Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока.
Целью изобретения является повышение надежности.
На чертеже представлена схема электропривода.
Электропривод содержит последовательно включенные задатчик 1 частоты вращения, регулятор 2 частоты вращения, регулятор 3 тока якоря с подключенными к их входам датчиками 4 и 5 частоты вращения и тока якоря, а также вентильный преобразователь 6, подключенный к якорной обмотке электродвигателя 7. Входы датчика ЭДС 8 электродвигателя 7 подклюены к датчику 5 тока и к датчику 9 напряжения, а его выход через первый блок 10 выделения модуля подключен к первому входу регулятора 11 ЭДС, к второму входу которого подключен источник напряжения, пропорционального номинальной ЭДС электродвигателя. Выход регулятора 11 ЭДС соединен с первым входом вентильного возбудителя 12, подключенного к обмотке 13 возбуждения электродвигателя 7. Датчик 14 тока возбуждения электродвигателя 7 соединен с входом измерителя 15 потока возбуждения, выход которого подключен к второму входу возбудителя 12.
К входам первого суммирующего усилителя 16 подключены выходы датчика 9 напряжения и датчика 17 напряжения на компенсационной обмотке электродвигателя 7, а также выход множителя 18, входы которого соединены с датчиком 4 частоты вращения и с измерителем 15 потока возбуждения.
Выход суммирующего усилителя 16 соединен с информационным входом первого аналогового запоминающего устройства 19, выход которого через второй блок 20 выделения модуля подключен к первому входу порогового элемента 21 с гистерезисной характеристикой. Первый вход делителя 22 соединен с датчиком 17 напряжения на компенсационной обмотке, а второй - с датчиком 5 тока якоря, выход делителя 22 подключен к информационному входу второго аналогового запоминающего устройства 23, выход которого через третий блок 24 выделения модуля соединен с вторым входом порогового элемента 21, выход которого соединен с управляющим входом ключа 25, размыкающий контакт 26 которого включен между входом вентильного преобразователя 6 и выходом регулятора 3 тока, а замыкающий контакт 27 включен между входом преобразователя 5 и выходом второго суммирующего усилителя 28 первый вход которого подключен к датчику напряжения якоря электродвигателя 7, а второй вход через стабилитроны 29 - к датчику 17 напряжения на компенсационной обмотке электродвигателя 7. Управляющие входы 30 и
31 запоминающих устройств 19 и 23 подключены к блоку 32 определения времени достижения током якоря максимального значения на интервале проводимости вентильного преобразователя.
Электропривод работает следующим образом.
Регулятор 2 частоты вращения, имеющий нелинейную характеристику типа «зона
Q насыщения, обеспечивает поддержание заданной частоты вращения (при значениях ниже основной) путем сравнения заданной и действительной, измеряемой датчиком 4 частоты врацхения и ограничение задания на ток якоря, поддерживаемого регулято5 ром 3 тока якоря путем сравнения заданного и действительного значений тока, измеряемых датчиком 5 тока якоря, воздействием на напряжение вентильного преобразователя 6.
В регуляторе 11 ЭДС, имеющем нели нейную характеристику типа «зона насыщения, сравниваются значения, заданные сигналом и измеряемые датчиком 8 ЭДС электродвигателя 7.
При регулировании частоты вращения в
5 зоне выще основной сигнал с выхода датчика 8 ЭДС уменьщает выходной сигнал регулятора 11 ЭДС.
Это приводит к снижению уставки на поток возбуждения, которая задается выходным сигналом регулятора 11, подводимым
0 к первому входу возбудителя 12, где он сравнивается с сигналом отрицательной обратной связи по потоку возбуждения, поступающим от измерителя 18 потока возбуждения, получающим питание от датчика 14 тока возбуждения.
5 В процессе работы электропривода осуществляется непрерывный контроль исправности и стабильности крутизны выходных характеристик датчиков частоты вращения 4, напряжения 9, тока возбуждения 14 и
р. измерителя 15 потока возбуждения.
С этой целью на входы суммирующего усилителя 16 подаются сигналы от датчиков 9 и 17 и множителя 18, напряжение на выходе усилителя 16 определяется зависимостью
45
U 6 Kl-U9-K2U 7-K3U,S,
(i;
где Ug, , - напряжения на выходе датчиков 9 и 17, и множителя 18 принципиальной 50схемы;
К, К.Ч, К.З - коэффициенты пропорциональности.
Напряжение снимается с выхода датчика 17 напряжения в компенсационной обмотке электродвигателя 7, определяется за- 55 висимостью
(l7( + LKO-Г-),
at
12)
где , LKO - активное сопротивление и индуктивность компенсационной обмотки двигателя;
Кп - коэффициент передачи датчика 17.
Температурные изменения активного сопротивления компенсационной обмотки отражают температурные изменения активного сопротивления обмотки якоря , поэтому в моменты времени, когда производная тока
якоря равна нулю, напряжение выхода датчика 17 пропорционально падению напряжения в активном сопротивлении обмотки якоря А6 я .(3)
Напряжение , снимаемое с выхода множителя 18, определяется уравнением
(/, (К.-Ф -Ш),
(4)
где Ф , со - поток возбуждения и частота вращения электродвигателя; Ке - конструктивная постоянная электродвигателя;
Kis - коэффициент передачи множителя 18.
Как следует из уравнения (4), напряжение на выходе множителя 18 пропорционально ЭДС двигателя
./(,.ф.со.
(5)
Блок 32 вырабатывает короткие импульсы напряжения в моменты времени, когда ток якоря /я достигает максимального значения на интервале проводимости вентильного преобразователя 6, т. е. когда производная
dl« тока якоря -т,- равна нулю и, следовательно,
ЭДС самоиндукции обмотки якоря L X
также равна нулю. Эти импульсы at
напряжения поступают на управляющий вход 30 аналогового запоминающего устройства 19. В моменты поступления указанных импульсов осуществляется запись в устройство 19 сигнала, подведенного к его информационному входу от усилителя 16. Следовательно, в устройство 19 записывается сигнал, который контролирует согласно зависимостям (1), (3), (4) и (5) соблюдение условия равновесия якорной цепи двигателя
(Уя-/«; я-Ке-Ф
(6)
в момент времени, когда ЭДС самоиндукции обмотки якоря равна нулю.
При исправных датчиках частоты вращения 4, напряжения 9, тока возбуждения 14 и измерителя 15 потока возбуждения, а также при сохранении стабильности крутизны их выходных характеристик напряжение Ui6, записанное в моменты поступления импульсов от блока 32 в аналоговое запоминающее устройство 19, имеет малые значения, не превышающие уставки срабатывания порогового элемента 21.
При нарущении исправности этих элементов либо существенном изменении крутизны их выходных характеристик сигнал на выходе запоминающего устройства 19 превыщает уставку порогового элемента 21, на выходе последнего появляется напряжение, которое поступает на управляющий вход ключа 25. При этом контакты 26 ключа 25 размыкаются, т. е. вход вентильного преобразователя 6 отключается от регулятора 8
тока, а контакты 27 ключа 25 замыкаются и подключают вход преобразователя 6 к выходу суммирующего усилителя 28. На выходе этого усилителя формируется напряжение, определяемое поданными на его вход сигналом непрерывной обратной связи по напряжению преобразователя и сигналом по току якорной цепи с отсечкой, создаваемой стабилитронами 29. При этом электропривод переключается в режим динамического торможения.
В процессе работы электропривода осуществляется также непрерывный контроль исправности датчика 5 тока якоря, стабильности крутизны его выходной характеристики и контроль перегрева обмотки якоря. На входы делителя 22 подается сигнал
от датчика 17, определенный уравнением (2), и сигнал от датчика 5 тока, пропорциональный току якоря. Напряжение, снимаемое с выхода делителя 22 и поступающее на информационный вход аналогового запоминающего устройства 23, в моменты
поступления на управляющий вход 31 этого устройства импульсов напряжения блока 32 пропорционально активному сопротивлению компенсационной обмотки Rm и не зависит от величины тока якоря, т. е. это напряжение отражает степень перегрева обмотки якоря двигателя.
При чрезмерном перегреве обмотки якоря выходной сигнал запоминающего устройства 23 превыщает уставку элемента 21, этот элемент срабатывает и воздействует
на ключ 25.
При неисправностях либо чрезмерном изменении крутизны выходной характеристики датчика 5 тока также происходит срабатывание порогового элемента 21 под действием выходного сигнала запоминающего устройст- ва 28.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, последовательно связанные задатчик частоты вращения, регуляторы частоты вращения и тока якоря и вентильный преобразователь, подключенный к якорной обмотке электродвигателя.
датчики частоты вращения и тока, выходы которых подключены к входам соответствующих регуляторов, последовательно соединенные измеритель ЭДС, входы которого подключены к датчикам напряжения и тока яко- ря, первый блок выделения модуля, регулятор ЭДС и вентильный возбудитель, выход которого подключен к обмотке возбуждения, датчик тока возбуждения, соединенный с входом измерителя потока возбуждения, выходом подключенного к вентильному возбуди- телю, второму входу возбудителя, отличающийся тем, что, с целью повышения надежности электропривода, он дополнительно снабжен датчиком падения напряжения на компенсационной обмотке электродвигателя, блоком определения времени достижения током якоря максимального значения на интервале проводимости вентильного преобразователя, первым суммирующим усилителем с тремя входами, вторым суммирующим усилителем с двумя входами, множителем, делителем, двумя аналоговыми запоминающими устройствами, двумя дополнительными блоками выделения модуля, пороговым элементом с гистерезисной характеристикой, управляемым ключом, и двумя встречно включенными стабилитронами, при этом выход датчика напряжения на компенсационной обмотке электродвигателя соединен с первым входом первого суммирующего усилителя, второй вход - с датчиком напряжения на якоре, а третий вход - с выходом множителя, входы которого подключены к выходам
5
0 5
0
датчика частоты вращения и измерителя потока возбуждения, причем выход первого суммирующего усилителя соединен с информационным входом первого аналогового запоминающего устройства, выход которого через второй блок выделения модуля соединен с первым входом порогового элемента с гистерезисной характеристикой, первый вход делителя соединен с датчиком напряжения на компенсационной обмотке электродвигателя, второй вход - с датчиком тока якоря, выход делителя подключен к информационному входу второго аналогового запоминающего устройства, выход которого через третий блок выделения модуля соединен с вторым входом порогового элемента с гистерезисной характеристикой, выход которого соединен с управляющим входом ключа, размыкающий контакт которого включен между входом вентильного преобразователя и выходом регулятора тока, а замыкающий контакт - между входом вентильного преобразователя и выходом второго суммирующего усилителя, первый вход которого соединен с датчиком напряжения, а второй через стабилитроны - с компенсационной обмоткой электродвигателя, при этом управляющие входы обоих аналоговых запоминающих устройств соединены с блоком определения времени достижения током якоря максимального значения на интервале проводимости вентильного преобразователя, подключенного параллельно датчику тока якоря.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока с двухзонной системой регулирования скорости | 1977 |
|
SU736319A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1992 |
|
RU2046537C1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Стенд для испытания двигателя внутреннего сгорания | 1990 |
|
SU1814043A1 |
| Способ защиты обмотки якоря электродвигателя от перегрева и устройство для его осуществления | 1984 |
|
SU1279010A1 |
| Вентильный электродвигатель | 1987 |
|
SU1508318A2 |
| Способ регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем | 1982 |
|
SU1020949A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Вентильный электродвигатель | 1986 |
|
SU1328891A2 |
Изобретение относится к электроте.х- нике и может быть использовано для управления электродвигателями постоянного тока. Повышение надежности обеспечивается за счет того, что дополнительно контролируют исправность датчиков частоты врашения 4, тока якоря 5, тока возбуждения 14 и измерителя потока возбуждения 15, а также стабильность крутизны их выходных характеристик. Проверяют соблюдение условия равновесия якорной цепи электродвигателя с учетом температурных изменений сопротивления обмотки якоря электродвигателя. 1 ил. (Л со со С5 00 N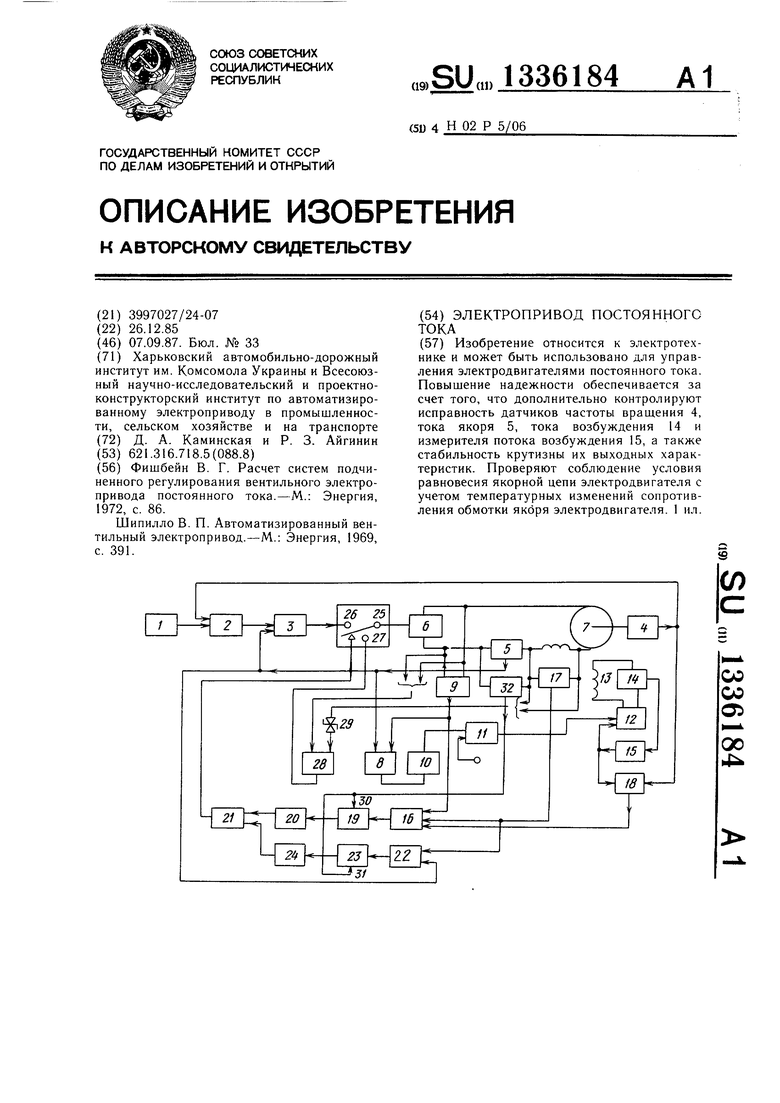
| Фишбейн В | |||
| Г | |||
| Расчет систем подчиненного регулирования вентильного электропривода постоянного тока.-М.: Энергия, 1972, с | |||
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| Шипилло В | |||
| П | |||
| Автоматизированный вентильный электропривод.-М.: Энергия, 1969, с | |||
| Ситценабивная машина | 1922 |
|
SU391A1 |
