Изобретение относится к гироскопическому приборостроению и может быть использовано для обеспечения навигации движущихся объектов.
Известен способ выработки навигационных параметров [1]. Этот способ включает измерение составляющих кажущегося ускорения при помощи акселерометров, определение составляющих абсолютной угловой скорости приборного трехгранника при помощи гироскопов, выработку навигационных параметров.
Недостатком известного способа является длительный переходной процесс, который обусловлен динамической взаимосвязью между погрешностью определения направления географического меридиана и погрешностью определения широты места при автономной выработке навигационных параметров.
Свободные колебания погрешностей выработки навигационных параметров имеют в этом случае период суток - 24 ч. Это обстоятельство негативно сказывается на времени готовности системы при ее запуске.
Целью изобретения является сокращение времени переходного процесса автономной выработки навигационных параметров, а также повышение точности выработки выходных навигационных параметров.
Технический эффект достигается тем, что широту ϕ места и угол α, определяющий направление географического меридиана, вычисляют из выражений

K = α-C.
Проиллюстрируем предлагаемый способ на следующем примере.
На чертеже представлена функциональная схема гироскопической навигационной системы, где приняты следующие обозначения:
1 - блок управления и выработки выходных параметров;
2 - гироплатформа в двухосном карданном подвесе;
3 - трехстепенной гироскоп;
4, 5 - датчики момента гироскопа;
6, 7 - датчики угла гироскопа;
8 - датчик угловой скорости ДУС;
9, 10 - акселерометры;
11, 12 - датчики углов качек;
13, 14 - следящие двигатели.
Гироскопическая навигационная система содержит блок управления и выработки выходных параметров 1, гироплатформу 2. На гироплатформе расположены трехстепенный гироскоп 3 с датчиками момента 4, 5 и датчиками угла 6, 7, датчик угловой скорости 8, ось чувствительности которого перпендикулярна плоскости гироплатформы, акселерометры 9, 10. По осям карданного подвеса установлены датчики углов качек 11, 12 и следящие двигатели 13, 14.
Гироскопическая навигационная система функционирует следующим образом.
Гироплатформа 2 с помощью следящих двигателей 13, 14 по сигналам рассогласования датчиков угла 6, 7 гироскопа 3 все время удерживается в одной плоскости с кожухом гироскопа 3. По сигналам акселерометров 9, 10 и ДУС(а) 8 гироплатформу с помощью датчиков момента гироскопа 3 удерживают в плоскости горизонта.
С осями чувствительности гироскопов свяжем правую систему координат XYZ - приборный трехгранник. Ось OY направим в сторону носовой части объекта, в его диаметральной плоскости. Ось OZ - перпендикулярна плоскости гироплатформы и направлена вверх. Оси чувствительности акселерометров совпадают с осями ОХ и ОУ соответственно.
Для обоснования предлагаемого способа воспользуемся вспомогательным свободным в азимуте трехгранником Дарбу Х1Y1Z1, по составляющим угловой скорости которого и будем определять навигационные параметры. Горизонтальные составляющие угловой скорости трехгранника Х1Y1Z1 определим следующим образом:
определим следующим образом:

где ах и ау - показания акселерометров;
С - показания ДУС;
R - радиус Земли.
Для рассматриваемого примера управляющие сигналы гироскопа 3 будут
Имеют место быть следующие соотношения для примера:

K = α-C,
где ϕ - широта места;
α - угол между осью ОУ1 и направлением географического меридиана;
К - курс объекта;
ω - скорость Земли.
Далее, сравнивая значения ϕ и α, выработанные предлагаемым способом, и аналогичные параметры, выработанные традиционными способами, где свободные колебания ошибок имеют суточный период, можно сформировать замеры ε1 и ε2/ , опираясь на которые можно автономно оценить инструментальные погрешности чувствительных элементов и погрешности навигационных параметров. Методы оптимальной фильтрации позволят эффективно оценить погрешности вырабатываемых автономно навигационных параметров без использования внешней информации
ε1 = ϕ1-ϕ;
ε2 = α1-α,
где ϕ1 и α1- параметры, выработанные традиционными способами.
Следует отметить, что дополнительно определяя sinϕ2, используя при этом значения ϕ и α, можно получить сразу дополнительный точностный эффект.
Дополнительные возможности можно получить, определяя ϕ и α, используя значение широты от источника внешней информации в подинтегральных выражениях системы уравнения (1).
Следует также отметить, что предлагаемый способ может быть осуществлен для различных типов инерциальных систем, будь то платформенная или бесплатформенная инерциальная система, для различных типов гироскопов, будь то механические, волоконные, лазерные, твердотельные и др., или их комбинации.
Более того, принимая во внимание конструктивные особенности систем, можно создавать дополнительные возможности повышения точности выработки навигационных параметров, используя предлагаемые способы выработки навигационных параметров.
Так, для класса систем, у которых гироплатформа находится в плоскости горизонта, этому будет способствовать конструктивное обеспечение возможности менять время от времени положение осей чувствительности гироскопов (гироскопа), стабилизирующих гироплатформу в плоскости горизонта на ограниченные углы вокруг оси, перпендикулярной плоскости гироплатформы.
Для рассмотренного в данной заявке примера гироскопической системы дополнительные возможности повышения точности могут быть обеспечены без изменения конструктивов: каждый раз при движении объекта на новом курсе появляется дополнительная информация для повышения точности выработки навигационных параметров.
Для бесплатформенных систем повышению точности будет способствовать конструктивное обеспечение возможности менять время от времени положение осей чувствительности ДУСов, лежащих в плоскости палубы, на ограниченные углы вокруг оси, перпендикулярной плоскости палубы.
Источники информации
1. В.А. Беленький, патент РФ 2000544 C, 07.09.93.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2120608C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2002 |
|
RU2206067C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 1996 |
|
RU2114395C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1991 |
|
RU2046289C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247324C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2126136C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1998 |
|
RU2147731C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247944C2 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1998 |
|
RU2138018C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2145058C1 |
Использование: для обеспечения навигации движущихся объектов. Сущность: измеряют составляющие кажущегося ускорения при помощи акселерометров, определяют составляющие абсолютной угловой скорости приборного трехгранника. Широту места и угол определяют по приведенным математическим формулам. Технический результат: сокращение времени переходного процесса автономной выработки навигационных параметров, а также повышение точности выработки выходных навигационных параметров. 1 ил.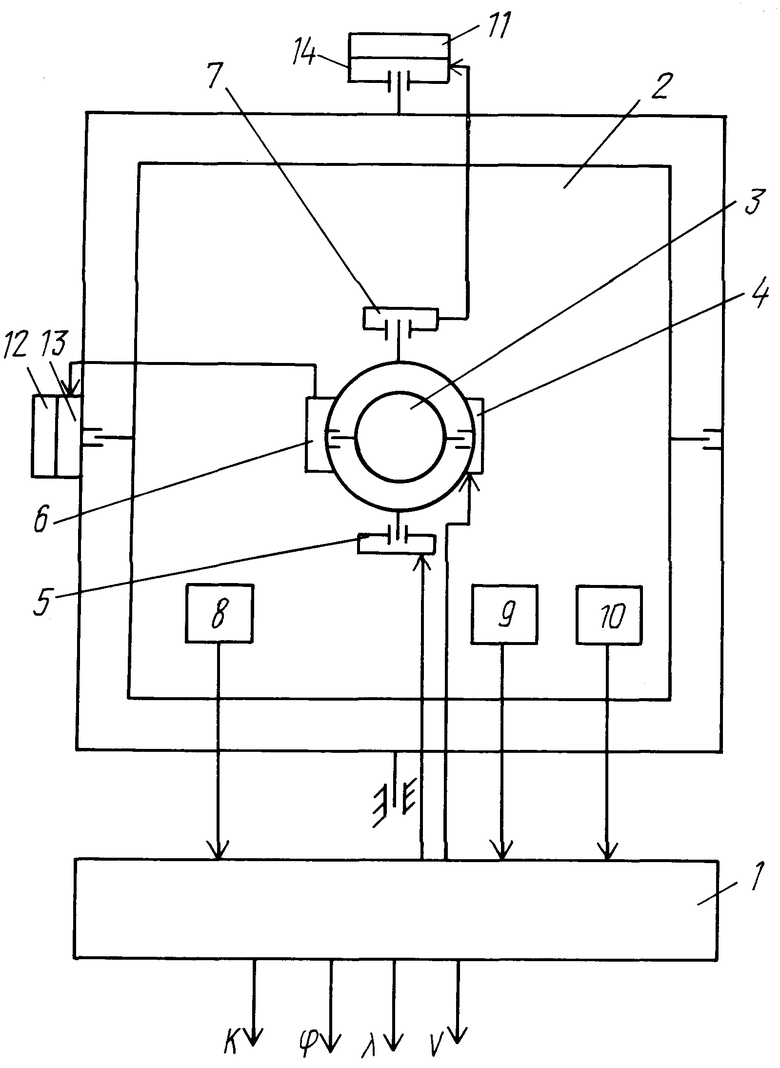
Способ выработки навигационных параметров, включающий измерение составляющих кажущегося ускорения при помощи акселерометров, определение составляющих абсолютной угловой скорости приборного трехгранника при помощи гироскопов, выработку навигационных параметров, отличающийся тем, что широту ϕ места и угол α, определяющий направление географического меридиана, вычисляют из выражений


где Ωx,Ωy - управляющие сигналы гироскопа; горизонтальные составляющие угловой скорости приборного трехгранника.
горизонтальные составляющие угловой скорости приборного трехгранника.
| RU 2000544 С, 07.09.1993 | |||
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1998 |
|
RU2147731C1 |
| US 3304786 А, 21.02.1967 | |||
| US 4303978 А, 01.12.1981 | |||
| US 4675820 А, 23.06.1987. | |||

