Изобретение относится к электротехнике и может быть использовано в линейном прецизионном электроприводе.
Известен линейный двухфазный индукторный двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из четырех электромагнитных модулей, каждый из которых включает в себя два П-образных магнитопровода, обмотку управления и постоянный магнит, причем зубцовые зоны статора и подвижного элемента имеют одинаковый шаг г , Электромагнитные модули разных фаз, а также электромагнитные модули, принадлежащие одной фазе, смещены относительно друг друга вдоль направления движения на (п + 1/4) г , еде п - любое целое число. П-образные магнитопроводы в каждом электромагнитном модуле взаимно смещены на целое число шагов г .
При запитке обмотокуправления линейного двигателя синусоидальным и косинусо- идальным токами равной амплитуды возникает сила тяги, пропорциональная амплитуде токов.
Недостатком известного устройства является относительно невысокая удельная сила тяги, обусловленная частичной взаимной компенсацией тяговых усилий, создаваемых электромагнитными модулями
Наиболее близким к предлагаемому техническому решению является линейный двухфазный индукторный двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из четырех электромагнитных модулей каждый из которых включает в себя два П-образных магнитопровода обмотку упрчления и постоянный магнит, причем, з биовые зоны статора и подвижного элемента имеют одинаковый шаг г . Электромагнитные модули разных фаз смещены относи г .ьно друг
(Л
С
друга вдоль направления движения на (п + 1 /4) г , где п - любое целое число Электромагнитные модули, принадлежащие одной фазе, а также П-образные магнитопроводы в каждом электромагнитном модуле взаимно смеа(ены на целое число шагов г .
Линейный индукторный двигатель обладает достаточно высокой удельной силой тяги, однако характеризуется тем, что при обесточенных обмотках управления постоянные магниты электромагнитных модулей порождают знакопеременную паразитную силу тяги.
Недостатком известного устройства является невысокая точность регулирования силы тяги, обусловленная наличием значительной паразитной силы тяги.
Целью изобретения является повышение точности регулирования силы тяги за счет уменьшения паразитной силы гяги
Поставленная цель достигается тем, что в известном линейном двухфазном индукторном двигателе, содержащем ферромагнитный зубчатый статор и подвижный элемент, состоящий из четырех электромагнитных модулей, каждый из которых включает в себя два П-образных магнитопровода, обмотку управления и постоянный магнит, причем, зубцо- вые зоны статора и подвижного элемента имеют одинаковый шаг г , а электромагнитные модули разных фаз смещены относительно друг друга вдоль направления движения на (л i- 1/4) i . выполнено смещение П-образных магнитопроводоз в каждом электромагнитном модуле друг относительно друга вдоль направления движения на(п + 1/8) т , а электромагнитных модулей, принадлежащих одной фазе, - на (п + 1 /2) т , где п - любое целое число.
На чертеже представлена схема линейного двухфазного индукторного двигателя
Двигатель содержит ферромагнитный зубчатый статор 1 и подвижный элемент, состоящий из электромагнитных модулей 2, 3, 4 и 5. Каждый модуль включает в себя П-образные магнитопроводы 6 и 7, обмотку 8 управления и постоянный магнит 9 возбуждения. Зубцовые зоны статора 1 и подвижного элемента имеют одинаковый шаг . Электромагнитные модули 2 и 4, 3 и 5, принадлежащие одной фазе, смешены относительно друг друга вдоль направления движения на (п + 1 /2) г . Электромагнитные модули 2 и 3, 4 и 5, принадлежащие разным фазам, - на (п + 1/4) т .В каждом электромагнитном модуле П-образные магнитопроводы 6 и 7 взаимно смещены на (п-1 /8) т, где п - любое целое число
Линейный двухфазный индукторный двигатель работает следующим образом.
Управление двигателем осуществляется путем запитки его обмоток синусоидаль- ным и косинусоидальным токами равной амплитуды
д 10 sin ((р - д ). В I0 cos (р - ),
10
где (р2л
х - угол, определяющий поло5
0
5
0
жение подвижного элемента двигателя относительно статора 1,
х - линейное положение подвижного элемента,
т - шаг зубцовых зон двигателя.
to амплитуда токов.
Токи управления д и Q формируются в соответствии с информацией о положении подвижного элемента в каждый момент времени Сила тяги регулируется с помощью амплитуды токов управления
Определим силу тяги, развиваемую двигателем.
Воспользуемся известной методикой расчета электромагнитных модулей, в соответствии с которой тяговое усилие модуля определяется как сумма усилий, развиваемых его полюсами Эти составляющие тягО- вого усилия определяются из схемы замещения электромагнитного модуля
Получим, что электромагнитные модули 2 и 3 будут развивать тяговые усилия
А (Г)}
40
(0-707 K2-K.OFox(s,n ()-icos j
/;
гдек1 д0 +Am + Ар К2-2д0+ А™ + A/j . кз + + Am + АО,
Am и Ас; - внутренняя Mai нитная проводимость и проводимость рассеяния постоянного магнита,
Fm - МДС постоянного магнита, д0 и gi - постоянная составляющая и амплитуда изменения магнитной проводимости зазора между статором и полюсом модуля,
W - число витков обмотки управления. Поскольку тяговое усилие, развиваемое электромагнитным модулем 4 равно тяговому усилию модуля 2, а тяговое усилие, развиваемое модулем 5, равно т яговомуусилию модуля 3, то сила тяги линейного двигателя, равная сумме тяговых усилий всех электромагнитных модулей, будет павной
9i
9i
F 2 Fo ( 0,924 Fm Am - у Fo cos 4 p }
где
0.707 Kg - К. 0.7Q7 -0.293 2g02g0
Теперь оценим возникающую паразитную силу тяги.
Воспользуемая следующей методикой расчета.
Определим паразитную силу тяги AF как сумму паразитных тяговых усилий, создаваемых всеми П-образными магнито- проводами подвижного элемента двигателя, т.е.
,(Ґ).
J i Примем П-образный магнитопровод 6
электромагнитного модуля 2 в качестве базового, т.е.
fi(( Р)
Представим паразитное тяговое усилие базового П-образного магнитопровода в виде ряда Фурье т.е. оо
f ( fl Sin ().
где fi и (р - амплитуда и начальное смещение i-ой гармоники.
Примем, что паразитные тяговые усилия П-образных магнитопроводов совпадают по форме, но смещены друг относительно друга на соответствующие углы, т.е.
f|(P)f(p + fl-1)J).
Получим, что паразитная сила тяги будет равной
„f 27sin(iy + ijf + /) 1 1
Из анализа полученного результата следует, что паразитная сила тяги Л F может содержать только гармоники, ,16... Остальные гармоники,
1 (2п+1); }М,2,4; ,1,2
исключаются из-за взаимной компенсации их каждых восьми слагаемых.
Аналогичным образом определим силу тяги, развиваемую известным линейным двигателем, и возникающую при этом паразитную силу тяги.
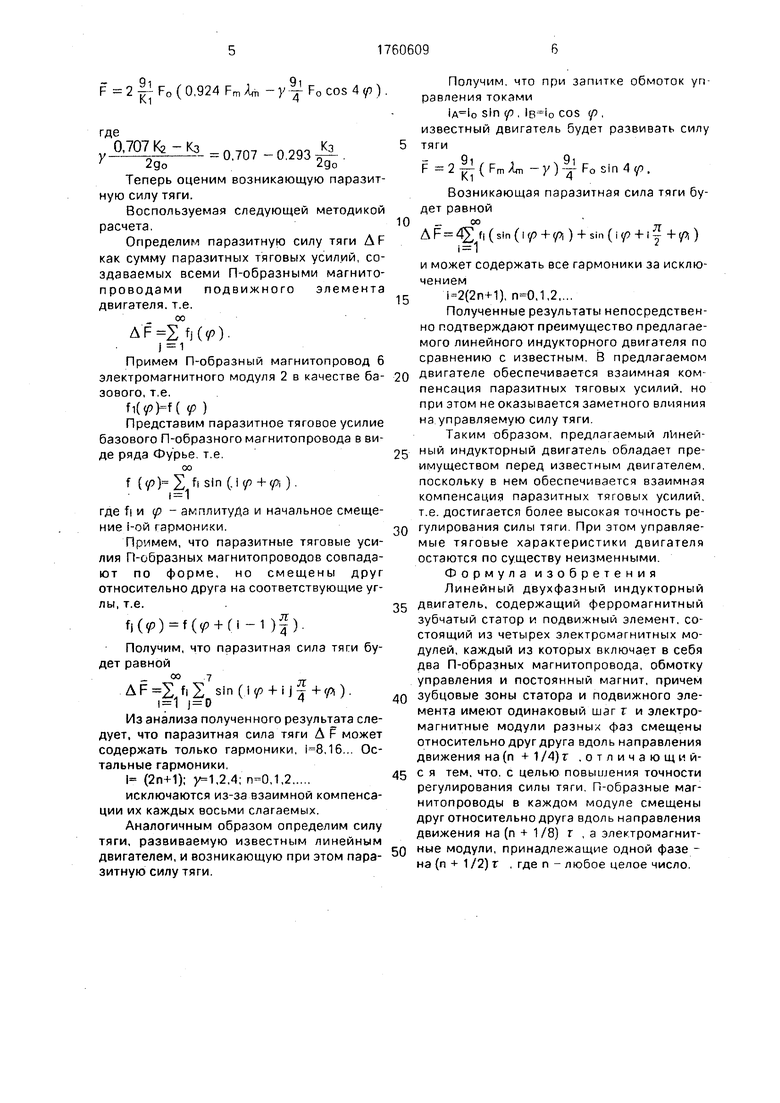
Получим, что при запитке обмоток управления токами
sin (f), cos p , известный двигатель будет развивать силу тяги
9i
9i
F 2(FmAi, -y)F0sin4,
Возникающая паразитная сила тяги будет равной
-0°
Л F 4Ј г, (sin (i у + /}) + sin (i p +1 у + ул)
и может содержать все гармоники за исключением
2(2пН). .1,2....
Полученные результаты непосредственно подтверждают преимущество предлагаемого линейного индукторного двигателя по сравнению с известным. В предлагаемом
двигателе обеспечивается взаимная компенсация паразитных тяговых усилий, но при этом не оказывается заметного влияния на управляемую силу тяги.
Таким образом, предлагаемый линейный индукторный двигатель обладает преимуществом перед известным двигателем, поскольку в нем обеспечивается взаимная компенсация паразитных тяговых усилий, т.е. достигается более высокая точность регулирования силы тяги При этом управляемые тяговые характеристики двигателя остаются по существу неизменными. Формула изобретения Линейный двухфазный индукторный
двигатель, содержащий ферромагнитный зубчатый статор и подвижный элемент, состоящий из четырех электромагнитных модулей, каждый из которых включает в себя два П-образных магнитопровода, обмотку управления и постоянный магнит, причем
зубцовые зоны статора и подвижного элемента имеют одинаковый шаг г и электромагнитные модули разных фаз смещены относительно друг друга вдоль направления движения на (п +1/4)4 .отличающийс я тем, что, с целью повышения точности регулирования силы тяги, П-образные маг- нитопроводы в каждом модуле смещены друг относительно друга вдоль направления движения на (п + 1/8) г , а электромагнитные модули, принадлежащие одной фазе - на {п + 1 /2) т . где п - любое целое число.
2я т ffTr 8тт У

| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный индукторный двигатель | 1990 |
|
SU1778882A1 |
| Линейный индукторный двигатель | 1988 |
|
SU1629950A1 |
| Линейный индукторный электродвигатель | 1990 |
|
SU1778883A1 |
| ЛИНЕЙНЫЙ ИНДУКТОРНЫЙ ДВИГАТЕЛЬ | 1992 |
|
RU2046525C1 |
| Способ частотно-токового управления двухфазным синхронным двигателем | 1990 |
|
SU1758824A1 |
| Линейный электрический двигатель | 1981 |
|
SU1128343A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366066C1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 1994 |
|
RU2079951C1 |
| Линейный синхронный электродвигатель | 1985 |
|
SU1350779A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ РЕАКТИВНАЯ МАШИНА | 2021 |
|
RU2780383C1 |

Использование: в линейном прецизионном электроприводе. Сущность изобретения: подвижный элемент, двигатель которого состоит из электромагнитных модулей 2-5, каждый из которых включает в себя П-образные магнитопроводы 6 и 7, обмотку управления 8 и постоянный магнит возбуждения 9, П-образные магнитопроводы 6 и 7 в каждом электромагнитном модуле смещены на (п + 1/8) г , а электромагнитные модули 2 и 4, 3 и 5, принадлежащие одной фазе - на (п +1 /2) т , где п - любое целое число, г - зубцовый шаг зубцовых зон статора и подвижного элемента. Такой сдвиг обеспечивает взаимную компенсацию слагаемых инструментальной паразитной силы тяги, что ведет к повыше- ниюточности регулирования силы тяги 1 ил
| Многоканальная система электропитания | 1988 |
|
SU1629905A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
