Изобретение относится к электротехнике, в частности к автоматизированным электроприводам, и может быть применено в установках, требующих высоких динамических свойств при малых ошибках регулирования.
Цель изобретения - повышение точности регулирования.
На чертеже представлена схема электропривода.
Электропривод постоянного тока содерступает сигнал с выхода сумматора 8. Последний осуш,ествляет алгебраическое суммирование мгновенных значений напряжения на якоре электродвигателя I и сигнала, поступающего с выхода датчика 12 напряжения на добавочных полюсах 13 и компенсационной обмотки 14 электродвигателя 1 Этот сигнал в моменты времени, соответствующие поступлению импульсного сигнала Ut от датчика 11, пропорционален
жит электродвигатель 1, якорная обмотка Ю мгновенному значению падения напряжения которого подключена к тиристорному преоб-в активных сопротивлениях обмотки дополразователю 2, последовательно соединенные блок 3 задания, регулятор 4 скорости, регулятор 5 тока, система 6 импульсно-фазонительных полюсов 13 и компенсационной обмотке 14 электродвигателя 1, а, следовательно, он пропорционален также и мгнового управления, выход которой подключен к тиристорному преобразвателю 2, датчик 7 товенному значению падения напряжения в активном сопротивлении обмотки якоря. Сумка якоря электродвигателя 1, выход которого марный сигнал Uoc с выхода сумматора 8, подключен к второму входу регулятора 5 измеренный в момент поступления импульс- тока, сумматор 8, один вход которого сое-ного сигнала Ut, записывается в анало- динен с датчиком 9 напряжения, выходговое запоминающее устройство 10 и сохра- сумматора 8 подключен к одному входу 20 няет свое значение до следующего моменаналогового зэпоминающего устройства 10, к второму входу которого подключен датчик 11 времени достижения током якоря максимального значения, выход аналогового запоминающего устройства 10 соединен с вторым входом регулятора 4 скорости. Кроме того, электропривод содержит датчик 12 напряжения на дополнительных полюсах 13 и компенсационной обмотке 14 электродвигателя 1, выход которого подключен к второму входу сумматора 8.
Электропривод образом.
работает следующим
30
та измерения, соответствующего максимальному значению тока якоря на следующем интервале проводимости преобразователя 2.
Активное сопротивление обмотки дополнительных полюсов 13 и компенсационной обмотки 14, с которых подается напряжение на вход датчика 12 напряжения, в процессе работы электродвигателя изменяется практически по такому же закону, как и активное сопротивление якоря электродвигателя RH
Таким образом, предлагаемое устройство обеспечивает повышение точности регулирования за счет достоверного измерения дейРегулирование частоты вращения производится изменением тока якоря электродвигателя 1 в соответствии с величиной рас- -зс ствительного значения падения напряжения согласования между действительным и за-в активном сопротивлении якоря электродвиданным значениями токов. Действительноегателя с учетом имеющей место в процесзначение тока измеряют с помощью датчика 7 тока и п одают сигнал с выхода последнего на информационный вход регулятора
40
се эксплуатации температурной нестабильности этого сопротивления.
5 тока. Заданное значение трка на установочном входе регулятора 5 тока определяется величиной рассогласования действительного и заданного значений электродвижущей силы (пропорциональной частоте вращения двигателя), получаемых на выходе регулятора 4 скорости. Сигнал Uj с блока 3 задания, пропорциональный заданному значению ЭДС, подают на установочный вход регулятора 4 скорости, на информационный вход которого поступает сигнал Uoc пропорциональный действительному значению ЭДС электродвигателя, а, следовательно, и его частоте вращения. Для определения сигнала Uoc помощью датчика 11 определяют моменты времени, когда ток якоря достигает максимального значения на интервале проводимости преобразвателя 2, и в эти моменты подают импульсный сигнал Ut на вход аналогового запоминающего устройства 10, на второй вход которого по45
50
55
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, якорная обмотка которого подключена к тиристорному преобразователю, последовательно соединен ные блок задания, регулятор скорости, регулятор тока, система Импульсно-фазо- вого управления, выход которой подключен к тиристорному преобразователю, датчик тока якоря электродвигателя, выход которого подключен к второму входу регулятора тока, сумматор, один вход которого соединен с датчиком напряжения электродвигателя, выход сумматора подключен к одному входу аналогового запоминающего устройства, к второму входу которого подключен датчик времени достижения током якоря максимального значения, выход аналогового запоминающего устройства соединен с вторым входом регулятора скоступает сигнал с выхода сумматора 8. Последний осуш,ествляет алгебраическое суммирование мгновенных значений напряжения на якоре электродвигателя I и сигнала, поступающего с выхода датчика 12 напряжения на добавочных полюсах 13 и компенсационной обмотки 14 электродвигателя 1 Этот сигнал в моменты времени, соответствующие поступлению импульсного сигнала Ut от датчика 11, пропорционален
мгновенному значению падения напряжения в активных сопротивлениях обмотки дополнительных полюсов 13 и компенсационной обмотке 14 электродвигателя 1, а, следовательно, он пропорционален также и мгно
та измерения, соответствующего максимальному значению тока якоря на следующем интервале проводимости преобразователя 2.
Активное сопротивление обмотки дополнительных полюсов 13 и компенсационной обмотки 14, с которых подается напряжение на вход датчика 12 напряжения, в процессе работы электродвигателя изменяется практически по такому же закону, как и активное сопротивление якоря электродвигателя RH
Таким образом, предлагаемое устройство обеспечивает повышение точности регулирования за счет достоверного измерения действительного значения падения напряжения в активном сопротивлении якоря электродвигателя с учетом имеющей место в процессе эксплуатации температурной нестабильности этого сопротивления.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, якорная обмотка которого подключена к тиристорному преобразователю, последовательно соединен ные блок задания, регулятор скорости, регулятор тока, система Импульсно-фазо- вого управления, выход которой подключен к тиристорному преобразователю, датчик тока якоря электродвигателя, выход которого подключен к второму входу регулятора тока, сумматор, один вход которого соединен с датчиком напряжения электродвигателя, выход сумматора подключен к одному входу аналогового запоминающего устройства, к второму входу которого подключен датчик времени достижения током якоря максимального значения, выход аналогового запоминающего устройства соединен с вторым входом регулятора ско313092344
рости, отличающийся тем, что, с цельюных полюсах и компенсационной обмотке
повышения точности регулирования, в негоэлектродвигателя, выход которого подключен
введен датчик напряжения на дополнитель-к второму входу сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения электромагнитной постоянной времени якорной цепи электродвигателя постоянного тока | 1985 |
|
SU1307525A1 |
| Электропривод постоянного тока | 1985 |
|
SU1336184A1 |
| Способ управления коммутацией электродвигателя постоянного тока и устройство для его осуществления | 1984 |
|
SU1327259A1 |
| Устройство для двухзонного регулирования скорости | 1978 |
|
SU769694A2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1992 |
|
RU2046537C1 |
| Способ защиты обмотки якоря электродвигателя от перегрева и устройство для его осуществления | 1984 |
|
SU1279010A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ОБРАТНОЙ СВЯЗЬЮ ПО ЭДС | 2001 |
|
RU2211526C2 |
| Электропривод с ограничением динамических усилий в механизмах экскаватора | 1987 |
|
SU1582314A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| Электропривод | 1985 |
|
SU1277346A1 |
Изобретение относится к электротехнике и может быть применено в установках, требуюш,их высоких динамических свойств при малых ошибках регулирования. Повышение точности регулирования обеспечивается введением датчика 12 напряжения на дополнительных полюсах 13 и компенсационной обмотке 14, выход которого соединен с входом сумматора 8. В дашюм устройстве повышается достоверность измерения действительного значения падения напряжения на активном сопротивлении якоря электродвигателя 1 с учетом имеюшей место в процессе эксплуатации температурной нестабильности этого сопротивления. 1 ил. t СО о CD ОО 4 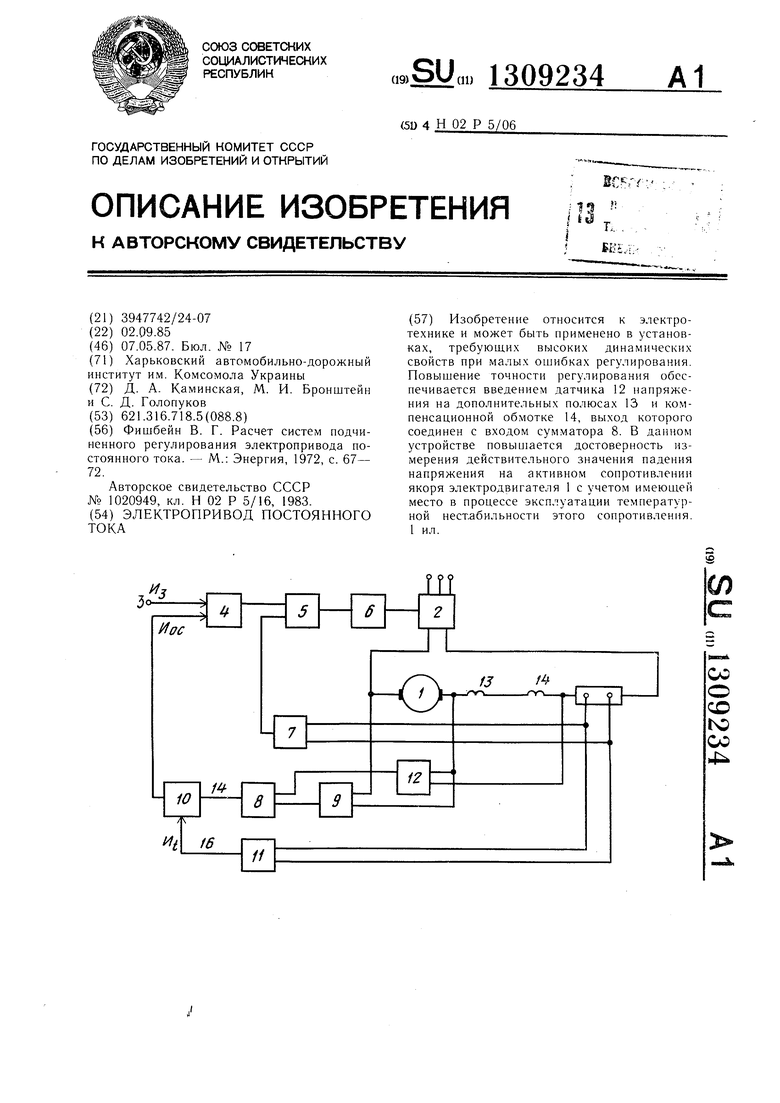
| Фишбейн В | |||
| Г | |||
| Расчет систем подчиненного регулирования электропривода постоянного тока | |||
| - М.: Энергия, 1972, с | |||
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
| Способ регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем | 1982 |
|
SU1020949A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
