Изобретение относится к гироскопическому приборостроению и может быть использовано для морских, воздушных и наземных объектов, а также для гравиметрических устройств.
Известна стабилизированная в плоскости горизонта гироплатформа, чувствительный элемент которой имеет гиросферу с тремя степенями свободы, плавающую в поддерживающей жидкости [1]
Наиболее близкой к изобретению по технической сущности и достигаемому результату является стабилизированная в плоскости горизонта платформа, содержащая трехстепенной гироскоп с датчиками углов и датчиками момента по осям рамок, установленный на гироплатформе, первый и второй акселерометры горизонтальных каналов, установленные на гироплатформе, карданный подвес гироплатформы, снабженный следящими двигателями по осям подвеса, блок приема информации о скорости объекта, а также блок управления и выработки выходных параметров и второй входы которого соединены с первым и вторым акселерометрами соответственно, третий вход с выходом блока приема информации о скорости объекта, только для случая косвенной стабилизации, четвертый и пятый входы с выходами датчиков углов соответственно первого и второго следящих двигателей, установленных по осям карданова подвеса, остальные входы блока управления и выработки выходных параметров, число которых соответствует числу датчиков углов гироскопа, соединены с выходами соответствующих датчиков углов гироскопа, выходы блока управления и выработки выходных параметров по сигналам управления, число которых соответствует числу датчиков момента гироскопов, соединены с соответствующими датчиками момента.
Карданный подвес, связывающий стабилизированную гироплатформу с объектом, выполнен в виде трехосного карданного подвеса. При этом одно карданное кольцо азимутальное, обеспечивающее свободу вращения гироплатформы вокруг вертикальной оси, имеет неограниченный угол поворота.
Для передачи электрических сигналов с неподвижной части прибора на гироплатформу и обратно на оси азимутального кольца монтируется специальная пароходная контактная колонка, кольца которой и контакты выполняются из золота, платины и иридия. При этом само азимутальное кольцо в значительной степени определяет конструктивы гироскопического модуля центрального прибора гироскопической навигационной системы.
Цель изобретения сокращение массогабаритных характеристик гироплатформы, ее упрощение, повышение надежности при сохранении точностных характеристик.
Достигается это тем, что в стабилизированной в плоскости горизонта гироплатформе, содержащей трехстепенной гироскоп с датчиками углов и датчиками моментов по осям рамок или два двухстепенных гироскопа с датчиками углов и датчиками моментов по осям рамок, установленные на гиростабилизированной платформе, первый и второй акселерометры горизонтальных каналов, установленные на гиростабилизированной платформе, причем карданный подвес гиростабилизированной платформы снабжен следящими двигателями по осям подвеса, блок приема информации о скорости объекта, а также блок управления и выработки выходных параметров, первый и второй входы которого соединены с первым и вторым акселерометрами соответственно, третий вход с выходом блока приема информации о скорости, только для случая косвенной стабилизации, четвертый и пятый входы с выходами датчиков углов соответственно первого и второго следящих двигателей, установленных по осям карданова подвеса, остальные входы блока управления, число которых соответствует числу датчиков углов гироскопов, соединены с выходами соответствующих датчиков углов гироскопов, выходы блока управления и выработки выходных параметров по сигналам управления, число которых соответствует числу датчиков момента гироскопа, соединены с соответствующими датчиками момента, карданов подвес гироплатформы выполнен двухосным и дополнительно на гироплатформе установлен датчик абсолютной угловой скорости, ось чувствительности которого перпендикулярна плоскости гироплатформы, при этом дополнительный вход блока управления и выработки выходных параметров соединен с выходом датчика абсолютной угловой скорости.
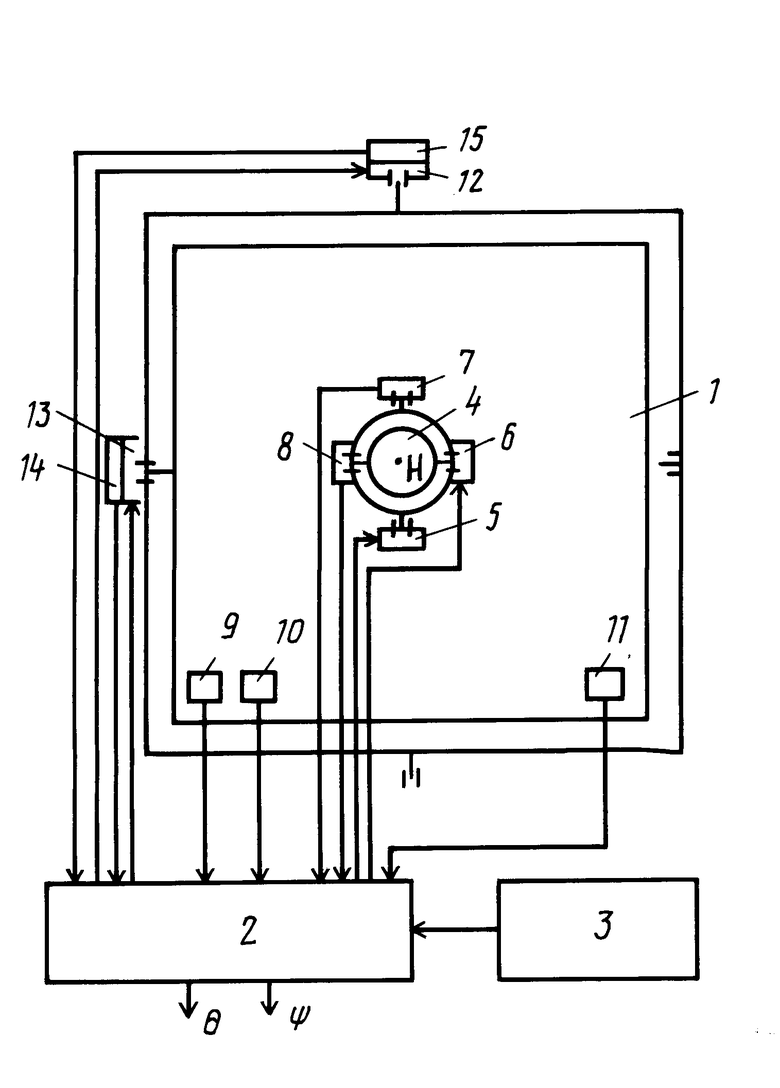
На чертеже представлена функциональная схема стабилизированной в плоскости горизонта гироплафтормы.
Стабилизированная в плоскости горизонта гироплатформа 1 содержит блок 2 управления и выработки выходных параметров. На гироплатформе 1 расположены трехстепенной гироскоп 4 с датчиками момента 5 и 6 и датчиками углов 7 и 8, два акселерометра 9 и 10, оси чувствительности которых ортогональны между собой и параллельны плоскости гироплатформы, датчик абсолютной угловой скорости 11, выход которого связан с входом блока 2 управления и выработки выходных параметров, выходы акселерометров 9 и 10, датчиков углов следящих двигателей 14 и 15, датчиков углов 7 и 8 трехстепенного гироскопа 4 и блока приема информации о скорости объекта 3 соединены с блоком управления и выработки выходных параметров 2, выходы которого соединены со следящими двигателями стабилизации 12 и 13 и с датчиками момента 5 и 6 трехстепенного гироскопа 4.
Стабилизированная в плоскости горизонта гироплатформа функционирует следующим образом.
Ось кинетического момента Н в исходном положении ортогональна плоскости чертежа, так что оси подвеса гироскопа 4 и ось Н, когда нет наклона объекта относительно плоскости горизонта, составляют ортогональный трехгранник. Оси чувствительности акселерометров 9 и 10 ортогональны между собой и параллельны плоскости гироплатформы 1, при этом ось одного из акселерометров параллельна внутренней оси карданова подвеса гироплатформы 1.
Гироплатформа 1 с помощью следящих двигателей 12 и 13 по сигналам рассогласования датчиков углов 7 и 8 гироскопа 4 все время удерживается в одной плоскости с кожухом гироскопа 4. Кожух гироскопа 4 вместе с гироплатформой 1 приводится в горизонт и удерживается в горизонте с помощью моментов, накладываемых через датчики моментов 5 и 6 гироскопа 4 токами управления по сигналам, вырабатываемым в блоке 2 управления и выработки выходных параметров. Эти токи управления соответствуют горизонтальным составляющим абсолютной угловой скорости трехгранника Дарбу, повернутого на угол К курс объекта относительно географического трехгранника Дарбу. В свою очередь сигналы, по которым вырабатываются токи управления гироскопа 4, вырабатываются в блоке 2 управления и выработки выходных параметров в результате обработки величин горизонтальных составляющих кажущихся ускорений вершин трехгранника Дарбу, измеренных акселерометрами 9 и 10, используя величину вертикальной составляющей абсолютной угловой скорости трехгранника Дарбу. Следует отметить, что гироплатформа 1 может быть построена только на двухстепенных гироскопах. Для оценки влияния инструментальных погрешностей обозначим исходную систему координат трехгранник Дарбу, повернутый на угол К относительно географического трехгранника ζηζ. С гироплатформой 1 свяжем систему координат приборный трехгранник XYZ, которая образуется из системы координат ζηζ поворотом вокруг оси ζ на угол β и затем поворотом вокруг оси СY на угол γ. Составляющие абсолютной угловой скорости трехгранника ζηζ обозначим соответственно р, q, r. Тогда сигналы управления гироскопом 4, вычисляемые в блоке 2 и подаваемые на входы датчиков момента 5 и 6 будут иметь следующий вид: Ωy
Ωy
и  -Ωx. При этом S оператор Лапласа
-Ωx. При этом S оператор Лапласа
Ω x p + Δ Ω x
Ω y q + Δ Ω y
Ω z r + Δ Ω z, где Δ Ω x, Δ Ω y, Δ Ω z погрешности определения составляющих абсолютной угловой скорости трехгранника ζηζ ax и
ax и  ay показания акселерометров 9 и 10, причем
ay показания акселерометров 9 и 10, причем ax=
ax=  +rp-ω
+rp-ω ay= -p+rq+ωoβ, где ωо частота Шуллера;
ay= -p+rq+ωoβ, где ωо частота Шуллера;
β γ суть ошибки вертикали места. Поскольку ΔΩy=  +rβ+ΔΔq
+rβ+ΔΔq
ΔΩx=  -rγ+ΔΔp где ΔΔ р и ΔΔ q дрейфы гироскопа 4, уравнения ошибок выработки горизонтальных составляющих абсолютной угловой скорости трехгранника ζηζ и вертикали места будут
-rγ+ΔΔp где ΔΔ р и ΔΔ q дрейфы гироскопа 4, уравнения ошибок выработки горизонтальных составляющих абсолютной угловой скорости трехгранника ζηζ и вертикали места будут +ω sin ϕΔΩE+ω
+ω sin ϕΔΩE+ω -ω sin ϕΔΩN+ω
-ω sin ϕΔΩN+ω
ΔΩN-ω sin ϕδ- ΔΔqN
ΔΔqN
-ΔΩE-ω sin ϕσ+ -ΔΔpE где δ β cosK + γ sinK
-ΔΔpE где δ β cosK + γ sinK
σ γ cosK β sinK
Δ Ω N Δ Ω ycosK Δ Ω xsinK
Δ Ω E Δ Ω xcosK + Δ Ω ysinK
ω угловая скорость Земли;
ϕ широта места.
Из системы уравнений (1) следует, что установившееся значение ошибки вертикали места определяются
σ  δ
δ 
Возьмем ΔΔ рЕ ΔΔqN 0,01 o/час инструментальная погрешность определения вертикальной составляющей абсолютной угловой скорости трехгранника ζηζ
Δ Ω z ΔΔ r, где ΔΔ r дрейф датчика абсолютной угловой скорости 11.
Примем ΔΔ r 0,1 о/час.
Тогда ошибка вертикали места будет, имея в виду ωо 4,5 1/час.
ω  1/час ϕ=60o порядка 5 угл.сек.
1/час ϕ=60o порядка 5 угл.сек.
Таким образом, предлагаемая стабилизированная в горизонте гироплатформа может обеспечивать высокоточную непосредственную и косвенную стабилизацию объектов в плоскости горизонта, а также служить чувствительным элементом для выработки навигационных параметров, поскольку в соответствии с системой уравнений (1) и при наличии датчика абсолютной угловой скорости 11 вырабатывает необходимые для этого три составляющие абсолютной угловой скорости приборного трехгранника.
Указанные возможности предлагаемая стабилизированная в плоскости гироплатформа обеспечивает при существенном уменьшении массогабаритных характеристик.
Информация, поступающая в блок приема информации о скорости объекта, может иметь различный физический смысл, например, скорость объекта от лага или информация о текущих координатах объекта от радио или спутниковых систем. Ограниченное время устройство может работать без вступления информации о скорости объекта.
Особую ценность предлагаемое изобретение представляет для гравиметрических устройств при непосредственной установке гравиметрических чувствительных элементов на стабилизированной в плоскости горизонта гироплатформе или при косвенной стабилизации этих элементов по данным угла бортовой качки θ и килевой качки ϑ, поскольку обеспечивается автономная высокоточная стабилизация в двухосном карданном подвесе, не требующая внешней информации о курсе объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 1996 |
|
RU2114395C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1991 |
|
RU2046289C1 |
| ГИРОГОРИЗОНТКОМПАС | 1993 |
|
RU2051330C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247944C2 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1995 |
|
RU2098763C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2004 |
|
RU2256879C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2004 |
|
RU2257545C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА (ВАРИАНТЫ) | 2005 |
|
RU2272995C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2251078C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ | 2001 |
|
RU2197716C2 |
Использование: гидроскопия. Сущность: устройство содержит гироплатформу с трехстепенным (или двумя двухстепенными) гироскопами с датчиками углов и датчиками моментов, первый и второй акселерометры горизонтальных каналов, блок приема информации о скорости объекта, блок управления, карданный подвес гороплатформы выполнен двухстепенным, на гироплатформе установлен датчик абсолютной угловой скорости. 1 ил.
СТАБИЛИЗИРОВАННАЯ В ПЛОСКОСТИ ГОРИЗОНТА ГИРОПЛАТФОРМА, содержащая трехстепенной гироскоп с датчиками углов и датчиками моментов по осям рамок или два двухстепенных гироскопа с датчиками углов и датчиками моментов по осям рамок, установленные на гироплатформе первый и второй акселерометры горизонтальных каналов, причем карданный подвес гироплатформы снабжен следящими двигателями по осям подвеса, блок приема информации о скорости объекта, а также блок управления, первый и второй входы которого соединены с первым и вторым акселерометрами соответственно, третий вход соединен с выходом блока приема информации о скорости объекта, остальные входы блока управления, число которых соответствует числу датчиков углов гироскопов, соединены с выходами соответствующих датчиков углов гироскопов, выходы блока управления по сигналам управления, число которых соответствует числу датчиков момента гироскопов, соединены с соответствующими датчиками момента, отличающаяся тем, что карданный подвес гироплатформы выполнен двухосным и дополнительно на гироплатформе установлен датчик абсолютной угловой скорости, ось чувствительности которого перпендикулярна плоскости гироплатформы, при этом дополнительный вход блока управления соединен с выходом датчика абсолютной угловой скорости.
| Кошляков В.Н | |||
| Задачи динамики твердого тела и прикладной теории гироскопов, М., Наука, 1985, с | |||
| Стеклографический печатный станок с ножной педалью | 1922 |
|
SU236A1 |

