Изобретение относится к приборостроению и может быть использовано для измерения углов наклона объектов в условиях действия вибраций и импульсных перегрузок, например ударного происхождения.
Наиболее широкое применение для измерения углов наклона объектов получили способы, основанные на регистрации угла между вертикальным маятником и осью объекта. Конструктивное исполнение маятника и преобразователей его положения может быть самым разнообразным.
Однако при действии импульсных (ударных) перегрузок до момента занятия маятником установившегося положения полезна информация практически теряется. Кроме того, затруднительным является измерение угла наклона объекта при действии вибрации с фиксированной, либо плавающей частотой. Действие указанных факторов приводит к росту погрешностей измерений угла наклона и ограничивает область применения данного способа.
Известны также динамические способы измерения угла наклона, к которым можно отнести способ точек реверсий маятника. Способ точек реверсий маятника заключается в измерении амплитуды колебаний маятника, первоначально отклоненного от положения равновесия вместе с объектом на измеряемый угол. Нетрудно убедиться, что амплитуда колебаний в этом случае будет равна удвоенному значению угла наклона, следовательно, методическая погрешность измерений может быть снижена в два раза. Впоследствии были предложены динамические способы измерения угла наклона, которые принципиально позволяют более, чем в два раза повысить точность проводимых измерений.
Наиболее близким аналогом изобретения является способ определения угла наклона, который заключается в измерении мгновенной угловой скорости свободных колебаний маятника, выделении на полученном сигнале временных интервалов вида τi ≅ aTb ≅ Tk/4, где а целое число;
Тв период вибрационных колебаний;
Тк период колебаний маятника.
Далее на интервалах τi получают интегральные значения мгновенной угловой скорости Ii, а угол α наклона определяют по соотношению
α  где К число выполненных многократных измерений.
где К число выполненных многократных измерений.
Принципиальным моментом, заложенным в основу этого способа измерений в отличие от способа точек реверсий маятника является возможность накопления с течением времени полезной информации (при колебаниях маятника).
К недостаткам данного способа измерений можно отнести невозможность использования участков эпюры с импульсными "выбросами", достаточно сложный алгоритм выбора интервалов τi и необходимость определения периода Тв. При таком алгоритме определения полезной величины большая часть эпюры движения маятника может не использоваться в обработке, что снижает точность измерений и увеличивает время на обработку сигнала.
Целью предлагаемого способа измерений является повышение точности измерений угла наклона за счет уменьшения влияния ошибок, обусловленных действием вибраций и импульсных (ударных) перегрузок.
Поставленная цель достигается тем, что в известном способе определения угла наклона, при котором маятниковый чувствительный элемент (ЧЭ) с периодом колебаний Тк отклоняют в плоскости измерения от положения равновесия и затем измеряют мгновенную угловую скорость его свободных колебаний, производят регистрацию абсолютных значений угловой скорости только одной гармоники колебаний с периодом Тк, а значение угла наклона α находят из соотношения
α  где tизм. длительность времени измерения угла наклона;
где tизм. длительность времени измерения угла наклона;  (t)
(t) (t)| абсолютное значение угловой скорости гармоники с периодом Тк.
(t)| абсолютное значение угловой скорости гармоники с периодом Тк.
При этом подразумевается, что затухание амплитуды колебаний маятникового ЧЭ под действием диссипативных сил за время tизм. достаточно мало.
Сопоставительный анализ заявляемого решения с наиболее близким аналогом показывает, что формируемое значение, пропорциональное измеряемому углу наклона, осуществляется в течение всего времени регистрации по абсолютному значению угловой скорости гармоники колебаний с периодом Тк, определяемом из выражения Тк > 10 Тв, где Тв максимальный период вибрационных колебаний (верхняя граничная частота импульсных "выбросов").
В основу данного способа измерений заложено частотное разделение гармоник, обусловленных собственным периодом колебаний маятника и вибрациями и импульсными (ударными) воздействиями, которому на практике легко удовлетворить. Действительно, нижняя граничная частота для вибраций и импульсных перегрузок составляет ≈10.20 Гц, следовательно, максимальное значение периода вибрации Тв равно 0,05.0,1 с. Период же колебаний маятникового ЧЭ выбирается равным Тк > 10 Тв, т.е. минимум на порядок больше. Реально период колебаний маятника достаточно стабильная величина, слабо зависящая от угла наклона. Так, при изменении угла α от 0 до 15о, изменение периода колебаний не превышает 0,5%
В принятых выше обозначениях выражение 4/tизм./Тк) не что иное, как коэффициент воспроизведения, показывающий, во сколько раз значение интеграла от абсолютной величины угловой скорости больше значения угла наклона α. При времени измерений, равном периоду колебаний tизм. Тк, значение полученного интеграла  (t)dt в четыре раза больше, чем измеряемый угол наклона. Это соответствует физической картине колебаний ЧЭ, когда первоначально отклоненный маятник проходит положение равновесия (один угол α ), отклоняется в противоположную сторону (второй угол α ): вновь проходит положение равновесия (третий угол α ) и возвращается в исходное положение (четвертый угол α ). С увеличением времени полезная информация о величине угла наклона будет накапливаться, что обеспечивает дальнейшее повышение точности измерений.
(t)dt в четыре раза больше, чем измеряемый угол наклона. Это соответствует физической картине колебаний ЧЭ, когда первоначально отклоненный маятник проходит положение равновесия (один угол α ), отклоняется в противоположную сторону (второй угол α ): вновь проходит положение равновесия (третий угол α ) и возвращается в исходное положение (четвертый угол α ). С увеличением времени полезная информация о величине угла наклона будет накапливаться, что обеспечивает дальнейшее повышение точности измерений.
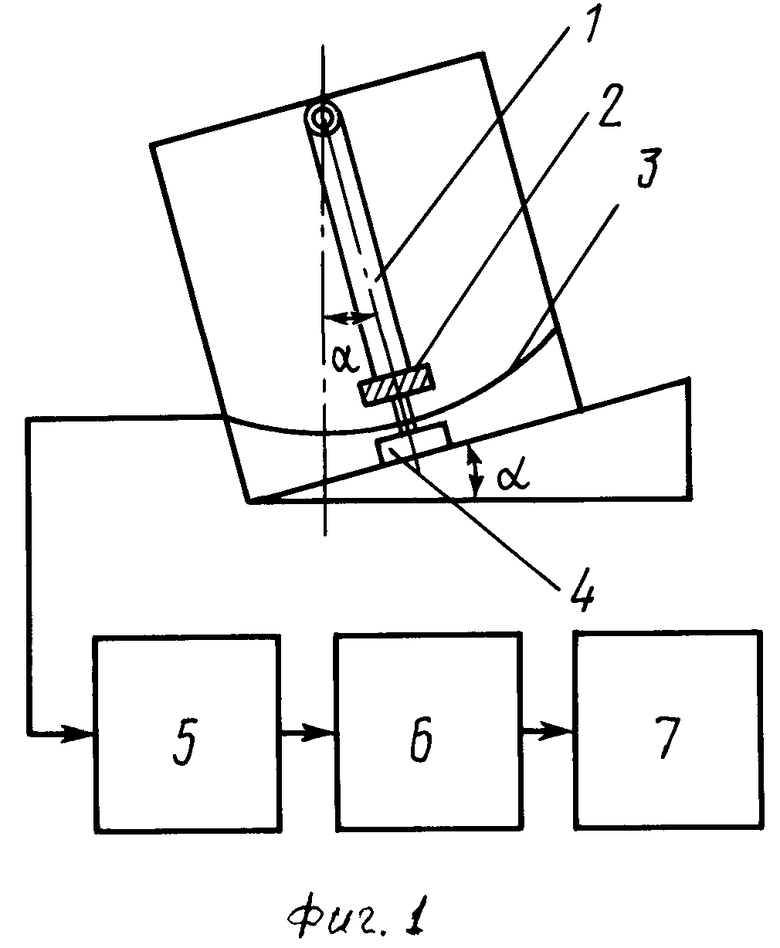
На фиг. 1 показано устройство, реализующее предлагаемый способ.
Устройство состоит из маятникового чувствительного элемента 1, магнита 2, обмотки 3 формирования выходного сигнала, замкового устройства 4. Обмотка формирования выходного сигнала через фильтр 5 и двухполупериодный выпрямитель 6 подключена к регистратору 7, например интегрирующему гальванометру севетолучевого осциллографа.
Измерения начинаются с установки корпуса датчика на объект и подачи команды на замковое устройство 4. Освобожденный от силовых связей с корпусом маятниковый ЧЭ приходит в движение. При движении ЧЭ магнит 2 наводит в обмотке 3 сигнал, пропорциональный скорости его движения.
На фиг. 2 показаны эпюры выходных сигналов с обмотки 3 (при действии вибраций и импульсных перегрузок), спектр входного сигнала и амплитудно-частотная характеристика фильтра 5, на фиг. 3 сигнал на выходе фильтра 5, на выходе двухполупериодного выпрямителя 6 и выходной сигнал, записанный интегрирующим гальванометром осциллографа 7. На протяжении всего времени tизм. измерений происходит накопление информации о величине угла α наклона. Точность выполняемых измерений зависит от ряда факторов, основными из которых являются спектральный состав результирующих колебаний и качество фильтрации сигнала. Для формирования требуемого спектра результирующих колебаний и необходимо выполнение условия Тк > 10 Тв, где Тв период сигнала вибрации-воздействия. Важно подчеркнуть, что фазовый спектр сигнала с обмотки 3 слабо влияет на точность выполняемых измерений, т.к. конечное значение формируемого интеграла практически не зависит от фазы гармоники с периодом Тк.
Требуемое качество фильтрации сигнала обеспечивается технической реализацией схемы фильтра 5.
Таким образом, использование требуемого предлагаемого способа обеспечивает по сравнению с существующими техническими решениями повышение точности измерений при одинаковом соотношении "сигнал-помеха", а также одновременно снижение трудоемкости алгоритма вычислений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения угла наклона | 1988 |
|
SU1539531A1 |
| Устройство для определения угла наклона | 1978 |
|
SU792074A1 |
| КРУТИЛЬНЫЙ СЕЙСМОМЕТР | 1994 |
|
RU2091817C1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1985 |
|
SU1328672A1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭМУЛЬСИОННОГО КОСМЕТИЧЕСКОГО СРЕДСТВА | 2010 |
|
RU2427362C1 |
| ГОРИЗОНТАЛЬНЫЙ МАЯТНИКОВЫЙ ИЗМЕРИТЕЛЬ УГЛА | 2013 |
|
RU2563546C2 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ КАВИТАЦИОННОЙ ОБРАБОТКИ ЖИДКИХ СРЕД И РАСПОЛОЖЕННЫХ В СРЕДЕ ОБЪЕКТОВ | 2013 |
|
RU2547508C1 |
| МАЯТНИКОВЫЙ ДАТЧИК УРОВНЯ | 2007 |
|
RU2345325C1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1977 |
|
SU672486A1 |
| Датчик угла наклона объекта в двух взаимно перпендикулярных плоскостях | 1982 |
|
SU1044980A2 |


Использование: для измерения углов наклона объектов в условиях действия вибраций и импульсных перегрузок, например, ударного происхождения. Сущность изобретения: в способе определения угла наклона маятниковый чувствительный элемент с периодом колибаний Tк отклоняют в полости измерения от положения равновесия, измеряют абсолютное значение текущей угловой скорости его движения для одной спектральной гармоники с периодом, равным периоду колебаний Tк величину которого выбирают из условия Tк больше или примерно равно 10 Tв где Tв -период сигнала вибрации, а угол наклона находят по формуле. 3 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА, при котором маятниковый чувствительный элемент с периодом колебаний Tк отклоняют в плоскости измерения от положения равновесия, измеряют абсолютное значение текущей угловой скорости его движения и формируют из него интегральное значение, пропорциональное углу наклона, отличающийся тем, что измеряют абсолютное значение текущей угловой скорости только одной спектральной гармоники с периодом, равным периоду колебаний Tк маятникового чувствительного элемента, величину которого выбирают из условия Tк ≥ 10 Tв, где Tв период сигнала вибрации, а значение угла наклона α находят
где tизм. время измерений; модуль угловой скорости гармоники с периодом колебаний Tк.
модуль угловой скорости гармоники с периодом колебаний Tк.
| Способ определения угла наклона | 1988 |
|
SU1539531A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
