Изобретение относится к измерительной технике и может быть исполь- зовано для контроля параметров углового перемещения объектов.
Целью изобретения является повышение точности и быстродействия измерений за счет устранения погрешнее- тей, связанных с динамической ошибкой слежения за перемещением объекта и с изменением параметров эпементов оптико-электронного преобразователя.
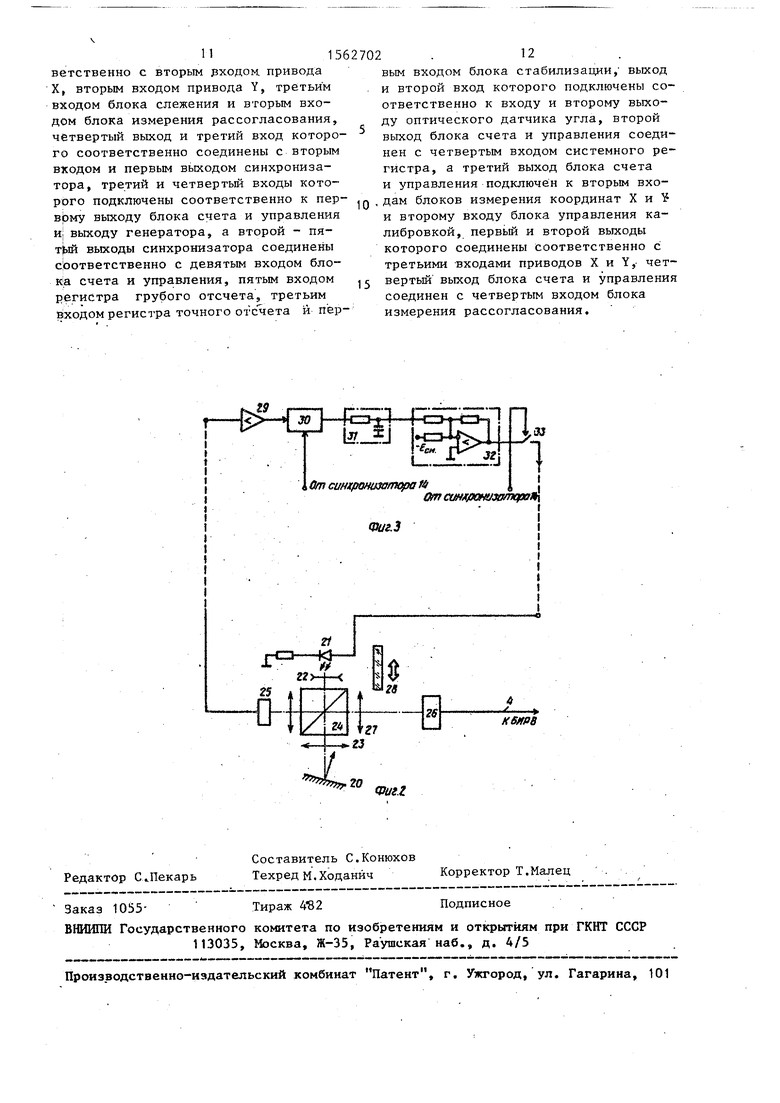
На фиг.1 приведена структурная схема устройства; на фиг.2 - структурная схема оптического датчика угла; на фиг.З - структурная схема блока стабилизации подсвета.
Устройство содержит оптический датчик 1 угла, привод 2 координаты X, блок 3 измерения координаты Хэ поворотную раму 4, жестко связанную с приводом 2 и блоком 3, привод 5 координаты Y, блок 6 измерения коорди- наты Y, привод 2 и блок 3 механически связаны с оптическим датчиком 1 угла, привод 5 и блок 6 механически связаны с поворотной рамой 4, блок 7 стабилизации подсвета, выход которого соединён с входом датчика 1, второй вход соединен с вторым выходом датчика- 1, блок 8 измерения рассогласования, первый вход которого соединен с первым выходом датчика 1, системный регистр 9, первый и второй выходы которого соединены соответственно с вторыми входами приводов 2 и 5, четвертый выход соединен с вторым входом блока 8, блок 10 смещения, первый вход которого соединен с первым выходом блока 8, третий вход соединен с третьим выходом регистре 9, первый , выход соединен с первым входом привода 2, второй выход соединен с первым входом привода 5, генератор 11, блок
12управления и вычислений, регистр
13грубого отсчета, первый, второй, третий и четвертый выходы которого соединены соответственно с третьим, четвертым, пятым и шестым входами блока t2, седьмой вход которого соединен с третьим выходом блока 3 и вторым входом регистра 9, восьмой вход соединен с третьим выходом блока 6 и третьим входом регистра 9, второй выход соединен с четвертым входом регистра 9, четвертый выход соединен с четвертым входом блока 8, третий и четвертый входы регистра 13 соединены соответственно с вторыми выходами блоков 3 и 6, синхронизатор 14, второй вход которого соединен с четвертым выходом блока 8, третий вход соединен с первым выходом блока 12, четвертый вход соединен с выходом генератора 11 и вторым входом блока 10, первый выход соединен с третьим входом блока 8, второй выход соединен с девятым входом блока 12, третий выход соединен с пятым входом регистра 13, пятый выход соединен с первым входом блока 7, регистр 15 точного отсчета, первый и второй выходы которого соединены соответственно с первым и вторым входами блока 12, третий вход соединен с четвертым выходом синхронизатора 14, первый и второй сумматоры 16 и.17, выходы которых соединены соответственно с первым и вторым входами регистра 15, первые входы соединены соответственно с вторым и третьим выходами блока 8, второй вход первого сумматора 16 соединен с первым выходом блока 3 и первым
входом регистра 13, второй вход второго сумматора 17 соединен с первым выходом блока 6 и вторым входом регистра 13, блок 18 управления калибровкой устройства для измерения параметров углового движения объекта 19 .с зеркалом 20, первый и второй выхо-, ды которого соединены соответственно с третьими входами приводов 2 и 5, второй вход соединен с третьим выходом блока 12 и вторыми входами блоков 3 и 6, пятый выход или шина данных блока 12 соединен с первыми входами блоков 3, 6 и 18, регистра 9 и синхронизатора, 14.
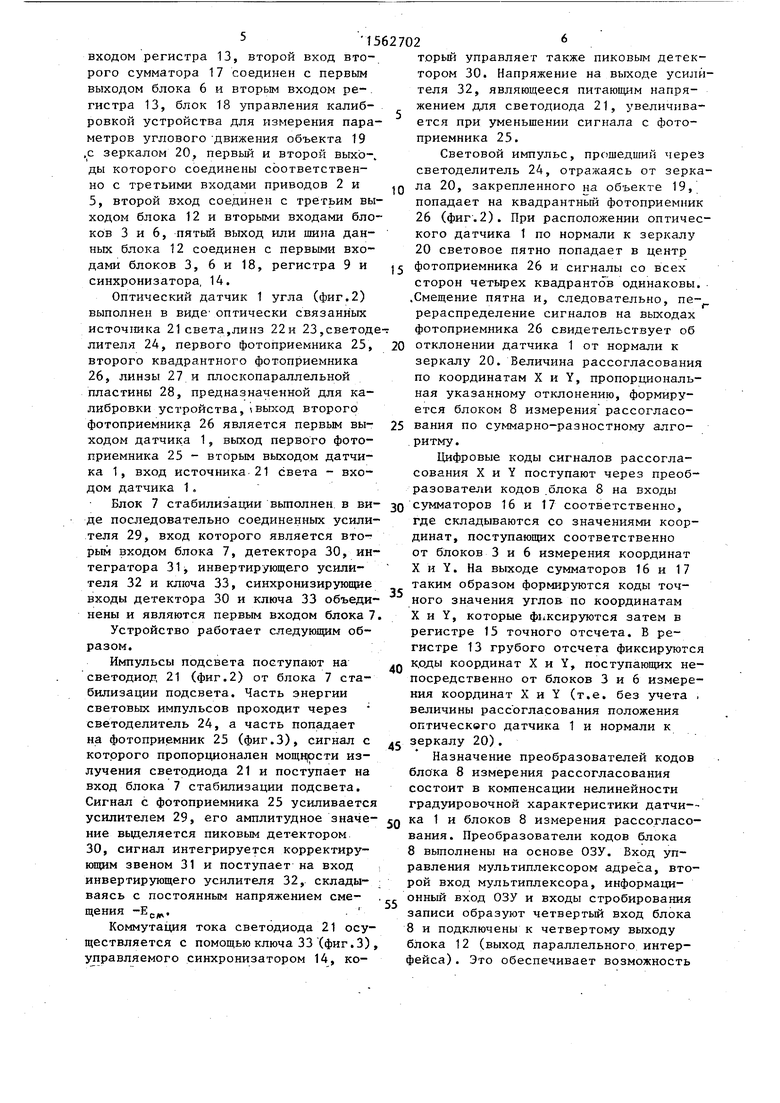
Оптический датчик 1 угла (фиг.2) выполнен в виде оптически связанных источника 21 света,линз 22и 23,светоде-г лителя 24, первого фотоприемника 25, второго квадрантного фотоприемника 26, линзы 27 и плоскопараллельной пластины 28, предназначенной для калибровки устройства,выход второго
торый управляет также пиковым детек тором 30. Напряжение на выходе усил теля 32, являющееся питающим напряжением для светодиода 21, увеличивается при уменьшении сигнала с фотоприемника 25.
Световой импульс, прошедший чере светоделитель 24, отражаясь от зерка
JQ ла 20, закрепленного на объекте 19, попадает на квадрантный фотоприемник 26 (фиг.2). При расположении оптичес кого датчика 1 по нормали к зеркалу 20 световое пятно попадает в центр
)5 фотоприемника 26 и сигналы со всех сторон четырех квадрантов одинаковы. .Смещение пятна и, следовательно, перераспределение сигналов на выходах фотоприемника 26 свидетельствует об
20 отклонении датчика 1 от нормали к зеркалу 20. Величина рассогласования по координатам X и Y, пропорциональная указанному отклонению, формируется блоком 8 измерения рассогласофотоприемника 26 является первым вы- 25 вания по суммарно-разностному алготорый управляет также пиковым детектором 30. Напряжение на выходе усилителя 32, являющееся питающим напряжением для светодиода 21, увеличивается при уменьшении сигнала с фотоприемника 25.
Световой импульс, прошедший через светоделитель 24, отражаясь от зеркала 20, закрепленного на объекте 19, попадает на квадрантный фотоприемник 26 (фиг.2). При расположении оптического датчика 1 по нормали к зеркалу 20 световое пятно попадает в центр
фотоприемника 26 и сигналы со всех сторон четырех квадрантов одинаковы. .Смещение пятна и, следовательно, перераспределение сигналов на выходах фотоприемника 26 свидетельствует об
0 отклонении датчика 1 от нормали к зеркалу 20. Величина рассогласования по координатам X и Y, пропорциональная указанному отклонению, формируется блоком 8 измерения рассогласо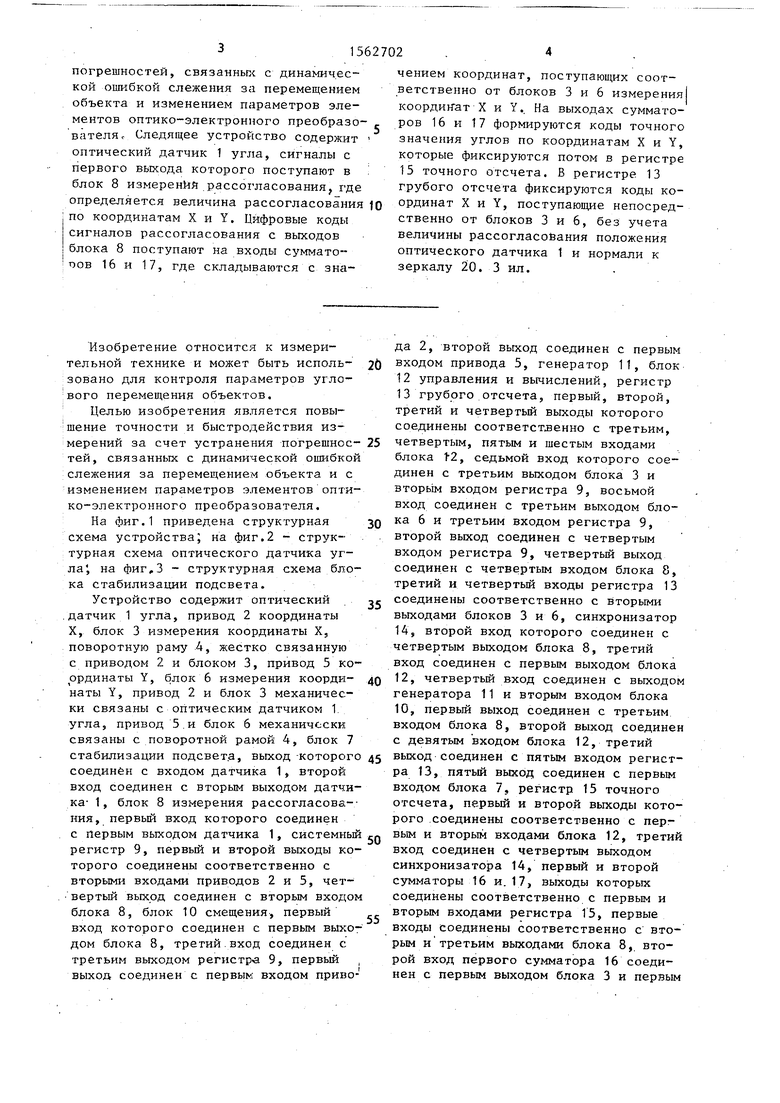
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания графической информации | 1982 |
|
SU1084835A1 |
| Устройство для считывания информации с печатных плат | 1982 |
|
SU1072072A1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |
| Тренажер операторов систем управления | 1983 |
|
SU1091212A1 |
| Устройство для отображения инфор-МАции HA эКРАНЕ элЕКТРОННО-лучЕВОйТРубКи | 1979 |
|
SU807364A1 |
| Устройство регистрации электрических сигналов на фотопленке | 1983 |
|
SU1173188A1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ СНАРЯДА ПО ОТРАЖЕННОМУ ОТ ЦЕЛИ ЧАСТОТНОМУ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2003 |
|
RU2231735C1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Устройство для отображения информацииНА эКРАНЕ ТЕлЕВизиОННОгО пРиЕМНиКА | 1979 |
|
SU842933A1 |
Изобретение относится к измерительной технике. Целью изобретения является повышение точности и быстродействия измерений за счет устранения погрешностей, связанных с динамической ошибкой слежения за перемещением объекта и изменением параметров элементов оптико-электронного преобразователя. Следящее устройство содержит оптический датчик 1 угла, сигналы с первого выхода которого поступают в блок 8 измерения рассогласования, где определяется величина рассогласования по координатам Х и У. Цифровые коды сигналов рассогласования с выходов блока 8 поступают на входы сумматоров 16 и 17, где складываются с значением координат, поступающих соответственно от блоков 3 и 6 измерения координат Х и У. На выходах сумматоров 16 и 17 формируются коды точного значения углов по координатам Х и У, которые фиксируются потом в регистре 15 точного отсчета. В регистре 13 грубого отсчета фиксируются коды координат Х и У, поступающие непосредственно от блоков 3 и 6, без учета величины рассогласования положения оптического датчика 1 и нормали к зеркалу 20. 3 ил.
ходом датчика 1, выход первого фотоприемника 25 - вторым выходом датчика 1, вход источника 21 света - входом датчика 1.
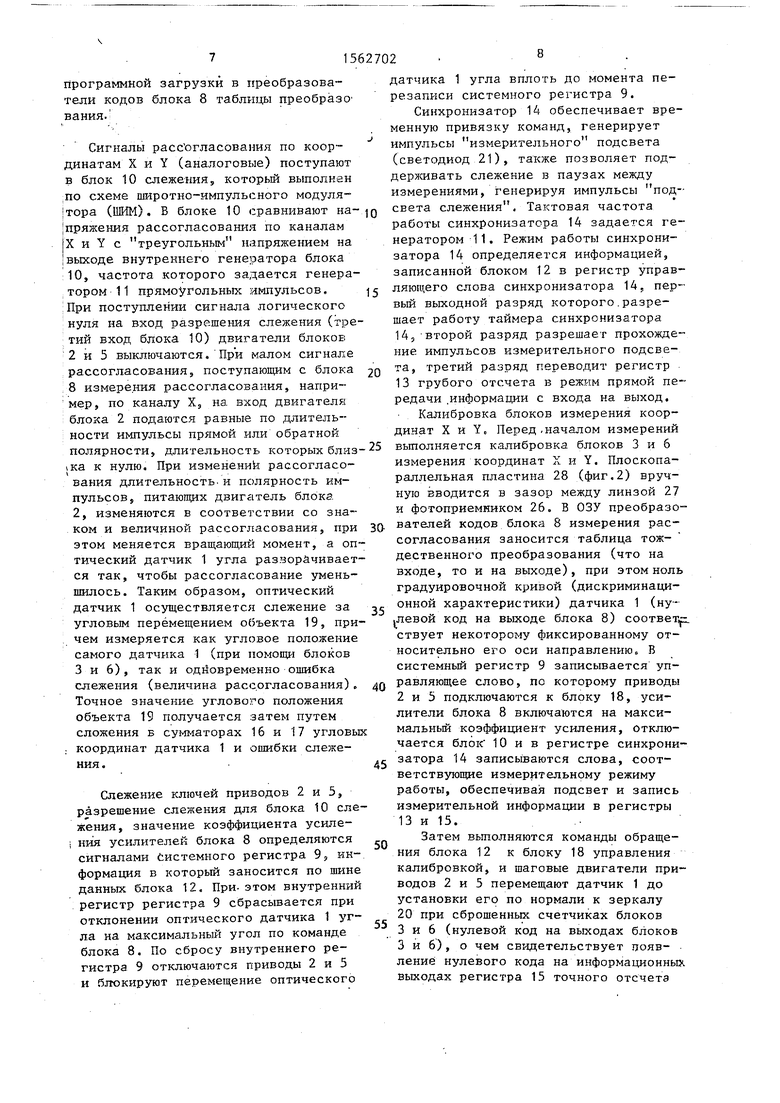
Блок 7 стабилизации выполнен в ви- зо сумматоров 16 и 17 соответственно,
де последовательно соединенных усилителя 29, вход которого является вторым входом блока 7, детектора 30, интегратора 31, инвертирующего усилителя 32 и ключа 33, синхронизирующие входы детектора 30 и ключа 33 объединены и являются первым входом блока 7.
Устройство работает следующим образом.
Импульсы подсвета поступают на светодиод 21 (фиг.2) от блока 7 стабилизации подсвета. Часть энергии световых импульсов проходит через светоделитель 24, а часть попадает
на фотоприемник 25 (фиг.З), сигнал с .с зеркалу 20).
которого пропорционален мощнрсти из- Назначение преобразователей кодов лучения светодиода 21 и поступает на блока 8 измерения рассогласования вход блока 7 стабилизации подсвета. состоит в компенсации нелинейности Сигнал с фотоприемника 25 усиливается градуировочной характеристики датчи- усилителем 29, его амплитудное значе- ка 1 и блоков 8 измерения рассогласования. Преобразователи кодов блока 8 выполнены на основе ОЗУ. Вход упние выделяется пиковым детектором 30, сигнал интегрируется корректирующим звеном 31 и поступает на вход инвертирующего усилителя 32, складыравления мультиплексором адреса, второй вход мультиплексора, информациваясь с постоянным напряжением сме- . онный вход ОЗУ и входы стробирования
щения -ЕС)Л.
Коммутация тока светодиода 21 осуществляется с помощью ключа 33 (фиг.З) , управляемого синхронизатором 14, козаписи образуют четвертый вход блока 8 и подключены к четвертому выходу блока 12 (выход параллельного интерфейса) . Это обеспечивает возможность
ритму.
Цифровые коды сигналов рассогласования X и Y поступают через преобразователи кодов блока 8 на входы
5
0
где складываются со значениями координат, поступающих соответственно от блоков 3 и 6 измерения координат X и Y. На выходе сумматоров 16 и 17 таким образом формируются коды точного значения углов по координатам X и Y, которые фиксируются затем в регистре 15 точного отсчета. В регистре 13 грубого отсчета фиксируются коды координат X и Y, поступающих непосредственно от блоков 3 и 6 измерения координат X и Y (т.е. без учета , величины рассогласования положения оптическего датчика 1 и нормали к
равления мультиплексором адреса, второй вход мультиплексора, информацизаписи образуют четвертый вход блока 8 и подключены к четвертому выходу блока 12 (выход параллельного интерфейса) . Это обеспечивает возможность
программной загрузки в преобразователи кодов блока 8 таблицы преобразо вания.
Сигналы рассогласования по координатам X и Y (аналоговые) поступают в блок 10 слежения, который выполнен по схеме широтно-импульсного модулятора (ШИМ). В блоке 10 сравнивают на-JQ пряжения рассогласования по каналам X и Y с треугольным напряжением на выходе внутреннего генератора блока 10, частота которого задается генератором 11 прямоугольных импульсов. 15 При поступлении сигнала логического нуля на вход разрешения слежения (третий вход блока 10) двигатели блоков 2 и 5 выключаются. При малом сигнале рассогласования, поступающим с блова 8 измерения рассогласования, например, по каналу Хэ на вход двигателя блока 2 подаются равные по длительности импульсы прямой или обратной
20
датчика 1 угла вплоть до момента перезаписи системного регистра 9.
Синхронизатор 14 обеспечивает вре менную привязку команд, генерирует импульсы измерительного подсвета (светодиод 21), также позволяет поддерживать слежение в паузах между измерениями, генерируя импульсы под света слежения. Тактовая частота работы синхронизатора 14 задается ге нератором 11. Режим работы синхронизатора 14 определяется информацией, записанной блоком 12 в регистр управ ляющего слова синхронизатора 14, пер вый выходной разряд которого разрешает работу таймера синхронизатора 14, второй разряд разрешает прохожде ние импульсов измерительного подсвета, третий разояд переводит регистр 13 грубого отсчета в режим прямой пе редачи информации с входа на выход.
Калибровка блоков измерения координат X и Yt Перед .началом измерений
полярности, длительность которых близ-25 выполняется калибровка блоков 3 и 6
измерения координат X и Y. Плоскопараллельная пластина 28 (фиг.2) вручную вводится в зазор между линзой 27 и фотоприемником 26. В ОЗУ преобразо вателей кодов блока 8 измерения рассогласования заносится таблица тождественного преобразования (что на входе, то и на выходе), при этом нол градуировочной кривой (дискриминационной характеристики) датчика 1 (нулевой код на выходе блока 8) соответ ствует некоторому фиксированному относительно его оси направлению В системный регистр 9 записывается управляющее слово, по которому приводы
за
З к нулю. При изменени& рассогласования длительность и полярность импульсов, питающих двигатель блока 2, изменяются в соответствии со знаком и величиной рассогласования, при этом меняется вращающий момент, а оптический датчик 1 угла разворачивается так, чтобы рассогласование уменьшилось. Таким образом, оптический датчик 1 осуществляется слежение за 35 угловым перемещением объекта 19, причем измеряется как угловое положение самого датчика 1 (при помощи блоков 3 и 6), так и одйовременно ошибка слежения (величина рассогласования). Точное значение углового положения объекта 19 получается затем путем сложения в сумматорах 16 и I7 угловых координат датчика 1 и ошибки слежения.
40
45
Слежение ключей приводов 2 и 5, разрешение слежения для блока 10 слежения, значение коэффициента усиления усилителей блока 8 определяются сигналами системного регистра 9, информация в который заносится по шине данных блока 12. При этом внутренний регистр регистра 9 сбрасывается при отклонении оптического датчика 1 угла на максимальный угол по команде блока 8. По сбросу внутреннего регистра 9 отключаются приводы 2 и 5 и блокируют перемещение оптического
5
0
датчика 1 угла вплоть до момента перезаписи системного регистра 9.
Синхронизатор 14 обеспечивает временную привязку команд, генерирует импульсы измерительного подсвета (светодиод 21), также позволяет поддерживать слежение в паузах между измерениями, генерируя импульсы подсвета слежения. Тактовая частота работы синхронизатора 14 задается генератором 11. Режим работы синхронизатора 14 определяется информацией, записанной блоком 12 в регистр управляющего слова синхронизатора 14, первый выходной разряд которого разрешает работу таймера синхронизатора 14, второй разряд разрешает прохождение импульсов измерительного подсвета, третий разояд переводит регистр 13 грубого отсчета в режим прямой передачи информации с входа на выход.
Калибровка блоков измерения координат X и Yt Перед .началом измерений
5 выполняется калибровка блоков 3 и 6
а
5
0
5
0
5
измерения координат X и Y. Плоскопараллельная пластина 28 (фиг.2) вручную вводится в зазор между линзой 27 и фотоприемником 26. В ОЗУ преобразователей кодов блока 8 измерения рассогласования заносится таблица тождественного преобразования (что на входе, то и на выходе), при этом ноль градуировочной кривой (дискриминационной характеристики) датчика 1 (нулевой код на выходе блока 8) соответ. ствует некоторому фиксированному относительно его оси направлению В системный регистр 9 записывается управляющее слово, по которому приводы
2и 5 подключаются к блоку 18, усилители блока 8 включаются на максимальный коэффициент усиления, отключается блок 10 и в регистре синхронизатора 14 записываются слова, соответствующие измерительному режиму работы, обеспечивая подсвет и запись измерительной информации в регистры 13 и 15.
Затем выполняются команды обращения блока 12 к блоку 18 управления калибровкой, и шаговые двигатели приводов 2 и 5 перемещают датчик 1 до установки его по нормали к зеркалу 20 при сброшенных счетчиках блоков
3и 6 (нулевой код на выходах блоков 3 и 6), о чем свидетельствует появление нулевого кода на информационны, выходах регистра 15 точного отсчета
Затем счетчики блоков 3 и 6 переводятся в режим счета импульсов. На поверхность зеркала 20 накладывается тарированный зеркальный оптический клин и восстанавливается положение оси чувствительности датчика 1 по нормали к его (клина) поверхности, как это описано. После этого число, содержащееся в регистре 13 грубого отсчета, соответствует известному угловому размеру клина, что может быть использовано для пересчета кодов в градусную меру с учетом любых возможных уходов в блоках 3 и 6.
Сопряжение каналов измерений. После калибровки блоков 3 и 6 выполняется согласование оптического канала измерения угла (датчик 1) и блоков 3 и 6 измерения координат X и Y. Для этого датчик 1 устанавливается по нормали к зафиксированному зеркалу 20. Пластина 28 выдвигается, в системный регистр 9 записывается новое управляющее слово, отличающееся от предыдущего битом выбора коэффициента усиления усилителей блока 8, который устанавливается номинальным. Далее производится измерение величины рассогласования (регистр 15 минум регистр 13) по каналам X и Y в зависимости от углового перемещения датчика 1 (регистр 13), задаваемого блоком 18 управления калибровкой. Информация из регистров 13 и 15 заносится в память блока 12. Полученная в результате этого таблица заносится в преобразователи кодов блока 8 измерения рассогласования (по каждой координате отдельно). Таким образом, устанавливается точное соответствие между величиной на выходах блока 8 (т.е. амплитудами импульсов с выходов фотоприемника 26( и фактической величиной углового рассогласования оси чувствительности датчика 1 и нормали к зеркалу 20 (погрешности слежения). На выходе блока 8 теперь будет присутствовать цифровой код углового рассогласования.
Формула изобретения
Следящее устройство для бесконтактного измерения параметров углового движения объекта, содержащее оптический датчик угла, блок измерения координаты X, привод координаты X, поворотную раму, жестко связанную с блоком измерения координаты X и приводом координаты X, блок стабилизации подсвета, генератор, блок измерения рассогласования, блок слежения, первый выход оптического датчика угла соединен с первым входом блока измерения рассогласования, первый выход которого соединен с первым входом блока слежения, первый выход которого соединен с первым входом привода Ю координаты X, второй вход соединен с выходом генератора, выход привода координаты X механически связан с оптическим датчиком угла, второй выход которого соединен с входом блока 5 измерения координаты X, отличающееся тем, что, с целью повышения точности и быстродействия измерений, оно снабжено блоком измерения координаты Y и приводом координа- 20 ты Y, жестко связанными с поворотной рамой, первый вход привода координаты Y соединен с вторым выходом блока слежения, блоком управления калибровкой, сумматорами X и Y, регистрами 5 грубого и точного отсчетов, синхронизатором, системным регистром, блоком счета и управления, первые входы блока управления калибровкой, синхронизатора, системного регистра, бло- 0 ков измерения координат X и Y подключены к шине данных блока счета и управления, втброй и третий выходы блока измерения рассогласования соединены соответственно с первыми входами сумматоров X и Y, вторые входы которых соответственно соединены с первыми выходами блоков измерения координат X и Y, а также соответственно с первым и вторым входами регистра гру- 0 бого отсчета, выходы сумматоров X и Y подключены соответственно к первому и второму входам регистра точного отсчета, первый и второй выходы которого соответственно соединены с пер- 5 вым и вторым входами блока счета и управления, третий, четвертый, пятый и шестой входы которого подключены Соответственно к первому и второму, ,, третьему и четвертому выходам ре- 0 гистра грубого отсчета, третий и . четвертый входы которого соединены соответственно с вторыми выходами блоков измерения координат X и Y, третьи выходы которых подключены со- 5 ответственно к седьмому и восьмому входам блока счета и управления, а также к второму и третьему входам системного регистра, первый - четвертый выходы которого соединены соот5
11
ветственно с вторым входом, привода X, вторым входом привода Y, третьим входом блока слежения и вторым входом блока измерения рассогласования, четвертый выход и третий вход которого соответственно соединены с вторым входом и первым выходом синхронизатора, третий и четвертый входы которого подключены соответственно к первому выходу блока счета и управления и выходу генератора, а второй - пя- тЬй выходы синхронизатора соединены соответственно с девятым входом блока счета и управления, пятым входом регистра грубого отсчета, третьим входом регистра точного отсчета и пер1562702 . 12
вым входом блока стабилизации, выход и второй вход которого подключены соответственно к входу и второму выходу оптического датчика угла, второй выход блока счета и управления соединен с четвертым входом системного регистра, а третий выход блока счета и управления подключен к вторым .дам блоков измерения координат X и Ґ и второму входу блока управления калибровкой, первый и второй выходы которого соединены соответственно с третьими входами приводов X и Y, чет 5 вертый выход блока счета и управления соединен с четвертым входом блока измерения рассогласования.
лП-fcbj-рс 4-сэ-Г
teJEJ
От синхронизатора №
От синх/юнизв/пфоя
Виг.З
KSffPS
,20
ФигЛ
| Устройство для измерения линейных перемещений объектов | 1982 |
|
SU1037070A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
