Изобретение относится к области геофизики, а более конкретно - к способам съемки параметров гравитационного поля Земли.
Известен способ гравиметрической съемки на движущемся объекте, включающий измерения приращения УСТ гравиметром, неподвижно установленном на объекте-носителе, определение широты места, пути и абсолютной скорости объекта навигационным средством, вычисление по полученным данным поправки на эффект Этвеша [1 Гайнанов А.Г., Пантелеев В.Л. Морская гравиразведка. - М: «Недра», - 1991. - 214 с., Железняк Л.К., Конешов В.Н. Изучение гравитационного поля Мирового океана // Вестник Российской Академии Наук. 2007, том 77, №5, с. 408-419.] и вычисление УСТ в морских гравиметрических пунктах.
Также известен способ определения УСТ в море, включающей измерение УСТ гравиметром, неподвижно установленным на подвижном основании, определение широты места, пути объекта и абсолютной скорости гравиметра навигационным средством, вычисление по полученным данным поправки на эффект Этвеша и искомого УСТ [Способ морской гравиметрической съемки (19) RU (11) 2440592 (13) С2 (51) МПК G01V 11/00 (2006.01)(21)(22) Заявка: 2010110411/28, 2010.03.18 (24) Дата начала отчета срока действия патента: 2010.03.18 (22) Дата подачи заявки: 2010.03.18 (45). Опубликовано: 2012.01.20].
Известное устройство для осуществления способа содержит функционально соединенные и расположенные на стабилизированной в горизонтальной плоскости платформе чувствительную систему, блок управления, навигационное средство, вычислитель и регистратор.
Недостаток известных способов и устройства заключаются в том, что они имеют недостаточно высокую точность определения УСТ на движущемся объекте при выполнении морской гравиметрической съемки. Это объясняется тем, что при их использовании имеют место существенная погрешность определения поправки на эффект Этвеша и существенная погрешность измерения УСТ, обусловленная искажением измерений за счет значительной (от 3 до 6 мин) постоянной времени низкочастотного фильтра гравиметра и скоростью изменения гравитационного поля, в котором движется объект-носитель. Погрешность возникает также при использовании известных способов и устройства из-за того, что при вычислении поправки на эффект Этвеша по формуле [Гайнанов А.Г., Пантелеев В.Л. Морская гравиразведка. - М: «Недра», - 1991. - 214 с. ]

где V - скорость объекта-носителя; ϕ - широта мета измерения; А - направление вектора скорости объекта-носителя, которая в силу возможностей существующих навигационных средств не может быть измерена с требуемой точностью.
Необходимую точность измерения скорости носителя, чтобы учитывать поправку Этвеша с заданной точностью, можно оценить, продифференцировав функцию (2) по переменным V, А, ϕ и, перейдя к СКП, получить зависимость дисперсии функции как суммы дисперсий аргументов в виде [Зубченко Э.С. Обоснование требований к навигационному обеспечению морской гравиметрической съемки. // Записки по гидрографии, 2017, №302, с. 39-45]

где  - оцениваемая требуемая точность учета поправки Этвеша;
- оцениваемая требуемая точность учета поправки Этвеша;
mν, mА, тϕ - СКП V, А и ϕ, соответственно.
Применяя для оценки принцип равного влияния каждого из членов правой части выражения (3) на погрешность учета поправки Этвеша, получим формулу для оценки допустимой СКП скорости объекта-носителя в зависимости от требуемой точности учета данной поправки

Выражение (3) позволяет оценить требования к точности выработки скорости навигационным комплексом объекта-носителя, выполняющего гравиметрическую съемку. Например, если считать, что поправка Этвеша должна учитываться с погрешностью, не превышающей одной третьей части допустимой погрешности съемки;  [Единые технические требования по Мировой гравиметрической съемке. Часть IV. Инструкция по морской гравиметрической съемке (ИГ-78). - Л.: ГУНиО МО СССР, 1979, с. 6, 7], т.е.
[Единые технические требования по Мировой гравиметрической съемке. Часть IV. Инструкция по морской гравиметрической съемке (ИГ-78). - Л.: ГУНиО МО СССР, 1979, с. 6, 7], т.е.  и, следовательно,
и, следовательно,  . Например, при выполнении морской гравиметрической съемки на скорости 4 узла, пути объекта-носителя, равном 45°, и широте района съемки, равной 60°, требуемая точность учета скорости судна составит mV=0,119 км/час=0,033 м/сек. Рассмотрим насколько выполнимы эти требования современными судовыми средствами навигации.
. Например, при выполнении морской гравиметрической съемки на скорости 4 узла, пути объекта-носителя, равном 45°, и широте района съемки, равной 60°, требуемая точность учета скорости судна составит mV=0,119 км/час=0,033 м/сек. Рассмотрим насколько выполнимы эти требования современными судовыми средствами навигации.
Абсолютные гидроакустические лаги измеряют скорость судна относительно дна с погрешностью 0,2% от измеряемой величины для скоростей менее 10 узлов (при скорости судна 10 узлов это составит 0,01 м/с). [Система инерциальной навигации и стабилизации (СИНС) «Ладога» // http://www.elektropribor.spb.ru/ru/newprod/rekl/ladoga.pdf.]. Такая высокая точность достигается за счет усреднения измеренных значений за период, продолжительность которого у разных образцов лагов может составлять от одной минуты до одного часа. Например, у модели лага 3060 DSVL фирмы ITT Exelis указанная точность достигается при периоде усреднения, равном 1 часу [Model 3060 DSVL System// http://www.edocorp.com/capabilities/ piezoelectric /Documents/Doppler sonar velocity log systems.pdf]. При односекундном усреднении погрешность выработки скорости составляет 0,1 узла или 0,57 м/с.
Рассмотрим возможность решения этой проблемы при измерении скорости с помощью глобальных навигационных спутниковых систем (ГНСС).
Двухчастотные судовые приемники ГНСС, работающие в режиме RTK измерений, например, модели DC201 производства фирмы AD Navigation AS, измеряют скорость судна с погрешностью (доверительная вероятность 68,3%) 0,005 м/с [RTK DGPS Receivers// Hydro International, - 2007, - v. 11, - No 9, - p. 32-37]. Для получения данных о скорости в реальном масштабе времени должен использоваться преемник ГНСС, работающий в режиме RTK, что требует установки специальных корректирующих береговых станций, дальность действия которых ограничивается расстоянием прямой видимости, т.е. около 20 км, а их главным недостатком является невозможность приема сигналов ГНСС под водой.
Выполненный анализ показывает, что требуемая точность измерения скорости объекта-носителя для учета поправки Этвеша современными навигационными средствами недостижима. Более того, существующая практика определения поправки Этвеша путем ее вычисления не по мгновенному значению скорости на момент измерения, а по ее среднему значению за промежуток времени, равный 5-30 мин [Огородова Л.В., Шимбирев Б.П., Юзефович А.П. Гравиметрия. М.: Недра, 1978. 325 с. ] представляется некорректной по своей сути и заведомо приводит к неопределенному результату. На самом деле, каждому отсчету приращения УСТ по гравиметру должна соответствовать поправка Этвеша для скорости объекта в момент взятия отсчета по гравиметру. Для устранения этих ограничений необходимо искать принципиально новый подход.
Другой методической погрешностью известных способов съемки ГПЗ следует признать невозможность точного учета центробежных ускорений при движении объекта по траектории с переменным значением радиуса кривизны. Считается, например, что преобладающий период вертикальных перемещений движущегося подводного объекта составляет 30-120 с, а их амплитуда 2…3 м [Попов Е.И. Определение силы тяжести на подвижном основании. - М.: Наука, 1967, с. 178]. Если для оценки принять траекторию объекта синусоидальной с амплитудой 2 м и пространственным периодом, равным расстоянию, проходимому объектом за 120 с со скоростью 4 узла, центробежные ускорения могут достигать значения от 1,3 до 546 мГал и их учет требует специального технического решения.
Гравитационное и инерционное ускорения невозможно отделить друг от друга физическими методами, но при измерении в движении их частотные характеристики часто не совпадают. Практически задача определения силы тяжести на подвижном основании решается частотной фильтрацией с синхронными вычислениями инерционных ускорений по траекторным измерениям неинерциальными приборами.
Как следует из приведенных в [Применение гравиинерциальных технологий в геофизике. - СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2002, - 199 с.] частотных характеристик идеального фильтра, предназначенного для подавления помех с частотами >0,4 10-2 Гц, сигнал помех, формируемый движением объекта-носителя по синусоидальной траектории и имеющий частоты в диапазоне 3 10-2 - 8 10-3 с-1 с амплитудой от 1,3 до 546 мГал, не будет подавляться даже идеальным фильтром и, следовательно, будет вносить погрешность в измеряемый гравиметром полезный сигнал.
Таким образом, из-за недостаточной точности учета поправки Этвеша и учета динамических ускорений современные способы гравиметрической съемки и используемые для этого технические средства не позволяют достичь требуемой точности.
Данное изобретение направлено на преодоление недостатков существующих способов и технических средств морской гравиметрической съемки. Для повышения точности гравиметрических измерений на подвижном основании в предлагаемом изобретении предлагается использование градиентометрических измерений. Гравитационная градиентометрия включает измерение пространственных изменений (градиентов) ГПЗ.
Гравитационный градиентометр (ГГ), ориентированный осями чувствительности в топоцентрической координатной системе (ТКС), связанной с ГПЗ, измеряет компоненты тензора градиента силы тяжести, представленных формулой [Colm A. Murphy The Air-FTG™ airborne gravity gradiometer system// Geoscience Australia Record 2004/18 Airborne Gravity 2004 Abstracts from the ASEG-PESA Airborne Gravity 2004 Workshop Edited by Richard Lane // [Электронный ресурс]. Режим доступа: https://docviewer.yandex.ru/view/. (дата доступа 2.06.20)].

где Wij (i, j принимают попеременно обозначения осей координатной системы х, у, z) - градиенты составляющих вектора силы тяжести (Wx, Wy, Wz) по осям х, у, z ТКС.
На ограниченном участке земной поверхности Wx << Wz, Wy << Wz, и поэтому можно считать, что  , тогда последняя строка матрицы (1) - составляющие градиента УСТ, т.е.:
, тогда последняя строка матрицы (1) - составляющие градиента УСТ, т.е.:

Это приближение используется в прикладной геофизике [Торге В. Гравиметрия: Пер. с англ. - М., Мир, 1999. - 429 с., ил.].
При небольших расстояниях в плане и по высоте составляющие гравитационного градиента (5) можно представить в виде

где  ,
,  ,
,  - разности измеряемых вертикальных составляющих УСТ на осях ТКС;
- разности измеряемых вертикальных составляющих УСТ на осях ТКС;
Δх, Δy, Δz - расстояния между точками измерений вертикальных составляющих УСТ на осях ТКС.
В ГГ измеряют смещения двух или большего числа пробных масс в неоднородном гравитационном поле измерительной системы. При этом полагают, что градиент постоянен.
В системе с поступательным движением (осевая система) датчиком служит пара акселерометров. Составляющие УСТ действуют в направлениях осей чувствительности акселерометров. Разность измеренных по каждой из осей ускорений позволяет получить составляющие градиента УСТ по этим осям:

где axi, ayi, azi (i=1,2) - ускорения, измеренные акселерометрами, установленными по осям ТКС прибора;
bх, by, bz - расстояния между нулями отсчетов пар акселерометров по осям ТКС прибора.
Гравитационный градиентометр, ориентированный в ТКС, связанной с гравитационным полем, измеряет компоненты тензора градиента силы, измеряя разность ускорений, воздействующих на близкие пробные массы, а градиент вычисляется по разности их измеряемых перемещений (осевая система с поступательным движением), либо углов поворота (вращательная система). Эти перемещения измеряют оптическими или электрическими устройствами.
Чтобы получить градиент с ошибкой ±1 нc-2, необходимо измерять ускорение с ошибкой ±1 нм с-2, что соответствует 10-10 g [Торге В. Гравиметрия: Пер. с англ. - М.: Мир, 1999. - 429 с., ил.].
Гравитационные градиентометры содержат комбинации пар датчиков с различной пространственной ориентировкой. Например, ортогональное расположение трех систем с поступательным движением, образованных трехосными акселерометрами, позволяет получить все девять компонент тензора силы тяжести, четыре из которых будут избыточными величинами [Colm A. Murphy The Air-FTG™ airborne gravity gradiometer system// Geoscience Australia Record 2004/18 Airborne Gravity 2004 Abstracts from the ASEG-PESA Airborne Gravity 2004 Workshop Edited by Richard Lane // [Электронный ресурс] [Электронный ресурс]. Режим доступа: https://docviewer.yandex.ru/view/. (дата доступа 2.06.20)]..
В отличие от измерений на неподвижном основании при работе в динамическом режиме приборная ТКС движется относительно системы координат, фиксированной в пространстве; при этом возникают линейные и центробежные ускорения подвижного носителя.
Образуя разность ускорений, измеренных парой акселерометров, влияние негравитационных поступательных ускорений исключается. Если же градиентометр стабилизирован в инерциальном пространстве, то члены, описывающие вращения, также исключаются. В различных известных конструкциях градиентометров используется разное число пар акселерометров с различным расположением, которые измеряют до девяти компонент тензора. Разрабатываются традиционные электронные схемы, а также схемы, использующие эффект сверхпроводимости. Измерения выполняются со сравнительно большой частотой (например, через 1 с), перед последующей обработкой результаты усредняются (например, за 10 с). Чувствительность акселерометров при наземных измерениях должна быть порядка 101-100 нc-2. При осреднении за 10 с ожидаемая точность будет ±3-0,3 нc-2 [Торге В. Гравиметрия: Пер. с англ. - М.: Мир, 1999. - 429 с., ил.]. Поскольку величины градиентов и возмущающих ускорений велики, необходимо, чтобы приборы имели большой динамический диапазон. И наконец, повышенные требования предъявляются к стабильности во времени и надежности учета дрейфа.
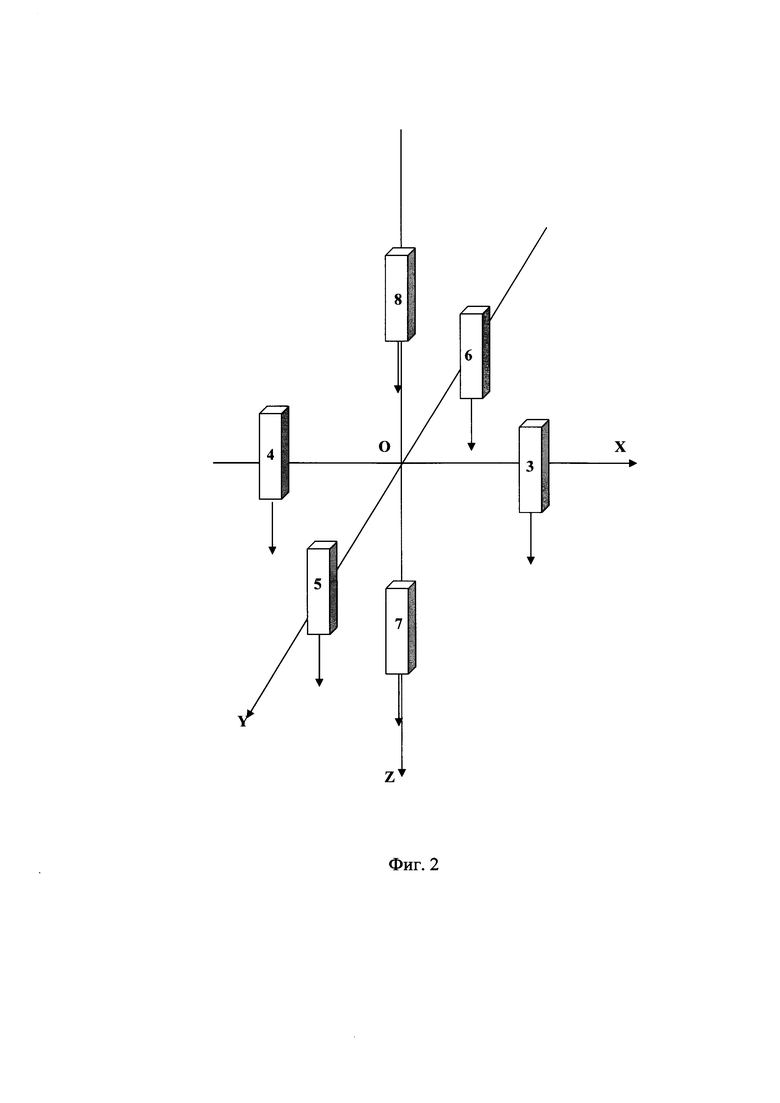
Для исключения неустранимых существующими способами и средствами недостатков в данном изобретении предлагается на одной гиростабилизируемой в горизонтальной плоскости платформе и ориентируемой по направлению на север имитирующей ТКС (с осью абсцисс, направленной на север, с направленной по отвесу вниз осью аппликат, и дополняющей координатную систему до правосторонней осью ординат), установить по осям ТКС три пары акселерометров по одной паре на каждую так, чтобы их оси чувствительности совпадали с направлением оси аппликат ТКС как показано на фиг. 1.
Акселерометры измеряют деформацию упругого элемента при действии суммы ускорений на пробную массу с одной степенью свободы относительно корпуса, а гиростабилизируемая платформа непрерывно совмещает ось чувствительности (линию перемещения пробной массы) с направлением силы тяжести (с местной вертикалью).
Согласно данному изобретению для реализации предлагаемого способа морской гравиметрической съемки предлагается съемочная система, устанавливаемая на носителе съемочной аппаратуры, например, автономном необитаемом подводном аппарате (далее - носитель), включающая гравиметрический градиентометр (далее - градиентометр). Градиентометр, включающий платформу и систему стабилизации платформы в горизонтальной плоскости и в плоскости меридиана, воспроизводящую топоцентрическую координатную систему, первой пары акселерометров, устанавливаемых на горизонтальной платформе на оси абсцисс симметрично на фиксированном расстоянии от начала воспроизводимой ТКС и ориентированные осью чувствительности, по направлению оси аппликат, удерживаемому системой стабилизации в плоскости меридиана (на север), для измерения и генерации сигналов смещения пробной массы от исходного положения и соответствующих им сигналов ускорения; вторая пара акселерометров, устанавливаемых на той же платформе на оси ординат ТКС симметрично на фиксированном расстоянии от ее начала и ориентированных осью чувствительности, по направлению оси аппликат, предназначенный для измерения и генерации сигналов смещения пробной массы от начального положения и соответствующих этим смещениям сигналов ускорения, третья пара акселерометров на вертикальной штанге, жестко скрепленной в начале ТКС с этой же горизонтальной стабилизируемой платформой и совпадающей по направлению ее осью аппликат для измерения смещения пробных масс акселерометров третьей пары относительно исходного положения и генерации сигналов ускорений, соответствующих этим смещениям пробных масс; электронный блок для приема и сигналов ускорения от акселерометров каждой пары и сигналов смещения от устройств слежения для обработки сигналов и вычисления составляющих градиента УСТ по формулам (4) и последующего вычисления по этим данным и по данным навигационной системы носителя о его перемещении в ТКС с началом в начальной точке съемки в текущий морской гравиметрический пункт значения УСТ в морских гравиметрических пунктах по формуле

где  - значение УСТ, измеренное на опорном пункте;
- значение УСТ, измеренное на опорном пункте;
K - количество измерений градиентометром вертикального градиента при всплытии носителя со дна на глубину выполнения съемки;
k=1, 2…К - номер градиентометрического измерения при всплытии носителя со дна на глубину выполнения съемки;
Wzzk - измерений градиентометром вертикальный градиент УСТ при всплытии носителя со дна на глубину выполнения съемки;
h - высота носителя над дном, достигаемая им при всплытии со дна на глубину выполнения съемки;
i=1, 2,…n - номер градиентометрического измерения на съемочном галсе;
Wzxi, Wzyi, Wzzi - измеренные составляющие тензора градиента УСТ по осям X, Y и Z соответственно;
Xi, Yi, Zi - составляющие пути, пройденного носителем от опорного пункта в данную точку измерений;
j=1, 2,…m - номер градиентометрического измерения при всплытии (погружении) носителя;
Wzzj - составляющая тензора градиента УСТ по оси Z, измеренная при всплытии (погружении) носителя;
z - глубина, на которой производилась съемка;
ζ - поправка на высоту уровня над средним уровнем моря.
Используя известный прием вывода дисперсии функции через дисперсии аргументов, для выражения (1) получим:

где  - средняя квадратическая ошибка съемки УСТ гравиметрическим градиентометром;
- средняя квадратическая ошибка съемки УСТ гравиметрическим градиентометром;
 - средняя квадратическая ошибка определения опорного значения УСТ на опорном пункте;
- средняя квадратическая ошибка определения опорного значения УСТ на опорном пункте;
S - путь, проходимый носителем при съемке от опорного пункта по галсам съемки до этого же опорного пункта.
 - средняя квадратическая погрешность измерения вертикальной составляющей тензора градиента УСТ.
- средняя квадратическая погрешность измерения вертикальной составляющей тензора градиента УСТ.
Принимая среднюю квадратическую ошибку измерения опорного значения УСТ на опорном пункте равной точности измерения УСТ баллистическим гравиметром, т.е.  [Баллистический абсолютный гравиметр ГАБЛ-ПМ для полевых работ. Институт автоматики и электрометрии СО РАН (ИАиЭ СО РАН). [Электронный ресурс]. Режим доступа: https://docviewer.yandex.ru/view/ (дата доступа 15.06.20)], a среднюю квадратическую погрешность измерения вертикальной составляющей тензора градиента УСТ, т.е.
[Баллистический абсолютный гравиметр ГАБЛ-ПМ для полевых работ. Институт автоматики и электрометрии СО РАН (ИАиЭ СО РАН). [Электронный ресурс]. Режим доступа: https://docviewer.yandex.ru/view/ (дата доступа 15.06.20)], a среднюю квадратическую погрешность измерения вертикальной составляющей тензора градиента УСТ, т.е.  для пути, проходимому АНПА, например, со скоростью 4 узла за максимальное время его автономного плавания, например, 24 часа получим, что средняя квадратическая ошибка съемки УСТ гравиметрическим градиентометром составит
для пути, проходимому АНПА, например, со скоростью 4 узла за максимальное время его автономного плавания, например, 24 часа получим, что средняя квадратическая ошибка съемки УСТ гравиметрическим градиентометром составит  .
.
Акселерометры могут быть смонтированы в корпусе, стабилизирующем температуру. Электронные акселерометры позволяют осуществить более точное и быстрое измерение параметров перемещения положения закрепленной массы. Подобные устройства внешне могут представлять собой миниатюрный чип для микросхемы, габариты которого не превышают 10 мм. Например, емкостной трехосевой МЭМС-акселерометр с цифровым выходом изготовлен по специальной технологии 3D-M3MC. В корпусе датчика находятся высокоточный чувствительный элемент для определения ускорений и сервисная электроника (ASIC) с гибким цифровым выходом SPI. Подобная конструкция корпуса гарантирует надежную работу сенсора на протяжении всего жизненного цикла. Для обеспечения стабильного выхода акселерометры подобного класса разрабатываются, производятся и тестируются в широком диапазоне температур, влажности и механического шума. Он полностью совместим с одно- и двухосевыми акселерометрами данного типа, что дает возможность использовать датчики при построении предлагаемого в изобретении устройства.
Емкостной принцип действия датчиков обеспечивает прямое измерение смещения пробной массы, обеспечивая низкую потребляемую мощность, а симметричные структуры элементов - улучшенную стабильность нуля акселерометра, линейность и чувствительность по оси, низкую зависимость показаний от температуры (нелинейность обычно ниже 1%; чувствительность по оси обычно не превышает 3%), высокую производительность при работе в диапазоне измерений при малых g, хорошую стабильность по смещению нуля и низкое влияние шума на показания датчика.
Сенсор преобразует ускорение тела в электрический ток, заряд или напряжение. Технические характеристики емкостного трехосевого акселерометра [МЭМС-датчик ВМХ160 - очередной шаг вперед от BOSCH https: //spb.terraelectronica.ru/news/ (дата доступа 4.06.20)]:
Электропитание - 3.3 В;
Диапазон измерений -±6 g;
Разрешение АЦП 12 бит;
Встроенный температурный сенсор;
Цифровой выход SPI;
Максимальный удар 20 Кг;
Рабочая температура [-40;+125]°С;
Полоса пропускания45…50 Гц
Размер 7,7 × 8,6 × 3.3 мм.
В существующих измерительных системах для демпфирования, термокомпенсации и бароизоляции системы корпус заполняется кремний-органической жидкостью. Поскольку постоянная времени упругой системы определяется вязкостью жидкости и ее температурой, для морского гравиметра она составляет около 2 мин, что приводит к снижению точности измерений и уменьшению пространственной разрешающей способности съемки. Для устранения этого недостатка применяемых датчиков в данном изобретении предлагается использовать датчики на основе технологии микроэлектромеханики (MEMS), позволяющей создать намного меньшие, более легкие и более дешевые, чем современные образцы гравиметрических датчиков. Небольшой размер и малый вес акселерометра MEMS позволит смонтировать устройство на подводном носителе, а относительно низкая стоимость одного MEMS-устройства также сделает его практичным для развертывания нескольких акселерометров, как это предусматривает данное изобретение. Примером датчика такого типа является, например, микросхема ВМХ160 фирмы Bosch Sensortec, которая объединяют в одном корпусе 3-х осевой акселерометр, 3-х осевой гироскоп, 3-х осевой магнитометр. Это позволяет значительно снизить габариты и уменьшить энергопотребление. Более того, встроенная аппаратная библиотека программ позволяет повышать точность измерений каждого датчика за счет учета данных остальных сенсоров. Акселерометр, входящий в данную микросхему, имеет следующие технические характеристики:
- разрешение: - 0,061 mg;
- диапазоны измерений:±2,±4,±8,±16 g;
- смещение точки нуля:±40 mg;
напряжение питания: 1,71-3,6 В (VDD); 1,2-3,6 В (VDDIO);
- электропотребление: - 180 мкА,
- диапазон рабочих температур: -40…85°С;
- корпус: 14-выводный LGA размером 2,5 × 3 × 0,95 мм [МЭМС-датчик ВМХ160 - очередной шаг вперед от BOSCH https: //spb.terraelectronica.ru/news/ (дата доступа 4.06.20)].
В предлагаемой измерительной системе задействовано минимальное количество измерительных приборов и требуется минимальный объем вычислений. Демпфирование пробной массы - это частотный фильтр для подавления инерционных ускорений по амплитуде. Гиростабилизация обеспечивает измерение ускорений только в направлении, совпадающем с силой тяжести, то есть фильтрацию по направлению. В процессе создания морского гравиметрического градиентометра должна обеспечиваться долговременная стабильность параметров и его защита от воздействия электрических и магнитных полей, климатических и физических факторов. Должно обеспечиваться также метрологическое единство измерений, а процессы измерений и регистрации информации должны быть автоматизированными.
Задачей предлагаемого технического решения является повышение точности морской гравиметрической съемки.
Поставленная задача решается за счет того, что в способе морской гравиметрической съемки, включающем размещение на подвижном объекте-носителе гравиметров, создание опорных гравиметрических пунктов в районе выполнения съемки, выполнение площадной или профильной съемки путем измерения УСТ на движущемся объекте посредством измерения ускорения неподвижным относительно объекта акселерометром, и местоположения чувствительной системы гравиметра, направления и скорости перемещения носителя навигационными средствами и вычисление по полученным данным искомого абсолютного значения ускорения силы тяжести (g0), в котором в отличие от известных способов на носителе размещают измерительную систему, состоящую гравиметрического градиентометра, сконструированного по известным принципам построения градиентометрических систем, отличающихся особым расположением датчиков на носителе относительно друг друга для измерения составляющих градиента УСТ по осям ТКС для возможности по данным измерений по данным скорости и времени перемещения носителя из опорного пункта в текущую точку съемки вычисления УСТ в морских гравиметрических пунктах.
Суть изобретения заключается в том, что на подвижном носителе кроме измерительной съемочной системы размещают и баллистический гравиметр, перед началом съемки носитель аппаратуры - морской робототехнический комплекс (МРТК), например, автономный необитаемый подводный аппарат погружается на дно и производит опорные гравиметрические измерения с помощью баллистического гравиметра, в этот же период на МРТК начинают производиться измерения с помощью датчиков ГГ. После окончания опорных гравиметрических измерений МРТК всплывает над дном до глубины, на которой будет выполняться съемка. В вычислительные блоки гравиметрического градиентометра МРТК автоматически вводится опорное значение УСТ, измеренное баллистическим гравиметром на дне и МРТК, продолжая градиентометрические измерения, следует в пункт начала гравиметрической съемки. По прибытию в пункт начала гравиметрической съемки МРТК по программе покрытия района съемочными галсами (профилями) начинает перемещение по системе запланированных съемочных галсов (профилей), продолжая градиентометрические измерения. После завершения покрытия площади (или ее части) съемочными галсами МРТК направляется в опорный пункт и по прибытии в этот пункт завершает градиентометрические измерения, замыкая их на опорный пункт, погружается на дно и с помощью баллистического гравиметра производит повторные измерения баллистическим гравиметром опорного значения УСТ, Повторные измерения опорных значений УСТ сравниваются с начальными и за окончательное значение принимают среднее значения. Значения УСТ в морском гравиметрическом пункте вычисляют как суммы приращений измеренного значения к предыдущему значению, начиная с опорных значений на опорном гравиметрическом пункте. При погружении и всплытии носителя производятся градиентометрические измерения с целью получения данных для вычисления вертикального градиента УСТ для последующего приведения измеренных значений УСТ на опорном пункте на глубину, на которой производилась съемка, и вычисленных значений УСТ к среднему уровню моря.
За счет исключения необходимости введения поправки Этвеша, за счет повышения точности опорных гравиметрических измерений, исключения необходимости учета кривизны пространственной траектории носителя, измерения вертикального градиента УСТ в районе съемки для редуцирования измерений баллистического гравиметра и вычисленных значений УСТ на средний уровень моря достигается более высокая точность съемки гравитационного поля Земли.
Сущность заявляемого технического решения поясняется чертежами.
На фиг. 1. представлена структурная схема устройства для реализации заявляемого способа, а на фиг. 2 схема размещения акселерометров и ориентации их осей чувствительности на гиростабилизируемой платформе ГГ.
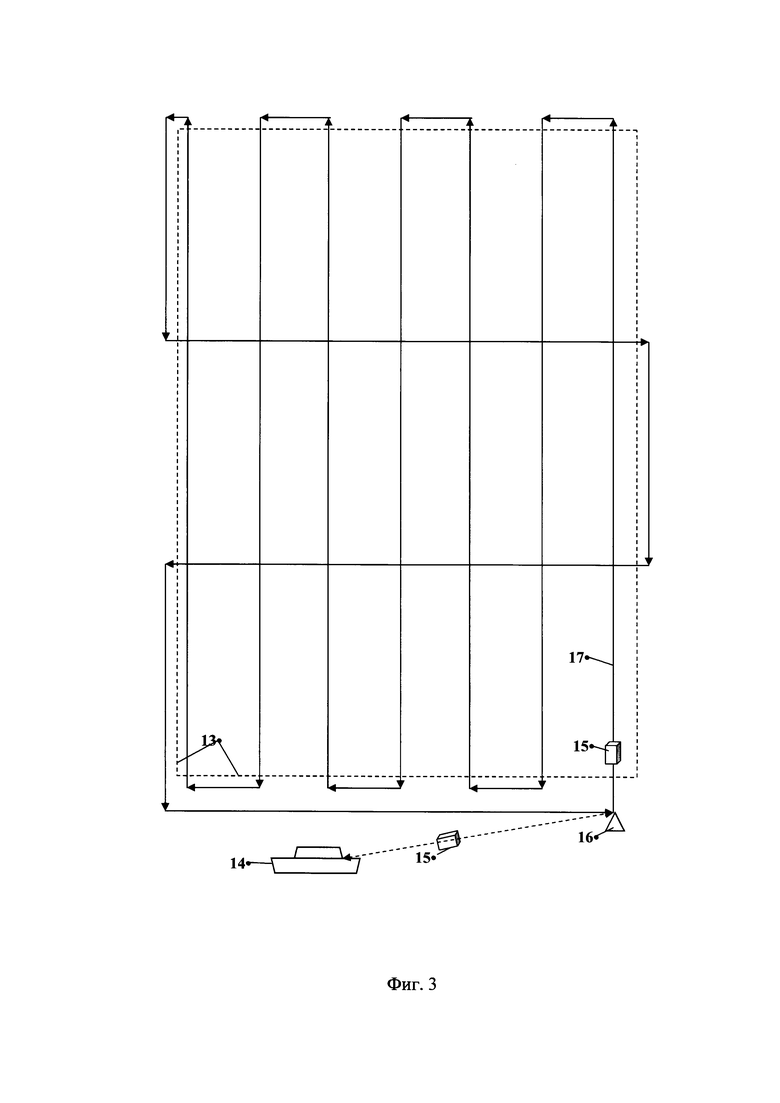
Устройство содержит гравиметрический градиентометр - 1, включающий трехосную гиростабилизированную платформу 2 с установленными на ней акселерометрами 3-8, выходы которых через электронный блок управления и питания 9 соединены с вычислительным блоком 10, который в свою очередь соединен с блоком регистрации данных 11. Вход вычислительного блока 10 соединен с навигационной системой носителя 12, а его выход соединен с блоком 11, регистрирующим данные съемки. На фиг. 3. приведена схема выполнения гравиметрической съемки предлагаемым способом. На схеме позициями обозначены: 13 - участок морской акватории для гравиметрической съемки, 14 - судно-носитель МРТК, 15 - подводный МРТК - носитель ГГ; 16 - точка на дне для выполнения опорных гравиметрических измерений, 17 -профили (галсы) перемещения МРТК при выполнении съемки.
Гиростабилизируемая платформа 2 представляет собой трехосную гироплатформу с коррекцией от акселерометров, что обеспечивает возможность выполнения измерений при возмущающих ускорениях до 150-200 Гал, с динамической погрешностью при небольших возмущающих ускорениях менее 1 мГал. При этом погрешность стабилизации не превышает 1 угловую минуту.
Вычислитель 10 может включать, например, процессор Pentium 166 МГц, ОЗУ на 32 Мбайт, плату SVGA с памятью 1 Мбайт, дополнительную плату с двумя последовательными портами с FIFO памятью (UART 16550 - совместимая). Для вычисления УСТ в вычислитель ГГ должен одновременно получать данные от различных датчиков и сохранять их. Время данных важно для коррекции измеренных данных. Часы на подводном объекте-носителе и система регистрации данных съемки синхронизируются, и метка времени добавляется к данным датчика, когда они принимаются системой регистрации. Гравиметрический градиентометр имеет электронный модуль и блок регистрации данных, содержащиеся в двух отдельных модулях, предлагаемая система может иметь только один блок с обеими функциями в одном. Электронный модуль гравиметрического градиентометра одновременно управляет датчиками, связываются с навигационной системой МРТК, управляют устройством стабилизации и градиентометром. Электронный блок 9 может иметь часы, синхронизированные с часами в МРТК с помощью функции связи, добавляет отметку времени при получении данных, распределяют электроэнергию от МРТК различным узлам градиентометра. Данные, обработки в вычислительном блоке 10, собранные электронным модулем 9, регистрируются на картах памяти блока регистрации данных 11. Устройство может иметь две SD-карты, и каждая SD-карта имеет идентичные данные в качестве резервной копии для другой. Устройство должно иметь интерфейс Ethernet, чтобы позволить получать данные с карт SD через этот интерфейс, не открывая герметичный корпус ГГ. [Development of an Underwater Gravity Measurement System with Autonomous Underwater Vehicle for Marine Mineral Exploration Ishihara, Takemi; Shinohara, Masanao; Araya, Akito; Yamada, Tomoaki; Fujimoto, Hiromi; Kanazawa, Toshihiko; Uehira, Kenji; Mochizuki, Masashi Source Journal TECHNO-OCEAN 2016: RETURN TO THE OCEANS. Source Institution Tohoku University Date Issued 2016, P.127-133 [электронный ресурс]. Режим доступа: https://ieeexplore.ieee.org/document/ (дата доступа 16.06.20)].
Определение УСТ на движущемся судне выполняется следующим образом. При движении объекта-носителя заданным курсом по управляющим электрическим сигналам, формирующимся в блоке управления 9, чувствительная система вырабатывает электрические сигналы, пропорциональные составляющим градиента, которые через электронный модуль 9 поступают в вычислитель 10.
От навигационной системы 12 объекта-носителя сигналы, пропорциональные составляющим абсолютной скорости, поступают в вычислительный блок 10 от навигационной системы 12 поступают также данные о направлении перемещения объекта в ТКС и данные о времени с момента начала движения от пункта опорных гравиметрических измерений.
Гравиметрическую съемку выполняют по замкнутым маршрутам с замыканием на опорный гравиметрический пункт, а искомые значения УСТ в точке в морских гравиметрических пунктах вычисляют как суммы приращений произведений составляющих градиента УСТ и составляющих пройденного пути по осям топоцентрической координатной системы к предыдущему значению, начиная со значения, измеренного на опорном гравиметрическом пункте.
Искомые значения УСТ g на морских гравиметрических пунктах, расположенных вдоль съемочного галса, вычисляются по формуле (8).
Анализ формулы (8) показывает, что, если принять гипотезу, что слагаемые под знаком сумм в правых частях не отягощены постоянными систематическими составляющими погрешностей, поскольку в приращениях данные погрешности практически исключаются, а случайные погрешности малы по величине и имеют разные знаки, то при большом количестве измерений между опорными пунктами, случайные погрешности приращения под суммами будут стремиться к нулю. Следовательно, погрешность определения УСТ будет определяться в основном погрешностями их измерения на опорном гравиметрическом пункте.
Координаты опорных гравиметрических пунктов для навигационного обеспечения съемки определяются, известными способами, например, с использованием гидроакустических навигационных систем средств судна-носителя МРТК, при нахождения МРТК в опорном пункте на дне путем измерения направлений и расстояния до пингера или маяка-ответчика на корпусе МРТК и последующей передачи измеренных координат по каналу связи в навигационную систему объекта-носителя. Координаты судна-носителя определяются известными средствами и способами, например, с использованием глобальных навигационных спутниковых систем. Определение пройденного МРТК пути по осям координат ТКС при выполнении съемки осуществляется известными способами, например, навигации с использованием его инерциальной навигационной системы.
При большой площади съемки количество опорных гравиметрических пунктов может быть создано больше одного в различных местах района съемки. Съемку района осуществляют на параллельных галсах и контролируют ее секущими галсами. Обработка данных съемки включает: вычисление УСТ и координат морских гравиметрических пунктов, оценку точности измерений, вычисление аномалий Δg=g - g0, где g -измеренное значение силы тяжести на морском пункте, g0 - вычисленное нормальное значение УСТ.
Способ морской гравиметрической съемки, включает создание опорного гравиметрического пункта на дне: путем определения координат объекта-носителя на дне, выполнения опорных гравиметрических измерений выполнение площадной или профильной съемки, путем измерения составляющих тензора градиента УСТ на движущемся объекте-носителе измерительной аппаратуры, посредством измерения ускорения особо расположенными на гиростабилизируемой платформе акселерометрами, одновременного измерения составляющих скорости объекта носителя по осям топоцентрической координатной системы, а также измерения курса и объекта-носителя и вычисление по полученным данным искомого значения УСТ.
В отличие от известных способов гравиметрической съемки в заявляемом способе размещение опорного пункта (пунктов) непосредственно на морском дне позволяет достичь высокой точности опорных гравиметрических измерений в морских условиях, обеспечивая возможность использования баллистического гравиметра.
Реализация заявляемого способа технической трудности не представляет, так как реализуется посредством технических средств измерения, имеющих промышленное применение при разработке геофизических и навигационных измерительных приборов.
Таким образом, отличительные признаки предложенного технического решения, а именно - выполнение непосредственно в районе съемки или в непосредственной близости от нее опорных абсолютных гравиметрических измерений на дне и приведение их результатов на глубину или уровень съемки по данным измерения вертикального градиента ускорения силы тяжести, измеряемого при всплытии носителя со дна на глубину выполнения съемки и градиентометрические измерения на съемочных галсах составляющих градиента ускорения силы тяжести особо размещенными на гиростабилизируемой платформе акселерометров по направлению осей топоцентрической координатной системы и ориентацией их осей чувствительности по направлению оси аппликат этой системы, вычисления значений ускорения силы тяжести в морских гравиметрических пунктах как суммы произведения составляющих градиента ускорения силы тяжести и составляющих пути носителя по осям этой же координатной системы и редуцирования данных вычисления на средний уровень моря по данным измерения вертикального градиента ускорения силы тяжести, измеряемого при всплытии носителя на поверхность обеспечивают заявленный положительный эффект - повышение точности съемки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2010 |
|
RU2426154C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324207C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550161C1 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575316C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2010 |
|
RU2479859C2 |
| АВТОНОМНЫЙ ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВОДНОГО ОБЪЕКТА В ПОДВОДНОМ ПОЛОЖЕНИИ | 2009 |
|
RU2399025C1 |
| Способ измерения гравитационного поля Земли | 2020 |
|
RU2737034C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
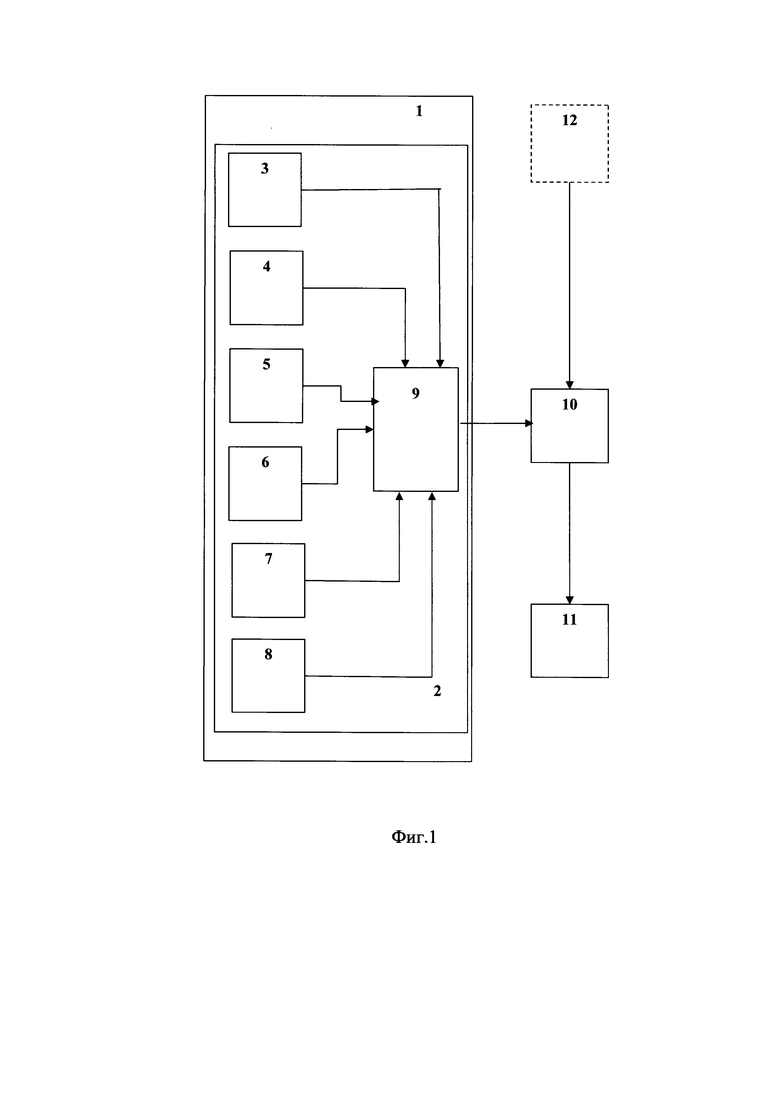
Группа изобретений относится к области морской гравиметрической съемки. Сущность: гравиметрическими датчиками, размещенными на подвижном носителе, измеряют параметры гравитационного поля Земли при перемещении подвижного носителя по системе профилей, покрывающих площадь съемки. Определяют положение носителя в момент измерения с использованием его инерциальной навигационной системы или гидроакустических навигационных систем. Развертывают в районе съемки один или несколько опорных гравиметрических пунктов. Определяют координаты гравиметрических пунктов и выполняют на них опорные измерения ускорений силы тяжести (УСТ). Причем опорные измерения УСТ выполняют посредством носителя, погружаемого на дно, перед съемкой или по ее завершении. Для редуцирования результата на горизонт съемки и на средний уровень моря при погружении на дно и при всплытии измеряют градиентометром вертикальный градиент УСТ. Для съемки пространственного распределения УСТ на носителе при его движении измеряют составляющие градиента УСТ по осям топоцентрической координатной системы. Одновременно с помощью навигационной системы носителя измеряют расстояния, пройденные носителем по этим осям, начиная с опорного пункта до завершения съемки на исходном опорном пункте. Используя результаты измерений, вычисляют значения УСТ в морских гравиметрических пунктах. Устройство для реализации способа включает гравиметрические датчики (3-8), гидростабилизируемую платформу (2) для воспроизведения топоцентрической координатной системы, электронный блок (9) питания и управления гравиметрическими датчиками, вычислительный блок (10) для обработки измерений и блок (11) регистрации данных обработки измерений. Причем в качестве гравиметрических датчиков (3-8) используют акселерометры, попарно устанавливаемые на гидростабилизируемой по осям воспроизводимой топоцентрической координатной системы платформе (2), симметрично и на строго фиксированном расстоянии относительно её начала. Выходы акселерометров (3-8) попарно соединены с электронным блоком (9) питания и управления с возможностью передачи ему генерируемых сигналов смещения пробных масс для преобразования их в сигналы ускорения. Выходы электронного блока (9) питания и управления соединены с вычислительным устройством (10) для последующего вычисления составляющих градиента УСТ по сигналам попарно измеренных ускорений и значения УСТ в морских гравиметрических пунктах. Технический результат - повышение точности морской гравиметрической съемки. 2 н.п. ф-лы, 3 ил.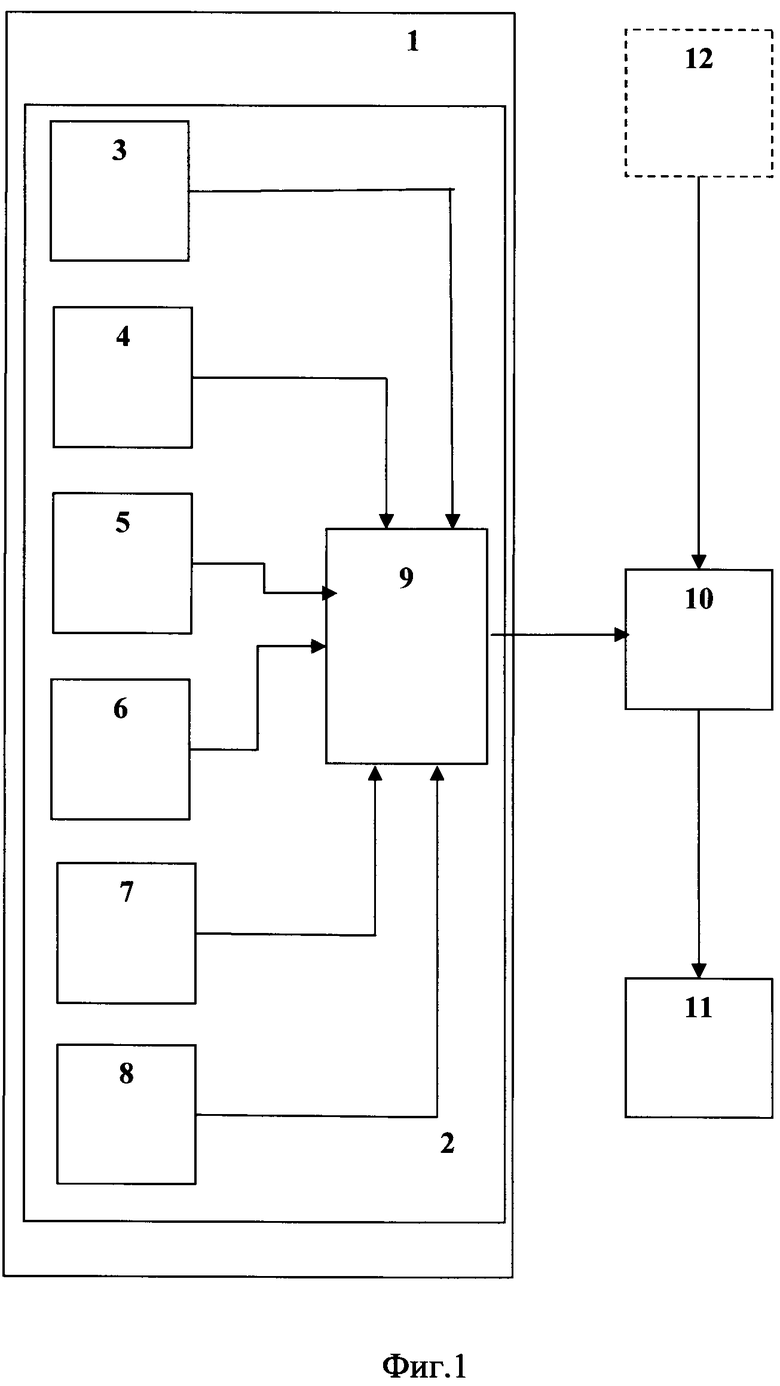
1. Способ морской гравиметрической съемки, включающий размещение на подвижном носителе гравиметрических датчиков, измерение ими параметров гравитационного поля Земли при перемещении подвижного носителя по системе профилей, покрывающих площадь съемки, определение положения носителя в момент измерения с использованием его инерциальной навигационной системы или гидроакустических навигационных систем, развертывание в районе съемки одного или нескольких опорных гравиметрических пунктов, определение их координат и выполнение на них опорных измерений ускорения силы тяжести (УСТ), отличающийся тем, что опорные измерения УСТ выполняют посредством носителя, погружаемого на дно, перед съемкой или по ее завершении, для редуцирования результата на горизонт съемки и на средний уровень моря при погружении на дно и при всплытии измеряют градиентометром вертикальный градиент УСТ, для съемки пространственного распределения УСТ на носителе при его движении измеряют составляющие градиента УСТ по осям топоцентрической координатной системы и одновременно с помощью навигационной системы носителя измеряют расстояния, пройденные носителем по этим осям, начиная с опорного пункта до завершения съемки на исходном опорном пункте, значения УСТ в морских гравиметрических пунктах вычисляют по формуле 
где

К - количество измерений градиентометром вертикального градиента при всплытии носителя со дна на глубину выполнения съемки,
k = 1, 2…К – номер градиентометрического измерения при всплытии носителя со дна на глубину выполнения съемки,

h - высота носителя над дном, достигаемая им при всплытии со дна на глубину выполнения съемки,
i = 1, 2…n – номер градиентометрического измерения на съемочном профиле,






j = 1, 2…m – номер градиентометрического измерения при всплытии или погружении носителя,

z – глубина, на которой производилась съемка,

2. Устройство для реализации способа по п.1, включающее гравиметрические датчики, гидростабилизируемую платформу для воспроизведения топоцентрической координатной системы, электронный блок питания и управления гравиметрическими датчиками, вычислительный блок для обработки измерений и блок регистрации данных обработки измерений, отличающееся тем, что в качестве гравиметрических датчиков используют акселерометры, попарно устанавливаемые на гидростабилизируемой по осям воспроизводимой топоцентрической координатной системы платформе, симметрично и на строго фиксированном расстоянии относительно её начала, выходы акселерометров попарно соединены с электронным блоком питания и управления с возможностью передачи ему генерируемых сигналов смещения пробных масс для преобразования их в сигналы ускорения, выходы электронного блока питания и управления соединены с вычислительным устройством для последующего вычисления составляющих градиента УСТ по сигналам попарно измеренных ускорений и значения УСТ в морских гравиметрических пунктах.
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324207C1 |
| CN 104656158 A, 27.05.2015. | |||

