Изобретение относится к тренировочным и лечебным устройствам и предназначено для активного развития мышц рук, ног, брюшного пресса, плечевого пояса и других групп мышц.
Известно устройство для тренировки мышц и разработки суставов, содержащее кинематическую схему и нагрузочное устройство, выполненное в виде упругих элементов и фрикционного тормоза.
Недостатками известного устройства являются сложность дозирования нагрузки, непостоянство нагрузки в различных фазах тренировочного движения, ограниченность применения.
Техническим результатом изобретения является возможность дозирования нагрузки из-за того, что в устройстве для тренировки мышц, состоящем из исполнительного органа, соединенного через кинематическую схему с нагрузочным устройством, нагрузочное устройство содержит электродвигатель, вал которого механически соединен с кинематической схемой, последовательно включенные задатчик скорости, первый узел электрических сигналов, регулятор скорости, задатчик нагрузки, второй узел сравнения электрических сигналов, регулятор нагрузки, управляемый преобразователь, а также датчик нагрузки, датчик скорости, датчик положения исполнительного органа и индикатор нагрузки, при этом исполнительный орган через датчик положения соединен с вторыми входами регуляторов скорости и нагрузки, второй вход первого узла сравнения электрических сигналов соединен через датчик скорости с валом электродвигателя, выход датчика нагрузки подключен к индикатору нагрузки и к второму входу второго узла сравнения электрических сигналов, а выход управляемого преобразователя соединен с электродвигателем.
Применение предлагаемого устройства позволяет повысить эффективность тренировочного процесса за счет высокой степени универсальности устройства и возможности создания постоянного по величине усилия (нагрузки) в каждой фазе выполняемого тренировочного движения, обеспечить быстрое и плавное изменение нагрузки как в процессе выполнения нескольких движений в одном подходе, так и от подхода к подходу, обеспечить создание как усилия, противодействующего выполняемому тренировочному движению, так и усилия, облегчающего выполнение движения, что необходимо при реабилитационных процессах.
На фиг. 1 представлена структурная схема устройства для тренировки мышц; на фиг. 2 кинематическая схема устройства, вариант реализации; на фиг. 3-6 схемы выполнения упражнений с использованием предлагаемого устройства; на фиг. 7 электрическая схема устройства; на фиг. 8 конструкция датчика положения исполнительного органа.
Устройство (фиг. 1) содержит задатчик 1 скорости, первый узел 2 сравнения электрических сигналов, регулятор 3 скорости, задатчик 4 нагрузки, второй узел 5 сравнения электрических сигналов, регулятор 6 нагрузки, управляемый преобразователь 7, электродвигатель 8, кинематическую схему 9, исполнительный орган 10, датчик 11 нагрузки, датчик 12 положения исполнительного органа 10, датчик 13 скорости, индикатор 14 нагрузки. Задатчик 1 скорости через последовательно включенные первый узел 2 сравнения электрических сигналов, регулятор 3 скорости, задатчик 4 нагрузки, второй узел 5 сравнения электрических сигналов, регулятор 6 нагрузки и управляемый преобразователь 7 соединен с электродвигателем 8. Второй вход первого узла 2 сравнения электрических сигналов соединен через датчик 13 скорости с валом электродвигателя 8. Вторые входы регулятора 3 скорости и регулятора 6 нагрузки соединены через датчик 12 положения с исполнительным органом 10. Выход датчика 11 нагрузки подключен к индикатору 14 нагрузки и к второму входу второго узла 5 сравнения электрических сигналов.
Вал электродвигателя 8 соединен через зубчатые колеса 15, 16 с валом исполнительного органа 10, выполненного в виде дугообразного рычага. Электродвигатель 8 и вал дугообразного рычага смонтированы на основании 17, закрепленном на стойках 18 и платформе 19. Плечи дугообразного рычага 10 и стойки 18 выполнены в виде телескопических конструкций с возможностью изменения их длины. Установленная длина плеч дугообразного рычага 10 и стоек 18 фиксируется зажимными винтами 20.
Якорь 21 электродвигателя 8 подключен к реверсивному управляемому преобразователю 7, в качестве которого использован тиристорный преобразователь. Обмотка 22 возбуждения электродвигателя 8 подключена к независимому источнику постоянного тока. Регулятор 6 нагрузки, с выходом которого соединен вход управляемого преобразователя 7, и второй узел 5 сравнения электрических сигналов реализованы на операционном усилителе 23. Для придания регулятору 6 нагрузки требуемых статических и динамических свойств в цепь его обратной связи включены резистор 24 и конденсатор 25. Второй узел 5 сравнения электрических сигналов реализован на входе операционного усилителя 23 с помощью резисторов 26, 27. Через резистор 26 на инвертирующий вход операционного усилителя 23 поступает напряжение с задатчика 4 нагрузки. Последний выполнен в виде потенциометра. Кроме того, на инвертирующий вход операционного усилителя 23 через редуктор 27 поступает напряжение с датчика 11 нагрузки. Указанные сигналы вычитаются (отрицательная обратная связь). Известно, что величина момента электродвигателя постоянного тока независимого возбуждения пропорциональна току якоря. В связи с этим датчик 11 нагрузки выполнен в виде датчика тока. Измерение тока производится в питающей цепи переменного тока с помощью трансформатора тока 28 и выпрямителя 29. Выход датчика 11 нагрузки подключен также к индикатору 14 нагрузки, в качестве которого использован вольтметр. Регулятор 3 скорости и первый узел 2 сравнения электрических сигналов реализованы на операционном усилителе 30. Для придания требуемых статических и динамических характеристик регулятору 3 скорости в цепь его обратной связи включены резистор 31 и конденсатор 32. Сравниваемые напряжения задатчика 1 скорости и датчика 13 скорости поступают на инвертирующий вход операционного усилителя 30 через резисторы 33 и 34 соответственно. Задатчик 1 скорости выполнен в виде потенциометра 35, на который с помощью переключателя 36 подается разнополярное напряжение. Изменение полярности задаваемого напряжения обеспечивает изменение задаваемого направления вращения электродвигателя 8 и исполнительного органа 10. Датчик 13 скорости выполнен в виде тахогенератора постоянного тока. Датчик 12 положения исполнительного органа 10 для кинематический схемы (см. фиг. 2) содержит путевой выключатель (см. фиг. 8), корпус 38 которого закреплен на основании 17, диск 39, закрепленный на валу дугообразного рычага 10, кулачок 40, установленный на валу дугообразного рычага 10. При настройке устройства кулачок 40, установленный с возможностью поворота относительно вала дугообразного рычага 10, устанавливается в требуемое угловое положение и фиксируется зажимным винтом 41. Угловое положение кулачка 40 выбирается так, что в исходном положении исполнительного органа 10 (до начала выполнения упражнения) ролик 42 рычага 43 путевого выключателя находится в пазу кулачка 40. При этом контакты 37 конечного выключателя (фиг. 7) находятся в замкнутом состоянии.
Поясним принцип работы устройства на примере тренировки мышц брюшного пресса (см. фиг. 3).
Исходное положение спортсмена лежа на скамье, лицом вверх, ноги закреплены, тазобедренный сустав на уровне вала дугообразного рычага 10, рукоятки дугообразного рычага перед грудью. В исходном положении с датчика 12 положения исполнительного органа на вторые входы регулятора 3 скорости и регулятора 6 нагрузки поступает блокирующий сигнал, при этом напряжение, подаваемое через управляемый преобразователь 7 на электродвигатель 8, равно нулю. Электродвигатель 8 и исполнительный орган 10 находятся в расторможенном состоянии. Желаемая величина нагрузки устанавливается перед выполнением упражнения задатчиком 4 нагрузки. Величина и направление скорости исполнительного органа 10 задается задатчиком 1 скорости. Причем для создания нагрузочного усилия направление движения исполнительного органа задается противоположным направлению движения спортсмена в первой фазе тренировочного движения. После начала движения с датчика 12 положения исполнительного органа на регуляторы 3 и 6 скорости и нагрузки поступает деблокирующий сигнал, на электродвигатель 8 через управляемый преобразователь 7 подается напряжение, и на исполнительном органе возникает усилие (нагрузка), препятствующее выполнению движения. Если усилие, создаваемое спортсменом, недостаточно для преодоления усилия, развиваемого нагрузочным устройством, то исполнительный орган 10 будет вращаться в сторону исходного положения, и при его достижении нагрузка будет снята по сигналу, поступающему с датчика 12 положения исполнительного органа. Благодаря этому обеспечивается безопасность спортсмена. В нормальном режиме спортсмен преодолевает усилие, создаваемое нагрузочным устройством, и перемещает корпус из нижнего положения в верхнее. При обратном движении (опускание корпуса) дугообразный рычаг 10 стремится вернуться в исходное положение со скоростью, установленной задатчиком 1 скорости. На исполнительном органе 10 по-прежнему создается заданное усилие. Спортсмен, препятствуя этому усилию, опускает корпус со скоростью меньшей, чем заданная.
Характер нагрузки в описанном упражнении схож с нагрузкой при выполнении этого упражнения с отягощением. Однако здесь имеются и существенные отличия. При выполнении упражнения с отягощением величина нагрузки мышц брюшного пресса зависит от фазы движения: при горизонтальном положении корпуса величина нагрузки максимальна, а при вертикальном близка к нулю. В связи с этим для эффективной проработки мышц возникает необходимость в выполнении упражнения при различных исходных углах наклона туловища, что снижает эффективность тренировки. Важнейшим достоинством предлагаемого устройства является то, что при его использовании величина усилия (нагрузки) на тренируемую группу мышц во всех фазах движения остается постоянной, равной заданной, а заданная величина нагрузки может плавно регулироваться задатчиком 4 нагрузки. Кроме того, предлагаемое устройство предоставляет дополнительные возможности для тренировки на этапе реабилитации.
Поясним это на примере выполнения того же упражнения. Тренировка мышц брюшного пресса в этом случае осуществляется по схеме, описанной выше. Но рукоятка дугообразного рычага 10 находится за спиной (фиг. 4). Задатчиком 1 скорости задается направление движения дугообразного рычага 10, совпадающее с направлением подъема корпуса. В результате при выполнении упражнения нагрузочное устройство создает усилие, облегчающее выполнение движения. Как и в предыдущем случае, величина усилия устанавливается задатчиком 4 нагрузки.
Электрическая схема предлагаемого устройства работает следующим образом.
В исходном положении задатчиками 1 и 4 задаются соответственно скорость движения исполнительного органа 10 и нагрузка. При этом контакты 37 путевого выключателя замкнуты. Напряжение на выходах регуляторов 3, 6 скорости и нагрузки равно нулю и, как следствие, равно нулю напряжение на выходе управляемого преобразователя 7, поступающее на якорь 21 электродвигателя 8. Электромагнитный момент, создаваемый электродвигателем 8, равен нулю, исполнительный орган 10 находится в расторможенном состоянии. После начала движения кулачок 40 воздействует на ролик 42 путевого выключателя, и происходит поворот рычага 43 путевого выключателя. В результате его контакты 37 размыкаются и регуляторы 3, 6 скорости и нагрузки деблокируются. В случае, когда направление вращения электродвигателя 8 совпадает с заданным задатчиком 1 скорости, напряжения, поступающие на входы операционного усилителя 30 от задатчика 1 и датчика 13 скорости, имеют противоположные знаки и вычитаются (отрицательная обратная связь).
Для создания нагрузочного усилия направление вращения электродвигателя 8 задается так, что электродвигатель 8 стремится повернуть исполнительный орган 10 в направлении, противоположном направлению первой фазы тренировочного движения. Поэтому при выполнении первой фазы тренировочного движения, например подъеме туловища (см. фиг. 3), напряжения датчика 13 скорости и задатчика 1 скорости имеют одинаковый знак, т.е. складываются. Операционный усилитель 30 при этом входит в насыщение, и на его выходе устанавливается напряжение постоянной величины. Часть этого напряжения с помощью задатчика 4 нагрузки подается на вход операционного усилителя 23 через резистор 20. Кроме того, на этот же вход подается через резистор 27 сигнал противоположного знака датчика 11 нагрузки. Если величина напряжения датчика 11 нагрузки, пропорциональная фактической нагрузке, меньше заданной, пропорциональной величине напряжения с задатчика 4 нагрузки, то напряжение на выходе операционного усилителя 23 начинает возрастать. Увеличивается напряжение на выходе управляемого преобразователя 7, возрастает ток якоря 21 двигателя, а следовательно, и нагрузка на исполнительном органе 10. Этот процесс продолжается до тех пор, пока нагрузка не достигнет заданного значения.
В случае, если нагрузка превысит заданную, напряжение с датчика 11 нагрузки станет по модулю больше напряжения с задатчика 4 нагрузки. Напряжение на выходе операционного усилителя 23 и управляемого преобразователя 7 будет снижаться, что приведет к снижению тока якоря 21 электродвигателя 8 и, следовательно, к уменьшению нагрузки на исполнительном органе 10. Указанные процессы протекают в течение сотых долей секунды, т.е. фактически нагрузка на исполнительном органе 10 остается постоянной, равной заданной.
Во второй фазе тренировочного движения, например при опускании туловища (см. фиг. 3), нагрузочное устройство, как и в первой фазе, стремится вращать дугообразный рычаг 10 вниз с заданной скоростью, а спортсмен препятствует этому движению. При этом скорость движения исполнительного органа 10 оказывается меньше заданной и соответственно напряжение датчика 13 скорости по модулю меньше напряжения задатчика 1 скорости. Разность этих напряжений поступает на вход операционного усилителя 30, и последний по-прежнему находится в насыщении, а устройство работает в режиме стабилизации нагрузки.
После возвращения исполнительного органа 10 в исходное положение замыкаются контакты 37 путевого выключателя, регуляторы 3, 6 скорости и нагрузки блокируются, нагрузка снимается.
В случае реабилитационной тренировки направление движения задается задатчиком 1 скорости так, что электродвигатель 8 стремится повернуть исполнительный орган 10 в том же направлении, в котором выполняет движение тренирующийся в первой фазе движения (например, подъем туловища на фиг. 4). Тренировочное движение в этом случае выполняется со скоростью, меньшей заданной. Поэтому напряжение с датчика 13 скорости по модулю меньше напряжения задатчика 1 скорости. Операционный усилитель 30 находится в насыщении, и нагрузочное устройство работает в режиме стабилизации усилия на исполнительном органе 10. Причем это усилие облегчает тренирующемуся выполнение движения. Во второй фазе движения (при опускании туловища на фиг. 4) направление движения исполнительного органа 10 меняется на противоположное и изменяется знак напряжения датчика 13 скорости. При этом операционный усилитель 30 по-прежнему находится в насыщении, а нагрузочное устройство создает постоянное усилие, поддерживающее корпус тренирующегося.
Тренировка мышц брюшного пресса с помощью предлагаемого устройства может осуществляться и по другой схеме (см. фиг. 5).
Спортсмен лежит на скамье лицом вверх, ось вращения дугообразного рычага 10 совпадает с тазобедренным суставом, тренирующийся осуществляет подъем и опускание ног. Схема выполнения упражнения для тренировки бицепсов с помощью предлагаемого устройства показана на фиг. 6. Исходное положение: стоя или сидя на скамье, руки опущены, ось вращения дугообразного рычага 10 совпадает с локтевым суставом. Задатчиком 1 скорости задается направление вращения исполнительного органа 10, противоположное направлению движения рук спортсмена в первой фазе движения (при сгибании рук). После начала движения с помощью нагрузочного устройства на исполнительном органе 10 создается усилие, препятствующее повороту дугообразного рычага вверх к груди спортсмена. Величина усилия устанавливается задатчиком 4 нагрузки и остается постоянной во всех фазах выполнения упражнения. Благодаря этому обеспечивается эффективная проработка тренируемых мышц.
Как известно, при выполнении этого упражнения с отягощением или с устройством блочного типа для достижения полноценной нагрузки необходимо выполнять упражнение с различными исходными углами наклона плечевого сустава. С помощью предлагаемого устройства аналогично выполняются упражнения для развития многих других мышц, например: а) для тренировки мышц разгибателей ног. Исходное положение: сидя на скамье, ноги опущены, дугообразный рычаг перед стопами, ось вращения дугообразного рычага 10 совпадает с коленным суставом. Выпрямление ног; б) для тренировки мышц задней поверхности бедра. Исходное положение: лежа на скамье лицом вниз, дугообразные рычаг над стопами, его ось вращения совпадает с коленным суставом. Сгибание ног; в) для тренировки мышц спины. Исходное положение: стоя в наклоне, рукоятка дугообразного рычага на спине, ось вращения дугообразного рычага совпадает с тазобедренным суставом. Выпрямление туловища; г) для тренировки мышц плечевого пояса. Исходное положение: стоя, руки опущены, кисти рук на рукоятке дугообразного рычага. Подъем рук вперед-вверх.
Во всех упражнениях требуемое положение оси вращения дугообразного рычага устанавливается регулированием длины стоек 18 и длины плеч дугообразного рычага 10.
С помощью известных устройств не удается обеспечить постоянство нагрузки во всех фазах выполнения тренировочного движения. Между тем суставы человеческого тела работают по принципу рычага и для эффективной тренировки приводящих мышц необходимо обеспечить постоянство нагрузки (момента) на рычаге во всех фазах тренировочного движения. Именно такой характер нагрузки обеспечивает предлагаемое устройство.
Предлагаемое устройство может быть эффективно использовано и при других вариантах выполнения кинематической схемы и исполнительного органа.
В качестве примеров укажем велотренажер и беговую дорожку. В велотренажере исполнительный орган 10 выполняется в виде педалей, а кинематическая схема 8 содержит, например, зубчатые колеса и цепь, соединяющие исполнительный орган с валом электродвигателя 8. При тренировке на велотренажере целесообразно датчиком 1 скорости задавать нулевую скорость. Требуемая нагрузка устанавливается задатчиком 1 нагрузки. В процессе тренировки желаемая величина нагрузки может быть легко изменена задатчиком 4 нагрузки. Существенно, что в этом случае механическая энергия преобразуется в электрическую, и отдается в питающую сеть. Аналогично может быть обеспечена генерация электрической энергии при выполнении кинематической схемы и исполнительного органа в виде беговой дорожки. В этом случае также возможны различные варианты тренировочной нагрузки. Например, может быть задана нулевая скорость движения исполнительного органа 10. После начала движения операционный усилитель 30 входит в насыщение под действием напряжения датчика скорости 13, и устройство стабилизирует нагрузку на исполнительном органе 10. Существенно, что в этом случае электродвигатель 8 работает в генераторном режиме и отдает через управляемый преобразователь 7 электроэнергию в питающую сеть. Возможно также задание положительной или отрицательной скорости движения (например беговой дорожки), что позволяет имитировать бег под уклон или бег в гору. В этих вариантах кинематической схемы устройства датчик положения исполнительного органа 12 может быть исключен из схемы устройства.
Таким образом, предлагаемое устройство позволяет при его использовании обеспечить эффективный тренировочный процесс и регулировать в широких пределах тренировочную нагрузку. Устройство обеспечивает повышенную безопасность спортсмена благодаря автоматическому снятию нагрузки при возвращении исполнительного органа в исходное положение. При использовании устройства может быть обеспечена отдача электрической энергии в питающую сеть.
При использовании устройства действительная величина нагрузки контролируется по индикатору нагрузки.
Учитывая, что предлагаемое устройство обеспечивает создание и регулирование нагрузки без использования силы тяжести, а также генерацию электрической энергии, оно может быть эффективно использовано и для тренировки космонавтов в условиях невесомости.
Отдельные блоки и узлы устройства реализованы по известным схемам. Так, управляемый преобразователь может быть выполнен в виде реверсивного тиристорного или транзисторного преобразователя. При этом, учитывая невысокие требования к статическим и динамическим характеристикам, могут быть использованы простейшие схемы, в том числе релейные. Наряду с двигателем постоянного тока могут быть использованы и машины переменного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОРТИВНЫЙ ТРЕНАЖЕР | 1994 |
|
RU2128072C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2014 |
|
RU2556540C1 |
| СПОСОБ МЕХАНИЧЕСКОЙ ОБРАБОТКИ НЕЖЕСТКИХ ОСЕСИММЕТРИЧНЫХ ДЕТАЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2130360C1 |
| НАГРУЗОЧНОЕ УСТРОЙСТВО ТРЕНАЖЕРА (Варианты) | 2016 |
|
RU2619557C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ШТАНГИ И БИОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ ТЯЖЕЛОАТЛЕТА | 2008 |
|
RU2403937C2 |
| НАГРУЗОЧНОЕ УСТРОЙСТВО ТРЕНАЖЕРА (ВАРИАНТЫ) | 2016 |
|
RU2673422C2 |
| Устройство для тренировки гимнастов | 1987 |
|
SU1574229A1 |
| УСТРОЙСТВО ДЛЯ РАЗВИТИЯ ПРЫЖКОВОЙ СИЛЫ СПОРТСМЕНОВ | 2001 |
|
RU2201781C2 |
| "Способ И.В.Попова тренировки спортсменов и устройство для его осуществления"." | 1989 |
|
SU1777920A1 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ КОММУТАЦИИ КОЛЛЕКТОРНЫХ ЭЛЕКТРИЧЕСКИХ МАШИН | 1994 |
|
RU2119223C1 |







Сущность изобретения: устройство содержит исполнительный орган 10, электродвигатель 8, кинематическую схему 9, задатчик 13 скорости, два узла 5 и 2 сравнения электрических сигналов, регулятор 3 скорости, задатчик 4 нагрузки, регулятор 6 нагрузки, управляемый преобразователь 7, датчик 11 нагрузки датчик 13 скорости, датчик 12 положения, индикатор 14 нагрузки. 1-2-3-4-5-6-7-8-9-10, 10-12-6, 12-3, 8-13-2, 11-14, 11-5. 8 ил.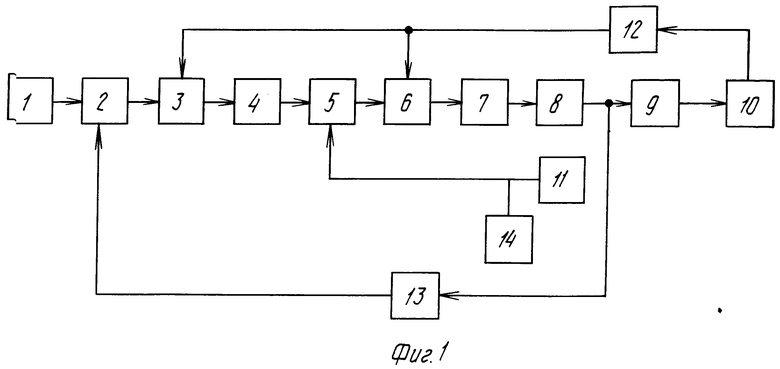
УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ, содержащее исполнительный орган, соединенный через кинематическую схему с нагрузочным устройством, отличающееся тем, что в него дополнительно введены датчик нагрузки, индикатор нагрузки, датчики скорости и положения исполнительного органа, а также последовательно соединенные задатчик скорости, первый узел сравнения электрических сигналов, регулятор скорости, задатчик нагрузки, второй узел сравнения электрических сигналов, регулятор нагрузки, управляемый преобразователь, при этом датчик положения соединен с вторыми входами регуляторов скорости и нагрузки, второй вход первого узла сравнения электрических сигналов соединен с датчиком скорости, выход датчика нагрузки подключен к индикатору нагрузки и к второму входу второго узла сравнения электрических сигналов, а выход управляемого преобразователя соединен с нагрузочным устройством, выполненным в виде электродвигателя.
| Устройство для тренировки мышц и разработки суставов | 1985 |
|
SU1258442A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
