Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока при регулировании частоты вращения и положения нагрузки при высоких требованиях к точности и качеству регулирования.
Цель изобретения - повышение динамической точности при стохастическом воздействии внешних возмущений.
На фиг. 1-5 представлены функциональная схема частотно-управляемого электропривода; .структурные схемы адаптивных задающих устройств положения и частоты вращения; структурная схема корректирующего устройства; схема ограничителя напряжения и схема релейных элементов с управляемым уровнем ограничения соответственно.
.Частотно-управляемый электропривод содержит электродвигатель переменного тока 1 с установленным на его валу датчиком частоты вращения 2 и датчик положения 3, последовательно включенные регулятор выходной координаты 4. ограничитель напряжения 5 с входом управления, функциональный блок 6 задания амплитуды и фазы токов, релейный регулятор фазных токов 7 и усилитель мощности 8, выходы
XI
ю
о со
00
которого через датчик фазных токов 9 подключены к обмоткам электродвигателя переменного тока 1, блок опорных гармонических сигналов 10, выход которого соединен с вторым входом функционального блока 6, Выход датчика фазных токов 9 подключен к другому входу релейного регулятора фазных токов 7.
В электропривод дополнительно введены блок вычисления ускорения и рывка 11, адаптивный блок задания положения 12, адаптивный блок задания частоты вращения 13, трехвходовый сумматор 14, источник опорного напряжения 15.
Адаптивный блок задания частоты вращения 13 (см.фиг.2) снабжен тремя двухвходовыми сумматорами 16-18, дифференциатором 19, узлом коррекции 20, функциональным преобразователем 21, блоком деления 22, последовательно включенными первым четырехвходовым и вторым трехвходовым релейными элементами 23, 24 с управляемым уровнем ограничения и интеграторами 25, 26. Первый вход адаптивного блока задания частоты вращения 13 образован первым входом первого релейного элемента 23 с управляемым уровнем ограничения, второй и третий входы которого подключены к выходу блока деления 22 и к выходу второго интегратора 26, объединенного с первым входом первого сумматора 16. Второй вход второго релейного элемента 24 объединён с управляемым уровнем ограничения, вход функционального преобразователя 21, первый вход второго сумматора 17 и вход дифференциатора 19 объединены и подключены к выходу первого интегратора 25. Выход дифференциатора 19 подключен к первому входу третьего сумматора 1.8. Выходы второго 17 и третьего 18 сумматоров соединены с входами узла коррекции 20, первый выход которого подключен к четвертому входу первого релейного элемента 23 с управляемым уровнем ограничения и к входу делителя блока Деления 22, а второй выход - к третьему входу второго релейного элемента 24 с управляемым уровнем ограничения. Выходы интеграторов 26, 25. первый выход узла 20 и выходы сумматоров 16.-18 образуют первый, второй, третий, четвертый, пятый и шестой выходы адаптивного блока задания частоты вращения 13, второй, третий и четвертый входы которого образованы вторыми входами сумматоров 16-18. Вход делимого блока деления соединен с выходом функционального преобразователя 21.
Адаптивный блок задания положения 12 (см.фиг.2) содержит четырехвходовый релейный элемент 27, масштабный усилитель 28, интегратор 29, двухвходовый сумматор 30, функциональный преобразователь 31 и блок деления 32. Первый вход релейного
элемента 27 образует первый вход задания адаптивного блока задания положения 12. Второй, третий и четвертый входы релейного элемента 27 подключены соответственно к выходам блока деления 32, функциональ0 ного преобразователя 31 и интегратора 29. Выход масштабного усилителя 28 подключен ко входу интегратора 29, соединенного выходом с первым входом сумматора 30. Второй третий, четвертый и пятый входы
5 адаптивного блока задания положения 12 образованы вторым входом сумматора 30 входами делимого и делителя блока деления
32и объединенными входами масштабного усилителя 28 и функционального преобра0 зователя 31. Выходы релейного элемента 27 и сумматора 30 образуют первый и второй выходы адаптивного блока задания положения 12, подключенные соответственно к первым входам адаптивного блока задания
5 частоты вращения 13 и регулятора выходной координаты 4. Выход датчика положения 3 ротора подключен ко второму входу адаптивного блока задания положения 12, третий - пятый входы которого соединены
0 соответственно с первым, вторым и третьим выходами адаптивного блока задания частоты вращения 13. Выход датчика частоты вращения 2 подключен к входу блока вычисления ускорения и рывка 11 и ко второму
5 входу адаптивного блока задания частоты вращения 13, третий и четвертый входы которого подключены к соответствующим выходам блока вычисления ускорения и рывка 11. Четвертый, пятый и шестой выхо0 ды адаптивного блока задания частоты вращения 13 подключены соответственно ко второму,третьему и четвертому входам регулятора выходной координаты 4. Пятый и шестой выходы адаптивного блока задания
5 частоты вращения 13 подключены кроме того к первым двум входам введенного сумматора 14, третий вход которого подключен к источнику опорного напряжения 15, а выход указанного сумматора подключен к
0 входу управления ограничителя напряжения 5.
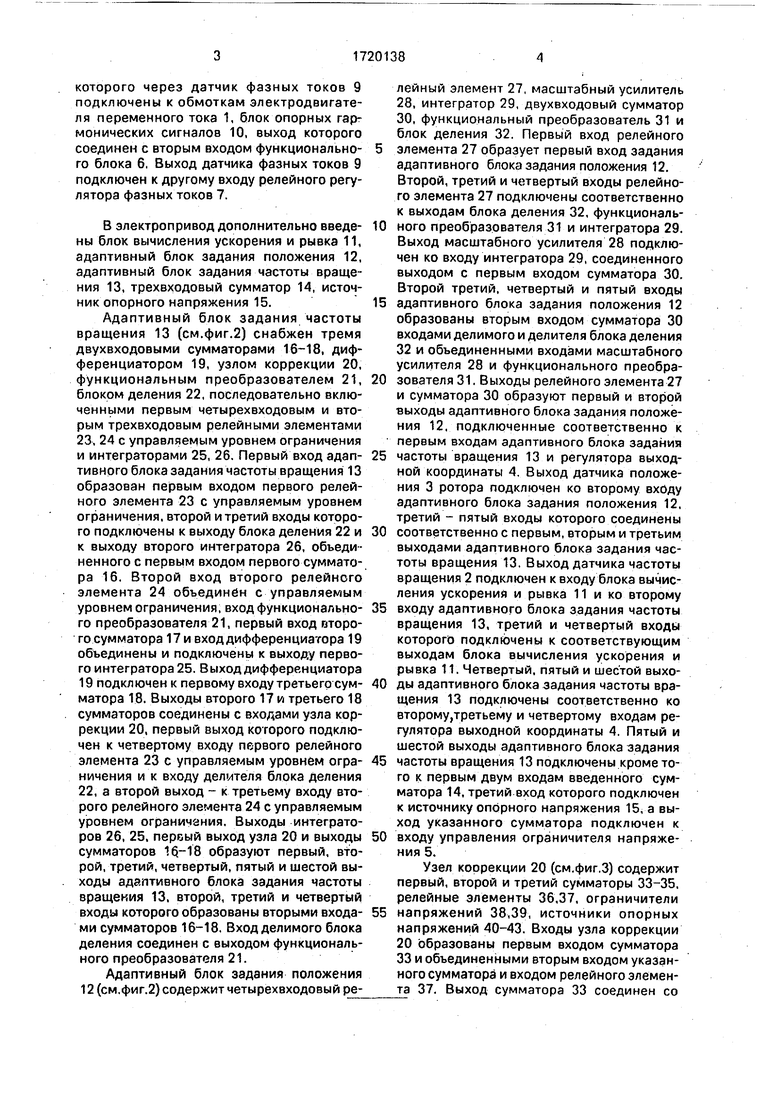
Узел коррекции 20 (см.фиг.З) содержит первый, второй и третий сумматоры 33-35. релейные элементы 36,37, ограничители
5 напряжений 38,39, источники опорных напряжений 40-43. Входы узла коррекции 20 образованы первым входом сумматора
33и объединенными вторым входом указанного сумматора и входом релейного элемента 37. Выход сумматора 33 соединен со
входом релейного элемента 36. Выходы релейных элементов 36, 37 подключены к основным входам ограничителей напряжения 38, 39, выходы которых соединены с первыми входами сумматоров 34, 35. Вторые входы сумматоров 34, 35 и входы управления .ограничением ограничителей 38, 39 соединены с выходами источников опорных напряжений 40-43. Выходы узла коррекции 20 образованы выходами сумматоров 34, 35.
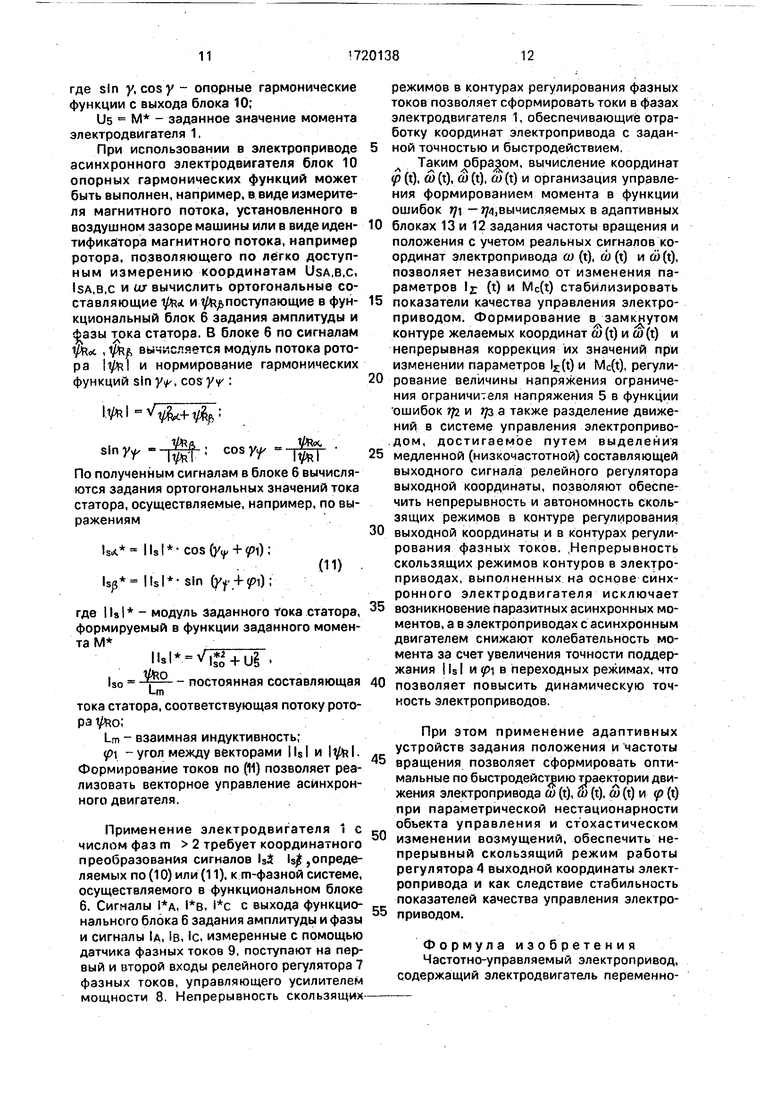
Ограничители напряжений 5, 38, 39 (см.фиг.4) выполнены по идентичным друг другу схемам, в которых симметрирующий элемент 44, пиковый детектор 45, повторитель 46 и блок умножения 47 включены последовательно. Вход симметрирующего элемента 44 соединен с основным входом ограничителя напряжения 5 (38,39). Второй вход и выход блока умножения 47 подключены соответственно ко входу управления ограничением и выходу ограничителя напряжения 5 (38, 39).
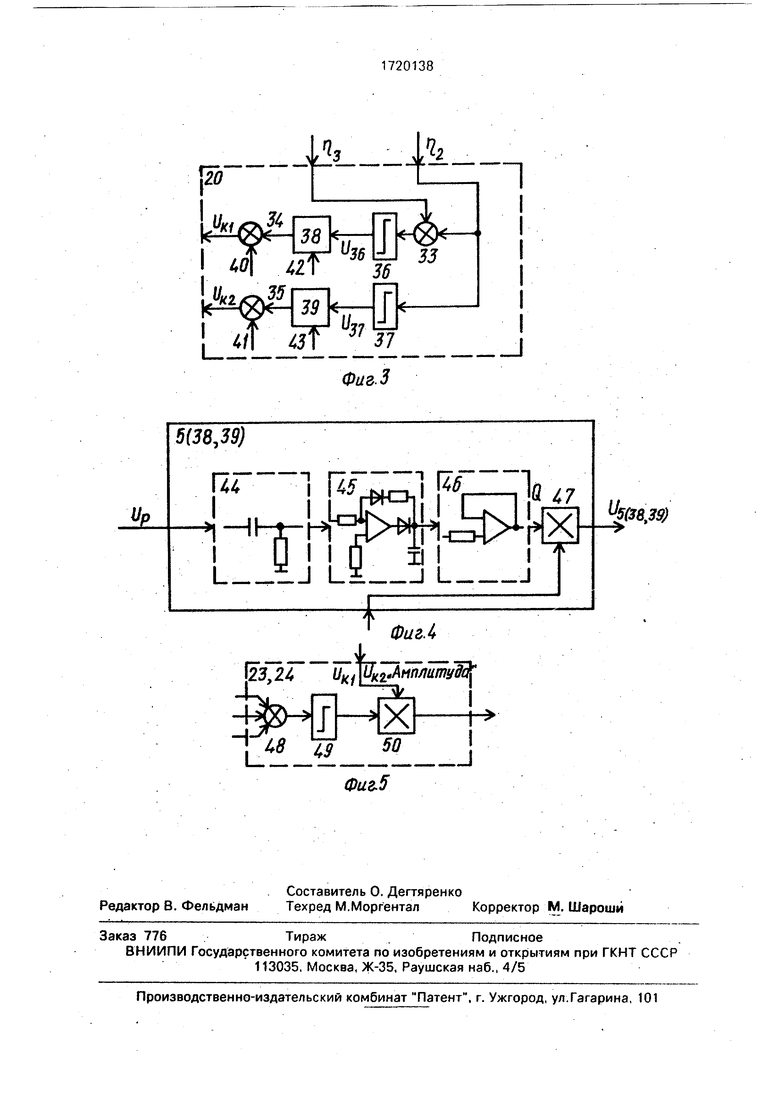
Релейные элементы 23. 24. с регулируемым уровнем ограничения (см.фиг.5) содержат сумматор 48. входы которого являются входами релейных элементов 23 (24), а выход через компаратор 49 подключен к первому входу блока умножения 50. Второй вход блока умножения 50 является входом Амплитуда1, а выход блока умножения 50 является выходом релейного элемента 23(24) с регулируемым уровнем ограничения.
Частотно-управляемый электропривод обеспечивает управление выходной координатой электропривода - положением нагрузки, при исключении из его состава адаптивного блока 12 задания положения, датчика .положения 3 ротора и соответствующих связей - частотой вращения электродвигателя переменного тока 1.
Частотно-управляемый электропривод работает следующим образом.
При управлении частотой вращения электродвигателя 1 на входы адаптивного блока задания частоты вращения 13 поступает сигнал задания ft)(t) и сигналы ft(t), ft) (t) и oi(t) с выходов датчика частоты вращения 2 и блока вычисления ускорения и рывка 11. Формирование оптимальных по быстродействию траекторий ш (t), ы (t) и w (т.) движения электропривода осуществляется в замкнутой подсистеме, образованной элементами адаптивного блока задания частоты вращения 13. Плоскости переключения компараторов 49 релейных элементов 23 и 24 заданы в следующем виде:
523 ft))-cift signw 0;(1)
524 U23-o 0,(2)
где со, (О- сигналы заданной и измеренной датчишм 2 частот вращения ;
о,со-сигналы, пропорциональные частоте вращения и ускорению на выходах интеграторов 26 и 25;
UK1 - коэффициент, устанавливаемый с помощью блока деления 22 в зависимости от значения UKI;
UKI - напряжение на первом выходе узла коррекции 20:
от sign ft) - сигнал, формируемый на
выходе функционального преобразователя 21 по сигналу ш на его входе. Напряжение на выходах релейных элементов 23,24 с управляемым уровнем ограничения определяются равенствами
U23 UicrlMg sign 823;
U24 U 2 U49 Sign $24.
(3)
(4)
где 11к2 - напряжение на втором выходе узла коррекции 20;
U49 постоянная амплитуда напряжения на выходе компаратора 49.
Интегрирование напряжений Ui и Die интеграторами 25 и 26 позволяет получить на их выходах напряжения U25 ft), 1)26 м. Дифференцированием напряжения U25 блоком 19 получим на его выходе напряжение,
пропорциональное а).
При отклонении значений суммарного момента инерции электропривода IE (t) и момента статического сопротивления Mc(t) от расчетных формирование оптимальных
по быстродействию траекторий движения электропривода ft(t),ft)(c), w(t) достигается с помощью управления выходной амплитудой напряжений релейных элементов 23,24, осуществляемого сигналами и
Ук2 с выхода узла, коррекции 20. Кроме того, осуществляется настройка коэффициента обратной связи Ci в (1), реализуемая элементом деления 22 по сигналу UK1.
Для формирования корректирующих
сигналов UKI и UK2 в узле коррекции с 20 сумматорами 17 и 18 вычисляются ошибки ф игр:
л,
55
1J2 ft) (t) - ft) (t) ; /3 ft) (t) - (i) (t)
(5)
Значения ft)(t) и ui(t) вычисляются в блоке 11 по значению ft) (t), измеренному датчиком частоты вращения 2. Блок вычисления ускорения и рывка 11 выполнен, например, согласно структурной схемы многократного дифференцирования,состоящей из регулятора, релейного элемента и последовательно соединенных интегрирующих звеньев. Выходные напряжения релейных элементов 36 и 37 узла коррекции 20 определяются выражениями
Узе UpsSlgn 5зб;
U37 UpaSign $37,
(6) (7)
где 5зе Tft+Cz тр 0 и 5з7 ф 0 - плоскость и линия переключения релейных элементов 36,37;
ирэ - амплитуда выходных напряжений указанных релейных элементов;
С2 - постоянный коэффициент.
Сигналы Use, Us поступают на основные входы ограничителей 38 и 39, выделяющих медленную (низкочастотную) составляющую указанных сигналов и осуществляющих масштабирование этих сигналов в соответствии с уровнем напряжений, определяемых источниками 42 и 43 опорных напряжений. Выходные напряжения и Utc2 узла коррекции 20 вычисляются при помощи сумматоров 34 и 35 по выражениям
UK - U40 + Use; UK2 U41 + изэ. (8)
где 1)40, LMi - выходные сигналы источников 40 и 41 опорных напряжений;
Use, U39 - выходные сигналы ограничителей 38 и 39. Величины напряжений источников 40 и 41 выбираются исходя из максимальных значений ш для расчетных значений lx(t) и Mc(t). При равенстве реальных и расчетных значений lt (т.) и Mc(t) ошибки tfi - rjz 0, выходные напряжения ограничителей 38 и 39 равны нулю, а величина выходных сигналов узпа коррекции 20 определяется равенствами
U«1 иад; UK2 U41.
(8)
Отклонения ъ (t) и Mc(t) от расчетных приводят к возникновению ошибок тр О, ifi & О, изменению сигналов и Ык2 согласно (8) и сигнальной перенастройке амплитуд U23 и U24, компенсирующих возникшие отклонения.
Формирование плоскостей переключения S23 и $24 релейных элементов 23 и 24 по (1) и (2) и корректирование в процессе согласования желаемых координат й (t) и ш (t) с фактическими координатами о) (t) и y(t) значений амплитуды напряжений U23 и U24 в (3)
и (4) согласно (6) и (7) и координаты обратной связи Ci в (1), выполняемое элементом деления 22 по сигналу UK1, позволяет в замкнутой подсистеме адаптивного блока 13 задания частоты вращения получить оптимальные по быстродействию траектории движения электропривода o)(t), o(t) и co(t) при отклонениях значений 1 (t) и Mc(t) от расчетных.
Выходные сигналы,з и 7/1 u(t)-uJ(t) поступают на входы регулятора 4 выходной координаты электропривода, формирующего управляющее напряжение Up на своем выходе по выражению:
UP U4SlgnS4,(9)
где S4 /1 + Сз т/2 + С4 грi 0 - уравнение поверхности переключения регулятора 4
выходной координаты X;
U4 - амплитуда выходного сигнала рёгу- лятора 4;
Сз, С4 - постоянные коэффициенты. Рассмотрим особенности формирования управляющего напряжения Up при управлении электроприводом в режиме позиционирования. Адаптивный блок 12 задания положения по входному сигналу задания сигналу р - с датчика 3 положения
ротора и по сигналам UK1. ( шс выходов адаптивного блока 13 задания частоты вращения формирует сигнал задания ш (t) соответствующий оптимальному с точки зрения точности и быстродействия закону
изменения скорости с учетом реальных значений lЈ(t) и Mc(t) и заданного значения р. При этом значением получают на выходе релейного элемента 27 в соответствии с выражением
U27 UMsign S27,(10)
где827 у -p-C5ft zsigno)(10)- уравнение поверхности переключения ре- лейного элемента 27;
UM - амплитуда напряжения релейного элемента 27;
(р- сигнал с выхода интегратора 29;
С - постоянный коэффициент;
assign ш - сигнал, формируемый функ
циональным преобразователем 31 по сигналу ш на его входе;
Се 1 /UKI - коэффициент, вычисляемый вторым элементом деления 32 в зависимо- сти от напряжения UKL
Напряжение U27 поступает на вход задания адаптивного блока 13 задания частоты вращения, которое вырабатывает оптимальные по быстродействию траектории o(t), w(t) и
u)(t), движения электропривода, По координате u)(t) электропривода интегратором 29 вычисляется значение
y(t) /U28dt C7/e3dt,
где U28 напряжение на выходе масштабного усилителя 28;
С - постоянный коэффициент, учитывающий передаточное число редуктора.
Формирование выходного напряжения U26 ш (t) по (9) с адаптацией коэффициента Се в поверхности переключения (101), совместно с адаптивным блоком задания частоты вращения 13 позволяет с учетом заданного значения # и реальных значений параметров ъ (т) и Mc(t) организовать замкнутую систему вычисления оптимальных fраекто- рий$(т), u)(t),G(t) и«5(т) движения электропривода,
Управляющее напряжение на выходе регулятора 4, вычисляемое согласно (9), для случая управления электроприводом в режиме позиционирования или слежения определяется поверхностью переключения SA, задаваемой выражением
S4 Щ + Сз ф + С4 + Се rjn 0 ,
где Св - постоянный коэффициент;
4 р (t) - ф (t) - сигнал на выходе сумматора 30. Напряжение Up с выхода регулятора 4 выходной координаты поступает на вход ограничителя напряжения 5.
Ограничители напряжения 5, 38, 39 предназначены для выделения среднего за период переключения значения управляющего сигнала Кэкв и масштабирования амплитуды полученного напряжения Узка в соответствии с напряжениями с выходов сумматора 14 и источников 42, 43 опор- ных напряжений. Напряжение Уэкв выделяется из сигналов с выходов регулятора 4 выходной координаты и релейных элементов 36, 37, представляющих собой чередующиеся с частотой скользящего режима и изменяющейся относительной длительностью уровни положительного отрицательного 1Г напряжений, причем IU 1 ILTI.В ограничителях напряжений 5,38,39 входной сигнал без искажения формы симметрируется относительно нуля симметрирующим элементом 44, выполненным в виде RC- целочки. Площади положительного и отрицательного импульсов напряжения выравниваются. При этом амплитуда, например, отрицательного импульса, пропорциональная скважности Q входного
сигнала, выделяется пиковым детектором 45 и через повторитель 46 поступает на вход блока умножения 47, осуществляющего масштабирование полученного на выходе повторителя 46 сигнала в соответствии с величиной напряжения, поступающего на вход управления ограничением. Выходное напряжение Уэкв ограничителя напряжения 5 является линейной функцией напряжения Ut4, поступающего на вход управления ограничением с выхода сумматора 14, и сигнала U4e Q4 с выхода повторителя 46, определяемого скважностью импульсов Q4 на выходе регулятора 4.
иэкв Us s Ш - 2Ui4(Q 14-0,5),
где Ui4 - напряжение на выходе сумматора 14
Ui4 Uis + C9 2 +
Uis - выходное напряжение источника опорного напряжения 15;
Сэ.Сго- постоянные коэффициенты.
Для ограничителей напряжений 38 и 39 аналогично имеем, что
Узе 2U42(Q36-0,5); U39 2U43(Q37-0.5). .
где Озе и Оз - переменная относительная длительность (скважность) напряжений Озб и Уз, определяемых в соответствии с(6)и(7);
U42,U43 - сигналы на выходах опорных
источников 42, 43, выбранных из условия обеспечения минимального времени и требуемого качества схождения модельных (ГУ), cb, щ и реальных (а), ш, ш) переменных. Напряжение Us поступает на первый вход
функционального блока 6 задания амплитуды и фазы токов, связанного вторым входом с выходом блока 10 опорных гармонических сигналов.
Блоки б и 10 в зависимости от разновидности применяемого электродвигателя переменного тока будут иметь функциональные особенности.
При использовании в электроприводе синхронного электродвигателя с постоянными магнитами блок 10 опорных гармонических функций может быть выполнен, например, в виде датчика положения ротора, связанного механически с валом электродвигателя. В функциональном блоке 6
задания амплитуды и фазы токов статора формируются задания ортогональных составляющих заданных значений токов статора:
-U5Slny; Uscos} , (10)
где sin у, cosy- опорные гармонические функции с выхода блока 10;
Us М - заданное значение момента электродвигателя 1,
При использовании в электроприводе асинхронного электродвигателя блок 10 опорных гармонических функций может быть выполнен, например, в виде измерителя магнитного потока, установленного в воздушном зазоре машины или в виде идентификатора магнитного потока, например ротора, позволяющего по легко доступным измерению координатам USA,в,с, ISA.B.C и иг вычислить ортогональные составляющие УКЛ. n fybпоступающие в функциональный блок 6 задания амплитуды и Фазы тока статора. В блоке 6 по сигналам Vfc , faf, вычисляется модуль потока ротора ivtel и нормирование гармонических функций sin , cos у v :
. .ft. .
slnyy, cosyf --щтПо полученным сигналам в блоке б вычисляются задания ортогональных значений тока статора, осуществляемые, например, по выражениям
cos (уу, + ); Up -li«I -sin OY + JPI); (11)
где I Is I - модуль заданного тока статора, формируемый в функции заданного момента .
H.I-.-V|g + uS ,
Uo - постоянная составляющая
Lm
тока статора, соответствующая потоку ротора t/fco;
Lm - взаимная индуктивность;
р - угол между векторами |lsl и $. Формирование токов по (11) позволяет реализовать векторное управление асинхронного двигателя.
Применение электродвигателя 1 с числом фаз m 2 требует координатного преобразования сигналов Is, is,определяемых по (10) или (11). к m-фазной системе, осуществляемого в функциональном блоке 6. Сигналы , в. с выхода функционального блока 6 задания амплитуды и фазы и сигналы IA, IB, Ic, измеренные с помощью датчика фазных токов 9, поступают на первый и второй входы релейного регулятора 7 фазных токов, управляющего усилителем мощности 8. Непрерывность скользящихрежимов в контурах регулирования фазных токов позволяет сформировать токи в фазах электродвигателя 1, обеспечивающие отработку координат электропривода с заданной точностью и быстродействием.
Таким , вычисление координат р (t), 5(t), d) (t), ft(t) и организация управления формированием момента в функции ошибок r) -rj4,вычисляемых в адаптивных
блоках 13 и 12 задания частоты вращения и положения с учетом реальных сигналов координат электропривода о (t), ш (t) и oi (t), позволяет независимо от изменения параметров lЈ (t) и Mc(t) стабилизировать
показатели качества управления электроприводом. Формирование в замкнутом контуре желаемых координат о) (т) и w(i) и непрерывная коррекция их значений при изменении параметров lЈ(t) и Mc(t), регулирование величины напряжения ограничения ограничителя напряжения 5 в функции ошибок rfi и з а также разделение движений в системе управления электроприво- .дом, достигаемое путем выделения
медленной (низкочастотной) составляющей выходного сигнала релейного регулятора выходной координаты, позволяют обеспечить непрерывность и автономность скользящих режимов в контуре регулирования
выходной координаты и в контурах регулирования фазных токов. Непрерывность скользящих режимов контуров в электроприводах, выполненных на основе синхронного электродвигателя исключает
возникновение паразитных асинхронных моментов, а в электроприводах с асинхронным двигателем снижают колебательность момента за счет увеличения точности поддержания Usl и pi в переходных режимах, что
позволяет повысить динамическую точность электроприводов.
При этом применение адаптивных устройств задания положения и частоты
вращения позволяет сформировать оптимальные по быстродействию траектории движения электропривода о (t), ca (t), ш (t) и р (t) при параметрической нестационарности объекта управления и стохастическом
изменении возмущений, обеспечить непрерывный скользящий режим работы регулятора 4 выходной координаты электропривода и как следствие стабильность показателей качества управления электро5
приводом.
Формула изобретения Частотно-управляемый электропривод, содержащий электродвигатель переменного тока с установленным на его валу датчиком частоты вращения, датчик положения, последовательно включенные регулятор выходной координаты, ограничитель напряжения с входом управления, функциональный блок задания амплитуды и фазы токов, выполненный со вторым входом, релейный регулятор фазных токов, выполненный со вторым входом, и усилитель мощности, выходы которого через датчик фазных токов подключены к обмоткам электродвигателя переменного тока, блок опорных гармонических сигналов, выход которого соединен с вторым входом функционального блока задания амплитуд и фазы токов, при этом выход датчика фазных токов подключен ко второму входу релейного регулятора фазных токов, отличающийся тем, что, с целью повышения динамической точности при стохастическом воздействии внешних возмущений, в него введены блок вычисления ускорения и рывка, адаптивный блок задания положения, адаптивный блок задания частоты вращения, трехеходовый сумматор и источник опорного напряжения, причем адаптивный блок задания частоты вращения выполнен стремя двухвходовыми сумматорами, дифференциатором, узлом коррекции уровней ограничений релейных элементов, функциональном преобразователем, реализующим произведение квадрата функции на ее знак, блоком деления и последовательно включенными первым че- тырехвходовым, вторым трехвходовым релейными элементами с управляемыми уровнями ограничения и двумя интеграторами, первый вход первого упомянутого релейного элемента образует первый вход адаптивного блока задания частоты вращения, второй вход подключен к выходу блока деления, третий вход объединен с первым входом первого сумматора и подключен к выходу второго интегратора, второй вход второго упомянутого релейного элемента объединен с входом упомянутого функционального преобразователя, первым входом второго сумматора, входом дифференциатора и подключен к выходу первого интегратора, выход дифференциатора подключен к первому входу третьего сумматора, выход которого и выход второго сумматора подключены к соответствующим входам упомянутого узла коррекции, первый выход которого подключен к четвертому входу первого упомянутого релейного элемента и к входу делителя блока деления, второй выход узла коррекции подключен к третьему входу второго упомянутого релейного элемента, а вход делимого блока деления соединен с выходом упомянутого Функционального преобразователя, выходы второго и первого интеграторов, первый выход упомянутого узла коррекции и выходы первого, второго и третьего сумматоров 5 образуют соответственно первый, второй, третий, четвертый, пятый и шестой выходы адаптивного блока задания частоты вращения, второй, третий и четвертый входы которого образованы соответственно вторыми
10 входами первого, второго и третьего сумматоров, адаптивный блок задания положения выполнен с четырехвходовым релейным элементом, масштабным усилителем, интегратором, двухвходовым сумматором,
5 функциональным преобразователем, реализующим произведение квадрата функции на ее знак, и блоком деления, первый вход упомянутого релейного элемента образует вход задания адаптивного блока задания
0 положения, второй, третий и четвертый входы релейного элемента подключены в адаптивном блоке задания положения соответственно к выходам блока деления, функционального преобразователя и интег5 ратора, выход масштабного усилителя подключен к входу интегратора, соединенного выходом с первым входом сумматора, второй вход которого, входы делимого и делителя блока деления и объединенные между
0 собой входы масштабного усилителя и упомянутого функционального преобразователя образуют соответственно второй, третий, четвертый и пятый входы адаптивного блока задания положения, первый и второй выхо5 ды которого, образованные.соответственно выходами релейного элемента и сумматора, подключены соответственно к первому входу адаптивного блока задания частоты вращения и к первому входу регулятора вы0 ходной координаты, выход датчика положения подключен ко второму входу адаптивного блока задания положения, третий, четвертый и пятый входы которого соединены соответственно с первым, вторым и
5 третьим выходами адаптивного блока задания частоты вращения, выход датчика частоты вращения подключен к входу блока вычисления ускорения и рывка и ко второму входу адаптивного блока задания частоты
0 вращения, третий и четвертый входы которого подключены к соответствующим выходам блока вычисления ускорения и рывка, четвертый, пятый и шестой-выходы адаптивного блока задания частоты вращения под5 ключены соответственно ко второму, третьему и четвертому входам регулятора выходной координаты, пятый и шестой выходы адаптивного блока задания частоты вращения подключены к первым двум входам введенного трехвходового сумматора,
третий вход которого подключен к источни- го сумматора подключен к входу управления ку опорного напряжения, а выход указанно- ограничителя напряжения.



| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Электропривод | 1983 |
|
SU1170575A1 |
| Устройство для регулирования асинхронного двигателя | 1983 |
|
SU1202006A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |

Изобретение относится к электротехнике и может быть использовано в электроприводах переменного тока при регулировании частоты, вращения и положения нагрузки при высоких требованиях к точности и качеству регулирования. Целью изобретения является повышение динамической точности при стохастическом воздействии внешних возмущений. Указанная цель достигается введением блока вычисления измерения и равна адаптивного устройства задания положения с соответствующим выполнением, адаптичного устройства задания частоты вращения с соответствующим выполнением, сумматора и источника опорного напряжения. При этом формируются оптимальные по быстродействию траектории движения электропривода при параметрической нестационарности объекта управления и стохастическом изменении возмущений, благодаря чему обеспечивается непрерывный скользящий режим работы регулятора выходной координаты электропривода и как следствие стабильность показателей качества управления электроприводом. 5 ил.
риг.1
фиг. 2
| Слежановский О.В., Дацковский Л.Х | |||
| и др | |||
| Схемы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями | |||
| М.; Энергоатомиздат, 1983 | |||
| с | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Электропривод | 1983 |
|
SU1112520A1 |
