Изобретение касается радиотехнических измерений и может найти применение в комплексных радиолокационных измерителях скорости и высоты полета различных летательных аппаратов.
Известно устройство измерения частоты и временной задержки радиосигнала. Низкочастотная часть известного устройства содержит каналы измерения доплеровской частоты и временной задержки непрерывного радиосигнала с частотной модуляцией, отраженного от зондируемой поверхности. Измерение доплеровского смещения частоты производится с помощью квадратурного смесителя, схемы преобразования и узкополосного фильтра на частоте, кратной частоте модуляции радиосигнала. Канал измерения временной задержки содержит полосовой усилитель, фильтр подавления, квадратор-фильтр и фазометр. Измерение временной задержки (фазы) радиосигнала производится на частоте, в два раза превышающей частоту, кратную частоте модуляции.
Известное устройство имеет низкую помехоустойчивость и точность измерения при малом отношении сигнал/шум, обусловленные тем, что энергия принятого устройством отраженного от зондируемой поверхности сигнала используется при обработке неполностью. Поэтому устройство неэффективно использует энергию принятого сигнала. Кроме того, устройство сложно в настройке и имеет невысокую инструментальную точность измерения параметров сигнала, так как реализовано на аналоговых элементах.
Известное устройство не позволяет измерять параметры Ω и τ с достаточной точностью. Это связано с тем, что ошибка оценивания по параметру τ после преобразования приводится к виду:
εkτ= sin((Ω- )tk) sin ν(τ-
)tk) sin ν(τ- )
)
Отсюда видно, что оценивание τ зависит от точности оценивания параметра Ω Переход функции sin(Ω- ) tк через 0 вызывает увеличение ошибок фильтрации τ.
) tк через 0 вызывает увеличение ошибок фильтрации τ.
Кроме того, использование одноканальной обработки входного сигнала при оценивании Ω снижает отношение сигнал/шум, понижает помехоустойчивость устройства, увеличивает ошибки оценивания.
Целью изобретения является повышение помехоустойчивости и точности измерения параметров сигнала.
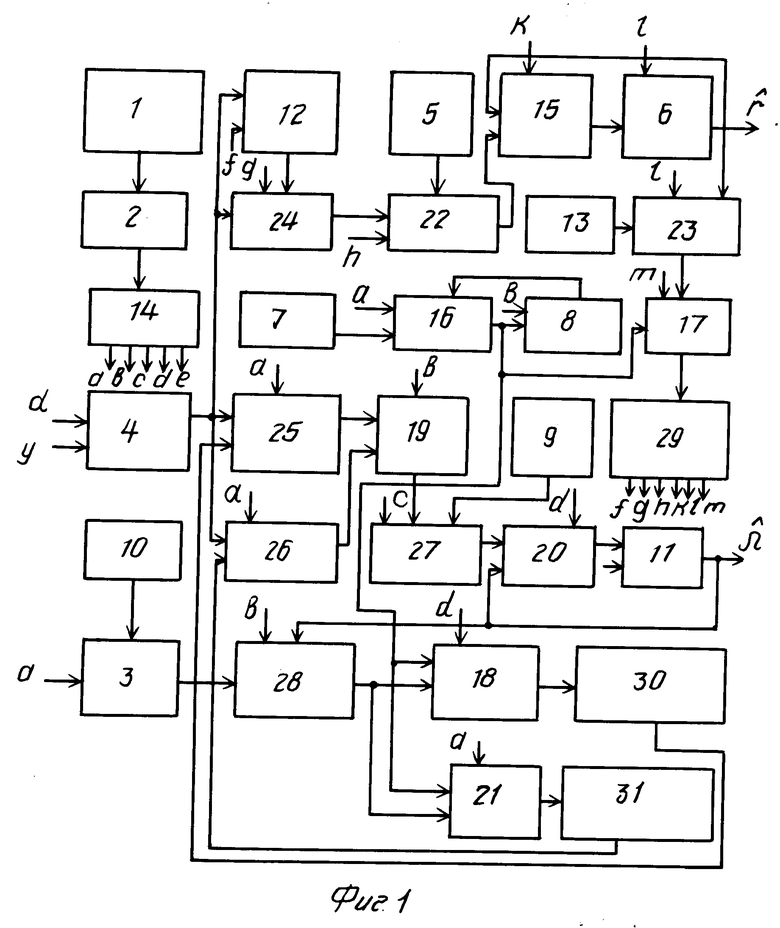
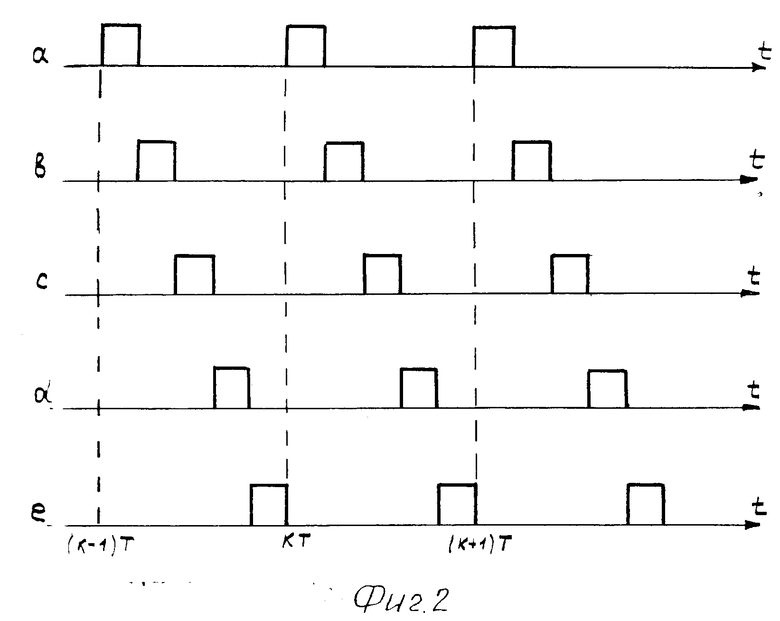
На фиг. 1 представлена функциональная схема измерителя; на фиг. 2 временные диаграммы выходных сигналов дешифратора; на фиг. 3 временные диаграммы выходных сигналов первого преобразователя фазы.
Устройство содержит (см. фиг. 1) генератор тактовых импульсов 1, первый 2 и второй 3 счетчики импульсов, преобразователь напряжение-код 4, первый 5, второй 6, третий 7, четвертый 8, пятый 9, шестой 10, седьмой 11, восьмой 12, девятый 13, регистры, дешифратор 14, первый 15, второй 16, третий 17, четвертый 18, пятый 19, шестой 20, седьмой 21 сумматоры, первый 22, второй 23, третий 24, четвертый 25, пятый 26, шестой 27, седьмой 28 умножители, первый 29, второй 30, третий 31 преобразователи фазы.
Все элементы устройства представляют собой стандартные цифровые элементы радиоэлектроники.
Генератор тактовых импульсов 1 стандартный кварцевый генератор, формирующий стабильную последовательность импульсов.
Первый и второй счетчики 2 и 3 стандартные цифровые многоразрядные двоичные счетчики импульсов.
Преобразователь напряжение-код 4 стандартный аналого-цифровой преобразователь.
Регистры 5 13 стандартные цифровые регистры записи и хранения параллельных двоичных кодов.
Дешифратор 14 стандартный цифровой преобразователь позиционного кода в унитарный.
Сумматоры 15 21 стандартные элементы суммирования двух чисел в параллельном двоичном коде.
Умножители 22 28 стандартные цифровые однотактные элементы умножения двух чисел в параллельном коде.
Преобразователи фазы 29 31 стандартные цифровые постоянные запоминающие устройства, работающие в режиме чтения информации.
Устройство измерения работает следующим образом.
На вход устройства первый вход преобразователя напряжение-код 4 поступает переменное напряжение y(t) S(t) + ζ (t), где S(t) полезный радиосигнал параметры которого, частота и временная задержка подлежат измерению; ζ (t) помеха; t текущее время наблюдения сигнала. Полезный сигнал S(t) имеет следующую структуру:
S(t) Ao{cos[ ν (t-τ)+Ω t+Ψ (t)]
cos[ ν (t-τ)-Ω t-Ψ (t)] где ν частота модуляции;
τ задержка сигнала, подлежащая измерению;
Ω неизвестное постоянное смещение частоты, подлежащее измерению;
Ψ (t) случайная фаза сигнала;
Ао амплитуда сигнала.
Подобный вид имеет отраженный сигнал основной гармоники на выходе УПЧ радиоприемного устройства.
Сигнал S(t) после тригонометрических преобразований преобразуется к виду
S(t) 2Ao cos( Ω t+Ψ (t) ω (ν (t-τ))
Acos( Ω t+Ψ (t)) cos (ν (t-τ)), (1) где А амплитуда сигнала (1).
Преобразователь напряжение-код 4 преобразует случайное напряжение (1) в дискретные моменты времени tк КТ, К 0, 1, 2, (Т период дискретизации) в цифровой код yk Моменты преобразования tkопределяются импульсами, подаваемыми в преобразователь напряжение-код 4 с четвертого выхода дешифратора 14. Цифровая последовательность отсчетов сигнала yk используется для выделения информации о величинах частоты Ω и временной задержки τ.
Измерение частоты Ω и временной задержки τ в предлагаемом измерителе производится на основе реализации алгоритма, определяемого следующим образом.
Для оценки Ω используются следующие выражения: =
=  + KΩεkΩ, где K
+ KΩεkΩ, где K постоянный коэффициент;
постоянный коэффициент;
εkΩ= yk(sin( -ν)tk+ sin (
-ν)tk+ sin ( +ν)tk) ошибка измерения. Величина
+ν)tk) ошибка измерения. Величина 
 после тригонометрических преобразований сводится к виду
после тригонометрических преобразований сводится к виду sin(Ω-
sin(Ω- )tk
)tk
Для оценки  применяются следующие соотношения:
применяются следующие соотношения: =
=  + kτεkτ где значение
+ kτεkτ где значение 
 формируется так: отсчеты входного сигнала ykстробируются в два момента времени, соответствующих переходу функции cos ν (tk-
формируется так: отсчеты входного сигнала ykстробируются в два момента времени, соответствующих переходу функции cos ν (tk- ) через 0 и через максимум. При этом значения соответственно равны:
) через 0 и через максимум. При этом значения соответственно равны:
yk= cos Ωt sinν ( - τ) (1)
- τ) (1)
yk= cosΩt cos ν ( - τ)≈ cos Ωt, (2) так как
- τ)≈ cos Ωt, (2) так как  τk.
τk.
Значение 
 преобразуется к виду:
преобразуется к виду: c
c


 так как сигнал двойной частоты cos2Ω t отфильтровывается устройством. Работа блоков и элементов измерителя тактируется выходными сигналами дешифратора 14 и первого преобразователя фазы 29. Генератор тактовых импульсов 1 вырабатывает равномерную последовательность импульсов со стабильным периодом повторения. Эти импульсы поступают на счетный вход первого счетчика 2. Разрядные выходы счетчика 2 связаны со входами дешифратора 14, который вырабатывает управляющие тактирующие сигналы: a, b, c, d, e (см. фиг. 2) по соответствующим выходам 1, 2, 3, 4, 5. Тактирующие сигналы по фазе относительно друг друга сдвинуты и используются для синхронизации работы устройства при оценивании параметра
так как сигнал двойной частоты cos2Ω t отфильтровывается устройством. Работа блоков и элементов измерителя тактируется выходными сигналами дешифратора 14 и первого преобразователя фазы 29. Генератор тактовых импульсов 1 вырабатывает равномерную последовательность импульсов со стабильным периодом повторения. Эти импульсы поступают на счетный вход первого счетчика 2. Разрядные выходы счетчика 2 связаны со входами дешифратора 14, который вырабатывает управляющие тактирующие сигналы: a, b, c, d, e (см. фиг. 2) по соответствующим выходам 1, 2, 3, 4, 5. Тактирующие сигналы по фазе относительно друг друга сдвинуты и используются для синхронизации работы устройства при оценивании параметра  .
.
Тактирование блоков, измеряющих параметр  , производится сигналами с выхода первого преобразователя фазы 29 (см. фиг. 3). Это ПЗУ, на адресные входы которого подаются отсчеты ν(tk-
, производится сигналами с выхода первого преобразователя фазы 29 (см. фиг. 3). Это ПЗУ, на адресные входы которого подаются отсчеты ν(tk-  ). Измерение
). Измерение  производится блоками 5-8, 12, 13, 15 17, 22 24, 29. Цифровые отсчеты входного сигнала с выхода ПНК 4 поступают на информационные входы восьмого регистра 12 и третьего умножителя 24. Запись отсчета сигнала в регистр 12 производится по импульсу fc первого преобразователя фазы 29 (переход функции cos ν(tk-
производится блоками 5-8, 12, 13, 15 17, 22 24, 29. Цифровые отсчеты входного сигнала с выхода ПНК 4 поступают на информационные входы восьмого регистра 12 и третьего умножителя 24. Запись отсчета сигнала в регистр 12 производится по импульсу fc первого преобразователя фазы 29 (переход функции cos ν(tk-  ) через 0). Запись отсчета yk при переходе cos ν(tk-
) через 0). Запись отсчета yk при переходе cos ν(tk-  ) через максимум происходит по сигналу g в умножитель 24. При этом производится умножение этого отсчета на содержимое регистра 12. Результат умножения
) через максимум происходит по сигналу g в умножитель 24. При этом производится умножение этого отсчета на содержимое регистра 12. Результат умножения 
 умножается в первом умножителе 22 на коэффициент из регистра 5 по импульсу h.
умножается в первом умножителе 22 на коэффициент из регистра 5 по импульсу h.
В первом сумматоре 15 и втором регистре 6 выполняется рекуррентный алгоритм  =
=  + kτεkτ. При этом на выходе регистра 6 имеет место оценка параметра τ. Последовательность импульсов для тактирования вычисления оценки записана в первом преобразователе фазы 29. Это ПЗУ, на адресные входы которого поступают значения фазы ν(tk-
+ kτεkτ. При этом на выходе регистра 6 имеет место оценка параметра τ. Последовательность импульсов для тактирования вычисления оценки записана в первом преобразователе фазы 29. Это ПЗУ, на адресные входы которого поступают значения фазы ν(tk-  ), которые вычисляются в третьем сумматоре 17. Слагаемое -
), которые вычисляются в третьем сумматоре 17. Слагаемое - вычисляется во втором умножителе 23 умножением оценки
вычисляется во втором умножителе 23 умножением оценки  на значение ν, код которого хранится в девятом регистре 13. Значение ν tkвычисляется вторым сумматором 16 по рекуррентному алгоритму νtk νtk-1+ ν T. Шаг отсчета ν Т хранится в третьем регистре 7. В сумматоре 16 этот код складывается с кодом предыдущего значения ν tk-1 из регистра 8 и новое значение фазы ν tk записывается в этот же регистр.
на значение ν, код которого хранится в девятом регистре 13. Значение ν tkвычисляется вторым сумматором 16 по рекуррентному алгоритму νtk νtk-1+ ν T. Шаг отсчета ν Т хранится в третьем регистре 7. В сумматоре 16 этот код складывается с кодом предыдущего значения ν tk-1 из регистра 8 и новое значение фазы ν tk записывается в этот же регистр.
Оценивание параметра Ω производится блоками 3, 7 11, 16, 18 21, 25 28, 30, 31 устройства. Применяется двухканальная обработка входного сигнала. Вычисление фазы  tk производится блоками 3, 10, 28. Здесь используется прямое вычисление фазы
tk производится блоками 3, 10, 28. Здесь используется прямое вычисление фазы =
=  tk=
tk=  kT (2) а не рекуррентный алгоритм, как в сравниваемом измерителе. Это связано с тем, что применение рекуррентного метода вычисления фазы в случае
kT (2) а не рекуррентный алгоритм, как в сравниваемом измерителе. Это связано с тем, что применение рекуррентного метода вычисления фазы в случае  const const приводит к неустойчивости системы ФАПЧ (устройство измерения Ω является ФАПЧ). Однако при применении формулы (2) в случае большого значения К небольшие изменения
const const приводит к неустойчивости системы ФАПЧ (устройство измерения Ω является ФАПЧ). Однако при применении формулы (2) в случае большого значения К небольшие изменения  вызывают значительные приращения фазы θк, что приводит к большим ошибкам слежения за параметром Ω Одним из методов преодоления этого недостатка является принудительное сбрасывание текущего времени tk, но не до 0, а до некоторого значения to. Это значение хранится в шестом регистре 10. Второй счетчик 3 производит наращивание шага (текущего времени) от значения to до конечного значения tкон. При достижении tк tкон производится запись в счетчик значения to. Для этого сигнал переноса счетчика соединен с входом записи в счетчик. Тактирование (счетный режим) производится с дешифратора 14. Код с выхода счетчика поступает на вход седьмого умножителя 28, на другой вход которого поступает код оценки
вызывают значительные приращения фазы θк, что приводит к большим ошибкам слежения за параметром Ω Одним из методов преодоления этого недостатка является принудительное сбрасывание текущего времени tk, но не до 0, а до некоторого значения to. Это значение хранится в шестом регистре 10. Второй счетчик 3 производит наращивание шага (текущего времени) от значения to до конечного значения tкон. При достижении tк tкон производится запись в счетчик значения to. Для этого сигнал переноса счетчика соединен с входом записи в счетчик. Тактирование (счетный режим) производится с дешифратора 14. Код с выхода счетчика поступает на вход седьмого умножителя 28, на другой вход которого поступает код оценки  . По импульсу b на выходе умножителя 28 появляется код выражения
. По импульсу b на выходе умножителя 28 появляется код выражения  tк. Этот код в четвертом сумматоре 18 складывается с кодом νtк с выхода второго сумматора 16, а в седьмом сумматоре 21 вычисляется разность
tк. Этот код в четвертом сумматоре 18 складывается с кодом νtк с выхода второго сумматора 16, а в седьмом сумматоре 21 вычисляется разность  tк ν tк. Результаты суммирования/вычитания поступают на адресные входы второго 30 и третьего 31 преобразователей фазы, на выходе которых появляется код значений sin (
tк ν tк. Результаты суммирования/вычитания поступают на адресные входы второго 30 и третьего 31 преобразователей фазы, на выходе которых появляется код значений sin ( +ν)tk и sin (
+ν)tk и sin ( -ν)tk. Эти значения умножаются на цифровые значения yк в четвертом 25 и пятом 26 умножителях. Результаты умножения складываются в пятом сумматоре 19, на выходе которого получается код величины
-ν)tk. Эти значения умножаются на цифровые значения yк в четвертом 25 и пятом 26 умножителях. Результаты умножения складываются в пятом сумматоре 19, на выходе которого получается код величины 
 . Умножение значения
. Умножение значения 
 на коэффициент усиления K
на коэффициент усиления K , хранящийся в пятом регистре 9, производится умножителем 27. Рекуррентный алгоритм вычисления оценки
, хранящийся в пятом регистре 9, производится умножителем 27. Рекуррентный алгоритм вычисления оценки  =
=  + kΩεkΩ производится шестым сумматором 20. Оценка
+ kΩεkΩ производится шестым сумматором 20. Оценка  записывается в седьмой регистр 11.
записывается в седьмой регистр 11.
Таким образом, на выходах устройства присутствует код оценки параметров τ и Ω, причем оценивание производится с большей точностью, чем в известном устройстве за счет раздельного вычисления параметров  и
и  , двухканальной обработки сигнала при фильтрации
, двухканальной обработки сигнала при фильтрации  , прямого вычисления фазы
, прямого вычисления фазы 
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ЧАСТОТЫ | 1989 |
|
SU1589810A1 |
| УНИВЕРСАЛЬНЫЙ ГЕНЕРАТОР СИГНАЛОВ ПРОИЗВОЛЬНОЙ ФОРМЫ | 1994 |
|
RU2060536C1 |
| ПАССИВНАЯ ПЕЛЕНГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2298803C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ НИЗКОЧАСТОТНЫХ ДОПЛЕРОВСКИХ СИГНАЛОВ | 1985 |
|
SU1281125A1 |
| Следящая система | 1987 |
|
SU1631513A1 |
| ЦИФРОВОЙ ПРИЕМНИК ДИСКРЕТНО-НЕПРЕРЫВНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ С АДАПТАЦИЕЙ ЧАСТОТЫ ДИСКРЕТИЗАЦИИ | 2007 |
|
RU2365036C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПСЕВДОСЛУЧАЙНОГО СИГНАЛА | 1989 |
|
SU1692272A1 |
| Устройство синхронизации опорного колебания высокоскоростного модема | 1991 |
|
SU1800634A1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ГАРМОНИКИ НАПРЯЖЕНИЯ | 1990 |
|
RU2030753C1 |
| Цифровой измеритель показателей качества электрической энергии трехфазной сети | 1988 |
|
SU1633368A1 |
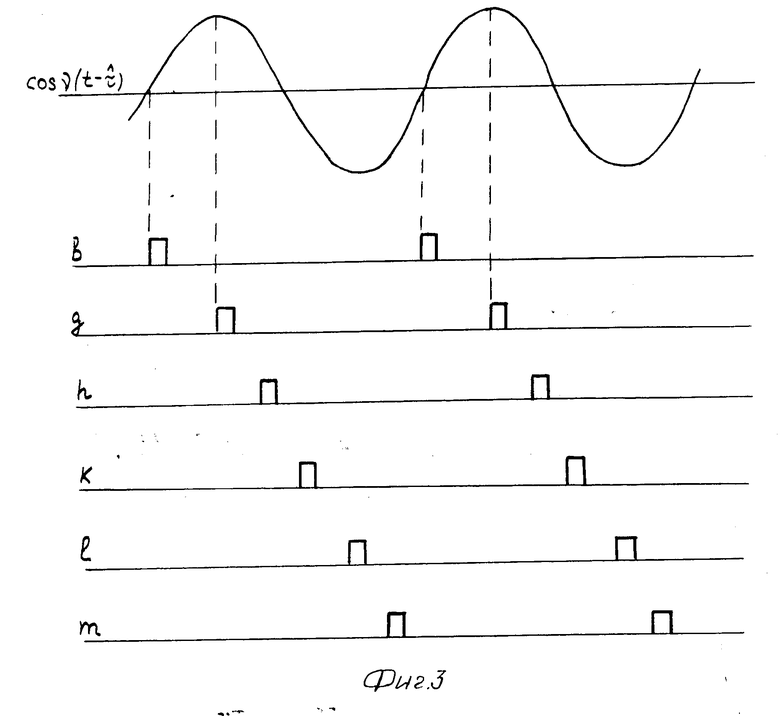
Использование: в комплексных радиолокационных измерителях скорости и высоты полета различных летательных аппаратов. Сущность изобретения: устройство содержит генератор тактовых импульсов, два счетчика, преобразователь напряжение-код, девять регистров, дешифратор, семь сумматоров, семь умножителей, три преобразователя фазы, что позволяет повысить помехоустойчивость и точность измерения параметров сигнала. 3 ил.
УСТРОЙСТВО ИЗМЕРЕНИЯ ЧАСТОТЫ И ВРЕМЕННОЙ ЗАДЕРЖКИ РАДИОСИГНАЛА, содержащее генератор тактовых импульсов, первый преобразователь фазы, отличающееся тем, что в него введены первый и второй счетчики, дешифратор, преобразователь напряжение-код, семь сумматоров, девять регистров, семь умножителей, второй и третий преобразователи фазы, при этом выход генератора тактовых импульсов подключен к счетному входу первого счетчика, информационный выход которого подключен к входу дешифратора, выходы которого подключены к синхронизирующим входам соответственно, первый выход второго сумматора, второй выход четвертого регистра, четвертый выход преобразователя напряжение-код и четвертого сумматора, выход которого соединен с входом второго преобразователя фазы, выход седьмого регистра является выходом оценки постоянной частоты устройства, вход преобразователя напряжение-код является входом устройства, выход первого регистра соединен с первым входом первого умножителя, выход которого соединен с первым входом первого сумматора, выход которого соединен с входом данных второго регистра, выход которого является выходом оценки временной задержки сигнала и соединен с первым входом второго умножителя, выход которого подключен к первому входу третьего сумматора, выход которого подключен к выходу первого преобразователя фазы, выход третьего регистра подключен к первому входу второго сумматора, второй вход которого соединен с выходом четвертого регистра, а выход с входом данных четвертого регистра и с вторым входом третьего сумматора, выход преобразователя фазы подключен к второму входу четвертого умножителя, первый вход которого соединен с выходом преобразователя напряжение-код и с первым входом пятого умножителя, выход третьего преобразователя фазы подключен к второму входу пятого умножителя, первый вход которого подключен к второму входу третьего умножителя и входу данных восьмого регистра, а выход соединен с вторым входом пятого сумматора, пятый вход которого соединен с выходом четвертого умножителя, а выход с первым входом шестого умножителя, второй вход которого соединен с выходом пятого регистра, а выход подключен к первому входу шестого сумматора, выход которого подключен к входу данных седьмого регистра, выход которого соединен с вторыми входами шестого сумматора и седьмого умножителя, первый вход седьмого умножителя подключен к выходу данных второго счетчика, а выход к вторым входам четвертого и седьмого сумматоров, выход восьмого регистра соединен с первым входом третьего умножителя, выход которого соединен с вторым входом первого умножителя, выход второго регистра подключен к второму выходу первого сумматора, выход девятого регистра соединен с вторым входом второго умножителя, выход седьмого сумматора с входом третьего преобразователя фазы, выход второго сумматора подключен к первым входам четвертого и седьмого сумматора, первый выход дешифратора подключен к синхронизирующим входам четвертого и пятого умножителей, второго счетчика, второй выход дешифратора подключен к синхронизирующим входам пятого сумматора и седьмого умножителя, третий выход дешифратора подключен к синхронизирующему входу шестого умножителя, четвертый выход дешифратора подключен к синхронизирующим входам шестого и седьмого сумматоров, пятый выход дешифратора соединен с синхронизирующим входом седьмого регистра, первый выход первого преобразователя фазы подключен к синхронизирующему входу восьмого регистра, второй выход к синхронизирующему входу третьего умножителя, третий выход к синхронизирующему входу первого умножителя, четвертый выход к синхронизирующему входу первого сумматора, пятый выход к синхронизирующим входам второго регистра и второго умножителя и второго умножителя, шестой выход соединен с синхронизирующим входом третьего сумматора, выход шестого регистра соединен с входом данных второго счетчика.
| Колчинский В | |||
| Е | |||
| и др | |||
| Автономные доплеровские устройства и системы навигации летательных аппаратов | |||
| М.: Сов | |||
| радио, 1975, с.143. |
