. Изобретение относится к электротехнике, в частности к автоматизированным электроприводам, и может быть использовано в системах автоматичес- кого регулирования быстродействующих тиристорных электроприводов с малыми ошибками регулирования, не имеющих датчиков обратной связи по скорости.
Целью изобретения является повы- шение точности регулирования.
На фиг.1 изображена схема электропривода, реализующего предлагаемый способ; на фиг.2 и 3 - диаграммы, поясняющие работу электропривода.
Электропривод содержит последовательно соединенные регуляторы ЭДС 1 и тока 2, включенные на входе системы 3 управления тиристорного преобразователя 4. К выходу тиристорного преобразователя 4 подключены последовательно соединенные якорь двигателя 5 и токовый шунт 6. Параллельно токовому шунту 6 подключен датчик 7 максимального тока на интервале проводи- мости преобразователя, выход которого соединен с первым входом первого блока 8 умножения, первым входом блока 9 управления и входом обратной связи регулятора 2 тока. Первый выход сие- темы 3 управления соединен с входом первого блока 10 вычисления функции синуса, с входом первого функционального преобразователя 11 и первым входом первого блока 12 вычитания, вто- рой вход которого соединен с выходом пер&ого функционального преобразователя 11. Выход первого блока 10 вычисления функции синуса подключен к первому входу второго блока 13 умно- жения, выход которого связан через блок 14 деления, второй функциональный преобразователь 15 и инвертор 16 с третьим входом первого блока 12 вычитания. Выход последнего через вто- рой блок 17 вычисления функции синуса и третий блок 18 умножения подключен к первому входу второго блока 19 вычитания, к второму входу которого
подключен выход первого блока 8 умно
жения. Выход второго блока 19 вычитания соединен с входом обратной связи регулятора 1 ЭДС двигателя, вход задания которого через четвертый блок 20 умножения подключен к блоку 21 задания скорости. Блок 22 измерения максимального значения напряжения своими входами подключен к сети, питающей тиристорный преобразователь.
0 5 0 5 0 з
0
е
а выходом - к блоку 23 памяти. Выход последнего соединен с вторыми входами второго блока 13 умножения и третьего блока 18 умножения. Блок 24 памяти постоянных величин первым и вторым выходами соединен с вторыми входами соответственно первого 8 и четвертого 20 блоков умножения, а третий выход блока 24 соединен с четвертым входом первого блока 12 вычитания. Второй выход системы 3 управления тиристорного преобразователя 4 подключен к второму входу блока 9 управления. Выходы блока 9 управления соединены с входами управления регуляторов 1 и 2, блоков 12 и 19 вычитания, блоков 8, 13, 18 умножения, датчика 7, блока 22 измерения максимального значения
напряжения, функциональных преобразователей 11 и 15, блоков 10 и 17 вычисления функции синуса, блока 23 памяти, блока 21 задания и блока 20 умножения.
Электропривод работает следующим образом.
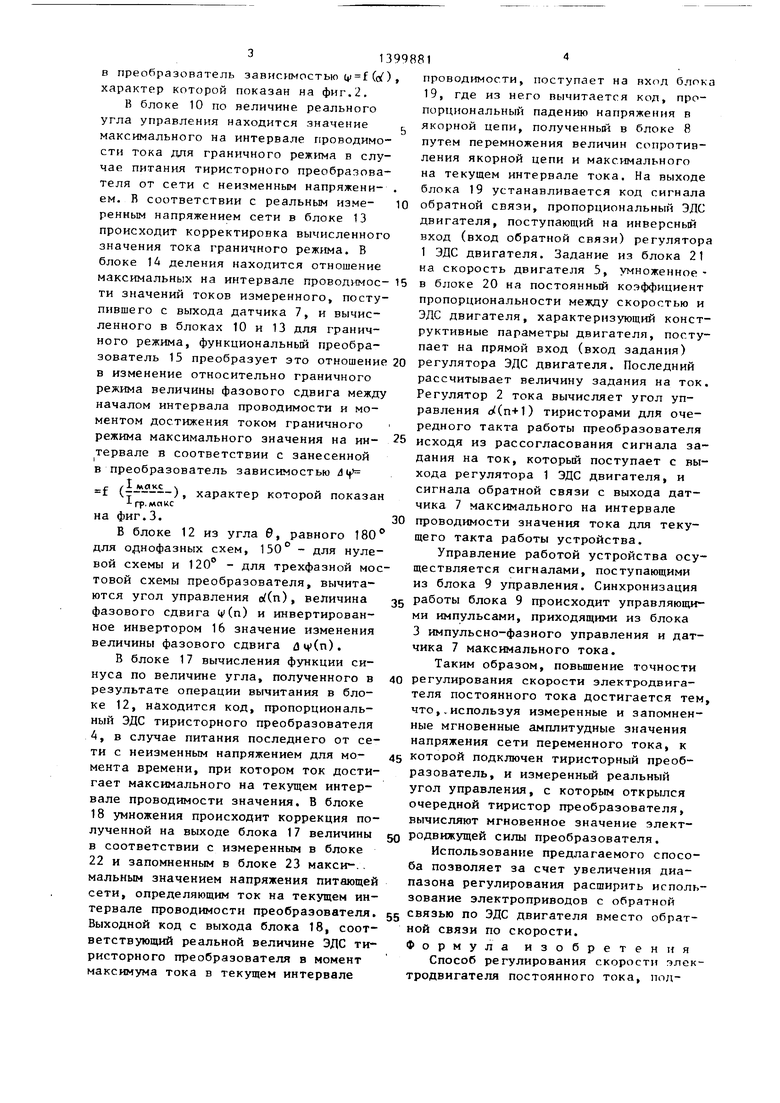
В исходном положении на выходе регулятора 2 тока установлен код угла о/(п) управления тиристорами, который поступает на вход блока 3 импульсно- фазового управления, где происходит отсчет временных интервалов, начинающихся с моментов естественной коммутации соответствующих тиристоров и оканчивающихся моментами подачи импульсов управления на эти тиристоры. Величина этих временных интервалов, соответствующая реальным углам управления, измеряется в блоке 3 импульс- но-фазового управления. Открывание очередного тиристора происходит сразу же по окончании вычислений регулятором 2 тока угла управления, если последний больше текущего реального угла, и в момент равенства измеренного и заданного углов управления, если текущий угол в момент окончания вычислений в регуляторе 2 тока меньше вычисленного. Код измеренного реального угла управления, с которым произошло открывание в рассматриваемом периоде очередного тиристора, посту- па ет на входы блока 10 вычисления функции синуса, блока 12 вычитания и функционального преобразователя 11. Последний преобразует величину кода угла управления od в величину фазового сдвига в соответствии с занесенной
в преобразователь зависимостью и f (oi ) , характер которой показан на фиг.2,
В блоке 10 по неличине реального угла управления находится значение максимального на интервале проводимости тока для граничного режима в случае питания тиристорного преобразователя от сети с неизменным напряжени- . ем. В соответствии с реальным измеренным напряжением сети в блоке 13 происходит корректировка вычисленного значения тока граничного режима. В блоке 14 деления находится отношение
проводимости, поступает на вход блока 19, где из него вычитается код, пропорциональный падению напряжения в
якорной цепи, полученньй в блоке 8 путем перемножения величин сопротивления якорной цепи и максимального на текущем интервале тока. На выходе блока 19 устанавливается код сигнала
обратной связи, пропорциональный ЭДС двигателя, поступающий на инверсный вход (вход обратной связи) регулятора 1 ЭДС двигателя. Задание из блока 21 на скорость двигателя 5, умноженное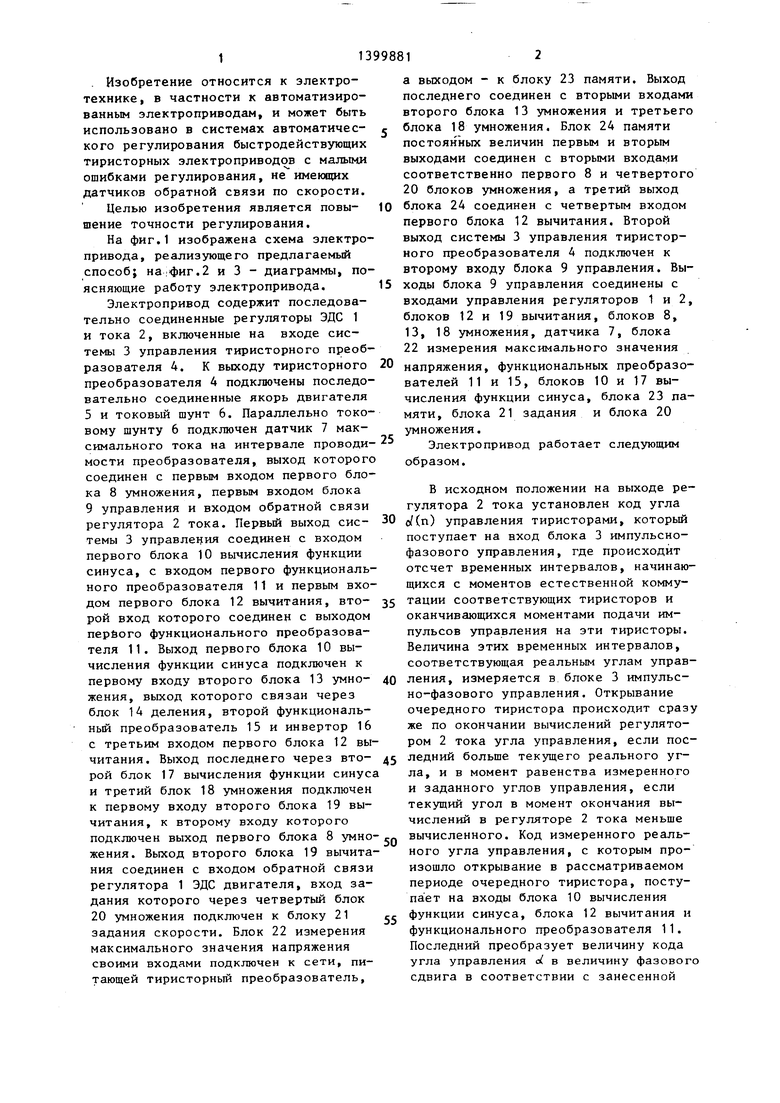
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399875A1 |
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода | 1989 |
|
SU1644345A1 |
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода постоянного тока | 1984 |
|
SU1277333A1 |
| Устройство для регулирования скорости электродвигателя | 1980 |
|
SU964936A1 |
| Способ управления тиристорным электроприводом | 1987 |
|
SU1457139A1 |
| Способ регулирования тока адаптивного электропривода | 1986 |
|
SU1372571A1 |
| Способ управления тиристорным преобразователем | 1987 |
|
SU1539934A1 |
| Способ регулирования тока вентильногоэлЕКТРОпРиВОдА пОСТОяННОгО ТОКАи уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU801215A1 |
| Способ управления тиристорным электроприводом | 1984 |
|
SU1169127A1 |
| Способ управления тиристорным электроприводом постоянного тока и устройство для его осуществления | 1982 |
|
SU1061227A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах, не имеющих датчиков обратной связи по скорости. Целью изобретения является повышение точности регулирования. По данному способу с помощью блока 22 и блока 23 измеряют и запоминают мгновенные амплитудные значения напряжения сети. Система управления 3 тиристорного преобразователя 4 определяет реальный угол управления тиристорного преобразователя 4. Вычисляют мгновенные значения ЭДС преобразователя 4 в режиме прерывистых токов для момента времени достижения током максимального значения на интервале проводимости. Вычитая из вычисленной ЭДС преобразователя 4 падение напряжения в активном сопротивлении якорной цепи, определяют ЭДС двигателя 5, Которую используют в качестве сигнала обратной связи по скорости. В соответствии с величиной и знаком рассогласования действительного и заданного значений скорости двигателя 5 изменяют ток якорной цепи, воздействуя на величину угла управления тиристорного преобразователя 4. 3 ил. (Л со со оо 00 1Раз.}
максимальных на интервале пpoвoд мoc- 15 в блоке 20 на постоянный коэффициент
ти значений токов измеренного, поступившего с выхода датчика 7, и вычисленного в блоках 10 и 13 для граничного режима, функциональный преобразователь 15 преобразует это отношение 20 регулятора ЭДС двигателя. Последний
в изменение относительно граничного режима величины фазового сдвига между началом интервала проводимости и моментом достижения током граничного режима максимального значения на интервале в соответствии с занесенной в преобразователь зависимостью /1у t мсякс
f (t
- гр.мпис
), характер которой показан
на фиг.З.
В блоке 12 из угла 0, равного 180 для однофазных схем, 150 - для нулевой схемы и 120° - для трехфазной мостовой схемы преобразователя, вычитаются угол управления о(п), величина фазового сдвига (n) и инвертированное инвертором 16 значение изменения величины фазового сдвига Дч (п).
В блоке 17 вычисления функции синуса по величине угла, полученного в результате операции вычитания в блоке 12, находится код, пропорциональный ЭДС тиристорного преобразователя А, в случае питания последнего от сети с неизменным напряжением для момента времени, при котором ток достигает максимального на текущем интервале проводимости значения. В блоке 18 умножения происходит коррекция порассчитывает величину задания на ток. Регулятор 2 тока вычисляет угол управления о((п+1) тиристорами для очередного такта работы преобразователя
25 исходя из рассогласования сигнала задания на ток, которьй поступает с выхода регулятора 1 ЭДС двигателя, и сигнала обратной связи с выхода датчика 7 максимального на интервале
30 проводимости значения тока для текущего такта работы устройства.
Управление работой устройства осуществляется сигналами, поступающими из блока 9 управления. Синхронизация
25 работы блока 9 происходит управляющими импульсами, приходящими из блока 3 импульсно-фазного управления и датчика 7 максимального тока.
Таким образом, повьппение точности
40 регулирования скорости электродвигателя постоянного тока достигается тем, что,.используя измеренные и запомненные мгновенные амплитудные значения напряжения сети переменного тока, к
45 которой подключен тиристорный преобразователь, и измеренный реальный угол управления, с которым открылся очередной тиристор преобразователя.
вычисляют мгновенное значение элект- лученной на выходе блока 17 величины gQ родвижущей силы преобразователя, в соответствии с измеренным в блоке Использование предлагаемого способа позволяет за счет увеличения диапазона регулирования расширить использование электроприводов с обратной тервале проводимости преобразователя. 55 связью по ЭДС двигателя вместо обрат- Выходной код с выхода блока 18, соот- ной связи по скорости.
Формула изобретения
Способ регулирования скорости зяск- тродвигателя постоянного тока, под22 и запомненным в блоке 23 макси -. . мальньм значением напряжения питающей сети, определяющим ток на текущем инветствующий реальной величине ЭДС тиристорного преобразователя в момент максимума тока в текущем интервале
пропорциональности между скоростью и ЭДС двигателя, характеризующий конструктивные параметры двигателя, поступает на прямой вход (вход задания)
рассчитывает величину задания на ток. Регулятор 2 тока вычисляет угол управления о((п+1) тиристорами для очередного такта работы преобразователя
исходя из рассогласования сигнала задания на ток, которьй поступает с выхода регулятора 1 ЭДС двигателя, и сигнала обратной связи с выхода датчика 7 максимального на интервале
проводимости значения тока для текущего такта работы устройства.
Управление работой устройства осуществляется сигналами, поступающими из блока 9 управления. Синхронизация
работы блока 9 происходит управляющими импульсами, приходящими из блока 3 импульсно-фазного управления и датчика 7 максимального тока.
Таким образом, повьппение точности
регулирования скорости электродвигателя постоянного тока достигается тем, что,.используя измеренные и запомненные мгновенные амплитудные значения напряжения сети переменного тока, к
которой подключен тиристорный преобразователь, и измеренный реальный угол управления, с которым открылся очередной тиристор преобразователя.
513
ключенного к тиристорному преобразователю, в режиме прерывистых токов, при котором определяют моменты времени достижения током максимального значения на интервале проводимости тиристорного преобразователя, измеряют максимальное значение тока, по нему определяют величину падения напряжения на активном сопротивлении якор- ной цепи, алгебраически суммируют полученный результат с величиной мгновенного значения электродвижущей силы тиристорного преобразователя, определяя величину ЭДС двигателя, и изменяют ток якорной цепи в соответствии с величиной и знаком рассогласования действительного и заданного значений скорости .двигателя, воздействуя на величину угла управления тиристорами преобразователя, отличающийся тем, что, с целью повьщ1ения точности регулирования, для каждого интервала проводимости последовательно измеряют и запоминают мгновенные амплитудные значения напряжения сети переменного тока к которой подключен тиристорный преобразователь, измеряют и запоминают величину реального,угла управления очередного тиристора преобразователя по величине реального угла управления на текущем интервале проводимости вычисляют значение максимального тока якорной цепи, соответствующего граничному режиму, и находят величину фазового сдвига между началом интервала проводимости и моментом достижения током в граничном режиме максимального значения на интервале, определяют отнощение максимальных значений токов, измеренного в прерывистом режиме и вычисленного для граничного режима, по нему определяют изменение величины фазового сдвига между началом интервала проводимости и моментом достижения током максимального значения на интервале, и, используя запомненную величину амплитудного значения напряжения сети, соответствующего протеканию текущем интервале проводимости,вычисляют мгновенное значение ЭДС преобразователя по выражению
5
е(п U
где
««КС
е(п)
Makc
sin {e-fe:(n)-t-v(ri)(n)Jj , мгновенное значение ЭДС преобразователя на текущем п-м интервале, вычисленное для момента достижения током якорной цепи максимального значения; измеренное амплитудное значение напряжения источника переменного тока, к которому подключен ти- ристорный преобразователь (фазное - для нулевых схем, линейное - для мос- торых схем преобразователя) , соответствующее п-му интервалу проводимости; угол, равный 180° для однофазных схем, 150° - для трехфазной нулевой схемы и 120° - для трехфазной мостовой схемы преобразователя;
о/Сп) - реальный угол управления тиристорами преобразователя на текущем п-м интервале ;
е
) f(n)
величина сдвига между началом интервала проводимости и моментом достижения током якорной цепи максимального значения в граничном режиме - функция реального угла управления с/ на текущем п-м интервале;
0
1| (п)
,Г1мя|1с(п) 1
т-г г изменение
маис -П- J „„„„„„лг.
5
0
относительно граничного режима величины фазового сдвига между началом интервала проводимости и моментом достижения током граничного режима максимального значения на интервале проводимости значений токов измеренмсцис
(п)
ного I ленного I граничного режима п-м интервале.
г р. «««.1
и вычис,с(п) ДЛЯ
на
град
36
32
30
2В 26 Zf 22
20 о 20 40 60 80100120 fOISO о/, ff Фиг. 2
lift, 
| Решмин Б.И., Ямпольский Д.М | |||
| Проектирование и наладка систем подчиненного регулирования электроприводов | |||
| М.: Энергия, 1975, с | |||
| Переносная печь-плита | 1920 |
|
SU184A1 |
| Способ регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем | 1982 |
|
SU1020949A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
