Изобретение относится к машиностроению, а именно к средствам виброизоляции различных объектов.
Известен способ виброизоляции, заключающийся в том, что виброизолированную платформу связывают с основанием посредством цилиндрических винтовых пружин и двуплечих рычагов, попарно связанных посредством гибких связей с основанием и платформой [1]
Наиболее близким техническим решением в части способа является способ виброизоляции, заключающийся в гашении колебаний объекта, посредством подвески в виде шарнирно-рычажных механизмов, связанных с платформой и основанием. Подвески в виде шарнирно-рычажного механизма обеспечивают только гашение линейных и угловых колебаний объекта на платформе по пяти направлениям [2]
Недостатком известного способа виброизоляции является сравнительно невысокая эффективность виброизоляции за счет отсутствия эффекта виброизоляции по вертикальному направлению (шестой координате).
Известен виброизолятор, содержащий виброизолированную платформу, связанную с основанием посредством упругих элементов и шарнирно-рычажных механизмов [3]
Наиболее близким техническим решением заявленного объекта в части устройства для реализации способа виброизоляции является виброизолятор, содержащий исполнительный орган, размещенный на основании, акселерометр, блок управления исполнительным органом и усилитель мощности [4]
Недостатком известного виброизолятора является сравнительно невысокая эффективность виброизоляции в горизонтальных и угловых направлениях из-за жесткой связи исполнительного органа с виброизолируемой платформой и основанием.
Техническим результатом изобретения является повышение эффективности пространственной виброизоляции путем увеличения числа степеней свободы подвески до 6 степеней за счет применения независимых виброизоляторов активного типа.
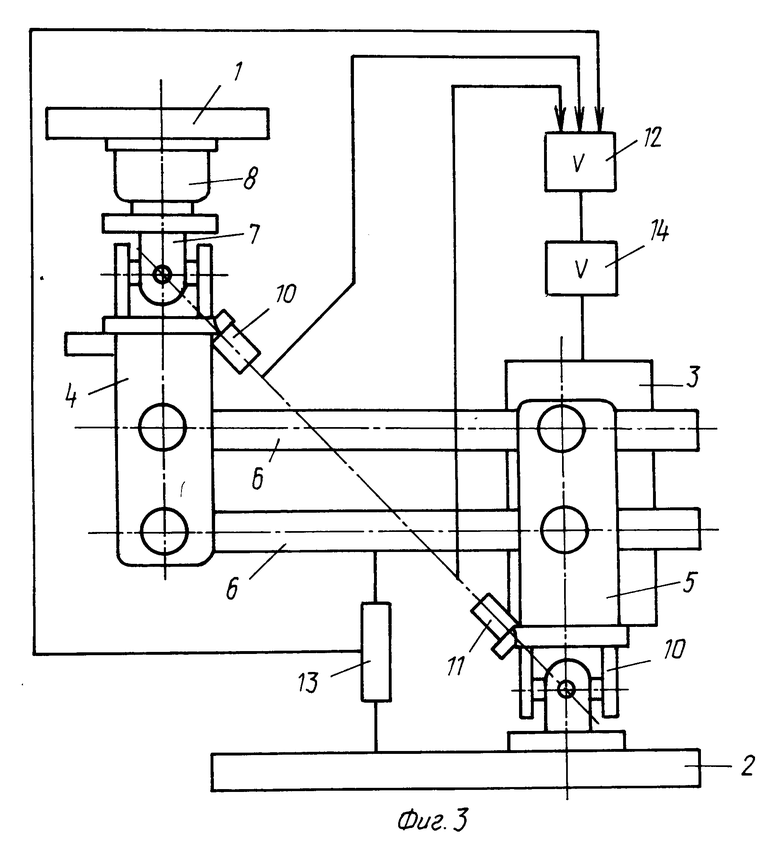
Это достигается тем, что в способе виброизоляции, заключающимся в гашении колебаний объекта посредством подвески в виде шарнирно-рычажных механизмов, связанных с платформой и основанием, подвеске обеспечивают 6 степеней свободы путем выполнения ее в виде 6 шарнирно-рычажных механизмов, связанных через упругие элементы с платформой, при размещении четырех из которых их проекции на горизонтальную плоскость лежат на сторонах квадрата, вписанного в горизонтальную проекцию платформы, проекция пятого шарнирно-рычажного механизма лежит на диагонали этого квадрата, а проекция шестого - перпендикулярна этой диагонали и заключена внутри квадрата, а в процессе гашения колебаний измеряют акселерометрами ускорения шарнирно-рычажных механизмов, затем измеряют относительное перемещение платформы относительно основания датчиком относительных перемещений и подают сигналы в блок управления, выход которого подключают к исполнительному органу.
Это достигается тем, что в виброизолятор содержащий исполнительный орган, размещенный на основании акселерометр, блок управления и усилитель мощности введены платформа, датчик относительных перемещений относительно основания и дополнительный акселерометр, причем исполнительный орган соединен с платформой через шарнирно-рычажный механизм параллелограммного типа, состоящий из скоб, расположенных на разных расстояниях относительно основания, связанных между собой параллельными рычагами, причем одна скоба посредством шарнира Гука и упругого элемента связана с платформой, а другая скоба через шарнир Гука связана с основанием, причем акселерометры установлены на скобах таким образом, что измеряют составляющие ускорений, действующих по линии, соединяющей центры шарниров Гука, а блок управления выполнен в виде микропроцессора, вход которого связан с акселерометрами и датчиком относительных перемещений платформы, а усилитель мощности подключен между микропроцессором и исполнительным органом. Причем исполнительный орган выполнен в виде самотормозящейся червячной передачи.
На фиг. 1 изображена схема для реализации предложенного способа виброизоляции; на фиг. 2 представлена схема расположения подвески; на фиг. 3 дан общий вид шарнирно-рычажной подвески; на фиг. 4 изображена фронтальная проекция исполнительного органа.
Способ виброизоляции осуществляют следующим образом.
Виброизолируемый объект (на чертеже не показан) устанавливают на платформу 1 (см. схему устройства для реализации способа на фиг. 1), которую связывают с основанием 2 посредством подвески в виде шарнирно-рычажных механизмов 3, при этом подвеске обеспечивают 6 степеней свободы путем выполнения ее в виде 6 независимых шарнирнорычажных механизмов, причем верхнюю часть каждого из 6 шарнирно-рычажных механизмов 3 соединяют с платформой 1 через упругий элемент 4, который является фильтром высоких частот. Шарнирно-рычажные механизмы 3 размещают таким образом, что проекции на горизонтальную плоскость четырех из них лежат на сторонах квадрата, вписанного в горизонтальную проекцию платформы 1 (см. фиг. 2), проекция пятого шарнирно-рычажного механизма лежит на диагонали этого квадрата, а проекция шестого перпендикулярна этой диагонали и заключена внутри квадрата, а в процессе гашения колебаний измеряют акселерометром ускорения шарнирно-рычажных механизмов, затем измеряют относительное перемещение платформы 1 относительно основания 2 датчиком относительных перемещений, и подают сигналы в блок управления, выход которого подключают к исполнительному органу.
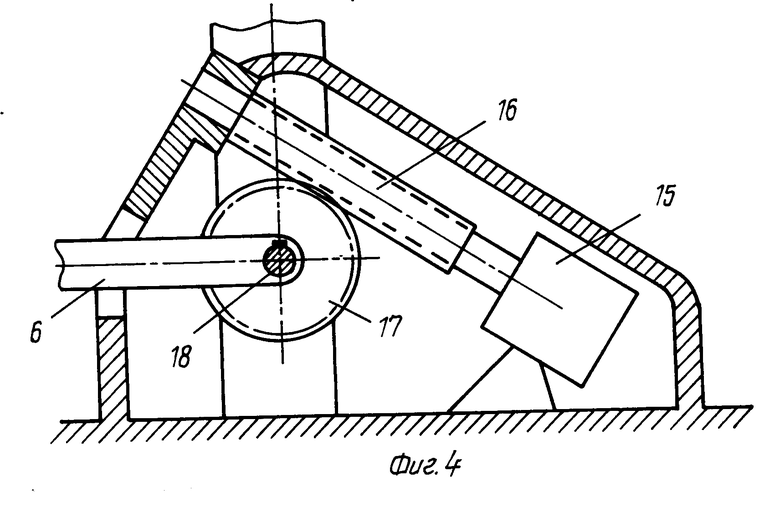
Виброизолятор активного типа для реализации данного способа виброизоляции содержит платформу 1 и основание 2, между которыми расположен исполнительный орган 3. Исполнительный орган 3 соединен с платформой 1 через шарнирно-рычажный механизм параллелограммного типа, состоящий из расположенных на разных расстояниях относительно основания 2 скоб 4,5, связанных между собой параллельными рычагами 6. Скоба 4 посредством шарнира, выполненного в виде шарнира Гука 7, и упругого элемента 8 связана с платформой 1, а скоба 5 через шарнир Гука 9, выполненный также в виде шарнира Гука, связана с основанием 2. Акселерометры 10 и 11 установлены соответственно на скобах 4 и 5 таким образом, что измеряют составляющие ускорений, действующих на оси, соединяющей центры шарниров Гука 7 и 9. Блок управления состоит из управляющего микропроцессора 12, на выход которого поступают сигналы с акселерометров 10 и 11 и датчика относительного перемещения 13, установленного между параллельными рычагами 6 и основанием 2. Управляющий микропроцессор состоит из трех аналого-цифровых преобразователей, предварительных фильтров нижних частот аналогового типа, центрального процессора и цифро-аналоговых преобразователей (на чертеже не показаны). Выход управляющего микропроцессора 12 соединен со входом усилителя мощности 14, управляющего исполнительным органом 5, который выполнен в виде самотормозящейся червячной передачи, соединенной с электродвигателем 15 и состоящей из червяка 16 и червячного колеса 17. Червячное колесо 17 жестко (например, посредством шпоночного соединения) сидит на оси 18, соединяющей одну из пар параллельных рычагов 6. Червячная передача выполнена самотормозящейся для того, чтобы исключить обратное влияние колебаний платформы на электродвигатель 15 исполнительного органа 3.
Устройство для осуществления предложенного способа виброизоляции работает следующим образом.
Акселерометры 10 и 11 измеряют виброускорения соответственно скобы 4 и основания 2 по линии, соединяющей центры шарниров Гука, а датчик относительного перемещения 13 регистрирует их относительное перемещение. От акселерометра 10 и датчика 13 осуществляется управление по обратным связям (основной алгоритм управления), а от акселерометра 11 на это основное управление накладывается дополнительный сигнал управления, который называется инвариантным. Суть его состоит в том, что он делает ускорение, измеряемое акселерометром 10, равным нулю, т.е. как бы платформа 1 становится неподвижной в инерционном пространстве (это утверждение справедливо только для области низких частот, которую пропускают сервопривод в виде двигателя с червячной передачей). В то же время, если на основании 2 зафиксированы большие ускорения, то относительное положение двух скоб может выйти за допустимые пределы перемещений (система может выйти на жесткие упоры). Для предотвращения этой ситуации, когда перемещение достигло предельно допустимой величины, включается другой алгоритм управления, заключающийся в следующем. Сигнал от акселерометра 11 отключается и система управления по обратным связям от акселерометра 10 и датчика относительных перемещений 13. Это происходит до тех пор пока относительное перемещение не достигнет величины, меньшей, чем предельно допустимая, упомянутая выше, после чего включается основной алгоритм управления.
Данный способ виброизоляции и устройство для его осуществления обеспечивают высокую эффективность пространственной виброизоляции, а также высокую надежность системы управления на базе аналого-цифровой вычислительной техники.
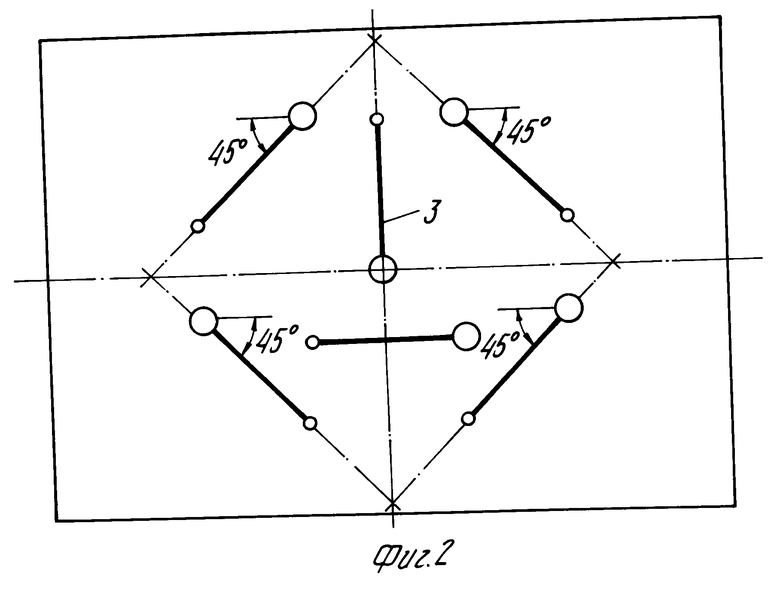
Изобретение относится к машиностроению, а именно, к средствам виброизоляции различных объектов. Сущность изобретения: способ виброизоляции осуществляют следующим образом. Виброизолируемый объект (на чертеже не показан) устанавливают на платформу 1, которую связывают с основанием 2 посредством подвески в виде шарнирно-рычажных механизмов 3, при этом подвеске обеспечивают 6 степеней свободы путем выполнения ее в виде 6 независимых шарнирно-рычажных механизмов (виброизоляторов), причем верхнюю часть каждого из 6 шарнирно-рычажных механизмов соединяют с платформой через упругий элемент 4, который является фильтром высоких частот. Виброизоляторы размещают таким образом, что проекции на горизонтальную плоскость четырех шарнирно-рычажных механизмов лежат на сторонах квадрата, вписанного в горизонтальную проекцию платформы 1, проекция пятого шарнирно-рычажного механизма лежит на диагонали этого квадрата, а проекция шестого - перпендикулярна этой диагонали и заключена внутри квадрата. Устройство для осуществления предложенного способа виброизоляции работает следующим образом. Акселерометры 11 и 12 измеряют виброускорения соответственно скобы 6 и основания 2 по линии, соединяющей центры шарниров Гука, а датчик относительного перемещения 14 регистрирует их относительное перемещение. От датчиков 11 и 14 осуществляется управление по обратным связям (основной алгоритм управления), а от датчика 12 на это основное управление накладывается дополнительный сигнал управления, который называется инвариантным. Суть его состоит в том, что он делает ускорение, измеряемое датчиком 11, равным нулю, т.е. как бы платформа 1 становится неподвижной в инерциальном пространстве (это утверждение справедливо только для области низких частот, которую пропускают сервопривод в виде двигателя с червячной передачей). В то же время, если на основании 2 зафиксированы большие ускорения, то относительное положение двух скоб может выйти за допустимые пределы перемещений (система может выйти на жесткие упоры). Для предотвращения этой ситуации, когда перемещение достигло предельно допустимой величины, включается другой алгоритм управления, заключающийся в следующем. Сигнал от акселерометра 12 отключается и система управления по обратным связям от датчика ускорений 11 и датчика относительных перемещений 14. Это происходит до тех пор, пока относительное перемещение не достигнет величины, меньшей, чем предельно допустимая, упомянутая выше, после чего включается основной алгоритм управления. 2 с. и 1 з.п. ф-лы, 4 ил.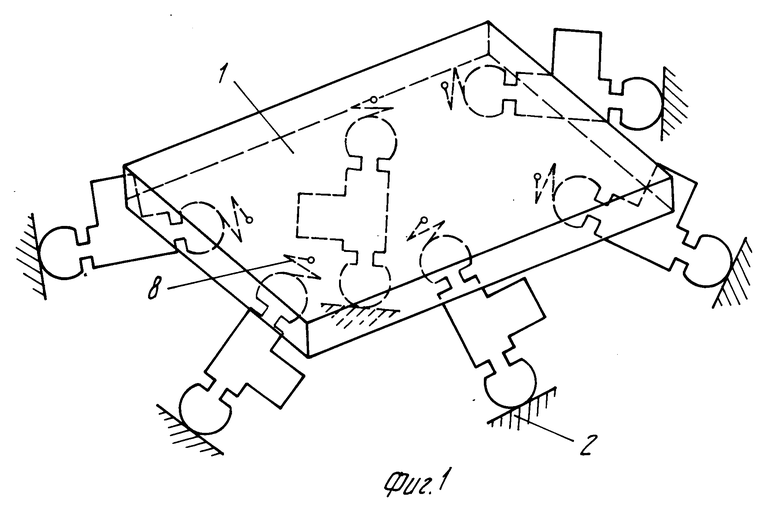
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 783517, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1521955, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| SU, авторское свидетельство, 783517, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| SU, авторское свидетельство, 1087717, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
