Изобретение относится к испытательному оборудованию, а именно к оборудованию для испытания на прочность многозвенных элементов механизации крыла самолета, рулевых и других отклоняемых поверхностей и, преимущественно предназначено для испытания закрылков самолета.
Известно устройство для испытания на прочность отклоняемых поверхностей летательного аппарата [1] содержащее установленный на основании гидроцилиндр, параллелограммный механизм, выходное звено которого соединено с рычажной системой, связанной с испытываемой поверхностью, при этом загрузочный гидроцилиндр через трос и барабан соединен с одним из звеньев параллелограммного механизма.
Это устройство не позволяет приблизить условия испытаний отклоняемых поверхностей, а именно закрылков, к эксплуатационным, так как оно не обеспечивает возможности изменения направления вектора аэродинамической нагрузки, соответствующего изменению положения закрылка при различных режимах полета.
Известно также устройство для испытаний закрылка летательного аппарата [2] содержащее шарнирно установленные на основании приводной гидроцилиндр и рычаг, один конец которого шарнирно соединен с приводным гидроцилиндром, а другой с загрузочным гидроцилиндром, соединенным с рычажной системой, связанной с испытываемым закрылком. Устройство содержит также датчик положения приводного рычага и программно-временное управляющее устройство. Гидроцилиндры, приводной и загрузочный, а также датчик положения приводного рычага связаны с программно-временным управляющим устройством.
Это устройство, как и устройство в [1] не обеспечивает возможности достаточного приближения условий испытаний к эксплуатационным. Это происходит потому, что ось вращения приводного рычага, связанного с приводным и загрузочным гидроцилиндрами совпадает с геометрической осью вращения закрылка, что ограничивает пределы изменения направления векторов нагрузок на секции закрылков, т.е. это изменение практически не возможно, так как установленный таким образом приводной рычаг ориентирован относительно испытываемого закрылка. Указанный недостаток ограничивает также и область использования устройства.
Целью изобретения является приближение условий испытаний к эксплуатационным и расширение области использования устройства за счет обеспечения возможности изменения направления вектора аэродинамической нагрузки, соответствующего эксплуатационным режимам.
Поставленная цель достигается тем, что устройство для испытания отклоняемых аэродинамических поверхностей летательного аппарата, содержащее шарнирно установленные на основании и соединенные с приводными гидроцилиндрами рычаги, соединенные с ними загрузочные гидроцилиндры, связанные с испытываемыми поверхностями рычажные системы, программно-временное управляющее устройство, соединенное с приводным и загрузочным гидроцилиндрами, и датчики положения, связанные с приводными рычагами и програмно-временным управляющим устройством, снабжено дополнительными рычагами, каждый из которых шарнирно соединен с загрузочным гидроцилиндром, а концы их шарнирно соединены с соответствующими концами приводных рычагов и с тензодинамометрами, каждый из которых соединен с соответствующей рычажной системой, связанной с испытываемой поверхностью, при этом выходное звено каждого датчика положения через промежуточный рычаг соединено с соответствующей упомянутой рычажной системой, а тензодинамометры с программно-временным управляющим устройством.
Таким образом, за счет введения дополнительного рычага, соединенного с приводным рычагом, тензодинамометром и с загрузочным цилиндром, а также установки датчика положения на тензодинамометре обеспечена возможность ориентации вектора нагрузки, которым является продольная ось тензодинамометра, и одновременно имитации результирующей аэродинамической нагрузки, соответствующей эксплуатационным режимам. В результате этого условия испытаний приближаются к эксплуатационным и расширяется область использования устройства, т. е. появляется возможность имитации нагрузки не только на выдвигающийся (совершающий поступательное перемещение), но и на отклоняющийся (поворачивающийся вокруг оси) элемент аэродинамической поверхности.
На фиг. 1 показана кинематическая схема устройства при убранном положении закрылка; на фиг. 2 расположение звеньев устройства при убранном и выпущенном положении закрылка; на фиг. 3 проиллюстрировано перемещение начальной точки вектора результирующей аэродинамической нагрузки.
Устройство содержит установленные на основании 1 (фиг. 1) приводные гидроцилиндры 2 и 3 и рычаги 4 и 5, шарнирно соединенные с гидроцилиндрами 2 и 3. Концы приводных рычагов 4 и 5 шарнирно соединены с дополнительными рычагами 6 и 7, концы которых в свою очередь шарнирно соединены с тензодинамометрами 8 и 9. При этом рычаги 4 и 6 шарнирно соединены между собой загрузочным гидроцилиндром 10, рычаги 5 и 7 шарнирно соединены между собой загрузочным гидроцилиндром 11, а тензодинамометры 8 и 9 соединены с соответствующими рычажными системами 12 и 13, связанными с испытываемыми звеньями основным 14 и хвостовым 15.
На каждом тензодинамометре 8 и 9 установлены датчики положения 16 и 17, выходные звенья 18 и 19 которых через промежуточные звенья 20 и 21 соединены соответственно с рычажными системами 12 и 13. Приводные гидроцилиндры 2 и 3, загрузочные гидроцилиндры 10 и 11, датчики положения 16 и 17 и тензодинамометры 8 и 9 соединены с программно-временным управляющим устройством (ПВУУ) 22.
Устройство работает следующим образом.
Установленный на крыле 23 (фиг. 2) закрылок приводят в движение от штатной системы управления через ПВУУ 22. В результате этого основное звено 14 и хвостовое звено 15 перемещаются по расчетным траекториям. Тензодинамометры 8 и 9 при этом занимают заданное положение относительно звеньев 14 и 15, которое поддерживается с помощью приводных гидроцилиндров 2 и 3, работающих в программно-следящем режиме от ПВУУ 22 и определяется уровнем сигнала с каждого датчика положения 16 и 17, который поступает в ПВУУ 22. При этом оси тензодинамометров 8 и 9 совпадают с направлением вектора действия нагружающей силы. Нагружение основного 14 и хвостового 15 звеньев происходит с помощью работающих в программно-следящем режиме гидроцилиндров загружения 10 и 11 через рычаги 6 и 7, тензодинамометры 8 и 9 и рычажные системы 12 и 13 и определяется уровнем сигнала с каждого тензодинамометра 8 и 9, который поступает в ПВУУ 22.
Таким образом ориентация тензодинамометров 8 и 9, оси которых совпадают с направлением вектора нагружающей силы, происходит за счет изменения положения точек "А" и "А'", которые являются начальными точками вектора нагружающей силы. В результате этого обеспечивается перемещение точек "а" и "а'" не только по окружности 1 (фиг. 3), центр которой совпадает с осью вращения рычага 4 в точке крепления его к основания 1 (для наглядности на фиг. 3 изображены только приводной рычаг 4 и дополнительный 6 механизма загружения основного звена 14. Механизм загрузки хвостового звена 15 является зеркальным отражением первого), но и кривым II, III, IY при соблюдении следующего условия: точки "А" и "АI" должны быть расположены в области А-А1 и В-В1, которая ограничена крайними положениями рычагов 4 и 6. Ограничение области по линии А-B определяется крайним левым положением рычага 4 и крайними верхними и нижними положениями рычага 6. Ограничение области по линии А1-В1 определяется крайним правым положением рычага 4 и крайним верхним и нижним положениями рычага 6. Ограничение области по линии А-А1 определяется крайним нижним положением рычага 6 и крайним левым и правым положением рычага 4.
Ограничение области по линии В-В1 определяется крайним верхним положением рычага 6 и крайним левым и правым положением рычага 4. Таким образом изменение положения точек "А" и "АI" может происходить практически по любой кривой, вписывающейся в эту область, определяемую размерами и взаимным расположением рычагов 4 и 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ЗАКРЫЛКА САМОЛЕТА | 1994 |
|
RU2078321C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ДВУХСЕКЦИОННЫХ РУЛЕВЫХ ПОВЕРХНОСТЕЙ САМОЛЕТА | 1990 |
|
RU1762621C |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ОПОРЫ ШАССИ САМОЛЕТА | 1989 |
|
RU1658718C |
| СИСТЕМА УПРАВЛЕНИЯ ЗАКРЫЛКАМИ САМОЛЕТА | 1992 |
|
RU2065377C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ЭЛЕМЕНТОВ МЕХАНИЗАЦИИ КРЫЛА САМОЛЕТА | 1996 |
|
RU2095775C1 |
| РУЧКА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
RU2018459C1 |
| ГРУЗОВОЙ ОТСЕК ЛЕТАТЕЛЬНОГО АППАРАТА | 1995 |
|
RU2099240C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ НА ПРОЧНОСТЬ ЗАКРЫЛКА САМОЛЕТА | 1989 |
|
SU1607558A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU1707896C |
| УСТРОЙСТВО ДЛЯ СУШКИ МЕХОВЫХ ШКУР | 1990 |
|
RU2027768C1 |
Изобретение относится к испытательному оборудованию и предназначено для испытаний аэродинамических поверхностей. Устройство содержит приводные гидроцилиндры 2 и 3, шарнирно соединенные с приводными рычагами 4 и 5, и загрузочные гидроцилиндры 10 и 11, каждый из которых шарнирно соединен с соответствующими приводным 4(5), и дополнительным 6(7) рычагами, и через тензодинамометры 8 и 9 и рычажные системы 12 и 13 связаны с испытываемыми отклоняемыми звеньями 14 и 15. При этом каждый тензодинамометр снабжен датчиком положения 16 и 17, выходные звенья которых 18 и 19 также связаны с рычажными системами 12 и 13. Приводные гидроцилиндры 2 и 3, загрузочные гидроцилиндры 10 и 11, тензодинамометры 8 и 9 и датчики положения 16 и 17 соединены с программно-временным управляющим устройством 22. 3 ил.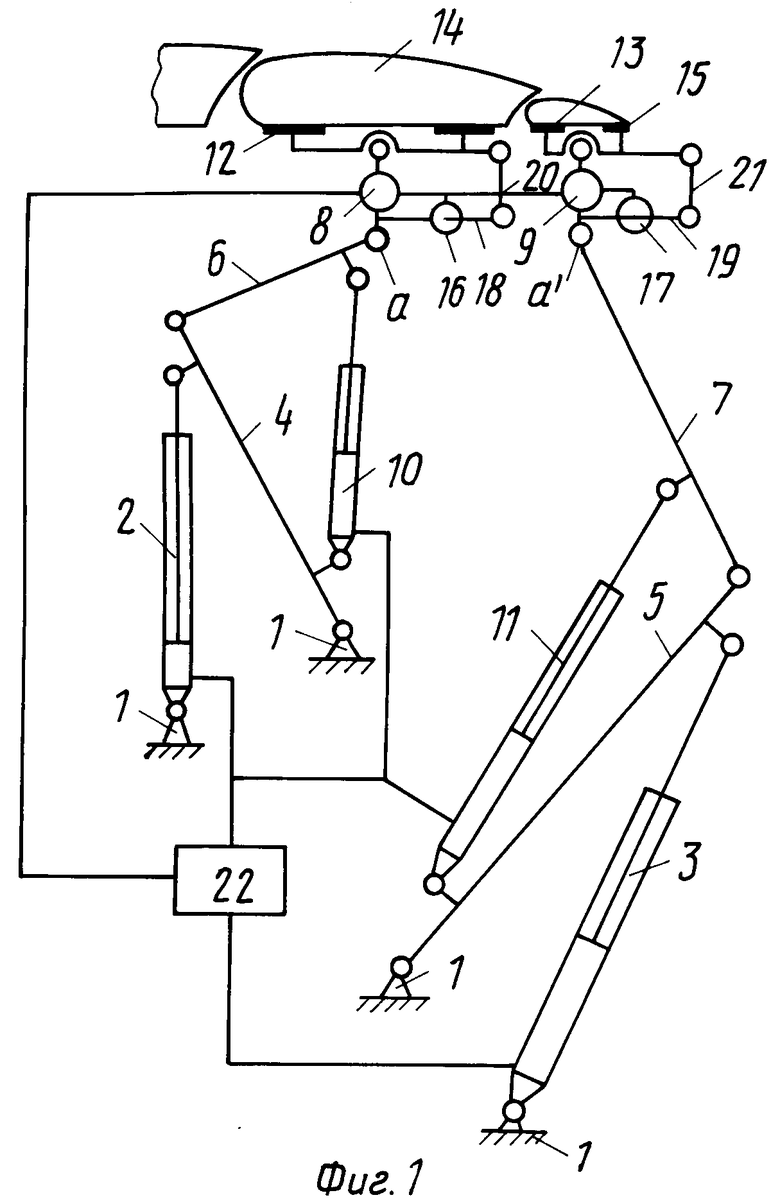
УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ОТКЛОНЯЕМЫХ АЭРОДИНАМИЧЕСКИХ ПОВЕРХНОСТЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащее приводные рычаги, шарнирно установленные на основании, соединенные с приводными и загрузочными гидроцилиндрами рычажные системы, связанные с испытываемыми поверхностями, программно-временное управляющее устройство, соединенное с приводными и загрузочными гидроцилиндрами, и датчики положения, связанные с приводными рычагами и программно-временным управляющим устройством, отличающееся тем, что оно снабжено дополнительными рычагами и тензодинамометрами, каждый из дополнительных рычагов шарнирно соединен с загрузочным гидроцилиндром, а концы их шарнирно соединены с соответствующими концами приводных рычагов и тензодинамометрами, каждый из которых соединен с соответствующей рычажной системой, при этом выходное звено каждого датчика положения соединено с соответствующей рычажной системой через промежуточное звено, а тензодинамометры соединены с программно-временным управляющим устройством.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ ЗАКРЫЛКА ЛЕТАТЕЛЬНОГОАППАРАТА | 0 |
|
SU313115A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
