(S) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ВИБРОДВИГАТЕЛЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПАРАМЕТРОВ ВИБРОДВИГАТЕЛЯ | 1992 |
|
RU2045094C1 |
| Устройство для управления вибродвигателем | 1978 |
|
SU764016A1 |
| Устройство для питания пьезоэлектрического вибродвигателя | 1978 |
|
SU705568A1 |
| Устройство для питания пьезоэлектрического вибродвигателя | 1978 |
|
SU716627A1 |
| Вибродвигатель | 1978 |
|
SU794686A1 |
| Способ определения собственных форм и частот колебаний испытуемого объекта и устройство для его осуществления | 1987 |
|
SU1619087A1 |
| Устройство для питания пьезоэлектрического вибродвигателя | 1977 |
|
SU660730A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1095042A2 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| Устройство для измерения механического импеданса объектов,имеющих собственную подвижность | 1979 |
|
SU894371A1 |
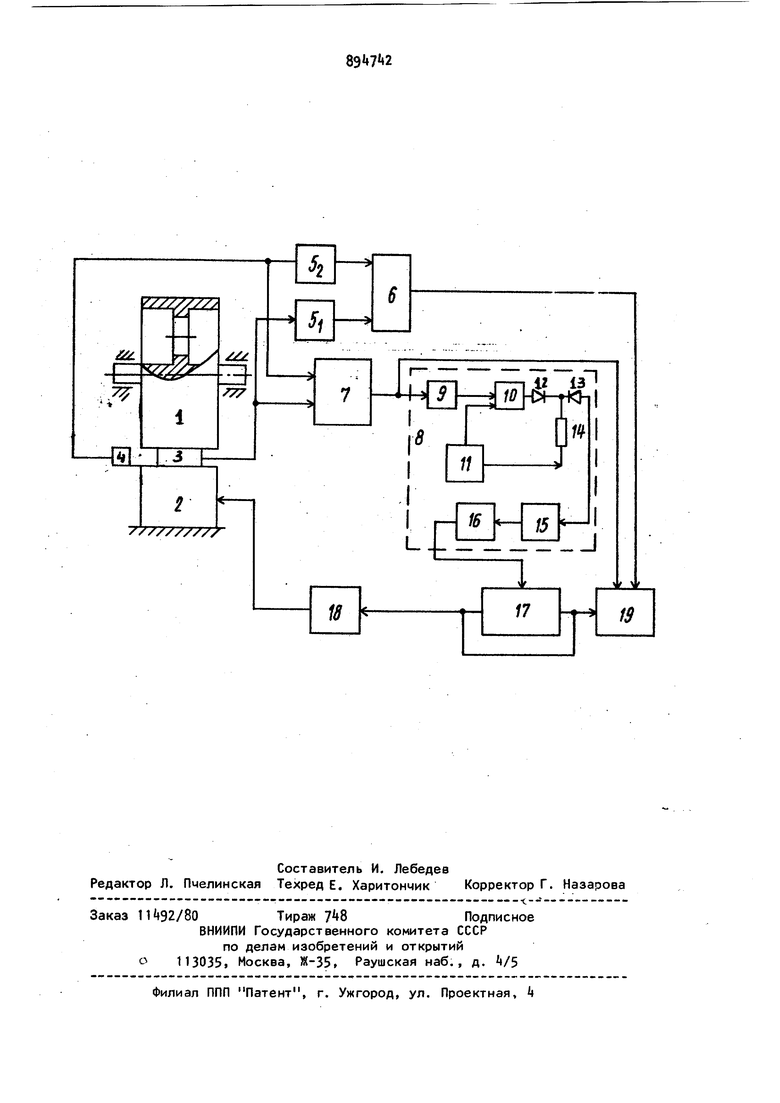
Изобретение относится к полунатур ному моделированию и может быть применено для электрического моделирования звеньев вибродаигателей. Известен вибродвигатель, который содержит ротор и пьезокерамический вибратор, упруго закрепленный в корпусе и прижатый к ротору СП. Наиболее близким к предлагаемому является устройство, содержащее исследуемый объект, установленный на возбудителе колебаний, датчики параметров, установленные на исследуемом объекте и подключенные к соответству щим входам блока моделирования динамической системы и блока оптимизации возбудитель колебаний в виде взаимно перпендикулярно установленных пьезоэлектрических преобразователей 2. Недостаток известных устройств отсутствие возможности синтеза ведущего пьезокерамического движителя. Цель изобретения - осуществление синтеза ведущего пьезокерамического движителя. Для достижения поставленной цели в устройство для моделирования вибродвигателя, содержащее ротор вибродвигателя, вибратор, датчик скорости, блок оптимизации, генератор гармонического сигнала и блок обратной передаточной функции вибратора, дополнительно введены датчик силы, два аналоговых блока памяти, блок деления, фазометр и блок регистрации, причем дат1«1К скорости, установленный на подвижной части вибратора, соединен со входом первого аналогового блока памяти и первым входом фазометра, датчик силы, установленный между подвижной частью вибратора и ротором вибродвигателя, соединен со входом второго аналогового блока памяти и вторым входом фазометра, выход которого соединен со входом блока оптимизации и первым входом блока реIгистрации, .выхода аналоговых блоков памяти соответственно соединены со входами блоха деления, выход которого соединен со вторым входом блока регистрации, третий вход которого подклю чен к выходу генератора гэдмюиического сигнала, соединенному через блок обратной передаточной функции вибратора со входом вибратора, а выход блока оптимизации соединен с управляющим входом генератора гармонического сигнала. Блок оптимизации содержит элемент дифференцирования, сумматор, задатчик постоянных напряжений, два диода, согласующий резистор, триггер и интегратор, причем вход элемента дифференцирования является входом блока оптимизации, а выход элемента дифференцирования соединен с первым вхо дом сумматора, второй вход которого подключен к первому выходу задатчика постоянных напряжений, второй выход которого через согласуюи й резистор соединен с общим катодом двух диодов, анод первого диода подключен к выходу сумматора, а анод второго диода через триггер соединен со входом интегратора, выход которого явля ется выходом блока оптимизации. На чертеже показана схема предлагаемого устройства. Устройство содержит ротор 1, вибратор 2, датчик 3 силы, расположенный между ротором 1 и вибратором 2, датчик k скорости, расположенный на подвижной части вибратора, аналоговы блоки 5 и 5п памяти, через которые k соединены со выходы датчиков 3 и входами делимого и делителя блока 6 деления, фазометр 7 входы которого соединены со входами датчиков 3 и 4 непосредственно, блок 8 оптимизации, включающий в себя элемент 9 дифферен цирования, сумматор 10, задатчик 11 постоянных напряжений, два встречнопротивоположно соединенных диода 12 и 13, согласующий резистор Н, триггер 15 и интегратор 16, генератор га монического сигнала 17 блок 18 обратной передаточной функции вибратор через который выход генератора 17 со динен со входом вибратора 2 и блок . 19 регистрации, отдельные входы которого соединены с выходами блоков 6 7 и 17. о Предлагаемое устройство работает следующим образом. 24 Датчик 3 силы выдает сигнал, пропорциональный силе F взаимодействия меаду вибратором 2 и ротором 1, дат чин скорости зыдает сигнал, пропор™ циональный .скорости X подвижной час ти вибратора 2. Сигналы с выходов датчиков 3 и 4 поступают в аналоговые блоки 5, и 5п памяти, на выходе которых получаются сигналы, пропорциональные амплитудным значениям упомянутых силы и скорости соответственно. Сигнал с выхода блока 5i поступает на вход делимого блока b деления, а с выхода блока 5) - на вход делителя блока 6, на выходе которого получается сигнал, пропорциональный соотношению амплитудных значений F и X, т.е. , кЬторый равен модулю механического импеданса ротора 1. Сигналы с выходов датчиков 3 и поступают также на входы фазометра 7, на выходе которого образуется напряжение, гфопорциональное разности фаз между силой F и скоростью X. Этот сигнал поступает на вход блока 9 дифференцирования блока 8 оптимиза1 ии. Сигнал с выхода блока 9 который является положительным при увеличении разности фаз и отрицательным при ее уменьшении, Поступает на вход сумматора 10, на второй вход которого поступает напряжение отрицательного знака с выхода задатчика 11 постояньмх напряжений. Сигнал на выходе сумматора 10, таким образом, положителен, а отрицательным он становится только тогда, когда положительное напряжение на выходе блока 9 превышает отрицательное напряжение на выходе.блока 11. Сигнал с.выхода сумматора 10 поступает на вход двух противоположно-встречно соединенных диодов 12 и 13 к общей точке минусовых полюсов которых подключено отрицательное напряжение со второго выхода блока 11. Когда нз выходе сумматора 10 присутствует положительное напряжение, диод 12 открьгг и на общей точке - также положительное напряжение. Диод 13 при этом закрыт. Когда напряжение на выходе сумматора ТО становится отрицательным, диод 12 закрывается-, и отрицательное напряжение со втсюого зыхода блока постоянного напряжения через резистор 14 и диод 13 скачкообразно поступает на счетный вход триггера 15. Триггер меняет состояние и при этом меняется знак напряжения на его выходе. Выходное напряжение с выхода триггера
8 поступает на вход интегратора liS, на выходе которого получается возрастающее или убывающее напряжение в зависимости от того, отрицательное или положительное напряжение находит ся на выходе триггера 15. Возрастающее или убывающее напряжение с выхода интегратора поступает на управляющий вход генератора 17 на выходе которого образуется гармонический сигнал с увеличивающейся или уменьшающейся частотой и постоянной амплитудой. Сигнал с выхода генератора 17 поступает через блок 18 обратной передаточной функции вибратора на вход вибратора 2. Блок 18 обратной передаточной функции вибратора выполняется в зависимости от динамической структуры и параметров вибратора 2. Если, например, применяется электродинамический вибратор, динамика которого описывается дифференциальным уравнением второго порядка, то, чтобы вибратор передавал колебания генератора 17 заданного закона и амплитуды, блок 18 обратной передаточной функции вибратора должен быть выполнен в виде фильтра с характеристикой реализующей оператор, обратный колебательному .
При сложной кон()мгурации ротора 1 максимальный момент, передаваемый от двигателя пьезод гателя на ротор, передается, когда достигается максимум механического импеданса ротора 1.
(1)
f{-r-
М
X Так как механический импеданс рото)ра увеличивается при наибольшем удалении от собственных форм колебаний ротора, то он будет наибольшим при минимуме разности фаз между силой F и скоростью )(/ когда частота генератора 17 находится между двумя соседними формами колебаний. Если, например, при любом начальном состоянии интегратбра 16 и соответствующей частоте колебаний генератора 17 она не соответствует минимуму, и, например меньше, чем в точке минимума и триггер 15 находится в состоянии, когда на выходе присутствует отрицательное напряжение, то она вызывает нарастание положительного напряжения на выходе интегратора 16, тем самым увеличивает частоту генератора 17, разность фаз уменьшается, напряжение на выходе блока 7 уменьшается, а на выходе блока 9 становится отрицательным. Напряжение на выходе сумматора 10 - положительное, диод 13 закрыт. Триггер 15 находится в том же положении, а частота нарастает. Когда частота достигает точки минимума разности фаз и переходит его, напряжение на выходе фазометра 7 на|«1нает возрастать и, когда превышает отрицательное напряжение, поступающее с выхода блока 9 на выходе блока дифференцирования появляется отрицательное напряжение, диод 13 открывается, образуется скачок напряжения и триггер 15 меняет состояние. НапряжеSние на его выходе тоже меняет знак, напряжение на выходе интегратора 16 уменьшается и, тем самым, уменьшается и частота генератора 17. Разность фаз уменьшается, а на выходе блока 9 напряжение будет отрицательного знака до тех пор, пока частота, уменьшаясь, переходит точку минимума фаз и разность фаз увеличивается. При достижении на выходе блока 9 положительного напряжения выше отрицательного на первом выходе блока 11 триггер 15 меняет состояние, и процесс повторяется. Колебание вокруг точки минимума фаз уменьшается до незначительного, подбирая величину отрицательного напряжения на первом выходе блока 11.
Если при начальном положении триггер 15 находится в состоянии, когда напряжение положительное, то частота колебаний генератора уменьшается, а значит разность фаз увеличивается, напряжение при этом на выходе блока 9 Положительное, при достижении соответствующего уровня способствует изменению состояния триггера 15.и изменяет изменение частоты,приводящей к минимуму разности фаз.
Процесс поиска минимума разности фаз при установлении начального состояния за минимумом происходит аналоSгично. Так как пьезокерамический дви)китель в вибродвигателе должен работать в резонансе, т.е. с частотой по первой форме колебаний, и наибольшую эффективность он дает при максимуме
0 механического импеданса ротора, то найденная частота при минимуме разности фаз является той частотой, на которой должен работать движитель. А так как первая форма движителя опреSделяется по формуле
е f{,) (2) ТО величина частоты определяет длину пьезокерамического движителя.
Чтобы найти возможные параметры длины движителя, рассматривают области между различными формами колебаний ротора. Результаты фиксируются с помощью блока 19 регистрации, на входа которого .поступают сигналы с выходов блоков 6, 7 и 17 пропорциональные соответственно модулю механического импеданса, разности фаз и частоте генератора 17. По зарегистрированным параметрам в диапазонах между разными формами колебаний выбирается тот в точке минимума разности фаз, в котором механический импеданс имеет наибольшее значение. По частоте в этой точке минимума по формуле (2) подбирается параметр Е движителя.
Использование предлагаемого устройства позволяет осуществить синтез ведущего пьезокерамического движителя по максимуму импеданса и по фазовой характеристике ротора и, тем самым, на 20-30 повысить мощность вибродвигателя и на 2-3% КПД.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
