Изобретение относится к оптоэлектронике, может быть использовано в системах наведения, ориентации, сканирования лазерных пучков для высокоточного определения и ориентации их на объекты.
Известен фотоэлектрический датчик круговых перемещений, описанный в книге М. Мухитдинова, Э.С.Мусаева "Светоизлучающие диоды и их применение", М. "Радио и связь", 1988 г. с.31-32, рис.2.14, состоящий из светодиода, конденсатора, лимба с нанесенными на него двумя растровыми дорожками, двух объективов, трех призм, трех линз, двух светодиодов и двух фотоприемников и основанный на нониусном методе считывания информации, полученной в результате преобразования малых перемещений в требуемый дискрет, который может быть реализован с помощью фотоэлектрических устройств.
В приведенном устройстве один участок лимба, штрихи одной растровой дорожки, на котором сдвинуты относительно другой на 1/4 шага, проецируется на другой.
Устройство обеспечивает достаточно высокую точность преобразования перемещений в требуемый дискрет. Однако ему присущи недостатки, Во-первых, для обеспечения высокой точности необходимо создавать высокоточные растровые дорожки со стабильным шагом (до долей микрон), что весьма сложно и дорого. Во-вторых, это обстоятельство ведет к снижению оперативности.
Таким образом, датчики перемещений, основанные на нониусном методе считывания информации, и, в частности, вышеприведенный, находят ограниченное применение в связи с дорогой стоимостью и необходимостью обеспечения сложной технологии нанесения на них растровых дорожек.
Известен датчик углового положения вращения, описанный по заявке ФРГ N 3635107, G 01 B 11/26, 1987 г. основанный на измерении энергии лучистого потока, подающего на светочувствительный элемент со светочувствительными участками определенной формы, являющейся предварительно заданной функцией угла поворота вращения объекта, и состоящий из неподвижного излучателя света, экранирующий пластинки с отверстием, вращающейся вместе с объектом, светочувствительной пластины со светочувствительным участком определенной формы, и схемы обработки.
В датчике выходной сигнал, снимаемый со светочувствительной пластины, является предварительно заданной функцией угла поворота вращающегося объекта.
Достоинство этого участка заключается в более простой реализации. Недостатком является низкая точность измерения из-за зависимости результата от фона, от погрешности формы маски (светочувствительного участка), погрешности от неравномерности чувствительности по площадке.
Из известных устройств наиболее близким по технической сущности является фотоэлектрический датчик перемещений, описанный по а.с. N 579539, G 01 N 11/05, 1977 г. и состоящий из источника переменного напряжения, двух светодиодов, подключенных к источнику, двух фотодиодов, включенных последовательно согласно, а средняя точка их соединения подключена к заземленной шине источника, шторки с двумя прорезями между светодиодами и фотодиодами, двух усилителей постоянного тока (УПТ), подключенных входами ко вторым концам фотодиодов, и сумматора, подключенного к входам двух УПТ.
В рассматриваемом фотоэлектрическом датчике перемещений в каждом из УПТ выделяется сигнал пропорциональный поступившему из одного из светодиодов на соответствующий ему фотодиод через одну из прорезей в перемещаемой шторке, и далее эти два сигнала суммируются в нагрузке. И по результирующему сигналу определяется величина перемещения объекта, к которому прикреплена шторка.
Достоинство этого устройства заключается в достаточной простоте реализации и повышенной точности измерения.
Недостаток устройства заключается в недостаточной точности измерения в широком диапазоне перемещений (отклонений объекта от линии наведения) в связи с ограничением ее величиной диаметров отверстий в шторке: высокая точность обеспечивается малым диаметром отверстия, однако при малом отверстии резко снижается динамический диапазон входных сигналов, а высокая точность нужна как раз на краю диапазона (в широких пределах диапазона перемещений).
Целью изобретения является повышение точности измерения.
Поставленная цель достигается тем, что, в фотоэлектрический датчик перемещений объекта, содержащий источник напряжения, два светодиода, первый из которых подключен к первому выходу источника напряжения, фотодиод, шторку с двумя отверстиями между светодиодами и фотодиодом, закрепленную на объекте, сумматор и усилитель постоянного тока (УПТ), дополнительно введены модулятор, разветвитель, полосовой фильтр, фильтр низких частот, синхронный детектор, схема сравнения, компаратор, электронный ключ, формирователь управляющего напряжения и запоминающий элемент, при этом усилитель постоянного тока выполнен дифференциальным, а фотодиод квадрантным, оптическая ось первого светодиода съюстирована через первое отверстие в шторке с границей между парой нижних квадрантов фотодиода, а оптическая ось второго светодиода съюстирована через второе отверстие в шторке с границей между парой верхних квадрантов фотодиода, левые и правые квадранты фотодиода попарно соединены по электрическим выходам и подключены к соответствующему из входов дифференциального УПТ, разветвитель соединен по входу с выходом дифференциального УПТ, первым выходом через последовательно соединенные полосовой фильтр и синхронный детектор с первыми входами сумматора и схемы сравнения, а вторым выходом через фильтр низких частот со вторыми входами сумматора и схемы сравнения, подключенной через последовательно соединенные формирователь управляющего напряжения, электронный ключ и запоминающий элемент ко входу коррекции УПТ, компаратор включен между выходом синхронного детектора и управляющим входом электронного ключа, модулятор связан по входу со вторым выходом источника напряжения, по первому выходу со вторым светодиодом, а по второму выходу со вторым входом синхронного детектора, причем оси отверстий в шторке лежат в плоскости, перпендикулярной направлению перемещения на расстоянии, равном осевому смещению светодиодов, диаметры отверстий различны и удовлетворяют условию:
D K˙d, где D диаметр первого отверстия;
d диаметр второго отверстия;
K коэффициент повышения точности измерения в пределах зоны перемещения, равной d.
Отличительными признаками предлагаемого технического решения являются выполнение усилителя постоянного тока дифференциальным, а фотодиода квадрантным, левые и правые квадранты которого попарно соединены по электрическим выходам и подключены к соответствующему из входов дифференциального УПТ, граница между парой нижних квадрантов которого съюстирована через первое отверстие с диаметром D в шторке с оптической осью первого светодиода, а граница между парой верхних квадрантов съюстирована через второе отверстие с диаметром d с оптической осью второго светодиода, а также расположение отверстий в шторке в плоскости, перпендикулярной направлению перемещения на расстоянии, равном осевому смещению светодиодов, и выполнение отверстий различными по диаметру: D K˙d и введение модулятора, разветвителя, полосового фильтра, фильтра низких частот, синхронного детектора, схемы сравнения, компаратора, электронного ключа, формирователя управляющего напряжения и запоминающего элемента с их связями.
Выполнение усилителя постоянного тока дифференциальным, а фотодиода квадрантным известно, однако, в данном случае относится к отличительным признакам, т. к. при выполнении их в другом виде не обеспечится работоспособность устройства и достижение поставленной авторами цели.
Выполнение фотодиода квадрантным с вышеописанными связями обеспечивает объединение на одной подложке светочувствительных элементов, что уменьшает разброс параметров во времени и от температурных уходов. Это позволяет минимизировать расстояние между квадрантами и сделать диаметр малого отверстия d равным 1,5-42 ширины границы между квадрантами (чего нельзя достичь при использовании дискретных элементов) и тем самым повысить К, т.е. точность измерения и динамической диапазон.
Выполнение УПТ дифференциальным обеспечивает объединение обработки каналов грубого и тонкого измерения, что повышает точность измерения.
Расположение отверстий в шторке в плоскости, перпендикулярной направлению перемещения, на расстоянии, равном осевому смещению светодиодов, обеспечивает оптическую связь светодиода с соответствующими границами между квадрантами фотодиода и, тем самым, привязку точностных и динамических характеристик точного и грубого каналов измерения к объему в процессе его перемещения.
Различия диаметров отверстий обеспечивает достижение сочетания высокой точности измерения в широком динамическом диапазоне.
Модулятор предназначен для различения сигналов грубого и точного каналов и для устранения восприимчивости к паразитным засветкам, влияющим на слабые сигналы.
Разветвитель необходим для разделения двух каналов обработки.
Полосовой фильтр служит для выделения сигнала модуляции точного канала и повышения помехозащищенности от паразитных засветок, а фильтр низких частот для выделения постоянной составляющей (информации с грубого канала измерения).
Синхронный детектор необходим для выделения и усиления сигналов малой амплитуды на уровне шумов.
Схема сравнения, коллиматор, формирователь управляющего напряжения, электронный ключ и запоминающий элемент с их связями обеспечивают предварительную коррекцию усиления фотоприемной и усилительной части датчика.
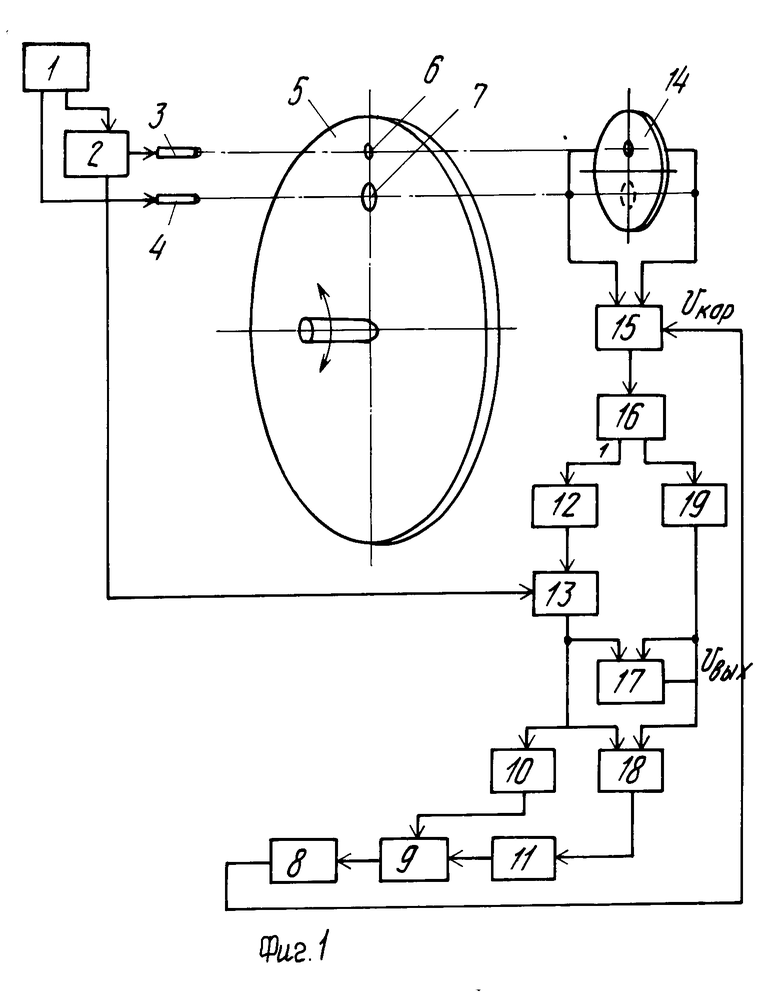
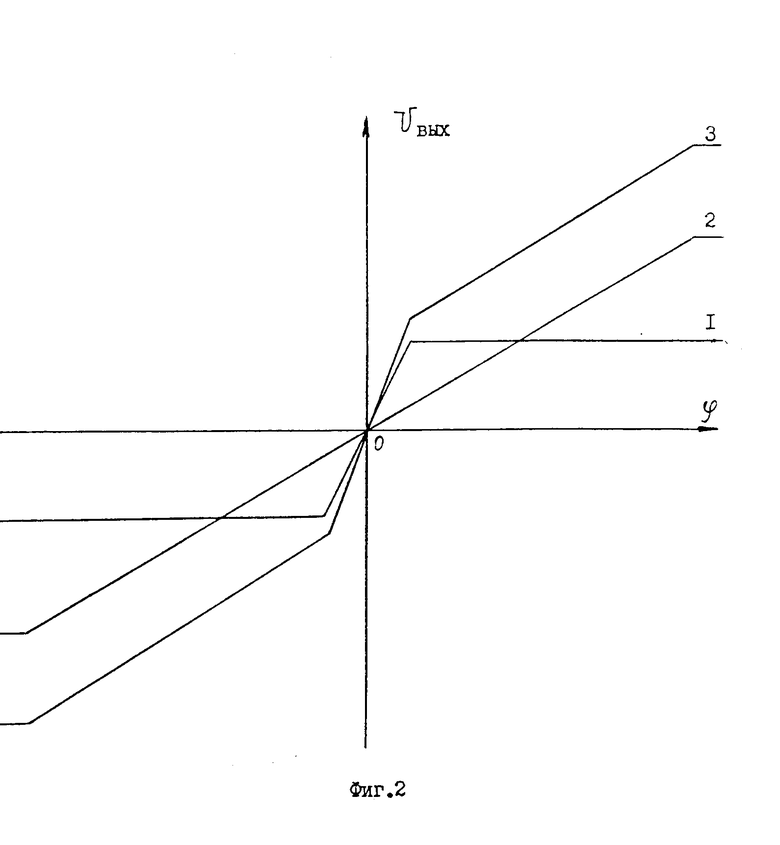
Блок-схема предлагаемого фотоэлектрического датчика перемещений объекта приведена на фиг. 1, а его регулировочная характеристика Vвых f(ϕ), представляющая зависимость напряжения на выходе датчика от углового смещения объекта относительно оси визирования на фиг.2.
Фотоэлектрический датчик состоит из источника I напряжения; модулятора 2, представляющего собой, например, управляемый мультивибратором, схема которого приведена в книге В.Д.Шило "Популярные цифровые микросхемы", М. "Металлургия", 1988 г. с. 188, рис.1.136 и подключенным входом к первому выходу источника I напряжения, генератор тока на частоту Fм, показанный на схеме рис.1.8 в,г, с.11 в книге М.Мухитдинова, Э.С.Мусаева "Светоизлучающие диоды и их применение", М. "Радио и связь", 1988. второго светодиода 3, подключенного к первому выходу модулятора 2 (рис.1.8 в,н в книге М.Мухитдинова, Э.С.Мусаева "Светоизлучающие диоды и их применение"); первого светодиода 4, подключенного по второму выходу источника I напряжения (фиг.1 8а, рис.11 в книге М.Мухитдинова, Э.С.Мусаева); шторки 5, закрепляемой на объекте, перемещения которого надо определить, с двумя отверстиями 7 с диаметром Д и 6 с диаметром d, лежащими в плоскости, перпендикулярной направлению перемещения, на расстоянии, равном осевому смещению светодиодов 3 и 4, причем D >> d, представляющей собой диск при определении угловых перемещений объекта (как показано на фиг.1) или прямоугольную пластину при определении линейных перемещений; запоминающего элемента 8, в качестве которого может быть использован управляемый стабилизатор напряжения; электронного ключа 9, подключенного выходом ко входу запоминающего элемента 8 и выполненного, например, на транзисторе в ключевом режиме; компаратора 10, подключенного выходом к управляющему входу ключа 9; формирователя управляющего напряжения 11, подключенного выходом ко входу электронного ключа 9 и выполненного, например в виде генератора линейно изменяющегося напряжения; последовательно соединенных полосового фильтра 12 и синхронного детектора 13, связанного вторым входом со вторым выходом модулятора 2; квадрантного фотодиода 14, граница между парой верхних квадрантов которого съюстирована через отверстие 6 в шторке с осью светодиода 3, а граница между парой нижних квадрантов съюстирована через отверстие 7 с осью светодиода 4; дифференциального УПТ 15, к первому входу которого подключена пара левых, а ко второму пара правых квадрантов фотодиода 14, а вход коррекции связан с выходом запоминающего элемента 8; разветвителя 16, подключенного входом к выходу УАТ 15 и представляющего собой, например двухканальный усилитель с объединенными входами для развязки по входу фильтров полосового 12 и низких частот 19, подключенных к его выходам; сумматора 17, связанного первым входом с выходом синхронного детектора 13, ко второму входу которого подключен второй выход модулятора 2, и входом компаратора 10 и выполненного, например, по схеме неинвертирующего сумматора, приведенной в книге А.Г.Алексеенко "Основы микросхемотехники", М. "Советское радио", 1977 г. с.261, выходной сигнал с которого дает информацию в данном случае о рассогласовании объекта по углу относительно оси визирования, которая совмещена с вертикальной границей между квадрантами фотодиода 14, схемы 18 сравнения, представляющей собой, например УПТ с дифференциальным входом, подключенной параллельно входам сумматора 17, а выходом связанной со входом формирователя 11 управляющего напряжения; фильтра 19 низких частот, включенного между вторым выходом разветвителя 16 и соединенными вторыми входами сумматора 17 и схемы 18 сравнения.
Устройство работает следующим образом. В нем предусмотрены авторами два канала подстройки смещения объекта по углу относительной оси визирования, канал грубый и канал точный. Грубый канал включает светодиод 4, отверстие 7 с диаметром D в шторке, пару нижних квадрантов фотодиода 14, УПТ 15, разветвитель 16, фильтр 19 низких частот и сумматор 17. Точный канал содержит модулятор, светодиод 3, отверстие 6, пару верхних квадрантов фотодиодов 14 УАТ 15, разветвитель 16, полосовой фильтр 12, синхронный детектор 13 и сумматор 17. Канал грубой подстройки реагирует на большее смещение светового пятна по площадке фотодиода, а точный на меньшее.
Перед получением информации с сумматора 17 о степени рассогласования по углу объекта относительно оси визирования Vвых f(ϕ) согласно кривой 3 (фиг. 2) осуществляется процесс балансировки приемно-усилительного тракта датчика путем настройки грубого канала тракта по точному с целью исключения погрешности из-за различной чувствительности квадрантов фотодиода, а также из-за несоосности отверстий, вносимой в процесс более точной установки по углу смещения объекта относительно оси визирования.
Приемоусилительный тракт датчика перемещений является сбалансированным, когда сигнал на выходе УПТ 15 равен 0, т.е. световой отклик левой и правой пар квадрантов фотодиода 14 одинаков. В противном случае выходной сигнал УАТ 15 отличен от 0 и через разветвитель 16 поступает в зависимости от его спектрального состава на фильтры 12 или 19, откуда на входы схемы 19 сравнения и на вход компаратора 10. На выходе схемы 18 сравнения выделяется сигнал, пропорциональный разности сигналов на его входах, с соответствующим знаком, под влиянием которого в формирователе 11 начинается нарастание или спад формируемого напряжения (в зависимости от полярности сигнала на входе).
При наличии сигнала на входе компаратора 10 происходит замыкание электронного ключа 9 и сформированное напряжение с формирователя 11 поступает на запоминающий элемент 8, который выставляет требуемый уровень корректирующего напряжения Vкор на УПТ 15 и запоминает его. Под действием Vкор происходит изменение параметров схемы УАТ до появления на его выходе нуля, что служит командой на pазмыкание ключа и свидетельствует о сбалансированности приемоусилительного тракта датчика.
Затем приступают к процессу точной установки смещения объекта относительно оси визирования, за которую принимается граница между левыми и правыми квадрантами фотодиода 14.
Для этого излучение от двух светодиодов 3 (модулированное) и 4 (немодулированное) направляют через соответствующие отверстия в шторке 5, перемещаемой вместе с объектом по углу, на фотодиод 14, откуда продетектированный сигнал с пары левых квадрантов поступает на один вход УПТ 15, а сигнал с пары правых квадрантов на другой вход УПТ 15.
Сигнал с выхода УПТ 15, представляющий собой разность сигналов на его входах, через разветвитель 16 заводится на фильтры 12 и 19, где производится разделение по частоте: через 19 проходит сигнал, соответствующий светодиоду 4, отверстию 7 и двум нижним квадрантам фотодиода 14 (грубому каналу), а через фильтр 12. настроенный на полосу Fм±, проходит сигнал, соответствующий излучателю 3, излучающему промодулированный световой сигнал, отверстию 6 и двум верхним квадрантам фотодиода 14 (т.е. точному каналу). В синхронном детекторе 13 осуществляется выделение напряжения линейно зависящего от напряжения на его входе с фильтра 12, и подается на сумматор 17, на второй вход которого заводится сигнал с фильтра 19 низких частот. В сумматоре 17 происходит объединение входных сигналов и выделение выходного, по величине и знаку соответствующего его регулировочной характеристике (фиг.2). Т.е. в сумматоре происходит получение управляющего сигнала, величина и знак которого соответствует величине и направлению углового смешения объекта и шторки относительно оси визирования. Этот сигнал поступает далее, например на схему управления электропривода.
Рассмотрим частный случай работы датчика.
Положим, что пара левых квадрантов подключена к инвертирующему входу, а пара правых к неинвертирующему входу УПТ 15. Пусть, например, в процессе установки объекта на ось визирования, совпадающую с вертикальной границей деления фотодиодов 14, световые пятна на фотодиоде сместились правее этой границы. В результате сигнал на выходе УАТ 15 будет иметь положительную полярность. При этом величина этого сигнала при перемещении пятна в грубом канале от середины будет возрастать до момента перемещения всего пятна с левого квадранта на правый. Как только все пятно переместится, наступит насыщение и сигнал Vвых возрастать не будет. Аналогичная картина происходит в грубом канале при перемещении светового пятна справа налево (фиг.2 кривая 1). В точном канале картина будет аналогичной, только изменение Vвых будет происходить в меньших пределах и насыщение наступит раньше из-за меньшего диаметра пятна (фиг.2, кривая 2). Информация о смещении в грубом канале проходит через фильтр 19 низких частот, а информация о смещении в точном канале через полосовой фильтр 12 и синхронный детектор 13.
В результате суммирования крутизна зависимости Vвых. f(ϕ) всего датчика (фиг. 2, кривая 3) возрастает на участке, близком к началу координат, т.е. отклик на малые смещения объекта относительно оси визирования в пределах зоны перемещения d малого отверстия относительно нуля будет больше.
При этом повышение точности оценивается коэффициентом повышения точности измерения в пределах зоны перемещения, равной d, K=K  . К возрастает до того момента, пока d не станет равным ширине границы между левыми и правыми квадрантами, а D ограничено линейными размерами площадок квадрантных фотодиодов.
. К возрастает до того момента, пока d не станет равным ширине границы между левыми и правыми квадрантами, а D ограничено линейными размерами площадок квадрантных фотодиодов.
Взяв D равным 1,5 ширины границы и D 4 мм для серийно выпускаемого квадрантного фотодиода ФД-141К, получим
K 
 ≈ 13, т.е. совокупность рассмотренных мер позволяет повысить точность измерения с помощью предлагаемого фотоэлектрического датчика не менее чем на порядок.
≈ 13, т.е. совокупность рассмотренных мер позволяет повысить точность измерения с помощью предлагаемого фотоэлектрического датчика не менее чем на порядок.
Варьируя соотношение диаметров отверстий D и d, в зависимости от требований можно реализовать максимальную точность измерения (наиболее точно установить заданное смещение объекта относительно оси визирования) при исходном динамическом диапазоне или расширить динамический диапазон при исходной точности либо при соответствующих требованиях повысить то и другое.
Таким образом, предложенное авторами техническое решение имеет следующие преимущества по сравнению с известными:
при исходном динамическом диапазоне измерения перемещения увеличена точность измерения в К раз, где K=K 
повышена точность измерения в динамическом диапазоне, осуществлена стабилизация амплитудной характеристики за счет точной автоматической корректировки, устранен дрейф за счет использования дифференциального включения квадрантов фотодиода, резко снижены погрешности от разноканальности и нестабильности каналов за счет использования квадрантного фотодиода (все квадранты выполнены на одной подложке) и по одному светодиоду в каждом из каналов. За счет коррекции производится автоматическая привязка амплитудных характеристик точного и грубого каналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВРАЩЕНИЯ ОБЪЕКТА | 1989 |
|
RU2087915C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 1989 |
|
SU1841038A1 |
| КООРДИНАТОР | 1988 |
|
SU1841006A1 |
| Лазерный обнаружитель оптических сигналов | 2023 |
|
RU2816284C1 |
| Следящее устройство для бесконтактного измерения параметров углового движения объекта | 1988 |
|
SU1562702A1 |
| Фотоэлектрический автоколлиматор | 1987 |
|
SU1469345A1 |
| Фотоэлектрический датчик перемещений | 1975 |
|
SU579539A1 |
| КООРДИНАТОР | 1989 |
|
SU1841034A2 |
| ОПТИЧЕСКАЯ СИСТЕМА КООРДИНАТОРА | 1986 |
|
SU1841052A1 |
| ДВУХКООРДИНАТНЫЙ ЛАЗЕРНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1990 |
|
RU2026607C1 |
Изобретение относится к оптоэлектронике и может быть использовано в системах наведения, ориентации, сканирования лазерных пучков для высокоточного определения и ориентации их на объекты. Цель изобретения повышение точности измерения обеспечивается за счет осуществления стабилизации амплитудной характеристики за счет точной автоматической корректировки. Устранен дрейф за счет использования дифференциального включения квадрантов фотодиода. Снижены погрешности от разноканальности и нестабильности каналов за счет использования квадратного фотодиода и по одному светодиоду в каждом из каналов. За счет коррекции производится автоматическая привязка амплитудных характеристик точного и грубого каналов. 2 ил.
ФОТОЭЛЕКТРИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ ОБЪЕКТА, содержащий источник напряжения, два светодиода, один из которых соединен с первым выходом источника напряжения, фотодиод, шторку с двумя отверстиями, установленную между светодиодами и фотодиодом и предназначенную для соединения с объектом, сумматор и усилитель постоянного тока, отличающийся тем, что, с целью повышения точности, он снабжен модулятором, разветвителем, полосовым фильтром, фильтром низких частот, синхронным детектором, схемой сравнения, компаратором, электронным ключом, формирователем управляющего напряжения и запоминающим элементом, усилитель постоянного тока выполнен дифференциальным, а фотодиод - квандрантным, оптическая ось первого светодиода съюстирована через первое отверстие в шторке с границей между парой нижних квандрантов фотодиода, а оптическая ось второго светодиода съюстирована через второе отверстие в шторке с границей между парой верхних квандрантов фотодиода, левые и правые квандранты фотодиода попарно объединены и соединены с соответствующими входами дифференциального усилителя постоянного тока, первый вход разветвителя через последовательно соединенные полосовой фильтр и снхронный детектор соединен с первыми входами сумматора и схемы сравнения, а второй вход разветвителя через фильтр низких частот соединен с вторыми входами сумматора и схемы сравнения, соединенной через последовательно соединенные формирователь управляющего напряжения, электронный ключ и запоминающий элемент с входом коррекции усилителя постоянного тока, вход компаратора соединен с выходом синхронного детектора, а выход с управляющим входом электронного ключа, вход модулятора соединен с вторым выходом источника напряжения, первый выход с вторым светодиодом, а второй выход с вторым входом синхронного детектора, оси отверстий в шторке лежат в плоскости, перпендикулярной направлению перемещения, на расстоянии, равном осевому смещению светодиодов, а диаметры отверстий определяют из соотношения D K · d, где D диаметр первого отверстия, d диаметр второго отверстия, K коэффициент повышения точности измерения в пределах зоны перемещения, равной d.
| Фотоэлектрический датчик перемещений | 1975 |
|
SU579539A1 |
