Изобретение относится к электротехнике, в частности к автоматизированным электроприводам, и может найти применение в установках и приборах, требующих высоких динамических свойств при малых ошибках регулирования.
Известен способ регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем, по которому изменяют ток якоря в соответствии с величиной рассогласования действительного и заданного значений ЭДС электродвигателя, при этом действительное значение электродвижущей силы получают путем измерения мгновенного значения тока якоря электродвигателя, по которому определяют величину падения напряжения на активном сопротивлении якоря, и суммируют полученный результат с величиной измеренного мгновенного значения отфильтрованного напряжения на якоре электродвигателя (Фишбейн В.Г. Расчет систем подчиненного регулирования электропривода постоянного тока. М. Энергия, 1972, с.67-72).
Недостатком данного способа является наличие операции фильтрования напряжения на якоре электродвигателя. Это вносит запаздывание в процессе управления частоты вращения электродвигателя, что, в конечном счете, определяет низкие динамические показатели электропривода и наличие существенной ошибки регулирования.
Наиболее близким к предлагаемому по технической сущности является способ регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем, по которому определяют момент времени, когда ток якоря достигает максимального значения на интервале проводимости вентильного преобразователя, после чего измеряют мгновенное значение тока якоря электродвигателя, по которому определяют величину падения напряжения на активном сопротивлении якоря, суммируют полученный результат с величиной измеренного мгновенного значения напряжения на якоре электродвигателя, определяя действительное значение его ЭДС, и изменяют ток якоря в соответствии с величиной рассогласования действительного и заданного значений ЭДС (авт.св. СССР N 1020949, кл. Н 02 H 5/16,1982).
Недостатком этого способа является наличие ошибки регулирования электропривода. Это обусловлено наличием измерений значения тока якоря и напряжения на якоре электродвигателя после момента времени, когда ток якоря достигает максимального значения, что приводит к формированию ошибки при определении действительного значения электродвижущей силы, величина которой в значительной степени зависит от длительности времени измерения.
Задача изобретения повышение точности регулирования и уменьшение статической ошибки регулирования.
Поставленная задача по способу регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем достигается тем, что измеряют мгновенное значение тока якоря электродвигателя, по которому определяют величину падения напряжения на активном сопротивлении якоря, суммируют полученный результат с величиной измеренного мгновенного значения напряжения на якоре электродвигателя, определяют действительное значение его ЭДС и изменяют ток якоря в соответствии с величиной рассогласования действительного и заданного значений ЭДС, согласно изобретению определяют интервалы времени, начало которых соответствует зоне нарастания тока якоря, а конец моменту времени перехода производной тока якоря через нулевое значение на интервале проводимости вентильного преобразователя, в течение которых измеряют мгновенное значение тока якоря электродвигателя, по которому определяют величину падения напряжения на активном сопротивлении якоря, суммируют полученный результат с величиной измеренного мгновенного значения напряжения на якоре электродвигателя, определяя действительное значение его ЭДС, и изменяют ток якоря в соответствии с величиной рассогласования действительного и заданного значений ЭДС.
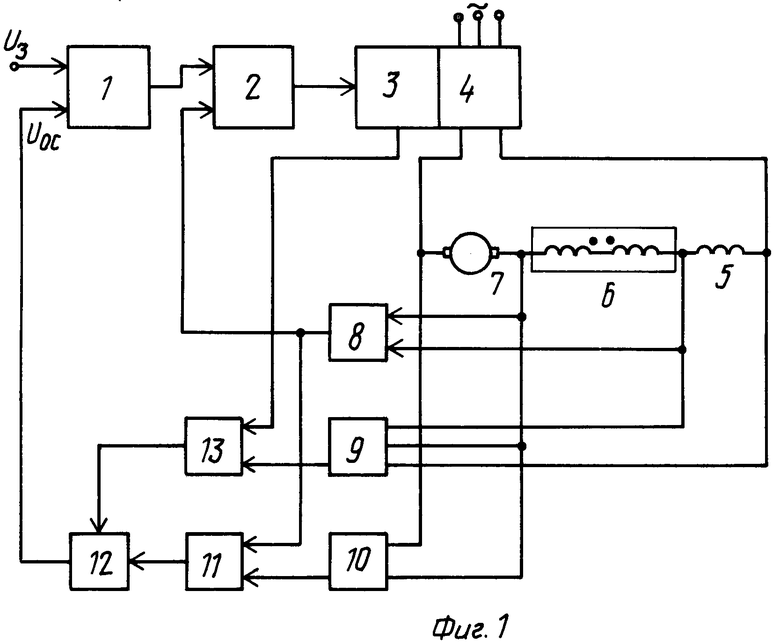
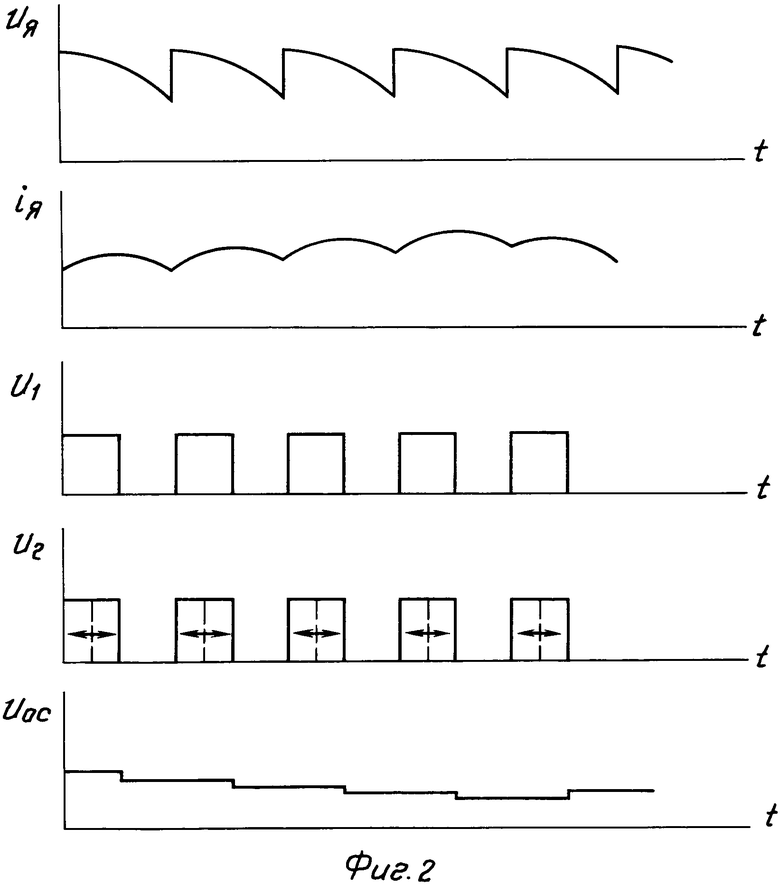
На фиг.1 представлена схема устройства, реализующего способ регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем; на фиг. 2 временные диаграммы сигналов на выходах основных элементов устройства.
Устройство содержит (фиг.1) регулятор 1 частоты вращения, выход которого соединен с установочным входом регулятора 2 тока, а выход последнего подключен к входу блока 3 импульсно-фазового управления, соединенного с вентильным преобразователем 4. К выходу вентильного преобразователя 4 подключены последовательно соединенные воздушная катушка 5 индуктивности, токовый шунт 6, выполненный в виде воздушного соленоида (индуктивной катушки) со встречно включенными обмотками, и управляемый устройством электродвигатель 7. Параллельно токовому шунту 6 включен датчик 8 тока, выход которого подсоединен к информационному входу регулятора 2 тока, а параллельно токовому шунту 6 и воздушной индуктивности 5 включен датчик 9 времени перехода производной тока якоря через нулевое значение. К щеткам якоря электродвигателя 7 подключен датчик 10 напряжения, выход которого присоединен к первому входу сумматора 11, соединенного вторым входом с выходом датчика 8 тока. Выход сумматора 11 соединен с первым входом аналогового запоминающего устройства 12, второй вход которого подключен к выходу логического блока 13, выполняющего функции формирования импульсов записи, первый вход которого соединен с блоком 3 импульсно-фазового управления, а второй вход с выходом датчика 9 времени перехода производной тока якоря через нулевое значение, при этом выход аналогового запоминающего устройства 12 соединен с информационным входом регулятора 1 частоты вращения, а установочный вход последнего присоединен к источнику Uз заданной частоты вращения.
Регулирование частоты вращения электродвигателя постоянного тока осуществляется следующим образом.
Регулирование частоты вращения производится изменением тока электродвигателя 7 в соответствии с величиной рассогласования между действительным и заданным значениями токов. Действительное значение тока измеряют в помощью датчика 8 тока и подают сигнал с выхода последнего на информационный вход регулятора 2 тока. Заданное значение тока на установочном входе регулятора 2 тока определяют в соответствии с величиной рассогласования действительного и заданного значений электродвижущей силы (пропорциональной частоте вращения двигателя), получаемого на выходе регулятора 1 частоты вращения. Сигнал U3, пропорциональный заданному значению ЭДС, подают на установочный вход регулятора 1, на информационный вход которого поступает сигнал Uос (фиг.2), пропорциональный действительному значению ЭДС электродвигателя, а следовательно, и его частоте вращения. Для определения Uос измеряют мгновенное значение тока якоря (iя) и с помощью датчика 8 тока определяют величину падения напряжения на активном сопротивлении якоря электродвигателя 7. Затем измеряют величину мгновенного напряжения (Uя) на якоре с помощью датчика 10 напряжения. Алгебраическое суммирование мгновенных значений падения напряжения на активном сопротивлении якоря и напряжения Uя производят с помощью сумматора 11. Суммарный сигнал подают на вход аналогового запоминающего устройства 12. С помощью датчика 9 формируют сигнал U1 (фиг.2), соответствующий переходу производной тока якоря через нулевое значение, точность которого является практически абсолютной, поскольку активные сопротивления воздушной катушки 5 индуктивности и токового шунта 6 равны, а вычисление суммарного сигнала выполняется датчиком 9 согласно выражению
L5 + r5·iя- r6·iя= L
+ r5·iя- r6·iя= L
Блок 13 формирует сигнал U2 (фиг.2), длительность которого определяется началом интервалов проводимости вентильного преобразователя и моментами времени перехода производной тока якоря через нулевое значение. Суммарный сигнал Uос с выхода сумматора 11, измеренный на длительности импульсов U2сохраняет свое значение до следующего момента измерения на последующем интервале проводимости вентильного преобразователя 4.
Таким образом, предлагаемый способ позволяет производить регулирование частоты вращения электродвигателя постоянного тока с вентильным преобразователем с высокой точностью и статическими показателями благодаря исключению ошибки при определении ЭДС, обусловленной наличием измерений значения тока якоря и напряжения на якоре электродвигателя после момента времени, когда ток якоря достигает максимального значения.
Применение предлагаемого способа особенно эффективно в тех случаях, когда предъявляются повышенные требования к статическим и динамическим характеристикам привода, которые могут быть удовлетворены в системах с обратной связью по ЭДС электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем | 1982 |
|
SU1020949A1 |
| Электропривод постоянного тока | 1985 |
|
SU1309234A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399881A1 |
| Электропривод постоянного тока | 1985 |
|
SU1336184A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ СКРЕПЕРА | 1992 |
|
RU2046892C1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ МЕХАНИЧЕСКИХ КОРОБОК ПЕРЕДАЧ | 1992 |
|
RU2069336C1 |
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1301757A2 |
| Вентильный электродвигатель | 1987 |
|
SU1508318A2 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
Использование: в автоматизированных электроприводах для установок и приборов, требующих высоких динамических свойств при малых ошибках регулирования. Сущность: для повышения точности регулирования и уменьшения статической ошибки регулирования измеряют мгновенное значение тока якоря электродвигателя, по которому определяют величину падения напряжения на активном сопротивлении якоря, суммируют полученный результат с величиной измеренного мгновенного значения напряжения на якоре электродвигателя и изменяют ток якоря в соответствии с величиной рассогласования, а электродвижущую силу (ЭДС) определяют на интервале проводимости вентильного преобразователя по достижении током якоря максимального значения, фиксацию значения ЭДС осуществляют с помощью устройства выборки-хранения, накопительный элемент которого подключают в начале интервала проводимости, а считывание информации о значении ЭДС производят в упомянутый момент времени. 2 ил.
СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА с вентильным преобразователем, при котором измеряют мгновенное значение тока якоря электродвигателя, по которому определяют величину падения напряжения на активном сопротивлении якоря, суммируют полученный результат с величиной измеренного мгновенного значения напряжения на якоре электродвигателя на интервале проводимости вентильного преобразователя, определяя действительное значение его ЭДС, и изменяют ток якоря в соответствии с величиной рассогласования действительного и заданного значений ЭДС, отличающийся тем, что указанные измерения ЭДС на интервале проводимости вентильного преобразователя производят с момента нарастания тока якоря до момента перехода производной тока якоря через нулевое значение.
| Способ регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем | 1982 |
|
SU1020949A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
