Изобретение относится к электромеханике, а именно к прецизионным следящим системам постоянного тока с моментными вентильными электродвигателями со слежением по углу поворота, и может быть применено в приборных системах и в системах автоматического управления.
Цель изобретения - повышение точности и быстродействия системы.
На фиг. 1 приведена функциональная схема следящей системы; на фиг. 2 - графики сигналов элементов системы; на фиг. 3 и 4 - графики входного, промежуточного и выходного сигналов следящей системы при линейном и квадратическом входных сигналах; на фиг. 5 - графики входного и промежуточного сигналов при входном сигнале в виде кубического полинома; на фиг. 6 - функциональная схема регулятора с электродвигателем постоянного тока.
Следящая система (фиг. 1) содержит мо- ментный вентильный электродвигатель 1 с обмотками 2 и 3 якоря и ротором-индуктором 4, первый и второй усилители 5 и 6 мощности, первый и второй датчики 7 и 8 тока, датчик 9 положения, датчик 10 скорости, объект 11 управления, первый сумматор12,синусно-косинусный преобразователь 13, первый и второй умножители 14 и 15, первый и второй интеграторы 16 и 17, первый и второй компараторы 18 и 19, первый и второй ключи 20 и 21, генератор 22 тактовых импульсов, счетчик 23 импульсов, дешифратор 24, формирователь 25 импульсов, с первого по четвертый регистры 26 - 29, с первого по четвертый цифро- аналоговые преобразователи 30 - 33, второй и третий сумматоры 34 и 35, задатчик , 36 и аналого-цифровой преобразователь 37,
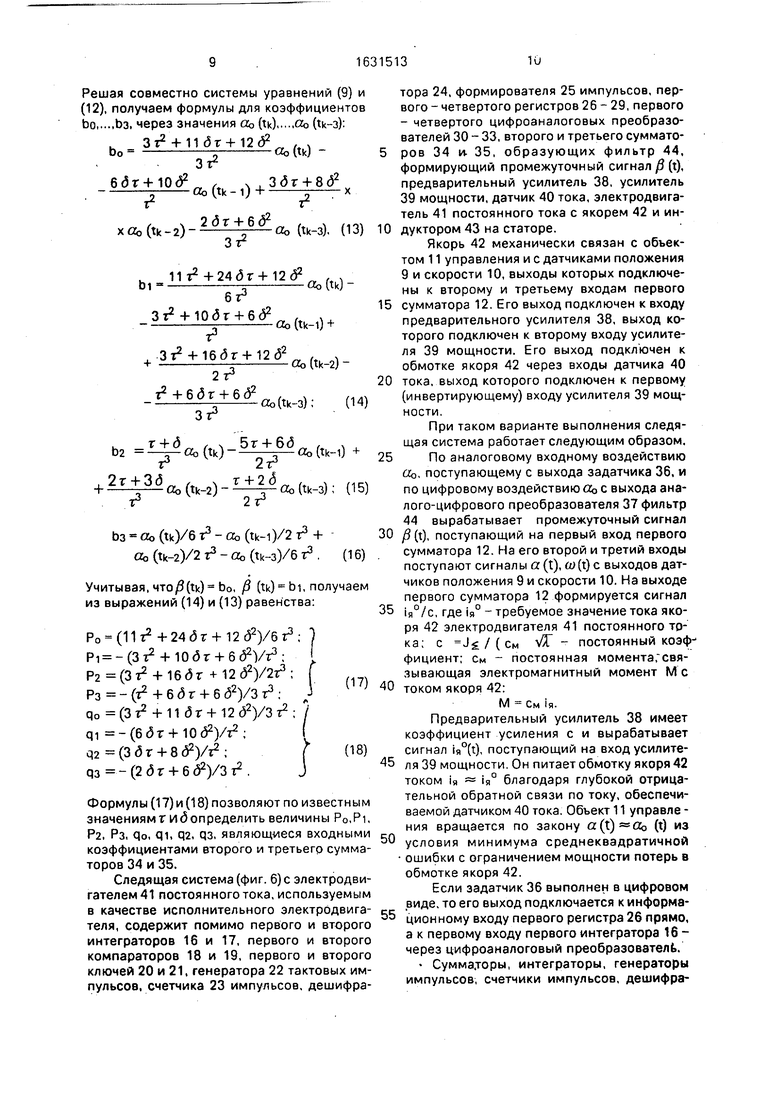
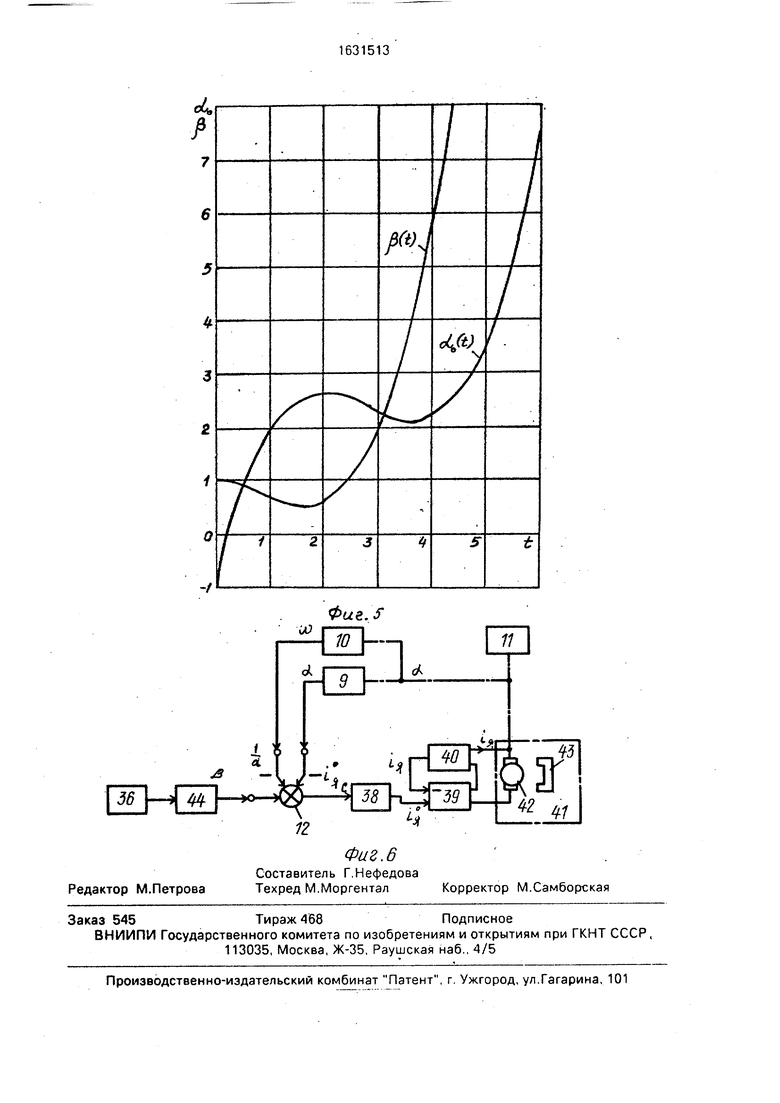
Схема регулятора с электродвигателем (фиг. 6) содержит предварительный усилитель 38, усилитель 39 мощности, датчик 40 тока, электродвигатель 41 постоянного тока с якорем 42 и индуктором на статоре 43 и фильтр 44.
На фиг. 1 и 6 приняты следующие обозначения: «о - задающее воздействие; ее - регулируемая координата; со- скорость вращения; Uo - амплитуда выходных сигналов компараторов 18 и 19; 2а2,2а , 2а - коэффициенты по первому, четвертому и третьему входам первого интегратора выходной сигнал второго интегратора 17;p(tk) и /3(tk) выходные сигналы второго и третьего сумматоров 34 и 35; 1 /а - коэффициент по третьему входу первого сумматора 12; Р0, Pi, P2, Рз - коэффициенты по первому, второму, третьему и четвертому входам второго сумматора 34; q0, qi, qa и qa - коэффициенты
по первому, второму, третьему и четвертому входам третьего сумматора 35; We - выходной сигнал первого сумматора 12; с cos pa и -с sin pa- выходные сигналы
синусно-косинусного преобразователя 13; IA° и в° - выходные сигналы первого и второго умножителей 14 и 15; )д и IB - выходные сигналы первого и второго датчиков 7 и 8 тока.
В качестве датчика 9 положения и датчика 10 скорости в данной системе применяются датчик углового положения и датчик угловой скорости (т.е. частоты вращения). Следящая система работает следующим образом.
Входной сигнал следящей системы о (т.) поступает с выхода задатчика 36 в аналоговой форме на первый вход первого интегратора 16, вырабатывающего сигнал fi (tj производную от сигнала fi (t). Сигнал р (t) поступает на первый вход второго интегратора 17, вырабатывающего сигнал / (t) - промежуточный сигнал следящей системы. Первый и второй интеграторы 16 и 17 охвачены обратными связями no/J и /Зс коэффициентами 2а и -2а2, а сигнал OQ (поступает на первый вход первого интегратора 16 с коэффициентом 2а2, где а 1 /Y4A ; А - коэффициент веса в минимизируемом функци
онале
V /(.
О)
где V h(a-ao)2+Arlm2 dt;
о
а см lm/JЈ ; А А г Д /см2;
а - угол поворота ротора-индуктора 4;
Т - время работы системы;
CM - постоянная момента электродвигателя 1, связывающая электромагнитный момент М с токами 1д, IB синусной и косинусной фаз обмотки якоря электродви- гателя 1;
М СМ(НА sin pa + iecospa);
50
р - число пар полюсов электродвигателя 1;
Im - амплитуда токов обмотки якоря; jЈ - суммарный момент инерции ротора-индуктора 4, датчиков положения 9 и скорости 10 и объекта 11 управления; г - активное сопротивление одной фазы обмотки 2 (или 3) якоря.
Сигналы Оо (t) и / (t) связаны уравнением
/ 2а2(а-Ј)+2аЈ(2)
или передаточной функцией
w. (e) Р (S) 1 ,
1() Ms) 2 52s2-2 5s-M (3)
где Ob (s),/3(s) - изображения по Лапласу сигналов оь (t), / (t) при нулевых начальных условиях:
1/2а;
s - комплексная переменная преобразования Лапласа.
Промежуточный сигнал /3 (t) поступает на первый вход первого сумматора 12. на второй и третий входы которого с выходов датчика 9 положения и датчика 10 скорости ротора-индуктора А подаются сигналы a(t) и o(t) с коэффициентами -1 и -2 д -1/а. На выходе первого сумматора 12 формируется сигнал lm/c, где U - амплитуда токов якоря электродвигателя 1;с J /(crnV T) - постоянный коэффициент, поступающий на первые входы первого и второго умножителей 14 и 15.
Сигнал, пропорциональный углу а поворота ротора, поступает с выхода датчика 9 положения на вход синусно-косинусного преобразователя 13, вырабатывающего сигналы -с sin р а и с cos р а, которые подаются на вторые входы первого и второго умножителей 14 и 15. На их выходах формируются оптимальные значения токов:
IA° -Im sinpa; в° U cospa, поступающие на вторые входы первого и второго усилителей 5 и б мощности, обеспечивающих с помощью первого и второго датчиков 7 и 8 тока протекание по обмоткам 2 и 3 якоря токов 1д IA°, is ie°. При этом электродвигатель 1 развивает момент
М см Im,
под действием которого ротор-индуктор 4 с объектом 11 управления приобретает угловое ускорение
a cMlm/Js. 2a2OS-a)-2aa, (4)
т.е. сигналы/(1) иа(т.) связаны передаточной функцией
e a(s)1
()2ffif +2(584-1
(5)
где a (s) - изображение по Лапласу угла поворота ротора-индуктора 4 a(t) при нулевых начальных условиях.
Сигналы оь (t) и a (t) связаны передаточной функцией следящей системы согласно равенствам (3) и (5)
w(s) wi(s) w(s) 1
a(s) «о (О
Аз4 + 1
или дифференциальным уравнением
A a + a Oo(t), которое является уравнением Эйлера.
Объект 11 управления вращается по заQ кону a(t)Oo(t) из условия минимума сред- неквадратической ошибки с ограничением мощности потерь в обмотке якоря электродвигателя 1.
Передаточная функция (3) имеет корни
5 характеристического уравнения si2 а ±ja, а 0, т.е. они соответствуют неустойчивой системе, нуждающейся в периодической коррекции, для которой предназначены первый и второй компараторы 18 и 19, пер0 вый и второй ключи 20 и 21, генератор 22 тактовых импульсов, счетчик 23 импульсов, дешифратор 24, формирователь 25 импульсов, с первого по четвертый регистры 26 - 29, с первого по четвертый цифроаналого5 вые преобразователи 30 - 33 и второй и третий сумматоры 34 и 35.
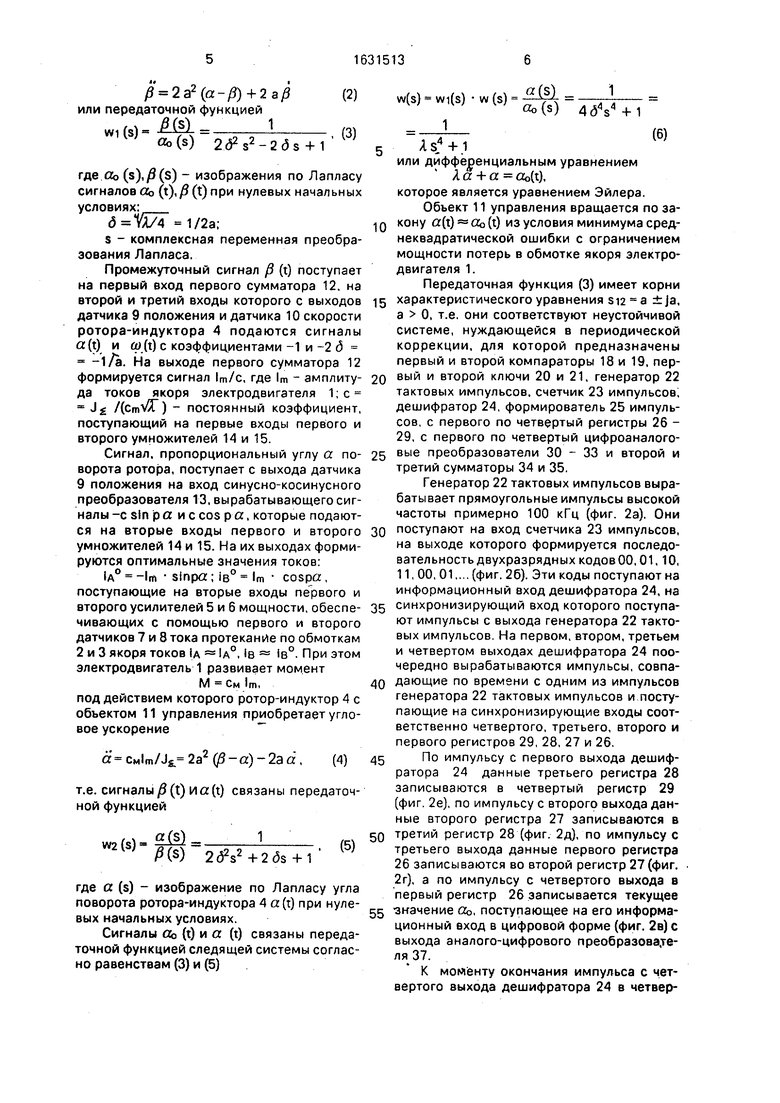
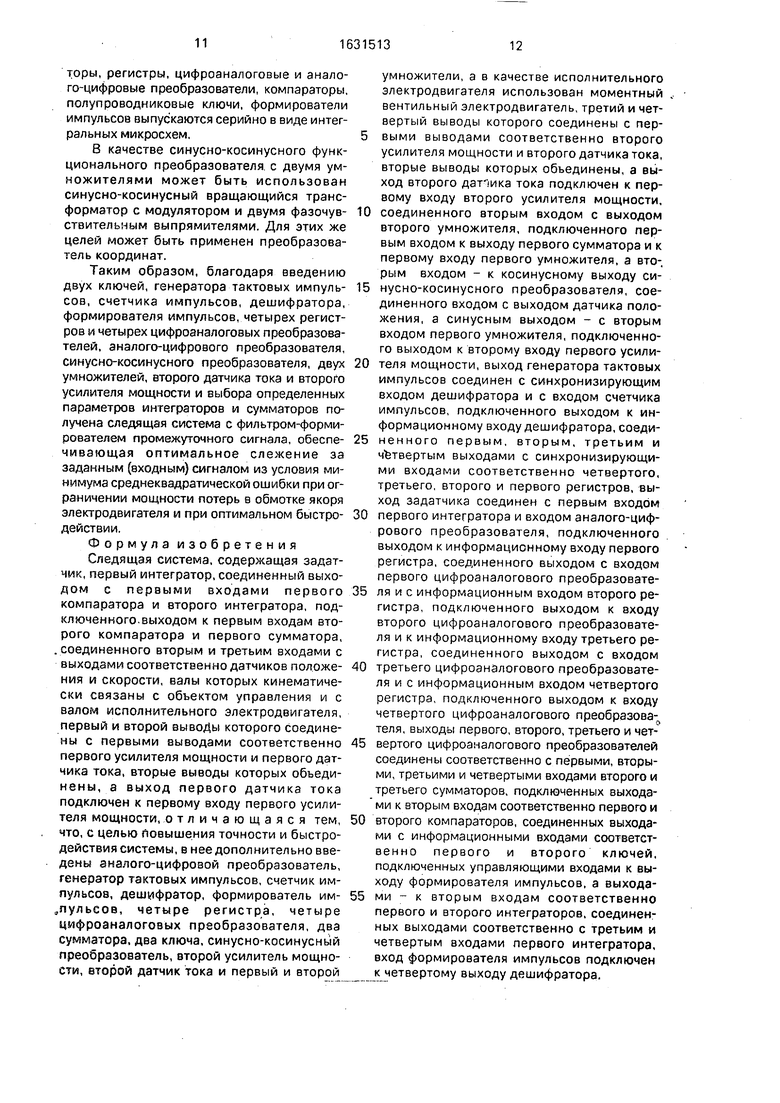
Генератор 22 тактовых импульсов вырабатывает прямоугольные импульсы высокой частоты примерно 100 кГц (фиг. 2а). Они
0 поступают на вход счетчика 23 импульсов, на выходе которого формируется последовательность двухразрядных кодов 00,01, 10, 11, 00, 01.. . (фиг. 26). Эти коды поступают на информационный вход дешифратора 24, на
5 синхронизирующий вход которого поступают импульсы с выхода генератора 22 тактовых импульсов. На первом, втором, третьем и четвертом выходах дешифратора 24 поочередно вырабатываются импульсы, совпа0 дающие по времени с одним из импульсов генератора 22 тактовых импульсов и поступающие на синхронизирующие входы соответственно четвертого, третьего, второго и первого регистров 29, 28, 27 и 26.
5По импульсу с первого выхода дешифратора 24 данные третьего регистра 28 записываются в четвертый регистр 29 (фиг. 2е), по импульсу с второго выхода данные второго регистра 27 записываются в
0 третий регистр 28 (фиг. 2д), по импульсу с третьего выхода данные первого регистра 26 записываются во второй регистр 27 (фиг. 2г), а по импульсу с четвертого выхода в первый регистр 26 записывается текущее
5 значение Оо, поступающее на его информационный вход в цифровой форме (фиг. 2в) с выхода аналого-цифрового преобразователя 37.
К моменту окончания импульса с четвертого выхода дешифратора 24 в четвертом, третьем, втором и первом регистрах 29, 28, 27 и 26 записываются в цифровой форме соответственно значения, оь (tk) , czb (tk-i)
00(tk-2), оь (tk-з), где tk k r; tk-i tk - i r;
1- 0.....3; r - 4rn ; ти - период импульсов генератора 22 тактовых импульсов. Эти значения поступают на входы первого, второго, третьего и четвертого цифроаналоговых преобразователей 30 - 33, переводящие их
в аналоговую форму. Сумматоры 34 и 35 зырабат ы вают сигналы ft (tk), ft (tk) согласно формулам:
Р (tk) РоОо (tk) + Pi «о (tk-1) + Р2 Оо (tk-2) +
+ Рз ob(tk-3);
Р (tk) Qo Оо (tk) + q 1 Оо (tk-0 + Q2 «о (tk-2) +
+ РЗ Оо (tk-3),
где постоянные коэффициенты Р0, Pi, P2. Рз, Qo, qi, 42, qs определены из условия конеч- но-разностной аппроксимации дифференциального уравнения
Д-2а/3 + 2а21у8 2а2оь
при Оо (t) n/(t) в виде полиномов третьей степени.,
Обратный фронт импульса с четвертого выхода дешифратора 24 воздействует на формирователь 25 импульсов, вырабатывающий короткий импульс (фиг. 2ж), Он посту- пает на управляющие входы первого и второго ключей 20 и 21 и открывает их. Пер- эый компаратор 18 сравнивает сигналы д (tk) и Д поступающие с выходов второго сумматора 34 и первого интегратора 16, и вырабатывает сигнал ± Uo, где U0 const, поступающий через первый ключ 20 на второй вход первого интегратора 16. При этом, происходит быстрое изменение сигнала /J до значения Р (tk). Второй компаратор 19 сравнивает сигналы ft (tk) и (3 . поступающие с выходов третьего сумматора 35 и второго интегратора 17, и вырабатывает сигнал ± Uo, поступающий через второй ключ 21 на второй вход второго интегратора 17. При этом происходит быстрое изменение сигнала /3 до значения/(tk). Коррекция сигналов/) (t) и/ (t) происходите периодом т.
На фиг. 2в - е буквами а, Ь, с, d помечены моменты записи в первый, второй, тре- тий и четвертый регистры 26, 27. 28 и 29 одних значений %.
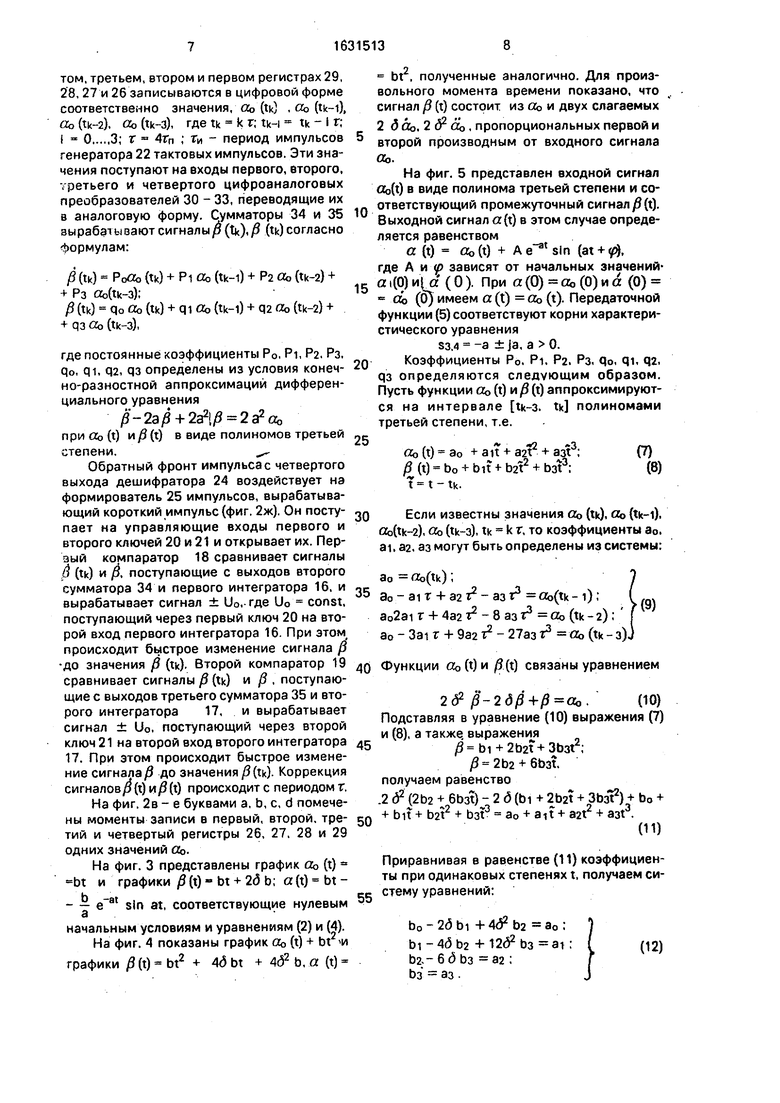
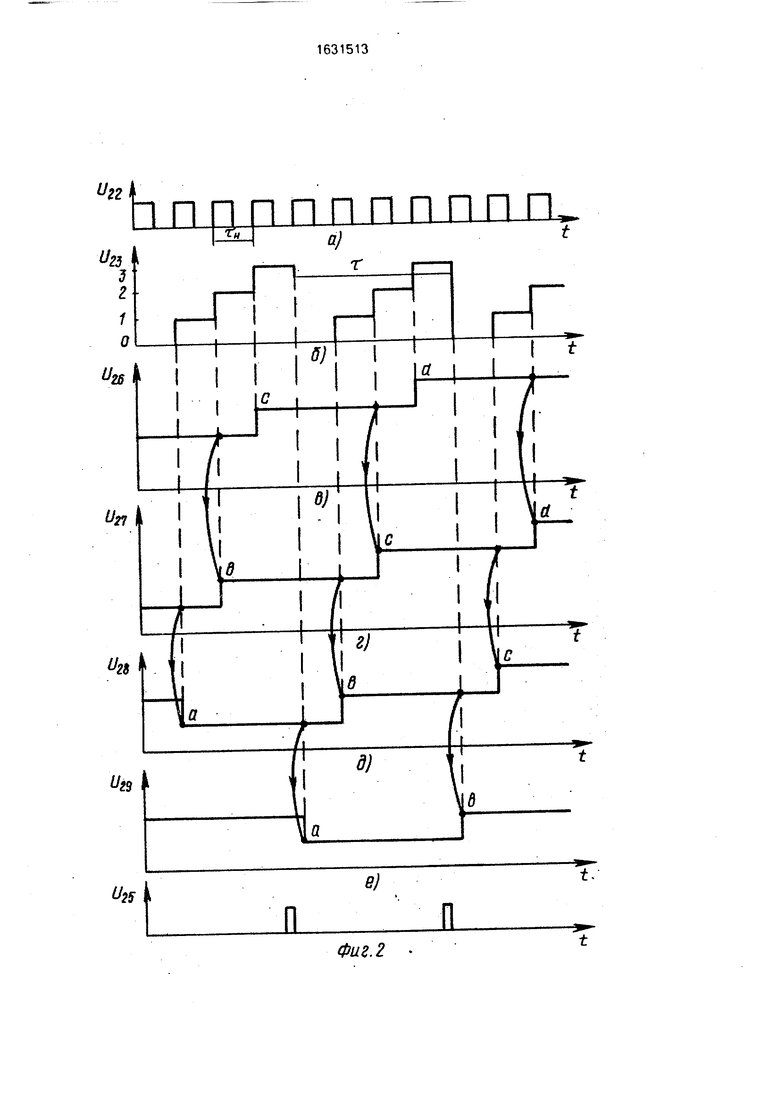
На фиг. 3 представлены график оь (t) e bt и графики Р (t) - bt + b; a (t) bt sin at, соответствующие нулевым
3
начальным условиям и уравнениям (2) и (4). На фиг. 4 показаны график OQ (t) + bt и
графики Р (t) bt2 + Ад bt + 4(52 b, a (t) bt . полученные аналогично. Для произвольного момента времени показано, что сигнал Р (t) состоит из «о и двух слагаемых
2 б OQ, 2 л Оо , пропорциональных первой и второй производным от входного сигнала оь.
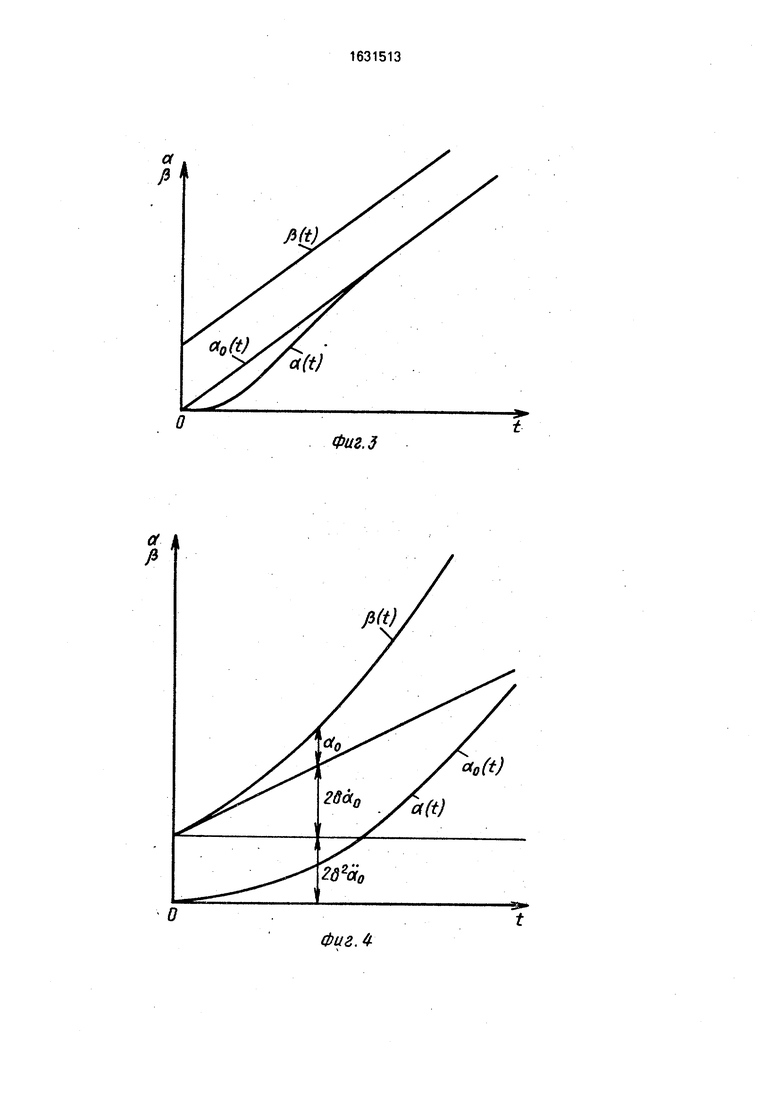
На фиг. 5 представлен входной сигнал Oo(t) в виде полинома третьей степени и соответствующий промежуточный сигнал j8(t). Выходной сигнал a (t) в этом случае определяется равенством
a (t) оь (t) + А sin (at + $, где А и р зависят от начальных значений- a i(0) н(а ( 0). При а (0) оь (0) и а (0) do (0) имеем а (t) аь (t). Передаточной функции (5) соответствуют корни характеристического уравнения
S3.4 -а ± ja, а 0.
Коэффициенты Р0. Pi, Р. Рз, Чо, qi, qz, рз определяются следующим образом. Пусть функции OQ (t) и/3 (t) аппроксимируются на интервале tk-з. tk полиномами третьей степени, т.е.
«b (t) а0 + an + a2t2 + /(t) b0-i-bit + b2f2 + b3t3; .
(7) (8)
Если известны значения «о (tk), Oo (tk-i), cfo(tk-2), «о (tk-з), tk - k r, то коэффициенты а0. ai, 32, аз могут быть определены из системы:
а0 Oo(tk);
а0-а1Т + а2Т2-азт3 ob(tk-i); , .„ a02ai т + 4а2 т2 - 8 аз т3 Оо (tk -2): а0 - 3ai г + 9а2 т2 - 27аз т3 оь (tk - з)ч
Функции Oo(t)n /(t) связаны уравнением
2Й2 р-2др+р 0о.(10)
Подставляя в уравнение (10) выражения (7) и (8), а также, выражения
+ 2b2t + 3b3t2;
+ 6b3t. получаем равенство
.2 б2 (2b2 + 6b3t) - 2 б (Ы + 2b2t + ЗЬз) + Ь0 + + bit + b2t2 + a0 + a it + a2t2 + ast3.
(11)
Приравнивая в равенстве (11) коэффициенты при одинаковых степенях t, получаем систему уравнений:
b2 a0 : bi at:
Ь2- 6 6 Ьз 82 I
Ьз аз.
Решая совместно системы уравнений (9) (12), получаем формулы для коэффициенто
boЬз. через значения Оо (tk)«о (tk-з):
. Зт2 + 11(5т + 12б2 , ,
(tk) ЗГ
бдт+Юд2 , v , + 12Oo(tk-l) +j-х
xOo(tk-2)-2dT4;6(32go (tk-з). OS Зт2
. 11 т2 Ч-24 + 126 . ,
bi OQ (tk) 6Z3
Зт2 -МОбт + бб2 т3
Oo (tk-1) +
. 3T2-f-166r + 1262 , . +Oo(tk-2)2т3
T2 + 66T + 662
Зт3
Ob(tk-3): (14)
(tk)- l±66ao() +
Г2т3
+ 2r±3dao()r + 2 ao{tk 3). (15)
Г2Г
Ьз - ob (tk)/6 т3 - cto (tk-i)/2 т3 +
Ob (tk-2)/2 I3 - Oo (tk-3)/6 T3 . (16)
Учитывая, 4TO/3(tk) bo, /3 (tk) bi, получаем из выражений (14) и (13) равенства:
Ро (11т2+24(5т + 12(52)/6т3 Pi -(3z2 + 106r + 6(52Vi3;
Р2(3т2 + 16(5г +12а2)/2т3; Рзгг- + ббг + бб /Зт3;
:
Ч-ббг + ббУЗт3 qo (3 т2 + 11 бг + 12 б2)/3 т2 ; Q1 -(6с5т + 10(52)/т2; q2(36T + 8(52)/z2; (2бг + бд2)/3т2.
Формулы (17) и (18) позволяют по известным значениямт ибопределить величины P0,Pi, Р2, Рз, qo, qi, Q2, Q3, являющиеся входными коэффициентами второго и третьего сумматоров 34 и 35.
Следящая система (фиг. 6) с электродвигателем 41 постоянного тока, используемым в качестве исполнительного электродвигателя, содержит помимо первого и второго интеграторов 16 и 17, первого и второго компараторов 18 и 19, первого и второго ключей 20 и 21, генератора 22 тактовых импульсов, счетчика 23 импульсов, дешифратора 24, формирователя 25 импульсов, первого - четвертого регистров 26 - 29, первого - четвертого цифроаналоговых преобразователей 30 - 33, второго и третьего сумматоров 34 и- 35, образующих фильтр 44, формирующий промежуточный сигнал fi (t), предварительный усилитель 38, усилитель 39 мощности, датчик 40 тока, электродвигатель 41 постоянного тока с якорем 42 и индуктором 43 на статоре.
Якорь 42 механически связан с объектом 11 управления и с датчиками положения 9 и скорости 10, выходы которых подключены к второму и третьему входам первого
сумматора 12. Его выход подключен к входу предварительного усилителя 38, выход которого подключен к второму входу усилителя 39 мощности. Его выход подключен к обмотке якоря 42 через входы датчика 40
тока, выход которого подключен к первому (инвертирующему) входу усилителя 39 мощности.
При таком варианте выполнения следящая система работает следующим образом.
По аналоговому входному воздействию OQ, поступающему с выхода задатчика 36, и по цифровому воздействию OQ с выхода аналого-цифрового преобразователя 37 фильтр 44 вырабатывает промежуточный сигнал
уЗ (t), поступающий на первый вход первого сумматора 12. На его второй и третий входы поступают сигналы a (t), w(t) с выходов датчиков положения 9 и скорости 10. На выходе первого сумматора 12 формируется сигнал
я°/с, где я° - требуемое значение тока якоря 42 электродвигателя 41 постоянного тока; с jЈ / ( CM vT - постоянный коэф-1 фициент; см - постоянная момента;свя- зывающая электромагнитный момент М с
током якоря 42:
М CM 1я.
Предварительный усилитель 38 имеет коэффициент усиления с и вырабатывает сигнал iq°(t), поступающий на входусилителя 39 мощности. Он питает обмотку якоря 42
током 1Я 1я благодаря глубокой отрицательной обратной связи по току, обеспечиваемой датчиком 40 тока. Объект 11 управле - ния вращается по закону a(i)Oo (t) из условия минимума среднеквадратичной ошибки с ограничением мощности потерь в обмотке якоря 42.
Если задатчик 36 выполнен в цифровом
виде, то его выход подключается к информационному входу первого регистра 26 прямо,
а к первому входу первого интегратора 16 через цифроаналоговый преобразователь.
Сумматоры, интеграторы, генераторы импульсов, счетчики импульсов, дешифраторы, регистры, цифроаналоговые и аналого-цифровые преобразователи, компараторы, полупроводниковые ключи, формирователи импульсов выпускаются серийно в виде интегральных микросхем,
8 качестве синусно-косинусного функционального преобразователя с двумя умножителями может быть использован синусно-косинусный вращающийся трансформатор с модулятором и двумя фазочув- ствительным выпрямителями. Для этих же целей может быть применен преобразователь координат.
Таким образом, благодаря введению двух ключей, генератора тактовых импульсов, счетчика импульсов, дешифратора, формирователя импульсов, четырех регистров и четырех цифроаналоговых преобразователей, аналого-цифрового преобразователя, синусно-косинусного преобразователя, двух умножителей, второго датчика тока и второго усилителя мощности и выбора определенных параметров интеграторов и сумматоров получена следящая система с фильтром-формирователем промежуточного сигнала, обеспечивающая оптимальное слежение за заданным (входным) сигналом из условия минимума среднеквадратической ошибки при ограничении мощности потерь в обмотке якоря электродвигателя и при оптимальном быстродействии.
Формула изобретения
Следящая система, содержащая задат- чик, первый интегратор, соединенный выходом с первыми входами первого компаратора и второго интегратора, подключенного выходом к первым входам второго компаратора и первого сумматора, .соединенного вторым и третьим входами с выходами соответственно датчиков положения и скорости, валы которых кинематически связаны с объектом управления и с валом исполнительного электродвигателя, первый и второй выводы которого соединены с первыми выводами соответственно первого усилителя мощности и первого датчика тока, вторые выводы которых объединены, а выход первого датчика тока подключен к первому входу первого усилителя мощности, отличающаяся тем, что, с целью повышения точности и быстродействия системы, в нее дополнительно введены аналого-цифровой преобразователь, генератор тактовых импульсов, счетчик импульсов, дешифратор, формирователь импульсов, четыре регистра, четыре цифроаналоговых преобразователя, два сумматора, два ключа, синусно-косинусный преобразователь, второй усилитель мощности, второй датчик тока и первый и второй
умножители, а в качестве исполнительного электродвигателя использован моментный . вентильный электродвигатель, третий и четвертый выводы которого соединены с первыми выводами соответственно второго усилителя мощности и второго датчика тока, вторые выводы которых объединены, а выход второго датчика тока подключен к первому входу второго усилителя мощности,
0 соединенного вторым входом с выходом второго умножителя, подключенного первым входом к выходу первого сумматора и к первому входу первого умножителя, а вторым входом - к косинусному выходу си5 нусно-косинусного преобразователя, соединенного входом с выходом датчика положения, а синусным выходом - с вторым входом первого умножителя, подключенного выходом к второму входу первого усили0 теля мощности, выход генератора тактовых импульсов соединен с синхронизирующим входом дешифратора и с входом счетчика импульсов, подключенного выходом к информационному входу дешифратора, соеди5 немного первым, вторым, третьим и чЪтвертым выходами с синхронизирующими входами соответственно четвертого, третьего, второго и первого регистров, выход задатчика соединен с первым входом
0 первого интегратора и входом аналого-цифрового преобразователя, подключенного выходом к информационному входу первого регистра, соединенного выходом с входом первого цифроаналогового преобразовате5 ля и с информационным входом второго регистра, подключенного выходом к входу второго цифроаналогового преобразователя и к информационному входу третьего регистра, соединенного выходом с входом
0 третьего цифроэналогового преобразователя и с информационным входом четвертого регистра, подключенного выходом к входу четвертого цифроаналогового преобразова- теля, выходы первого, второго, третьего и чет5 вертого цифроаналогового преобразователей соединены соответственно с первыми, вторыми, третьими и четвертыми входами второго и третьего сумматоров, подключенных выхода- ми к вторым входам соответственно первого и
0 второго компараторов, соединенных выходами с информационными входами соответственно первого и второго ключей, подключенных управляющими входами к выходу формирователя импульсов, а выхода5 ми - к вторым входам соответственно первого и второго интеграторов, соединенных выходами соответственно с третьим и четвертым входами первого интегратора, вход формирователя импульсов подключен к четвертому выходу дешифратора.
Un
h
ппрппппппп
Фиг. 2
Of
J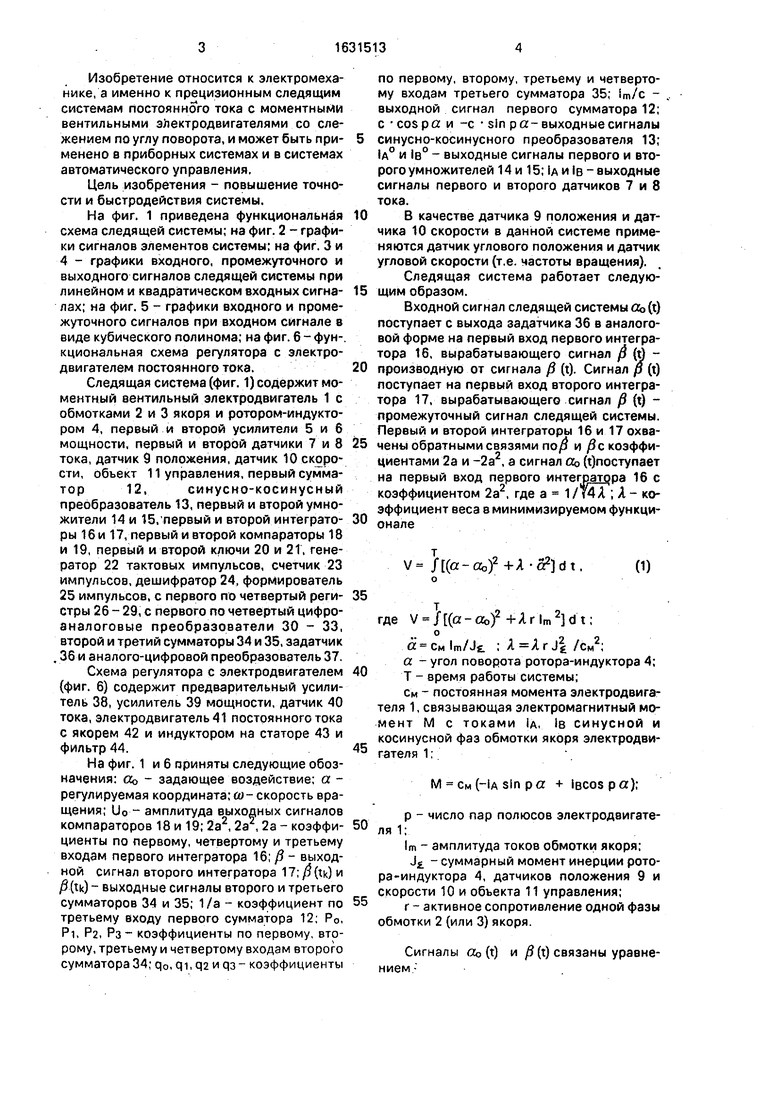
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для настройки моментного вентильного электродвигателя | 1989 |
|
SU1774454A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1580495A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1515273A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1642558A1 |
| Анализатор спектра | 1985 |
|
SU1287033A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1991 |
|
RU2018899C1 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
Изобретение относится к электромеханике, а именно к прецизионным системам управления постоянного тока с моментны- ми вентильными электродвигателями со слежением по углу поворота, и может быть применено в приборных системах. Цель изобретения - повышение быстродействия и точности. Поставленная цель достигается Ј за счет того, что в системе реализовано оптимальное управление, полученное из условия минимума среднеквадратической ошибки при ограничении мощности потерь в обмотке якоря электродвигателя. Следящая система содержит моментный вентильный электродвигатель 1 с обмотками 2 и 3 якоря и с ротором-индуктором 4, усилители 5 и 6 мощности, датчики 7 и 8 тока, датчик 9 положения (угла поворота ротора), датчик 10 скорости (частоты вращения ротора), объект 11 управления, сумматор 12, синусно-коси- нусный преобразователь 13, умножители 14 и 15, интеграторы 16 и 17, компараторы 18 и 19, ключи 20 и 21, генератор 22 тактовых импульсов, счетчик 23 импульсов, дешифратор 24, формирователь 25 импульсов, регистры 26 - 29, цифроаналоговые преобразователи 30-33, сумматоры 34 и 35, задатчик 36, аналого-цифровой преобразователь 37. Положительный эффект в системе достигается как за счет схемного решения (ввода новых блоков и связей), так и за счет выбора параметров ее блоков. 6 ил. w fe О со СП со 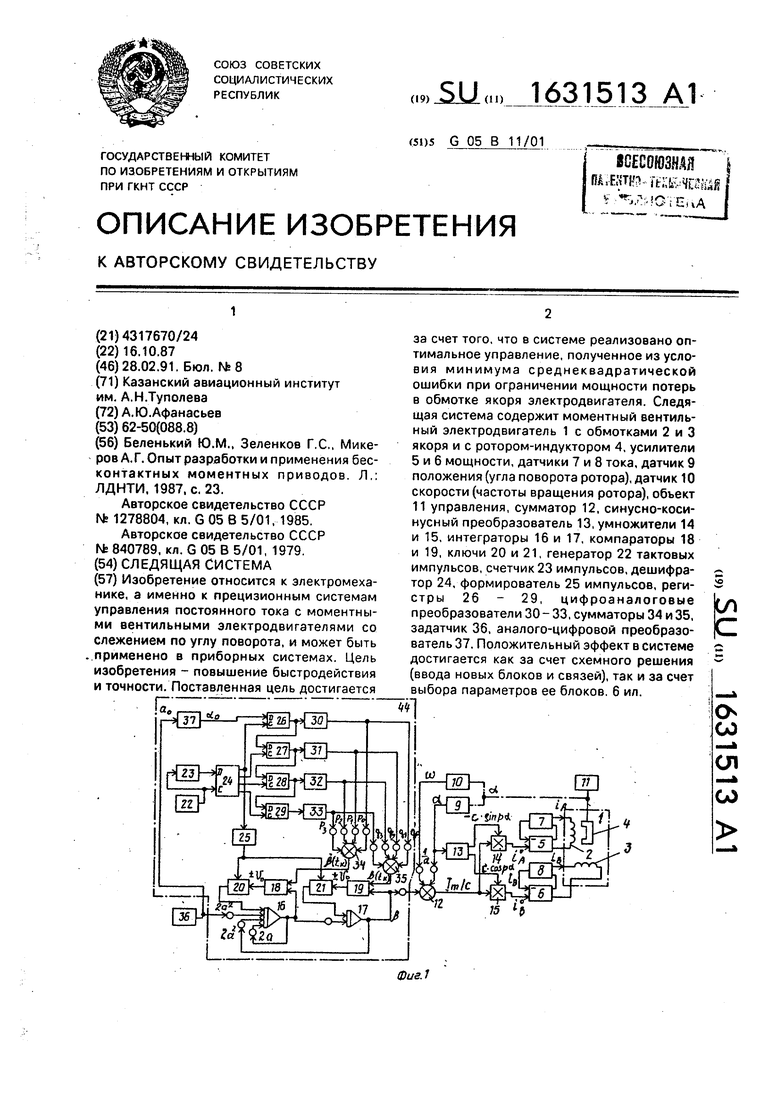
0
Фиг.з
ФигЛ
о;
Фиа.Я
Ю
з ;
л -
44
| o--M-- jЈ
Редактор М.Петрова
12
Фиг,6
Составитель Г.Нефедова
Техред М.МоргенталКорректор М.Самборская
П Ф
.Ц
| Беленький Ю.М., Зеленков Г.С., Мике- ров А.Г | |||
| Опыт разработки и применения бесконтактных моментных приводов | |||
| Л.: ЛДНТИ, 1987, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Комбинированная система управления | 1985 |
|
SU1278804A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Фильтр для систем автоматическогоРЕгулиРОВАНия | 1979 |
|
SU840789A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
