Изобретение относится к электротехнике и может быть использовано в инверторах напряжения, предназначенных для частотно-регулируемого электропривода.
Наиболее близким по технической сущности к изобретению является способ управления инвертором напряжения, состоящий в том, что формируют сигнал задания и сигнал, пропорциональный мгновенным значениям тока нагрузки, формируют сигнал ошибки путем сравнения сигнала задания и сигнала, пропорционального мгновенным значениям тока нагрузки, определяют знак сигнала ошибки, формируют тактовые импульсы стабильной частоты, запоминают знак сигнала ошибки в моменты формирования тактовых импульсов, сравнивают его со знаком сигнала ошибки в момент формирования предыдущего тактового импульса, формируют сигналы переключения вентилей инвертора при изменении знака сигнала ошибки.
Недостатком известного способа является возможность возникновения сквозных токов в плечах инвертора напряжения.
Изобретение направлено на повышение надежности путем исключения протекания сквозных токов в плечах инвертора напряжения.
Решение поставленной задачи достигается тем, что согласно известному способу управления инвертором напряжения, по которому формируют сигнал задания и сигнал, пропорциональный мгновенным значениям тока нагрузки, формируют сигнал ошибки путем сpавнения сигнала задания и сигнала, пропорционального мгновенным значениям тока нагрузки, определяют знак сигнала ошибки, формируют тактовые импульсы стабильной частоты, запоминают знак сигнала ошибки в моменты формирования тактовых импульсов, сравнивают его со знаком сигнала ошибки в момент формирования предыдущего тактового импульса, формируют сигналы переключения вентилей инвертора при изменении знака сигнала ошибки, при формировании сигналов переключения вентилей инвертора его замкнутые вентили размыкают передним фронтом тактовых импульсов, разомкнутые вентили инвертора замыкают задним фронтом тактовых импульсов, а длительность тактовых импульсов принимают равно τ≥τo, где τo длительность размыкания замкнутого вентиля.
Сопоставительный анализ с прототипом показывает, что заявляемый способ отличается тем, что при формировании сигналов переключения вентилей инвертора его замкнутые вентили размыкают передним фронтом тактовых импульсов, разомкнутые вентили инвертора замыкают задним фронтом тактовых импульсов, а длительность тактовых импульсов принимают равной τ≥τo. Это позволяет сделать вывод о соответствии заявляемого технического решения критерию "новизна".
Поскольку указанные отличия позволяют решить задачу повышения надежности путем исключения протекания сквозных токов в плечах инвертора, а при изучении других технических решений в данной области техники не выявлены признаки, отличающие заявляемое решение от прототипа, это дает возможность утверждать, что заявляемое техническое решение соответствует критерию "изобретательский уровень".
Предлагаемый способ управления инвертором заключается в том, что формируют сигнал задания и сигнал, пропорциональный мгновенным значениям тока нагрузки, формируют сигнал ошибки путем сравнения сигнала задания и сигнала, пропорционального мгновенным значениям тока нагрузки, определяют знак сигнала ошибки, формируют тактовые импульсы стабильной частоты, запоминают знак сигнала ошибки в моменты формирования тактовых импульсов, сравнивают его со знаком сигнала ошибки в момент формирования предыдущего тактового импульса, формируют сигналы переключения вентилей инвертора при изменении знака сигнала ошибки, при формировании сигналов переключения вентилей инвеpтора, его замкнутые вентили размыкают передним фронтом тактовых импульсов, разомкнутые вентили инвертора замыкают задним фронтом тактовых импульсов, длительность тактовых импульсов принимают равной τ≥τo.
Промышленное применение изобретения в частотно-регулируемом электроприводе за счет исключения протекания сквозных токов в плечах инвертора напряжения позволяет повысить надежность электропривода.
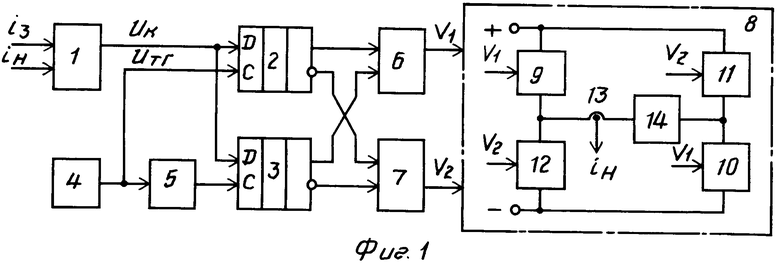
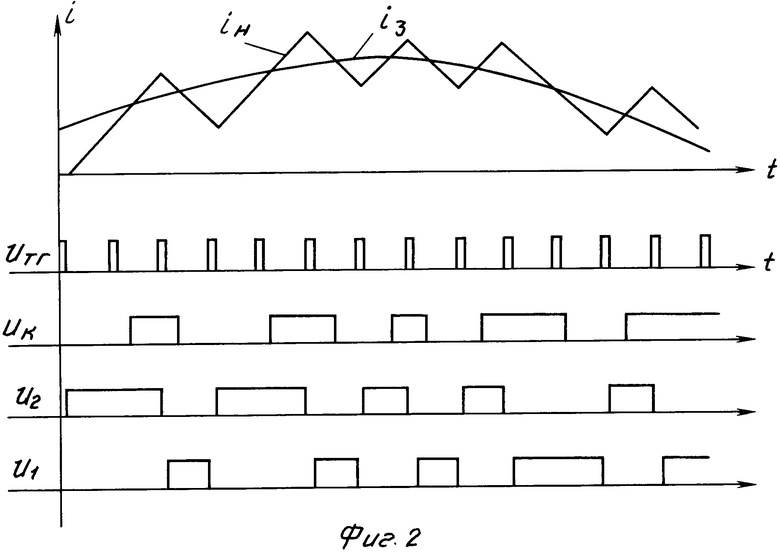
На фиг. 1 представлена функциональная схема устройства, реализующего предлагаемый способ для управления однофазным мостовым инвертором; на фиг.2 временные диаграммы, поясняющие работу устройства.
Устройство содержит компаратор 1, D-триггеры 2,3, генератор 4 тактовых импульсов, элемент НЕ 5 и элементы И 6,7. Объединенные информационные входы D-триггеров 2,3 подключены к выходу компаратора 1. Стробирующий вход D-триггера 2 подключен к выходу генератора 4 тактовых импульсов непосредственно, а стробирующий вход D-триггера 3 через элемент НЕ 5. Входы элемента И 6 подключены к прямым выходам D-триггеров 2,3, а входы элемента И 7 к их инверсным выходам. Выходные сигналы элементов И 6,7 подключены к управляющим входам силовых ключей первой 9,10 и второй 11,12 диагоналей мостового инвертора 8 соответственно.
Устройство работает следующим образом.
На первый вход компаратора 1 подается сигнал задания тока iз, а на второй вход приходит с выхода датчика 13 тока сигнал iн. пропорциональный току нагрузки 14. Если iн >iз, то на выходе компаратора 1 появляется сигнал логической "1", т.е. Uк 1. Если iн < iз, то Uк 0. D-триггер 2 изменяет свое состояние передним фронтом выходных импульсов генератора 4, а D-триггер 3 его задним фронтом. Выходные сигналы элементов И 6,7 управляют силовыми ключами соответствующих диагоналей мостового инвертора 8. Логической "1" соответствует замкнутое состояние силовых ключей, а логическому "0" их разомкнутое состояние.
Пусть D-триггеры 2,3 находятся в состоянии логического "0". Выходные сигналы элементов И 6,7 V1 0, V2 1. Нагрузка 14 подключена к источнику напряжения через замкнутые силовые ключи 11, 12, Ток в нагрузке 14 нарастает при этом iн > iз. На информационных входах D-триггеров присутствует сигнал Uк 1.
Передним фронтом приходящего тактового импульса D-триггер 2 устанавливается в единичное состояние. Выходной сигнал элемента И 7 становится равным V2 0. В силу этого замкнутые силовые ключи 11, 12 размыкаются. По окончании тактового импульса в единичное состояние устанавливается D-триггер 3. Выходной сигнал элемента И 6 становится равным V1 1, и замыкаются силовые ключи 9, 10. При этом длительность тактового импульса равна τ≥τo.
В соответствии с заявляемым способом сначала размыкаются замкнутые силовые ключи одной диагонали мостового инвертора, а затем по истечении некоторого времени, достаточного для надежного размыкания этих ключей, формируется сигнал на включение силовых ключей другой диагонали мостового инвертора, тем самым исключается возможность возникновения сквозных токов в плечах мостового инвертора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МОСТОВЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 1993 |
|
RU2093949C1 |
| Способ управления инвертором напряжения | 1988 |
|
SU1615851A1 |
| Способ управления инвертором напряжения | 1986 |
|
SU1403301A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С АВТОНОМНЫМ ИНДУКТОРОМ | 2005 |
|
RU2291548C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ M-ФАЗНЫМ ИНВЕРТОРОМ | 1990 |
|
RU2013851C1 |
| Способ управления многофазным инвертором напряжения | 1988 |
|
SU1603507A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ВАЛА В КОД | 1993 |
|
RU2108663C1 |
| Устройство для управления мостовым инвертором | 1988 |
|
SU1656645A1 |
| Способ управления мостовым инвертором напряжения | 1989 |
|
SU1653106A1 |
| Способ управления инвертором напряжения | 1989 |
|
SU1679590A1 |
Изобретение относится к электротехнике и может быть использовано в инверторах напряжения, предназначенных для частотно-регулируемого электропривода. Согласно способу измерения, по которому формируют сигнал задания и сигнал, пропорциональный мгновенным значениям тока нагрузки, формируют сигнал ошибки путем сравнения сигнала задания и сигнала, пропорционального мгновенным значениям тока нагрузки, определяют знак сигнала ошибки, формируют тактовые импульсы стабильной частоты, запоминают знак сигнала ошибки в момент формирования тактовых импульсов, сравнивают его со знаком сигнала ошибки в момент формирования предыдущего тактового импульса, формируют сигналы переключения вентилей инвертора при изменении знака сигнала ошибки путем размыкания замкнутых вентилей инвертора передним фронтом тактовых импульсов и замыканием разомкнутых вентилей инвертора задним фронтом тактовых импульсов, а длительность тактовых импульсов принимают равной τ≥ τo, где τo длительность размыкания замкнутого вентиля. 2 ил.
СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ НАПРЯЖЕНИЯ, состоящий в том, что формируют сигнал задания и сигнал, пропорциональный мгновенным значениям тока нагрузки, формируют сигнал ошибки путем сравнения сигнала задания и сигнала, пропорционального мгновенным значениям тока нагрузки, определяют знак сигнала ошибки, формируют тактовые импульсы стабильной частоты, запоминают знак сигнала ошибки в моменты формирования тактовых импульсов, сравнивают его со знаком сигнала ошибки в момент формирования предыдущего тактового импульса, формируют сигналы переключения вентилей инвертора при изменении знака сигнала ошибки, отличающийся тем, что при формировании сигналов переключения вентилей инвертора замкнутые его вентили размыкают передним фронтом тактовых импульсов, разомкнутые вентили инвертора замыкают задним фронтом тактовых импульсов, а длительность тактовых импульсов равна или больше длительности размыкания замкнутого вентиля.
| Способ управления инвертором напряжения | 1986 |
|
SU1403301A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
