выход которого соединен с генератором 17 гармонического сигнала, соединены с блоком 18 обратной передаточной функции вибратора и вторым входом блока регистрации 15, к третьему, четвертому и пятому входам которого подключены выходы соответственного первого 12, второго 13 и третьего 11 блоков деления. Блок 18 обратной передаточной функции подключен ко входу вибратора 2.
Устройство работает следующим образом. Датчик 3 силы выдает сигнал, пропорциональный силе F взаимодействия между вибратором 2 и ротором 1 вибродвигателя, а датчик ускорения 4 выдает сигнал, пропорциональный ускорению  подвижной части вибратора 2. Сигнал ускорения
подвижной части вибратора 2. Сигнал ускорения  с выхода датчика 4 поступает на вход третьего 9 усилителя и на вход первого 5 интегратора. На выходе первого 5 интегратора формируется сигнал скорости
с выхода датчика 4 поступает на вход третьего 9 усилителя и на вход первого 5 интегратора. На выходе первого 5 интегратора формируется сигнал скорости  вибратора, поступающий на второй 6 интегратор, второй 8 усилитель и второй вход фазометра 14. Со второго 6 интегратора сигнал перемещения Х поступает на четвертый 10 усилитель.
вибратора, поступающий на второй 6 интегратор, второй 8 усилитель и второй вход фазометра 14. Со второго 6 интегратора сигнал перемещения Х поступает на четвертый 10 усилитель.
С выхода датчика 3 силы сигнал поступает на вход первого 7 усилителя и на первый вход фазометра 14. Сигнал с выхода первого 7 усилителя поступает на входы делимого блоков 11, 12 и 13 деления. С выхода второго 8 усилителя сигнал скорости  поступает на вход делителя первого 11 блока деления, на выходе которого формируется сигнал, пропорциональный отношению амплитудных значений F и
поступает на вход делителя первого 11 блока деления, на выходе которого формируется сигнал, пропорциональный отношению амплитудных значений F и  т.е. К F/
т.е. К F/ который равен модулю механического импеданса ротора 1 и отражает его диссипативные свойства. С выхода третьего усилителя 9 сигнал ускорения
который равен модулю механического импеданса ротора 1 и отражает его диссипативные свойства. С выхода третьего усилителя 9 сигнал ускорения  поступает на вход делителя третьего блока 13 деления, на выходе которого получается сигнал, пропорциональный отношению амплитудных значений F и
поступает на вход делителя третьего блока 13 деления, на выходе которого получается сигнал, пропорциональный отношению амплитудных значений F и  т.е. М F/
т.е. М F/  который соответствует инерционным характеристикам ротора 1. С выхода четвертого 10 усилителя сигнал перемещения Х поступает на вход делителя второго 12 блока деления, на выходе которого формируется сигнал, пропорциональный отношению амплитудных значений F и Х, т.е. C F/X, отражающий упругие свойства ротора 1.
который соответствует инерционным характеристикам ротора 1. С выхода четвертого 10 усилителя сигнал перемещения Х поступает на вход делителя второго 12 блока деления, на выходе которого формируется сигнал, пропорциональный отношению амплитудных значений F и Х, т.е. C F/X, отражающий упругие свойства ротора 1.
На выходе фазометра 14 образуется напряжение, пропорциональное разности фаз между силой F и скоростью  Этот сигнал поступает в блок оптимизации 16 и на первый вход блока регистрации 15. Блок оптимизации 16 служит для поиска минимума разности фаз между силой F и скоростью
Этот сигнал поступает в блок оптимизации 16 и на первый вход блока регистрации 15. Блок оптимизации 16 служит для поиска минимума разности фаз между силой F и скоростью  соответствующего наибольшему значению механического импеданса ротора 1 (авт.св.СССР N 894742, кл. G 06 G 7/48, 1981). Наибольшую эффективность пьезокерамический двигатель обеспечивает при работе в резонансном режиме, т.е. когда механический импеданс максимален. В связи с этим найденная частота при минимуме разности фаз (частота резонанса) является той частотой, на которой должен работать пьезодвигатель (Лавриненко В.В. и др. Пьезоэлектpические двигатели. М. Энергия, 1980, с.10-15).
соответствующего наибольшему значению механического импеданса ротора 1 (авт.св.СССР N 894742, кл. G 06 G 7/48, 1981). Наибольшую эффективность пьезокерамический двигатель обеспечивает при работе в резонансном режиме, т.е. когда механический импеданс максимален. В связи с этим найденная частота при минимуме разности фаз (частота резонанса) является той частотой, на которой должен работать пьезодвигатель (Лавриненко В.В. и др. Пьезоэлектpические двигатели. М. Энергия, 1980, с.10-15).
Блок оптимизации 16 управляет работой генератора 17 гармонического сигнала следующим образом. Если частота колебаний меньше резонансной, то блок оптимизации 16 увеличивает частоту генератора 17 гармонического сигнала. Пpи частоте колебаний выше резонансной блок оптимизации 16 уменьшает частоту генератора 17 гармонического сигнала. С генератора 17 сигнал поступает на второй вход блока регистрации 15 и через блок 18 обратной передаточной функции вибратора на вход вибратора 2. Блок 18 обратной передаточной функции вибратора выполняет роль корректирующего звена и позволяет получить на выходе вибратора 2 механические колебания заданного закона и амплитуды. С выходов первого 12, второй 13 и третьего 11 блоков деления сигналы, соответствующие диссипативным К, упругим С и инерционным М характеристикам анализируемого вибродвигателя, поступают на третий, четвертый и пятый входы блока регистрации 15.
Применение предлагаемого устройства позволяет расширить возможности полунатурного моделирования вибродвигателя за счет раздельной оценки инерционных, диссипативных и упругих характеристик. Расширение возможностей и повышение точности моделирования позволяет повысить мощность вибродвигателя и его КПД.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАПРЕССОВКИ ДЕТАЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2050244C1 |
| Устройство для моделирования вибродвигателя | 1980 |
|
SU894742A1 |
| ВИБРОДВИГАТЕЛЬ | 1991 |
|
RU2045124C1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ДЕТАЛЕЙ | 1992 |
|
RU2022751C1 |
| ШАРНИР ПРОТЕЗА | 1992 |
|
RU2049444C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2007 |
|
RU2339925C1 |
| Устройство для контроля состояния подшипников качения | 1990 |
|
SU1723482A2 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2005 |
|
RU2311623C2 |
Изобретение относится к виброметрии и может быть применено для физического моделирования звеньев вибродвигателя. Цель изобретения повышение точности моделирования. Для достижения поставленной цели в устройство введены датчик ускорения, два интегратора, два усилителя и два блока деления. Разделение оценки инерционных, диссипативных и упругих характеристик привело к повышению точности моделирования. 1 ил.
УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПАРАМЕТРОВ ВИБРОДВИГАТЕЛЯ, содержащее ротор вибродвигателя, вибратор, два усилителя, первый блок деления, фазометр, блок оптимизации, генератор гармонического сигнала, блок обратной передаточной функции вибратора, блок регистрации и датчик силы, установленный между подвижной частью вибратора и ротором вибродвигателя и соединенный с входом первого усилителя и первым входом фазометра, выход которого соединен с входом блока оптимизации и первым входом блока регистрации, выход блока оптимизации соединен с управляющим входом генератора гармонического сигнала, выход которого подключен к второму входу блока регистрации и входу блока обратной передаточной функции вибратора, выход которого соединен с входом вибратора, выход первого усилителя подключен к входу делимого первого блока деления, вход делителя которого соединен с выходом второго усилителя, выход первого блока деления подключен к третьему входу блока регистрации, отличающееся тем, что в него введены датчик ускорения, два интегратора, два усилителя и два блока деления, причем датчик ускорения, установленный на подвижной части вибратора, соединен с входом третьего усилителя и входом первого интегратора, выход которого соединен с входом второго усилителя, вторым входом фазометра и входом второго интегратора, выход которого через четвертый усилитель подключен к входу делителя второго блока деления, выход первого усилителя подключен к входам делимого соответственно второго и третьего блоков деления, выход третьего усилителя соединен с входом делителя третьего блока деления, выходы второго и третьего блоков деления подключены соответственно к четвертому и пятому входам блока регистрации.
| Устройство для моделирования вибродвигателя | 1980 |
|
SU894742A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
