Изобретение относится к устройствам для измерения отклонения объекта в вертикальной плоскости и может быть использовано для контроля и выправки положения железнодорожного полотна.
Известен индикатор положения маятниковый (ИПМ-1) производства завода «Сибтензоприбор» г.Топки [Инструкция по эксплуатации и техническое описание с паспортом А288.02.00.000 ПС]. Он состоит из линейного акселерометра с горизонтально расположенной осью чувствительности, выход которого соединен с фильтром нижних частот, предназначенным для подавления вибрационной составляющей сигнала, так как в большинстве случаев работа датчика уровня осуществляется одновременно с вибрационным уплотнением балласта рабочими органами путевой машины.
Основными параметрами фильтров нижних частот являются ширина полосы пропускания, степень подавления сигнала в полосе задерживания и реакция фильтра на единичное импульсное воздействие.
Недостатком прибора является то, что значения параметров и структура фильтра нижних частот определяются такими характеристиками путевых машин, как скорость движения в рабочем режиме, а также частота и амплитуда основной гармоники вибрации подбивочного блока, и должны выбираться для конкретного типа машины.
Прототипом является маятниковый датчик уровня ELT-133.00 фирмы «Plasser & Thuerer» (Австрия) [Распопов В.Я., Иванов Ю.В., Зотов С.А. Датчики уровня систем управления выправочных железнодорожных машин // Датчики и системы - 1999. - №4. - С.40-43.]. Он содержит массивный маятник, корпус, в нижней части которого имеется ванна, профиль которой повторяет профиль нижней части маятника по его радиусу. В ванне находится демпфирующая жидкость. Подвес маятника в корпусе выполнен с помощью оси, жестко связанной с маятником и двух шарикоподшипниковых опор. С осью подвеса маятника связана ось вращения потенциометрического датчика угла.
Работа маятникового датчика осуществляется одновременно с вибрационным уплотнением балласта рабочими органами путевой машины. Виброблоки путевой машины создают линейную вибрацию, имеющую как вертикальную, так и горизонтальную составляющие. Совместное воздействие горизонтальной и вертикальной вибраций («косая вибрация») приводит к смещению положения равновесия маятника, которое получило название «вибрационный сдвиг нуля».
Таким образом, к недостаткам прибора можно отнести наличие у него значительной погрешности, обусловленной вибрационным сдвигом нуля маятника, которая ограничивает возможности его применения.
Задачей предлагаемого устройства является расширение возможностей применения измерителя угла при больших значениях линейной вибрации за счет компенсации вибрационного сдвига нуля маятника в показаниях прибора.
Предлагаемый маятниковый датчик уровня содержит массивный маятник, ванну с демпфирующей жидкостью, ось подвеса, две шарикоподшипниковые опоры, датчик угла, два акселерометра, вычислитель, причем акселерометры расположены на маятнике так, что ось чувствительности одного направлена горизонтально и перпендикулярно оси подвеса маятника, а ось чувствительности другого акселерометра направлена вертикально, выходы первого и второго акселерометра соединены с первым и вторым входами вычислителя соответственно, выход датчика угла соединен с третьим входом вычислителя.
Сущность предлагаемого изобретения заключается в том, что акселерометры, установленные на маятнике, измеряют вертикальную и горизонтальную составляющие ускорения вибрации. По этим составляющим в вычислителе определяется результирующий вектор вибрационного перемещения точки подвеса маятника и угол, который он составляет с линией горизонта. По этим параметрам вычисляется значение угла отклонения маятника от горизонта под действием косой вибрации, которое вычитается из показаний датчика угла.
На фиг.1 показана структурная схема маятникового датчика уровня с компенсацией вибрационного сдвига нуля.
Маятниковый датчик уровня содержит массивный маятник 1, ванну с демпфирующей жидкостью 2, ось подвеса 3, две шарикоподшипниковые опоры 4, датчик угла 5, два акселерометра 6, 7, вычислитель 8, причем акселерометры 6 и 7 расположены на маятнике так, что ось чувствительности акселерометра 6 направлена горизонтально и перпендикулярно оси подвеса маятника, а ось чувствительности акселерометра 7 направлена вертикально, выходы акселерометров 6 и 7 соединены с первым и вторым входами вычислителя 8 соответственно, а выход датчика угла 5 соединен с третьим входом вычислителя 8.
Работа устройства происходит следующим образом.
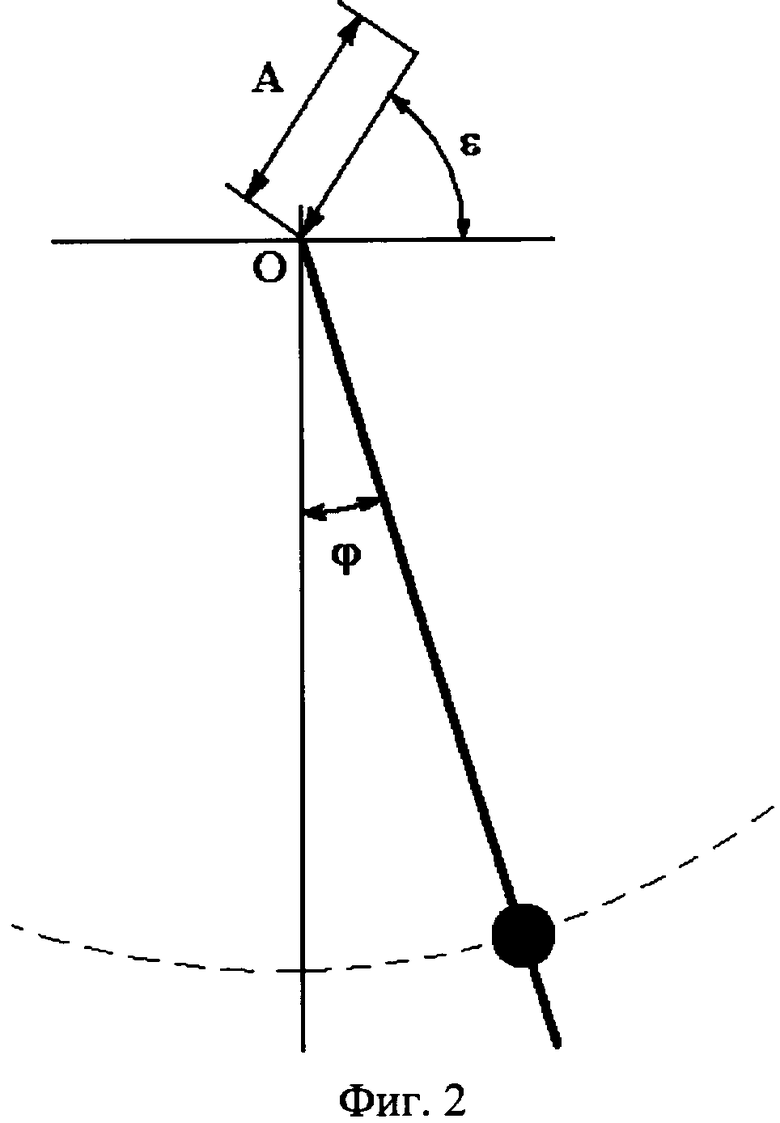
При наличии «косой вибрации» результирующий вектор вибрационного перемещения А точки подвеса маятника составляет некоторый угол ε с линией горизонта, как показано на фиг.2. Совместное воздействие горизонтальной и вертикальной вибраций приводит к смещению положения равновесия маятника. Угол смещения физического маятника от положения равновесия, обусловленный «вибрационным сдвигом нуля», можно рассчитать по формуле [Лунц Я.Л. Ошибки гироскопических приборов. - Л.: Судостроение, 1968. - 232 с.].

где А - амплитуда вибрационного перемещения точки подвеса маятника;
f - круговая частота вибрации;
m - масса маятника;
d - расстояние от центра тяжести маятника до оси подвеса;
ω0 - круговая частота собственных недемпфированных колебаний маятника;
J - момент инерции маятника относительно оси подвеса.
Учитывая, что вибрационное перемещение точки подвеса маятника изменяется по синусоидальной зависимости, амплитуду вибрационного перемещения можно выразить через амплитуду виброускорения  по формуле
по формуле

Частота вибрации f зависит от конструктивных особенностей путевых машин и для каждого конкретного типа машины известна.
Тогда с учетом выражения (2) формула (1) имеет вид

Виброускорение точки подвеса маятника  определяется по сигналам акселерометров 6 и 7 в вычислителе 8 по формуле
определяется по сигналам акселерометров 6 и 7 в вычислителе 8 по формуле

где  - вертикальная составляющая виброускорения точки подвеса маятника;
- вертикальная составляющая виброускорения точки подвеса маятника;
 - горизонтальная составляющая виброускорения точки подвеса маятника.
- горизонтальная составляющая виброускорения точки подвеса маятника.
Угол ε также определяется в вычислителе 8 по формуле

Остальные коэффициенты в выражении (2) являются конструктивными параметрами маятника и поэтому известны. Таким образом, по формуле (2) в вычислителе 8 может быть определено значение угла «вибрационного сдвига нуля» маятника. Вычитая полученное значение угла отклонения маятника, обусловленного «вибрационным сдвигом нуля» из значения угла, измеренного прибором, которое поступает в вычислитель 8 с выхода датчика угла 5, можно получить истинное значение превышения одного рельса над другим (в угловой или линейной мере).
Согласно формуле (1) для маятникового датчика уровня ELT-133.00, имеющего параметры m=10,216 кг, d=0,22 м, ω0=6,674 рад/с, J=0,49 кг·м2, при воздействии на него «косой» вибрации с амплитудой А=3·10-3 м, круговой частотой вибрации f=207,24 рад/с (33 Гц), углом наклона результирующего вектора вибрации к горизонту ε=45° вибрационный сдвиг нуля ϕ составляет 2,8 град. Вибрационный сдвиг нуля маятника представляет собой погрешность прибора, которая для данного примера в пересчете на превышение одного рельса над другим на базе 1520 мм составляет 73 мм (допустимая погрешность измерения составляет ±1 мм).
Таким образом, совокупность признаков предлагаемого устройства, реализация которых может быть выполнена в соответствии с фиг.1, позволяет расширить функциональные возможности измерителя угла при больших значениях линейной вибрации за счет компенсации вибрационного сдвига нуля маятника в показаниях прибора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты от вибрации и устройство для его осуществления | 2017 |
|
RU2669914C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАБИЛЬНОСТИ ПОЛОЖЕНИЯ ОСИ ЧУВСТВИТЕЛЬНОСТИ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1978 |
|
SU1839841A1 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ МАЯТНИКОВЫЙ ДАТЧИК УРОВНЯ | 2011 |
|
RU2478186C1 |
| СПОСОБ И УСТРОЙСТВО ПОСТРОЕНИЯ НЕВОЗМУЩАЕМОЙ БЕЗГИРОСКОПНОЙ ВЕРТИКАЛИ | 2002 |
|
RU2258907C2 |
| Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр | 2015 |
|
RU2615221C2 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2003 |
|
RU2258205C1 |
| ВЙВЛЙОТЕГСА | 1966 |
|
SU184465A1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
Изобретение относится к устройствам для измерения отклонения объекта в вертикальной плоскости и может быть использовано для контроля и выправки положения железнодорожного полотна. Сущность: маятниковый датчик уровня содержит массивный маятник, ванну с демпфирующей жидкостью, ось подвеса, две шарикоподшипниковые опоры, датчик угла. В эту схему введены два акселерометра и вычислитель. При этом акселерометры расположены на маятнике так, что ось чувствительности одного направлена горизонтально и перпендикулярно оси подвеса маятника, а ось чувствительности другого акселерометра направлена вертикально, выходы первого и второго акселерометра соединены с первым и вторым входами вычислителя соответственно, выход датчика угла соединен с третьим входом вычислителя. Акселерометры, установленные на маятнике, измеряют вертикальную и горизонтальную составляющие ускорения вибрации. По этим составляющим в вычислителе определяется результирующий вектор вибрационного перемещения точки подвеса маятника и угол, который он составляет с линией горизонта. По этим параметрам вычисляется значение угла отклонения маятника от горизонта под действием косой вибрации, которое вычитается из показаний датчика угла. Технический результат: расширение функциональных возможностей применения датчика уровня при больших значениях линейной вибрации за счет компенсации вибрационного сдвига нуля маятника в показаниях прибора. 2 ил.
Маятниковый датчик уровня, содержащий массивный маятник, ванну с демпфирующей жидкостью, ось подвеса, две шарикоподшипниковые опоры, датчик угла, отличающийся тем, что в него дополнительно введены два акселерометра и вычислитель, причем акселерометры расположены на маятнике так, что ось чувствительности одного направлена горизонтально и перпендикулярно оси подвеса маятника, а ось чувствительности другого акселерометра направлена вертикально, выходы первого и второго акселерометра соединены с первым и вторым входом вычислителя соответственно, выход датчика угла соединен с третьим входом вычислителя.
| 0 |
|
SU195135A1 | |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2105952C1 |
| Маятниковый кренодифферентометр | 1990 |
|
SU1774169A1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ГИБКИХ ТРУБ | 2013 |
|
RU2541366C1 |

