Изобретение относится к электротехнике и может быть использовано в линейном прецизионном электроприводе.
Известен линейный индукторный двигатель [1] содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг. Фазные электромагнитные модули смещены относительно друг друга вдоль направления движения на (n±1/4)τ а П-образные магнитопроводы в каждом электромагнитном модуле на n τ, где τ -шаг зубцовой зоны двигателя; n целое число.
При запитке обмоток управления линейного индуктора двигателя синусоидальным и косинусоидальным токами равной амплитуды представляется возможным управлять силой тяги двигателя путем регулирования амплитуды фазных токов.
Известный двигатель характеризуется тем, что каждый электромагнитный модуль создает тяговое усилие, состоящее из полезной и паразитной составляющих. Полезные составляющие тяговых усилий электромагнитных модулей, суммируясь, создают основную составляющую силы тяги двигателя, пропорциональную амплитуде фазных токов. Паразитные составляющие тяговых усилий электромагнитных модулей, суммируясь, создают паразитную составляющую силы тяги двигателя, амплитуда которой пропорциональна квадрату амплитуды токов управления.
Кроме того, известный двигатель характеризуется тем, что каждый электромагнитный модуль создает дополнительную паразитную составляющую тягового усилия, так называемую силу магнитной фиксации. Эта паразитная составляющая тягового усилия обусловлена не алгоритмом управления двигателем, а его конструктивными особенностями. Она зависит от формы зубцовой зоны, от стабильности магнитного потока возбуждения и т.п. Дополнительные паразитные составляющие тяговых усилий электромагнитных модулей, суммируясь, создают дополнительную паразитную составляющую силы тяги двигателя.
Недостатком известного двигателя является невысокая точность управления его силой тяги, обусловленная возникновением паразитных составляющих силы тяги.
Наиболее близким к предлагаемому является линейный индукторный двигатель [2] содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из трех электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг, первый электромагнитный модуль смещен относительно второго вдоль направления движения на (n+1/3) τ, а третий относительно второго на +(n+1/3) τ, в каждом электромагнитном модуле П-образные магнитопроводы смещены относительно друг друга вдоль направления движения на nτ.
Этот двигатель обладает более высокой точностью управления силой тяги, так как паразитные составляющие тяговых усилий электромагнитных модулей, связанные с алгоритмом управления силой тяги, создают две системы взаимно компенсирующихся тяговых усилий. Дополнительная паразитная составляющая силы тяги двигателя имеет место.
Недостатком известного двигателя является относительно невысокая точность управления его силой тяги, обусловленная наличием дополнительной паразитной составляющей силы тяги.
Изобретение направлено на повышение точности управления силой тяги путем уменьшения дополнительной паразитной составляющей силы тяги.
Решение поставленной задачи достигается тем, что в линейном индукторном двигателе, содержащем ферромагнитный зубчатый статор и подвижный элемент, состоящий из трех электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг, первый электромагнитный модуль смещен относительно второго вдоль направления движения на -(n+1/3) τ, а третий относительно второго на +(n+1/3) τ, в каждом электромагнитном модуле выполнено смещение П-образных магнитопроводов относительно друг друга вдоль направления движения на (n±1/6) τ.
Промышленное применение изобретения в линейном прецизионном электроприводе за счет повышения точности управления силой тяги линейного двигателя позволяет улучшить точностные характеристики электропривода.
На чертеже представлена схема линейного индукторного двигателя.
Двигатель содержит ферромагнитный зубчатый статор 1 и подвижные элемент 2, состоящий из электромагнитных модулей 3, 4, 5. Каждый модуль включает в себя П-образные магнитопроводы 6, 7, обмотку 8 управления и постоянный магнит 9 возбуждения. Зубцовые зоны статора 1 и подвижного элемента 2 имеют одинаковый шаг τ. Электромагнитные модули 3 и 4, 5 и 4 взаимно смещены вдоль направления движения на ± (n+1/3) τ, а П-образные магнитопроводы в каждом электромагнитном модуле на (n-1/6) τ
Двигатель работает следующим образом.
Обмотки 8 управления электромагнитных модулей 3, 4, 5 запитываются синусоидальными токами
i1= i0sin

 ; i2= i0sin
; i2= i0sin
 ; i3= i0sin
; i3= i0sin
 +
+  (1)
(1)
где ϕ  x угол, определяющий положение подвижного элемента 2 двигателя относительно статора 1;
x угол, определяющий положение подвижного элемента 2 двигателя относительно статора 1;
ϕo=  угол, определяющий взаимное смещение П-образных магнитопроводов 6, 7 в электромагнитном модуле;
угол, определяющий взаимное смещение П-образных магнитопроводов 6, 7 в электромагнитном модуле;
х положение подвижного элемента 2 двигателя вдоль направления движения;
iо амплитуда токов управления.
Сила тяги регулируется путем изменения амплитуды токов управления.
Определим силу тяги, развиваемую двигателем, воспользовавшись известной методикой расчета электромагнитных модулей.
Тяговое усилие, создаваемое электромагнитным модулем, представляется как сумма усилий, создаваемых его полюсами. Эти составляющие тягового усилия модуля определяются из расчета его эквивалентной схемы замещения.
Получим, что тяговое усилие, создаваемое электромагнитным модулем 4, равно = fosin
= fosin
 + f
+ f sin
sin 2ϕ-
2ϕ- -
-  sin
sin 4ϕ-2
4ϕ-2 (2) где
(2) где
fo=  WioFmλmcos
WioFmλmcos  f1=
f1=  (Wio)2
(Wio)2
K1 go + λm + λσ K2 2go + λ m + λσ K3 λm + λσ
λm, λσ, Fm внутренняя магнитная проводимость, проводимость рассеяния, МДС постоянного магнита 9 соответственно;
go и g1 постоянная составляющая и амплитуда изменения магнитной проводимости зазора;
W число витков обмотки 8 управления.
Учитывая, что электромагнитные модули 3, 5 смещены относительно модуля 4 вдоль направления движения на -(n+1/3) τ и на +(n+1/3)τ а токи управления i1, i3 смещены относительно тока i2 по фазе на углы  +
+  соответственно, тяговые усилия, создаваемые модулями 3, 5, определим из выражения (2) путем замены аргумента ϕ на ϕ -
соответственно, тяговые усилия, создаваемые модулями 3, 5, определим из выражения (2) путем замены аргумента ϕ на ϕ - и на ϕ +
и на ϕ + соответственно.
соответственно.
После простых преобразований с учетом того, что ϕo получим
получим = fosin
= fosin
 + f
+ f sin
sin 2ϕ
2ϕ 
 sin
sin  4ϕ
4ϕ  ;
; = fosin
= fosin
 + f
+ f sin
sin 2ϕ +
2ϕ + 
 sin
sin  4ϕ +
4ϕ +  ;
; = fosin
= fosin +
+  + f
+ f sin
sin 2ϕ +
2ϕ + 
 sin 4ϕ
sin 4ϕ  .
.
Создаваемая двигателем сила тяги равна
 +
+ +
+ =
=  fo.
fo.
Она не содержит паразитной составляющей, поскольку паразитные составляющие тяговых усилий электромагнитных модулей создают две системы взаимно компенсирующихся тяговых усилий.
Теперь оценим возникающую дополнительную паразитную составляющую силы тяги. Воспользуемся следующей методикой расчета.
Дополнительную паразитную составляющую силы тяги определим как сумму паразитных тяговых усилий, создаваемых всеми П-образными магнитопроводами подвижного элемента двигателя,т.е.

 (ϕ).
(ϕ).
Примем, что паразитные тяговые усилия, создаваемые П-образными магнитопроводами, совпадают по форме, но смещены друг относительно друга вдоль направления движения, т.е.
Ψj(ϕ) Ψ(ϕ-(j-1) ), j 1,2,6, где Ψ(ϕ) паразитное тяговое усилие, создаваемое П-образным магнитопроводом 6 электромагнитного модуля 4.
), j 1,2,6, где Ψ(ϕ) паразитное тяговое усилие, создаваемое П-образным магнитопроводом 6 электромагнитного модуля 4.
Представим паразитное тяговое усилие Ψ(ϕ) в виде ряда Фурье, т.е.
Ψ(ϕ) sin(iϕ+ϕi), где Ψi и ϕi амплитуда и начальное смещение i=й гармоники.
sin(iϕ+ϕi), где Ψi и ϕi амплитуда и начальное смещение i=й гармоники.
Получим, что дополнительная паразитная составляющая силы тяги равна

 sin (iϕ +i(j-1)
sin (iϕ +i(j-1)  + ϕi).
+ ϕi).
Из анализа полученного результата следует, что дополнительная паразитная составляющая силы тяги может содержать только гармоники i=6,12,18, Остальные гармоники
i γ+ 6n, n 0,1,2, γ 1,2,3,4,5 отсутствуют, так как составляющие этих гармоник взаимно компенсируют друг друга.
Аналогично оценим дополнительную паразитную составляющую силы тяги, создаваемую известным двигателем. Получим, что

 sin (iϕ +i(j-1)
sin (iϕ +i(j-1)  + ϕi).
+ ϕi).
В данном случае взаимно компенсируются только составляющие гармоник
i γ+ 3n, n 0,1,2, γ 1,2.
Дополнительная паразитная составляющая силы тяги известного двигателя может содержать гармоники
i 3,6,9,12,15,18,
Из полученных результатов следует, что предлагаемое взаимное смещение П-образных магнитопроводов в каждом электромагнитном модуле обеспечивает взаимную компенсацию составляющих гармоник i3,9,15, что непосредственно подтверждает преимущество предлагаемого двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный индукторный двигатель | 1990 |
|
SU1778882A1 |
| Линейный индукторный электродвигатель | 1990 |
|
SU1778883A1 |
| Линейный двухфазный индукторный двигатель | 1990 |
|
SU1760609A1 |
| Линейный индукторный двигатель | 1988 |
|
SU1629950A1 |
| Способ частотно-токового управления двухфазным синхронным двигателем | 1990 |
|
SU1758824A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ РАЗДВИЖНЫХ ВОРОТ | 1992 |
|
RU2054112C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1991 |
|
RU2030066C1 |
| БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2285322C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2648660C1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
Использование: в линейном прецизионном электроприводе. В устройстве, содержащем ферромагнитный зубчатый статор 1 и подвижный элемент 2, состоящий из фазных электромагнитных модулей, включающих в себя П-образные магнитопроводы 6,7, обмотки 8 управления и постоянные магниты 9 возбуждения, причем зубцовые зоны статора 1 и подвижного элемента 2 имеют одинаковый шаг τ, подвижный элемент 2 выполнен из трех электромагнитных модулей 3, 4, 5, первый модуль 3 смещен относительно второго 4 вдоль направления движения на (n+1/3)τ, а третий 5 относительно второго 4 на + (n+1/3)τ, П-образные магнитопроводы 6, 7 в каждом модуле смещены относительно друг друга вдоль направления движения на (n+1/6)τ. Применение изобретения за счет повышения точности управления силой тяги линейного двигателя обеспечивает улучшение точностных характеристик электропривода. 1 ил.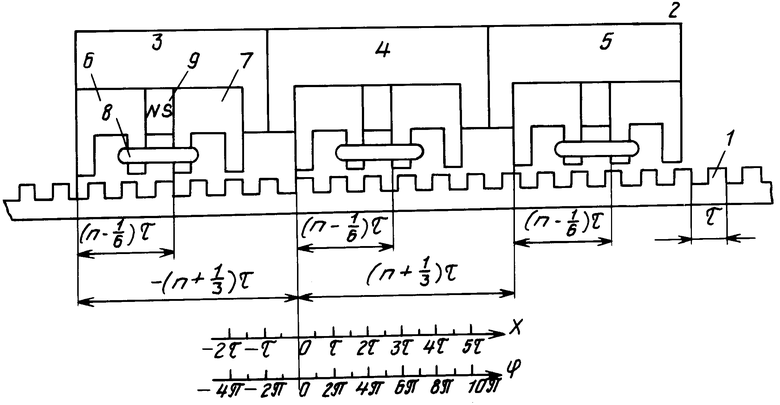
ЛИНЕЙНЫЙ ИНДУКТОРНЫЙ ДВИГАТЕЛЬ, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из трех электромагнитных модулей, включающих в себя П-образные магнитопроводы, обмотки управления и постоянные магниты возбуждения, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг, первый электромагнитный модуль смещен относительно второго вдоль направления движения на +(n+1/3)τ, а третий относительно второго на -(n+1/3)τ, отличающийся тем, что в каждом электромагнитном модуле выполнено смещение П-образных магнитопроводов относительно друг друга вдоль направления движения на (n ± 1/6)·τ, где τ шаг зубцовой зоны двигателя, n целое число.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный индукторный электродвигатель | 1990 |
|
SU1778883A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
