Изобретение относится к электро технике, в частности к автоматизир ванным электроприводам, и может на ти применение в установках и прибо рах, требующих высоких динамически свойств при малых ошибках регулиро вания. Известен способ регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем, при котором изменяю ток якоря в соответствии с величиной рассогласования действительного и заданного значений электродвижущей силы электродвигателя, при этом действительное значение элект)одвижущей силы получают с по мощью тахогенератора С Недостатком данного способа рег лирования является получение сигна обратной связи, пропорционального действительному значению ЭДС электродвигателя с помощью тахогенерат ра. Это усложняет конструкцию устройства и технологию изготовления его электротехнической части. В некоторых случаях применение тахогенератора невозможно по конструкт ным причинам. Наиболее близким к предлагаемом по технической сущности является способ регулирования частоты враще электродвигателя постоянного тока с вентильным преобразователем, при котором измеряют мгновенное значение тока якоря элекРродвигателя, п которому определяют величину падения напряжения на активном сопротивлении якоря, суммируют получен ный результат с величиной измеренного мгновенного значения отфильтрованного напряжения на якоря элек тродвигателя, определяя действител ное, значение его злектродвижущей силы, и изменяют ток якоря в соответствии с величиной рассогласования действительного и заданного зна чений электродвижущей силы 2 . Недостатком известного способа р гулирования является сравнительно низкие динамические показатели элек тропривода и наличие существенной ошибки регулирования, Это обусловлено наличием операций фильтрования напряжения на якор электродвигателя, вносящей запаздыв ние в процесс управления частотой вращения. Цель изобретения - повышение быстродействия и уменьшение статической ошибки регулирования. Поставленная цель достигается тем, что определяют моменты времени когда ток якоря достигает максималь ного значения на интервале проводимости вентильного преобразователя, после чего измеряют мгновенное значение тока якоря электродвигателя, по которому определяют величину паления напряжения на активном сопротивлении якоря, суммируют полученный результат с величиной измеренного мгновенного значения напряжения на якоре электродвигателя, определяя действительное значение его электродвижущей силы, и измеряют ток якоря в соответствии с величиной рассогласования действительного и заданного значений электродвижущей силы. На фиг. 1 представлена блок-схема варианта устройства, реализующего способ регулирования частоты вращения электрюдвигателя постоянного тока с вентильным преобразователем на фиг.2 - временные диаграммы сигналов на выходах основных элементов устройства. Устройство содержит (фиг. 1) регулятор 1 ч-астоты вращения, выход которого соединен с установочным входом регулятора 2 тока, а выход последнего подключен к входу блока 3 импульсно-фазового управления, соединенного с вентильным преобразователем 4. К выходу вентильного преобразователя 4 подключены последовательно соединенные токовый шунт 5 и, управляемый устройством, электродвигатель 6. Параллельно токовому шунту 5 включены датчик 7 тока, выход которого подсоединен к информационному входу регулятора 2 тока, а также датчик 8 времени достижения током максимсшьного значения. К щеткам якоря электродвигателя 6 подключен датчик 9 напряжения, выход которого присоединен к первому входу сумматора 10, соединенного вторым входом с выходом датчика 7 тока. Выход сумматора 10 соединен с первым входом аналогового запоминающего устройства 11, второй вход которого подключен к выходу.датчика 8 времени достижения током максимального значения, при этом выход аналогового запоминающего устройства 11 соединен с информационным входом регулятора 1 частоты вращения, а установочный вход последнего присоединен к источнику Uj заданной частоты вращения. Регулиройанне частоты вращения электродвигателя постояниого тока осуществляется следующим образом. Регулировамие частоты вращения производится изменением тока якоря электродвигателя 6 в соответствии с величиной рассогласования между действительным и заданным значениями токов. Действительное значение тока измеряют с помощью датчика 7 тока и подают сигнал с выхода последнего на информационный вход регулятора 2 тока. Заданное значение тока на установочном входе регулятора 2
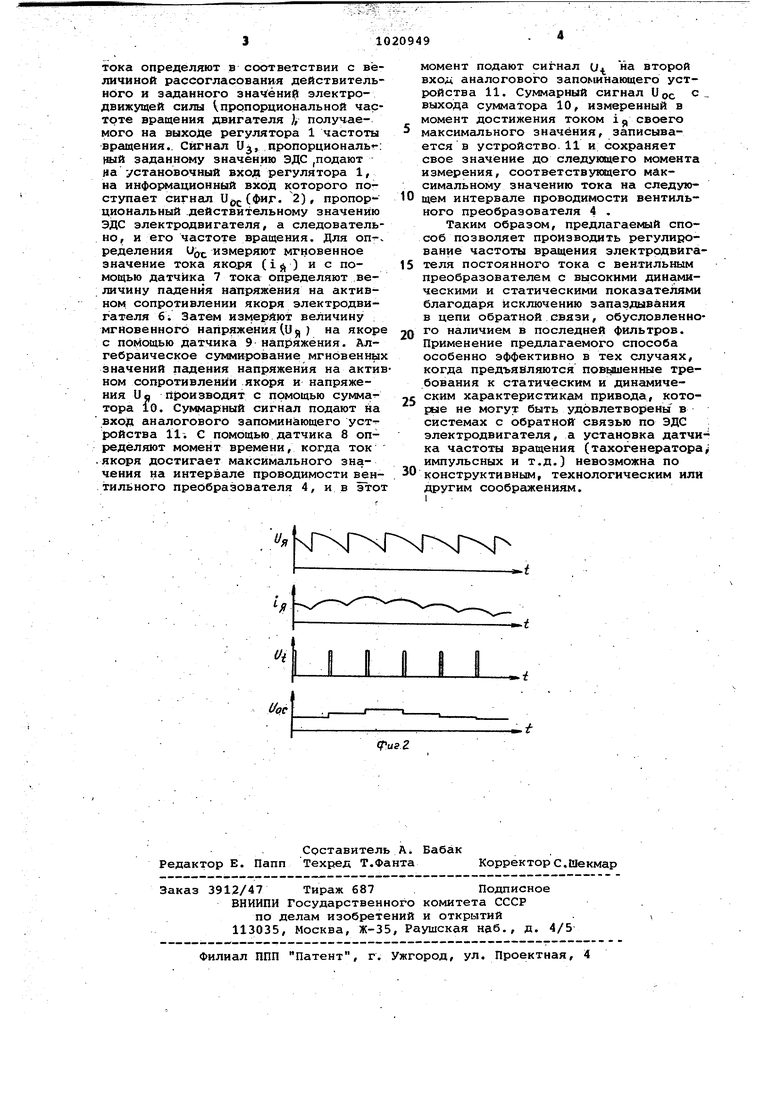
тока определяют в соответствии с величиной рассогласования действительного и заданного электродвижущей силы Vпропорциональной частоте вращения двигателя ), получаемого на выходе регулятора 1 частоты вращения.. Сигнал Uj, пропорционалы-: (ИЛИ заданному значению ЭДС ,подают установочный вход регулятора 1, на информационный вход которого потступает сигнал и;5(фиг. 2), пропорциональный действительному значению ЭДС электродвигателя, а следовательно, и его частоте вращения. Для оп- ределения С/о измеряют мгновенное значение тока якоря ( и ° мощью датчика 7 тока определяют величину падения напряжения на активном сопротивлении якоря электродвигателя 6; Затем измеряют величину : мгновенного напряжения(Uя ) якоре с помощью датчика 9 напряжения. Алгебраическое суммирование мгновенных значений падения напряжения на активном сопротивлении якоря и напряжения и о производят с помощью суммам тора 10. Суммарный сигнал подают на вход аналогового запоминающего устройства 11. С помощью датчика 8 определяют момент времени, когда ток .якоря достигает максимального значения на интервале проводимости вентильного преобразователя 4, ив это
момент подают сигнал и на второй вхом аналогового запоминающего устройства 11. Суммарный сигнал UQC выхода сумматора 10, измеренный в момент достижения током i своего 5 максимального значения, записывается в устройство 11 и сохраняет свое значение до следующего момента измерения, соответствукяцего максимальному значению тока на следующем интервале проводимости вентильного преобразователя 4 .
Таким образом, предлагаемый способ позволяет производить регулирование частоты вращения электродвигателя постоянного тока с вентильным
15 преобразователем с высокими динамическими и статическими показателями благодаря исключению запаздывания в цепи обратной связи, обусловленного наличием в последней фильтров.
20 Применение предлагаемого способа особенно эффективно в тех случаях, когда предъявляются повышенные требования к статическим и динамиче-е. ским характеристикам привода, крто рые не могут быть удовлетворены в системах с обратной связью по ЭДС электродвигателя, а установка датчика частоты вращения (тахогенератора импульсных и т.д.) невозможна по 30 конструктивным, технологическим или другим соображениям.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1992 |
|
RU2046537C1 |
| Электропривод постоянного тока | 1985 |
|
SU1309234A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399881A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1301757A2 |
| Вентильный электродвигатель | 1981 |
|
SU995216A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Двухзонный вентильный электропривод | 1979 |
|
SU886178A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Устройство для управления асинхронным электродвигателем с постоянным вращающим моментом | 1976 |
|
SU778721A3 |
еПОСОБ РЕГУЛИРОВАНИЯ ЧАСТбта ВРАЩЕНИЯ ЭЛЕКТРОдаИГ АТЕЛЯ ПОСТОИЯННОГО ТОКА с ВЕНТИЛЬНЫМ ПРЕОВРА364. ВАТЕЛЕМ, при котором измеряют мгйо; вёНное значение тока якори злектро- - двигателя, по которому определяют величину падения напряжения на активном сопротивлении , суммируют псшучеиный результат с величиной измеренного мгновенного значения напряжения на якоре электродвигателя, определяя действительное значение его электродвижущей силы, и-изменяют ток якоря в соответствии с величиной рассогласования действительного и заданного значений злектродвижуцей силы, отличающ и и с я тбим, что, с целью повышения быстродействия и уменьшения статической ошибки регулирования, определяют моменты временц, когда ток якоря достигает максимального значения на интервале проводимости .вентильного преобразователя, после .чего производят упомянутые измерения мгновенных значений тока якоря электродвигателя и напряжения на , его якоре. о « 4i со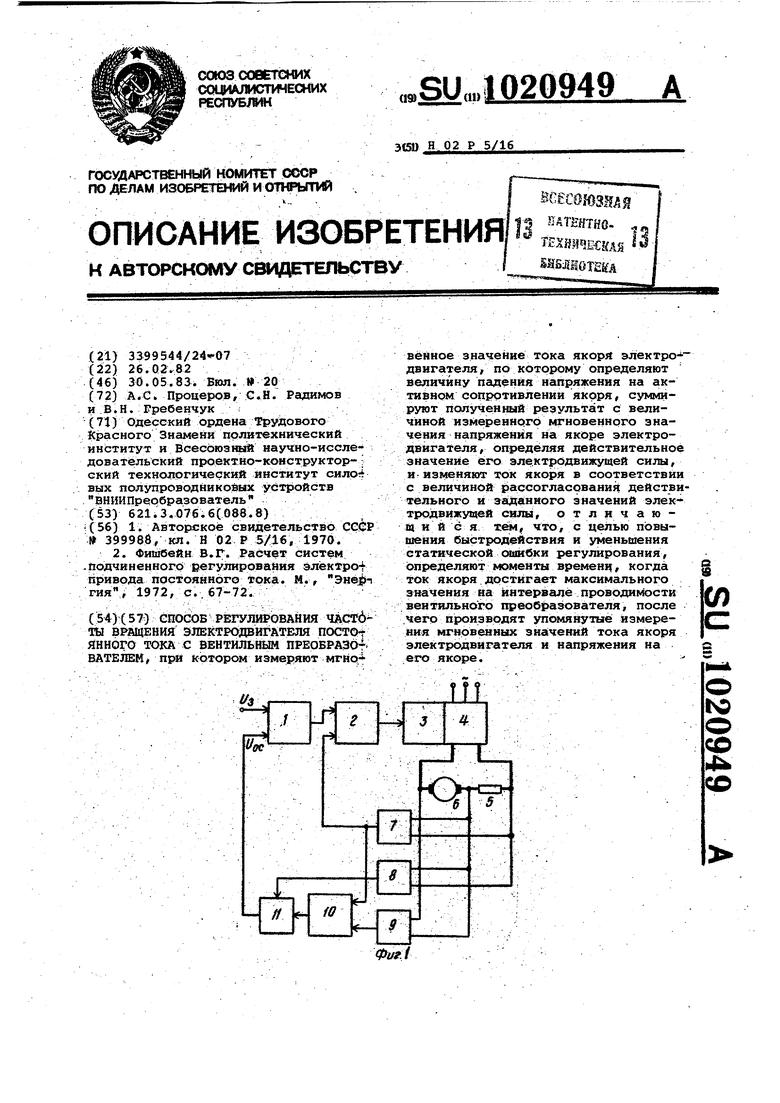
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НЕРЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 0 |
|
SU399988A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Фишбейн В.Г | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М., гия, 1972, с..67-72. | |||
