Горизонтальный помехозащищенный маятниковый измеритель служит для измерения угла относительно местной гравитационной вертикали и имеет высокую чувствительность по отношению к полезному сигналу. Изобретение относится, в частности, к области транспортного строительства и может быть использовано при автоматизации, например, землеройно-транспортных машин, предназначенных для сооружения земляного полотна, а также устройства оснований и покрытий автомобильных дорог.
Маятниковый измеритель угла как наиболее простой и дешевый нашел широкое применение в автоматизации строительных машин. Однако он имеет один существенный недостаток: сигнал от поворота корпуса измерителя и сигнал от ускорения, действующего в плоскости качания маятника, физически не различимы. Но первый при этом является полезным сигналом, а второй - помехой. Так возникла проблема помехозащищенности маятниковых измерителей угла.
Для улучшения динамических характеристик маятниковых измерителей угла необходимо стремиться к увеличению демпфирования маятника силами, пропорциональными его абсолютной скорости и уменьшать демпфирование силами, пропорциональными его относительной (относительно корпуса) скорости.
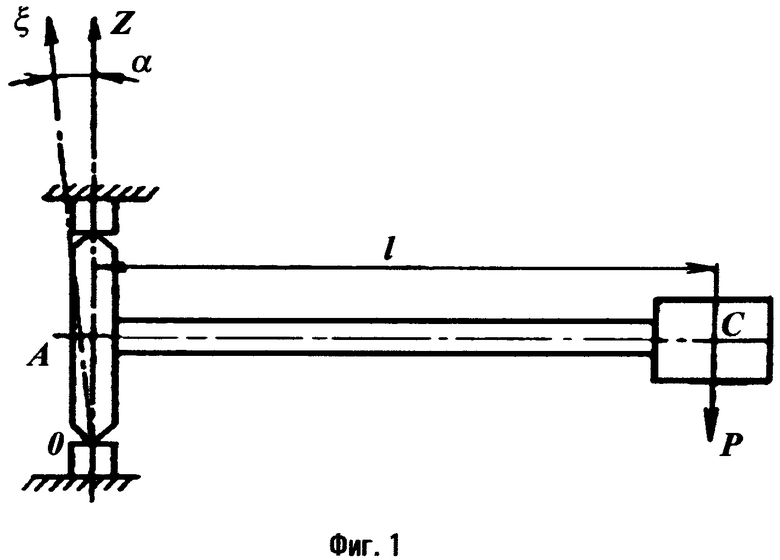
Горизонтальный маятник (фиг. 1) является одной из известных разновидностей физического маятника, у которого ось вращения 0Z составляет с вертикалью 0ξ некоторый постоянный малый угол α. Такой маятник совершает колебания в плоскости, перпендикулярный к оси 0Z и наклоненной плоскости горизонта также на угол α. В конструкции устройства использован принцип горизонтального маятника, демпфированного силами вязкого трения, пропорциональными «абсолютной» скорости.
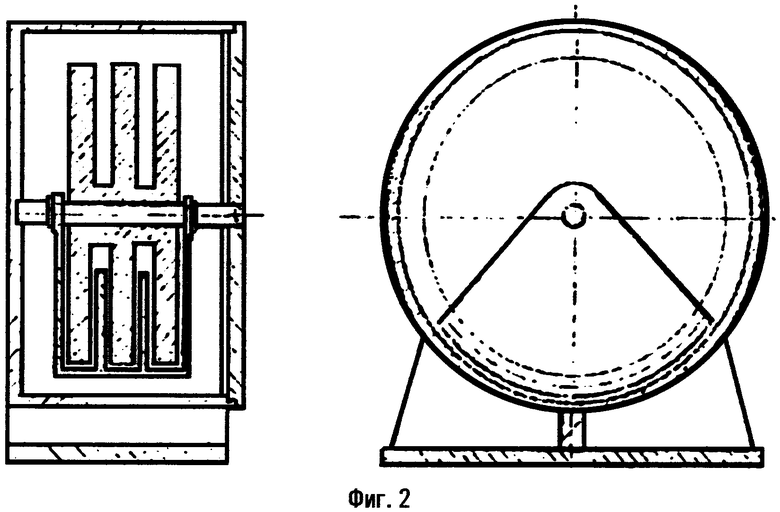
Одной из возможных реализаций принципа демпфирования маятника силами, пропорциональными его «абсолютной» скорости, является конструкция измерителя, изображенного на фиг. 2. Измерители угла с сильным демпфированием маятника относительно тяжелого сбалансированного тела получили условное название СДУ, что означает стабилизированный по отношению к помехе датчик угла. По сравнению с простым маятниковым датчиком датчик СДУ обладает значительно более высокими показателями по каналу полезного сигнала и при близких динамических качествах значительно лучше защищен от действия помех.
Такие качества СДУ дали возможность успешно применить его при создании первых отечественных автоматизированных строительных машин с высоким уровнем помехи, например планировщиков полей, а оригинальность конструкции защитить - авторскими его свидетельствами на изобретение и патентами в США.
Период свободных колебаний предлагаемого устройства (фиг. 3) составляет:

где I - момент инерции маятника относительно оси 0Z;
l - расстояние АС между центром тяжести маятника С и осью вращения 0Z.
Наличие в знаменателе подкоренного выражения множителя sinα позволяет существенно увеличить период колебаний, что способствует повышению помехозащищенности прибора. Свойства горизонтального физического маятника состоят в том, что он более чувствителен, чем вертикальный, т.к. для его отклонения от положения равновесия на угол β необходимо приложить момент m·g·l·sin α·sin β, а для вертикального - m·g·l·sin β. Следовательно, горизонтальный маятник фиксирует возможные наклоны в sin α раз меньше, чем маятник, совершающий колебания в вертикальной плоскости, что способствует помехозащищенности прибора.
Целью изобретения является использование положительных качеств горизонтального маятника, обеспечив его демпфирование значительными силами, пропорциональными его «абсолютной» скорости.
В предлагаемом конструктивном исполнении роль тяжелого сбалансированного тела принимает на себя цилиндрический объем жидкости, находящейся в корпусе датчика соосно с осью маятника. При возмущении маятника силами инерции основная масса жидкости, заполняющая корпус устройства (фиг. 3), продолжает оставаться в относительном покое, а в приграничном слое между жидкостью и пластинами маятника возникают значительные диссипативные силы. При этом маятник помещен в закрытый цилиндрический корпус, заполненный демпфирующей жидкостью, относительно которой демпфируется значительными силами, пропорциональные его «абсолютной» скорости. Таким образом, в предлагаемом устройстве вследствие цилиндрической формы корпуса датчика объем находящейся в нем демпфирующей жидкости также имеет форму цилиндра, ось которого совпадает с осью маятника. Этим обеспечивается хорошая невозмущаемость «жидкого сбалансированного тела» ускорениями, действующими в плоскости качания маятника.
Измеритель угла (фиг. 3) состоит из корпуса 1, горизонтального маятника 2 на оси 3, наклоненной к местной гравитационной вертикали под постоянным малым углом α. Маятник 2 набран в виде ламинированного набора N круговых тонких пластин, одним концом закрепленных на оси 3, а другим на дебалансной планке 7, в которой выполнено отверстие для винта, фиксирующего маятник при транспортировке. Такой маятник совершает колебания в плоскости, перпендикулярной к оси 0Z и наклоненной к плоскости горизонта также на угол α. Угол β (полезный сигнал) измеряется относительно оси 0Y корпуса измерителя в плоскости, проходящей через местную гравитационную вертикаль 0ξ перпендикулярно к плоскости чертежа или параллельно плоскости Y0Z.
Бесконтактный преобразователь 4 угла β в электрический сигнал показан внутри корпуса с выводом наружу электрического разъема и закрыт крышкой. Многолопастной маятник и ось расположены в герметичном корпусе, полностью заполненном демпфирующей жидкостью. Маятник 2 с дебалансом жестко закреплен на оси 3 и может свободно поворачиваться в опорах 5 корпуса 1. Корпус 1 выполнен в виде цилиндра, ось которого совпадает с осью маятника 3. Корпус 1 закрыт герметичной крышкой 9, в которой предусмотрена заливка. Заливное отверстие закрыто пробкой 10 и сапуном 11.
На корпусе имеются заливное и сливное отверстия, закрытые пробками. Преобразователь «угол β - электрический сигнал» закрыт малой крышкой 4. На корпусе 1 установлен упорный винт 12, который фиксирует маятник 2 при транспортировке измерителя угла. При завинчивании винта его конусная часть входит в отверстие шайбы, закрепленной на маятнике, и фиксирует последний относительно корпуса 1.
Герметичный корпус измерителя смонтирован на опорной плите 13. Одна сторона корпуса установлена на плите 13 шарнирно осью 14, другая - закреплена к плите регулировочнымболтом 15, с помощью которого задается величина постоянного угла α. Опорная плита 13 крепит устройство болтами 16 к раме СДМ, угловое положение которой - β контролируется.
Преобразователь полезного угла наклона маятника 3 относительно корпуса устройства при наклонах последнего преобразуется в пропорциональный углу наклона электрический сигнал. Максимальный угол поворота маятника ограничен посредством упоров в пределах ±4 град. На фиг. 3 упоры условно не показаны. На корпусе 1 установлен упорный винт 12, который фиксирует маятник 2 при транспортировке измерителя угла. При завинчивании винта его конусная часть входит в отверстие дебалансной планки маятника и фиксирует его относительно корпуса 1.
Действие измерителя происходит следующим образом.
Корпус измерителя устанавливается на опорной плите так, чтобы его правая часть была соединена с ней шарнирно, а левая - с помощью регулируемых винтов образовала заданный угол α между нижней плоскостью измерителя и верхней плоскостью плиты. Далее устройство вместе с опорной плитой жестко закрепляется в горизонтальной плоскости на раме машины, так чтобы предполагаемое направление вертикальной плоскости измерения угла β совпадало с продольной осью рамы машины.
Вывинчиваем упорный винт 12, освобождая маятник устройства, и по выходному электрическому сигналу преобразователя угла фиксируем нуль угла β. При изменении угла наклона рамы устройство покажет направление и величину этого углового отклонения.
Итак, в конструкции предлагаемого измерителя имеется «тяжелое сбалансированное тело» и механизм демпфирования горизонтального маятника относительно этого «тела» и, потому его динамические свойства в первом приближении и сам измеритель могут быть отнесены к типу устройств [1] со смешанным демпфированием маятника силами, пропорциональными относительной и абсолютной скорости.
При действии помехи в виде импульсного горизонтального ускорения, действующего в плоскости качания маятника, последний получает незначительное ложное отклонение β, которое вследствие демпфирования маятника относительно «жидкого тяжелого сбалансированного тела» быстро затухают. Маятник конструктивно выполнен набранным из N жестко соединенных между жестко соединенных между собой круговых тонких пластин, отстоящих друг от друга на расстоянии b, которые и образуют механизм демпфирования маятника относительно «жидкого сбалансированного тела» силами, пропорциональными абсолютной скорости, а от корпуса датчика - на заведомо большем расстоянии t.
Для удовлетворительных динамических характеристик измерителя угла в зависимости от вязкости применяемой демпфирующей жидкости подбирают рациональные значения количества пластин маятника N, а также величины зазоров t, b и диаметр датчика D. Так, для минерального масла ИС-30, вязкость которого существенно зависит от его температуры в диапазоне от 0°С до +40°С, рекомендуются основные параметры маятника: N=15, t=25 мм, b=15, D=300 мм.
Ссылка
1. Кузин Э.Н. «Автоматизация землеройно-планировочных машин», МАДИ, М., 2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик углов наклона | 1974 |
|
SU628403A1 |
| Устройство для определения углов наклона объектов | 1973 |
|
SU628402A1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2022 |
|
RU2807094C1 |
| Обращенная маятниковая система с гипертрофированным периодом колебания для определения угла отклонения от горизонтальной плоскости | 2020 |
|
RU2748648C1 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| Способ защиты от вибрации и устройство для его осуществления | 2017 |
|
RU2669914C2 |
| Вибрационная резонансная планетарно-шаровая мельница | 2022 |
|
RU2819319C1 |
| Устройство для определения угла наклона | 1989 |
|
SU1659706A1 |
| Датчик маятниковый | 1985 |
|
SU1332146A1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2014 |
|
RU2561229C1 |
Изобретение относится, в частности, к области транспортного строительства и может быть использовано при автоматизации, например, землеройно-транспортных машин, предназначенных для сооружения земляного полотна, а также устройства оснований и покрытий автомобильных дорог. Горизонтальный помехозащищенный маятниковый измеритель угла с высокой чувствительностью по отношению к полезному сигналу и демпфируемый силами, пропорциональными его «абсолютной скорости», отличающийся тем, что горизонтальный маятник состоит из выполненного в виде ламинированного набора круговых тонких пластин, одним концом закрепленных на оси, а другим на дебалансной планке, помещенный в закрытый цилиндрический герметичный корпус, выполненный в виде цилиндра, ось которого совпадает с осью маятника, полностью заполненный демпфирующей жидкостью, смонтирован на плите так, чтобы одна сторона корпуса была установлена на плите шарнирно, а другая сторона закреплена к плите регулировочным болтом, с помощью которого задается величина постоянного угла α, закрытый герметичной крышкой, в которой предусмотрены отверстия с защитными пробками, и преобразователь полезного угла β в электрический сигнал. Целью изобретения является объединение положительных качеств горизонтального маятника с вертикальным, обеспечив демпфирование маятника силами, пропорциональными «абсолютной» скорости. В результате предлагаемое устройство обладает высокой чувствительностью по отношению к полезному сигналу и увеличенный период колебаний, а также при действии помехи в виде импульсного горизонтального ускорения, действующего в плоскости качания маятника, последний получает незначительное ложное отклонение β, которое вследствие демпфирования маятника относительно «жидкого тяжелого сбалансированного тела» быстро затухает. 2 з.п. ф-лы, 3 ил.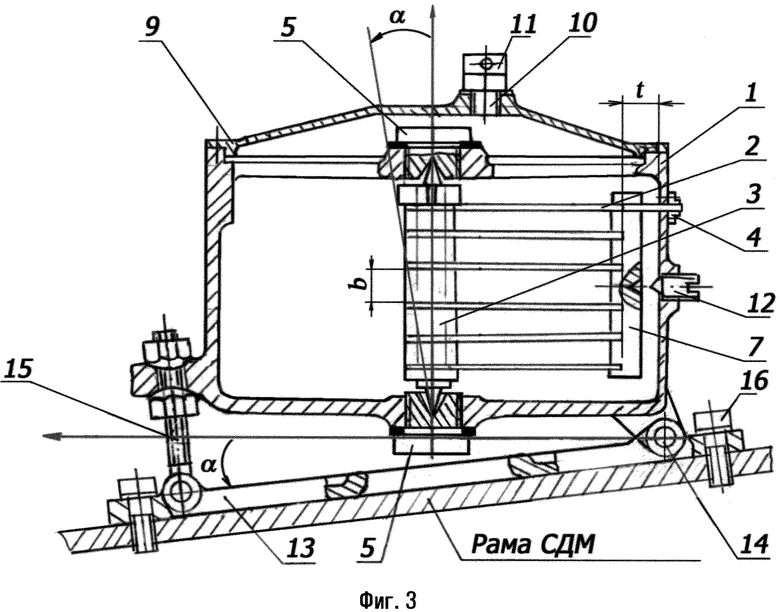
1. Горизонтальный помехозащищенный маятниковый измеритель угла с высокой чувствительностью по отношению к полезному сигналу и демпфируемый силами, пропорциональными его «абсолютной скорости», отличающийся тем, что горизонтальный маятник состоит из выполненного в виде ламинированного набора круговых тонких пластин, одним концом закрепленных на оси, а другим на дебалансной планке, помещенный в закрытый цилиндрический герметичный корпус, выполненный в виде цилиндра, ось которого совпадает с осью маятника, полностью заполненный демпфирующей жидкостью, смонтирован на плите так, чтобы одна сторона корпуса была установлена на плите шарнирно, а другая сторона закреплена к плите регулировочным болтом, с помощью которого задается величина постоянного угла α, закрытый герметичной крышкой, в которой предусмотрены отверстия с защитными пробками, и преобразователь полезного угла β в электрический сигнал.
2. Устройство по п. 1, отличающееся тем, что маятник выполнен набранным из N жестко соединенных между собой круговых тонких пластин, отстоящих друг от друга на расстоянии b, а от корпуса датчика - на заведомо большем расстоянии t.
3. Устройство по п. 1, отличающееся тем, что роль тяжелого сбалансированного тела, относительно которого демпфируется горизонтальный маятник, выполняет демпфирующая жидкость.
| 0 |
|
SU231132A1 | |
| КУЗИН Э.Н | |||
| "Автоматизация землеройно-планировочных машин", под общей редакцией член-корр | |||
| РАН В.М.Приходько.-М.:МАДИ, 2008 | |||
| WO 9415174 A1, 07.07.1994 | |||
| Маятниковый датчик наклона | 1987 |
|
SU1530900A1 |
| Газогенератор непрерывного процесса для газификации отходов нефтеперерабатывающих заводов | 1946 |
|
SU72321A1 |
| DE 3326618 A1, 09.02.1984. | |||

