Изобретение относится к радиолокации и может быть использовано в радионавигации, метеорологии, геодезии.
Известен подвижный пеленгатор [2], позволяющий определить местоположение цели по угломерным данным на основе априорных сведений о характере движения, содержащий синхронизатор, устройство формирования пеленгов, блок вычисления коэффициентов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, блок медианных фильтров, блок определения местоположения, блок инерционной системы навигации, устройство отображения.
Недостатком этого устройства являются ограниченные функциональные возможности, так как устройство [2] не позволит определить местоположение цели по угломерным данным для криволинейной модели движения.
Наиболее близким к предложенному устройству является подвижный пеленгатор [1], позволяющий определить местоположение цели по угломерным данным на основе априорных сведений о характере движения для криволинейной модели движения, содержащей устройство формирования пеленгов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, устройство отображения, блок инерциальной системы навигации, синхронизатор, вычислитель-формирователь, блок оценивания, блок внесения декартовых координат цели.
Недостатками прототипа являются относительно низкая точность определения координат из-за накопления ошибок инерциальной навигационной системы и необходимость высокодинамичного носителя пеленгатора.
Заявляемое устройство позволяет определить параметры криволинейных траекторий по текущим угломерным данным неподвижного пеленгатора и априорным данным о начальной дальности до объекта, что является достигнутым техническим результатом.
Задача определения параметров криволинейной траектории движения объектов неподвижным пеленгатором решается путем исключения из устройства, содержащего устройство формирования пеленгов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, устройство отображения, блок инерционной системы навигации, синхронизатор, вычислитель-формирователь, блок оценивания рассчитываемых коэффициентов, блок вычисления декартовых координат цели, следующих блоков: блока инерциальной системы навигации, вычислителя-формирователя, блока вычисления декартовых координат цели, и введения в него блока преобразователей, блока формирования базисных функций, блока оценивания параметров движения, а также организацией взаимодействия между ними.
Предлагается пассивная пеленгационная система, содержащая устройство формирования пеленгов, блок преобразователей, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, блок оценивания рассчитываемых коэффициентов, блок оценивания параметров движения, устройства отображения, синхронизатора, блок формирования базисных функций, при этом первый выход устройства формирователя пеленгов соединен с третьим входом буферного запоминающего устройства для записи соответствующих кодов моментов времени пеленга α(tk) и β(tk) и с первым входом блока преобразователей, выход которого соединен с первым входом буферного запоминающего устройства для записи кодов cosα(tk), cosβ(tk), sinα(tk), sinβ(tk) и tgβ(tk), первый выход буферного запоминающего устройства для выдачи кодов cosα(tk), cosβ(tk), sinα(tk), sinβ(tk) и tgβ(tk) соединен с первым входом блока решения систем линейных алгебраических уравнений, первый выход которого через блок оценивания рассчитываемых коэффициентов соединен с первым входом блока оценивания параметров движения, выход которого через устройство отображения соединен с выходом устройства пассивной пеленгационной системы, второй выход буферного запоминающего устройства для выдачи соответствующих кодов моментов времени пеленга α(tk) и β(tk) соединен с первым входом блока формирования базисных функций и со вторым входом блока оценивания параметров движения, первый выход блока формирования базисных функций соединен с третьим входом блока решения систем линейных алгебраических уравнений, второй выход блока формирования базисных функций соединен с третьим входом блока оценивания параметров движения, второй выход устройства формирования пеленгов соединен со входом синхронизатора, первый выход которого соединен со вторым входом для сигналов управления буферного запоминающего устройства, второй выход - со вторым входом блока решения систем линейных алгебраических уравнений, третий выход - со вторым входом блока преобразования базисных функций, где α(tk) - значение угла азимута в зависимости от момента времени tk, а β(tk) - значение угла места в зависимости от момента времени tk.
Как следует из описания совокупности признаков заявляемого изобретения новизна решения задачи состоит в исключении вычислителя-формирователя, блока инерциальной навигационной системы, блока вычисления декартовых координат цели, блока оценивания и введении блока преобразователей кодов, блока формирования базисных функций, блока оценки параметров движения, блока оценивания рассчитываемых коэффициентов, а также организации связей между ними, что позволит повысить точность измерения и исключить высокодинамический носитель пеленгатора.
На фиг.1 представлена структурная схема пассивной пеленгационной системы. Она содержит устройство формирования пеленгов 1, блока преобразователей 2, буферное запоминающее устройство 3, синхронизатор 4, блок решения системы линейных алгебраических уравнений 5, блок формирователей базисных функций 6, блок оценивания рассчитываемых коэффициентов 7, блок оценки параметров движения 8, устройство отображения 9.
На фиг.2 представлена функциональная схема блока преобразователей. Он содержит первый 10, второй 11, третий 12, четвертый 13, пятый 14 преобразователи кодов.
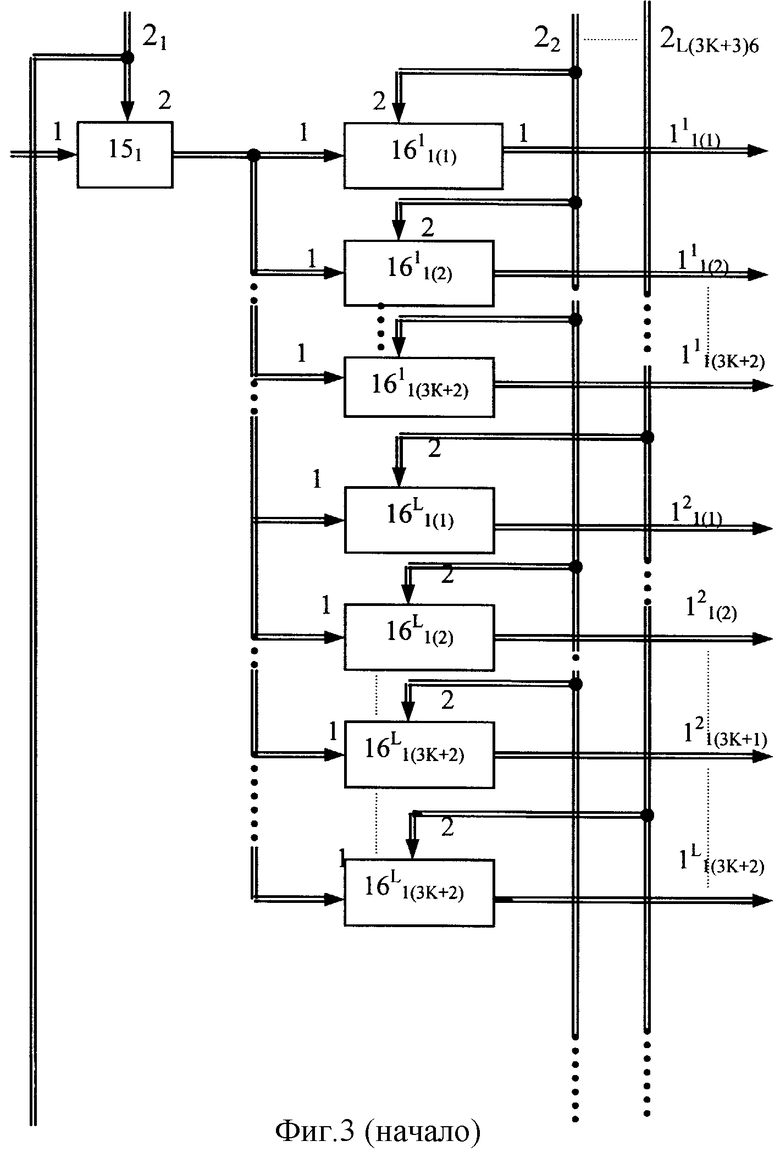
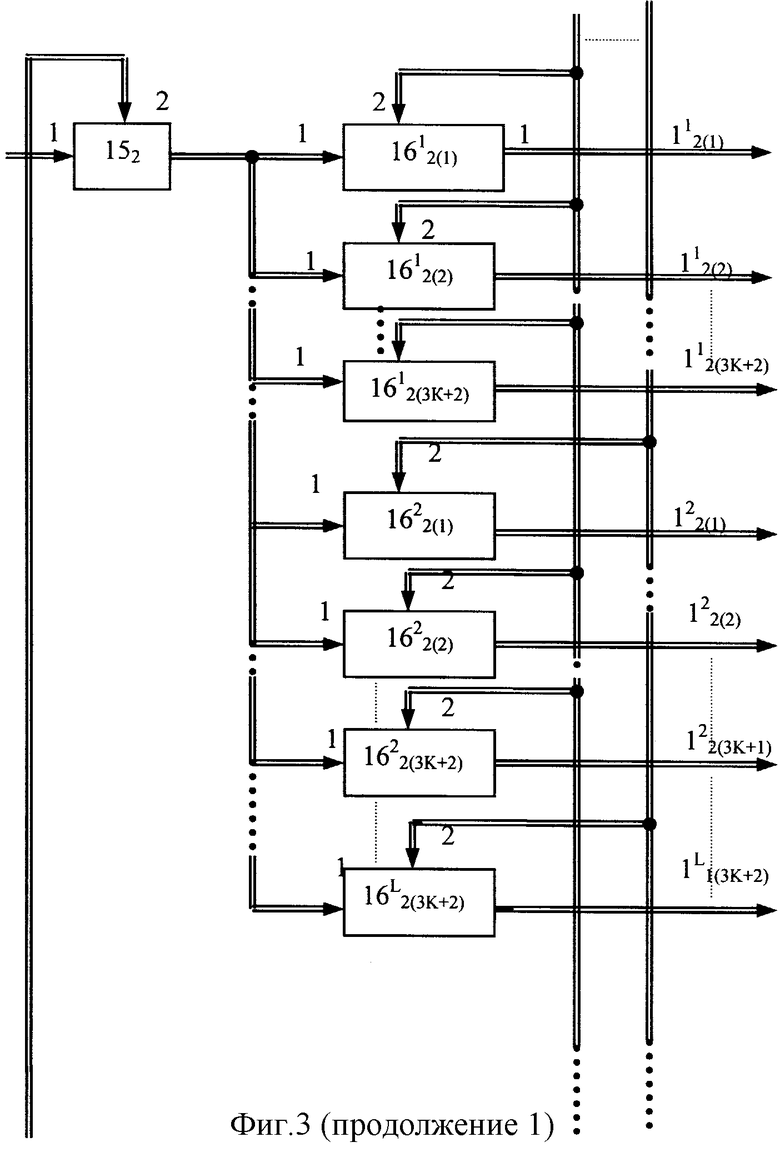
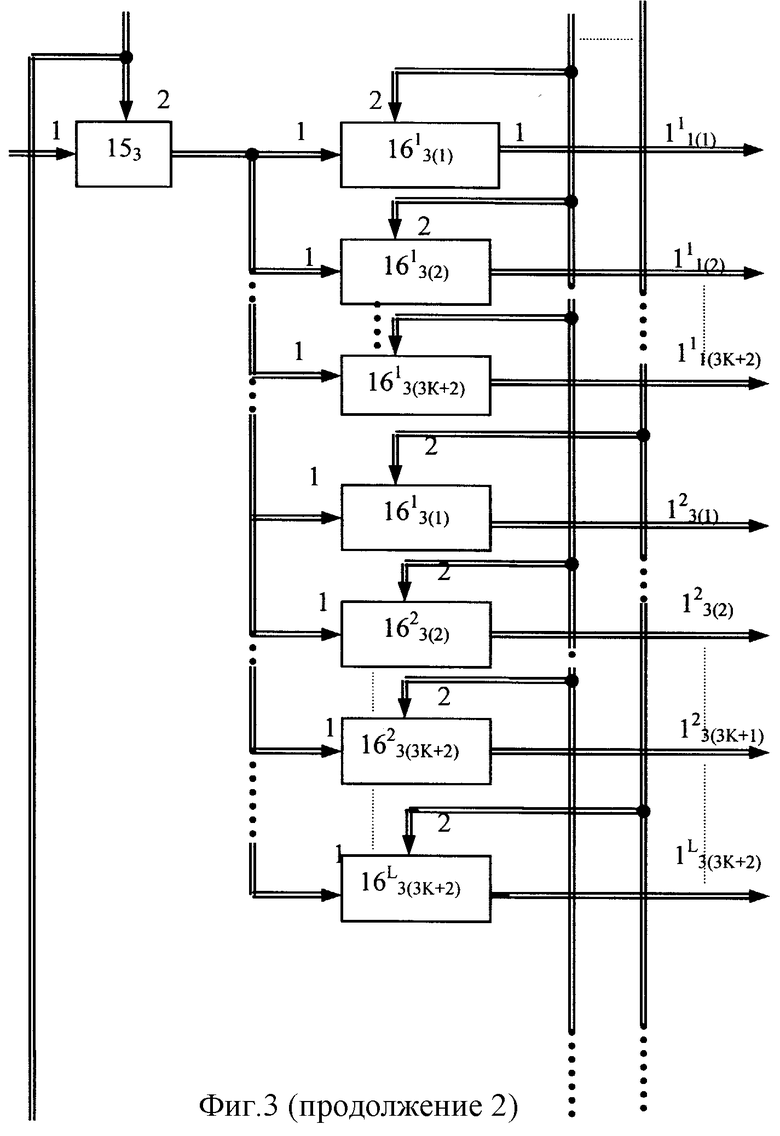
На фиг.3 представлена функциональная схема буферного запоминающего устройства. Оно содержит первое 151, второе 152... шестое 156 сверхоперативное запоминающее устройство, первый 161 1(1)...6L (3K+2)-й 6L 6(3K+2)-регистр.
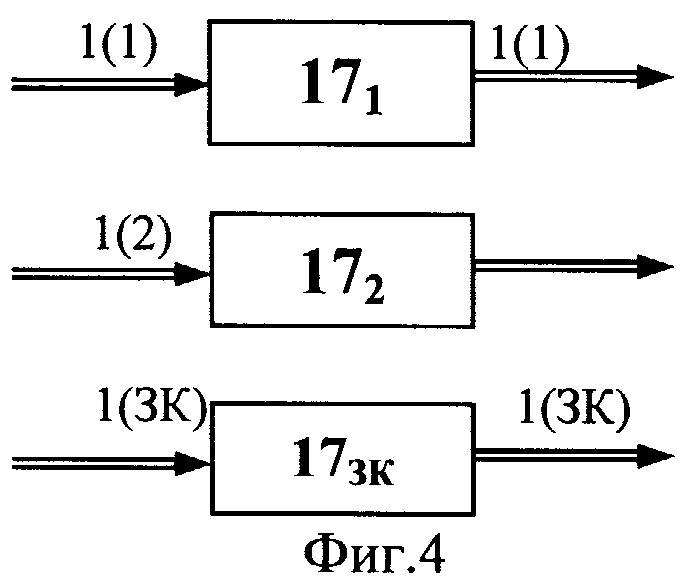
На фиг.4 представлена функциональная схема блока оценивания. Он содержит первый 171...173K-й медианный фильтр.
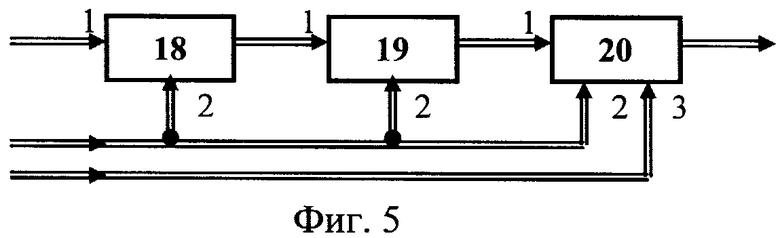
На фиг.5 представлена структурная схема блока оценивания параметров движения. Он содержит вычислитель γA(tK), α'(tK), β'(tk) 18, вычислитель ψAJ(tK) 19, вычислитель x, y, z 20.
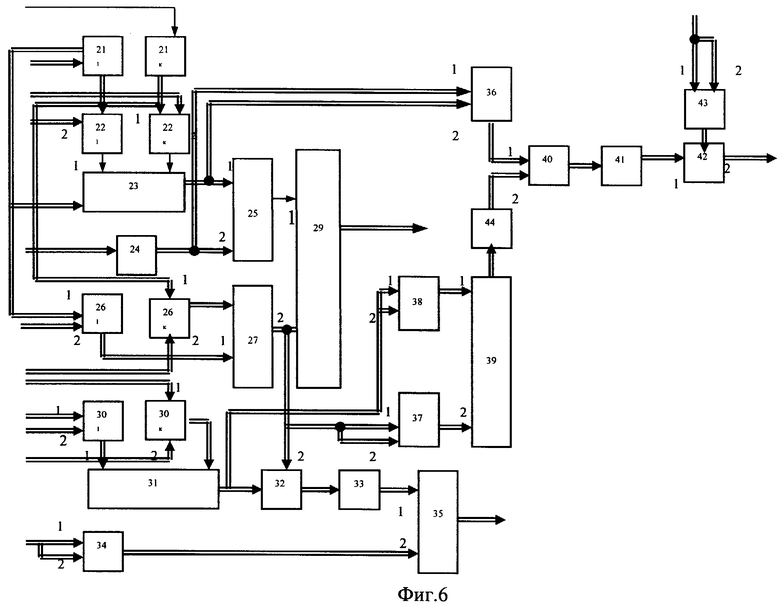
На фиг.6 представлена функциональная схема вычислителя γA(tK), α'(tK), β'(tK). Он содержит первый 24, второй 33, третий 41, четвертый 211...21K-й дифференциаторы, первый 34, второй 35, третий 42, четвертый 43, пятый 38, шестой 37, 211...22K-й, 261...26K-й, 301...30K-й перемножители. Первый 23, второй 27, третий 31, четвертый 25, пятый 36, шестой 39 сумматоры, первый 29, второй 32, третий 40 делители, первый 44 вычислитель квадратного корня.
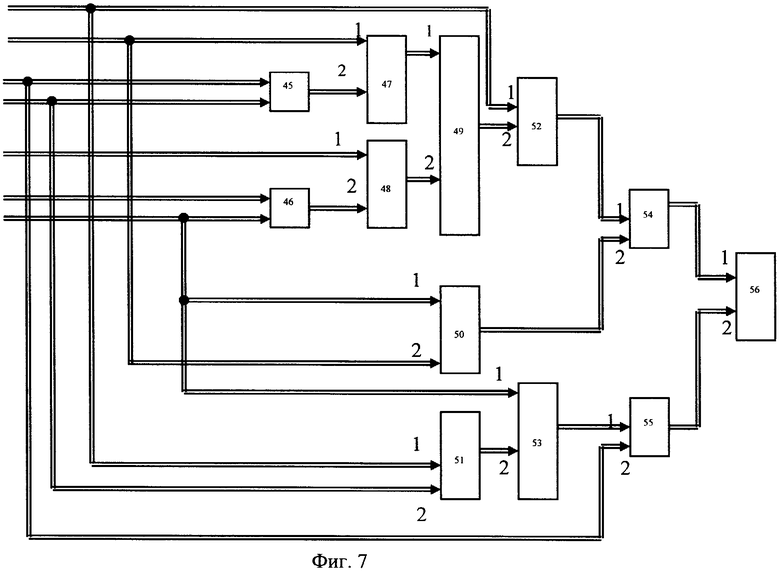
На фиг.7 представлена функциональная схема вычислителя ψAJ(tK). Он содержит первый 45, второй 46, третий 47, четвертый 48, пятый 49, шестой 50, седьмой 51, восьмой 53, девятый 52 умножители, первый 49, второй 54 сумматоры, первый 55 вычитатель, первый 56 делитель.
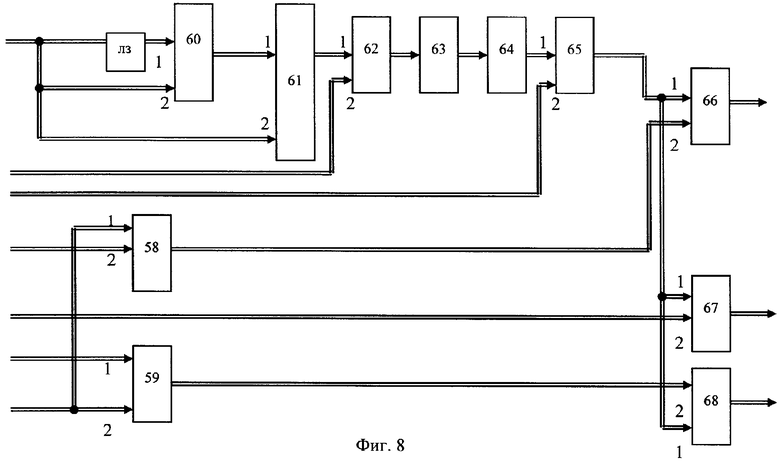
На фиг.8 представлена функциональная схема вычислителя x(t), y(t), z(t). Он содержит линейные задержки 57, первый 61, второй 58, третий 59, четвертый 62, пятый 65, шестой 66, седьмой 67, восьмой 68 умножители, вычислитель 60, сумматор 63, экспоненциатор 64.
На фиг.9 представлена функциональная схема блока формирования базисных функций. Он состоит из 68 первого 691...6L (3K+2)-го преобразователя базисных функций.
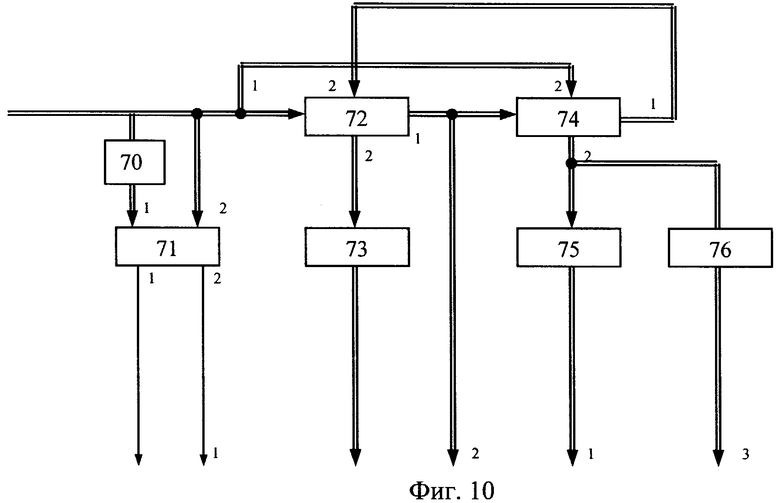
На фиг.10 представлена функциональная схема синхронизатора. Он содержит линию задержки 70, триггер 71, первый счетчик 72, второй счетчик 74, первый 73, второй 75, третий 76 дешифраторы.
На фиг.1 первый выход устройства формирователя пеленгов соединен с третьим входом буферного запоминающего устройства для записи соответствующих кодов моментов времени пеленга α(tk) и β(tk) и с первым входом блока преобразователей, выход которого соединен с первым входом буферного запоминающего устройства для записи кодов cosα(tk), cosβ(tk), sinα(tk), sinβ(tk) и tgβ(tk), первый выход буферного запоминающего устройства для выдачи кодов cosα(tk), cosβ(tk), sinα(tk), sinβ(tk) и tgβ(tk) соединен с первым входом блока решения систем линейных алгебраических уравнений, первый выход которого через блок оценивания рассчитываемых коэффициентов соединен с первым входом блока оценивания параметров движения, выход которого через устройство отображения соединен с выходом устройства пассивной пеленгационной системы, второй выход буферного запоминающего устройства для выдачи соответствующих кодов моментов времени пеленга α(tk) и β(tk) соединен с первым входом блока формирования базисных функций и со вторым входом блока оценивания параметров движения, первый выход блока формирования базисных функций соединен с третьим входом блока решения систем линейных алгебраических уравнений, второй выход блока формирования базисных функций соединен с третьим входом блока оценивания параметров движения, второй выход устройства формирования пеленгов соединен со входом синхронизатора, первый выход которого соединен со вторым входом для сигналов управления буферного запоминающего устройства, второй выход со вторым входом блока решения систем линейных алгебраических уравнений, третий выход - со вторым входом блока преобразования базисных функций, где α(tk) - значение угла азимута в зависимости от момента времени tk, а β(tk) - значение угла места в зависимости от момента времени tk.
На фиг.2 шина первого выхода устройства формирования пеленгов соединена со входом первого 10, второго 11, третьего 12, четвертого 13, пятого 14 преобразователя кодов, первый выход первого 10, второго 11, третьего 12, четвертого 13, пятого 14 преобразователей кодов соединен с выходом блока, который соединен с первым входом буферного запоминающего устройства для записи кодов cosα(tk), cosβ(tk), sinα(tk), sinβ(tk) и tgβ(tk).
На фиг.3 выходная шина блока преобразователей соединение первым входом первого 151, второго 152, третьего 153, четвертого 154, пятого 155 сверхоперативного запоминающего устройства, выходная шина первого 151... пятого 155 сверхоперативного запоминающего устройства соединена соответственно с первыми входами 161 1(1)...L(3K+2)-го 16L 5(3K+2) регистров. Шины первого выхода устройства формирования пеленгов соединены с первым входом шестого 156 сверхоперативного запоминающего устройства, выход которого соединен соответственно с первым входом 161 1(1)...L(3K+2)-го 16L 6(3K+2) регистров. Вторые входы первого 151...156 сверхоперативного запоминающего устройства соединены с первым выходом синхронизатора. Вторые входы 161 1(1)...L(3K+2)-го 16L 6(3K+2) регистров соединены с первым выходом синхронизатора.
Выходы регистров 161 1(1)...16L 5(3K+2) соединены с первым входом блока решения систем линейных алгебраических уравнений. Выходы регистров 161 1(1)...16L 6(3K+2) соединены с первым входом блока формирования базисных функций. Выходы регистров 161 1(1)...16L 6(3K+2) соединены со вторым входом блока оценивания параметров движения.
На фиг.4 входы блока 1(1)...1(3K) соединены соответственно с выходами 1(1)...1(3K) блока 7.
На фиг.5 выходная шина блока оценивания рассчитываемых коэффициентов соединена с первым входом блока оценивания параметров движения, которая соединена с первым входом вычислителя γA(tK), α'(tK), β'(tK) 18, выход которого соединен с первым входом вычислителя ψAJ(tK) 19, выход которого соединен с первым входом вычислителя x, y, z 20, выход которого через устройство отображения соединен с выходом устройства.
Вторые входы вычислителя γA(tK), α'(tK), β'(tK) 18, вычислителя ψAJ(tK) 19, вычислителя x(t), y(t), z(t) 20 соединены соответственно со вторым выходом буферного запоминающего устройства 3 для выдачи соответствующих кодов моментов времени пеленга α(tk) и β(tk).
Шина третьего входа блока оценивания параметров движения соединена с шиной выхода 2 блока формирования базисных функций.
На фиг.6 входы 211...21K-го дифференциатора соединены со второй шиной блока формирования базисных функций, входы 211...21K-го дифференциатора соединены с первыми входами 221...22K-го перемножителей, вторые входы которых соединены с шиной выхода блока оценивания, выходы умножителей 221...22K соединены соответственно с 1...K входом сумматора 23, выход которого соединен с первым входом сумматора 25, выход сумматора 23 соединен со вторым входом сумматора 36, вход дифференциатора 24 соединен с выходной шиной блока оценивания, выход которого соединен со вторым входом сумматора 25 и с первым входом сумматора 36, выход сумматора 25 соединен с первым входом делителя 29, выход сумматора 36 соединен с первым входным делителем 40. Первые входы умножителей 261...26K соединены с шиной выхода 2 блока формирования базисных функций, вторые входы умножителя 261...26K соединены с выходом блока оценивания.
Выходы умножителей 261...26K соединены соответственно с 1...K входом сумматора 27, выход которого соединен со вторым входом делителя 29, выход которого соединен с первым входом вычислителя ψAJ(tK). Выходная шина блока оценивания соединена с первыми входами 301...30K - умножителей, вторые входы которых соединены со второй шиной выхода блока преобразования базисных функций, 301...30K - умножителей соединены соответственно с 1...K со входом сумматора 31, выход которого соединен с первым входом делителя 32, первый и второй входы умножителя 34 соединены с выходной шиной 2 буферного запоминающего устройства, второй вход делителя 32 соединен с выходом сумматора 27, выход сумматора 31 соединен с первым и вторым входом умножителя 38, выход сумматора 27 соединен с первым и вторым входом умножителя 37, выход умножителя 38 соединен с первым входом сумматора 39, выход умножителя 37 соединен со вторым входом сумматора 39, выход которого соединен со входом вычислителя корня квадратного 44.
Выход делителя 32 соединен со входом дифференциатора 33, выход которого соединен с первым входом умножителя 35, выход умножителя 34 соединен со вторым входом умножителя 35, выход которого соединен с выходной шиной блока и с шиной первого входа вычислителя ψAJ(tK). Выход вычислителя корня квадратного 44 соединен со вторым входом делителя 40, выход которого соединен с входом дифференциатора 41, выход которого соединен с первым входом умножителя 42. Первый и второй входы умножителя 43 соединены соответственно со вторым выходом буферного запоминающего устройства 3 для выдачи соответствующих кодов моментов времени пеленга α(tk) и β(tk), выход умножителя 43 соединен со вторым входом умножителя 42, выход которого соединен с шиной первого входа вычислителя ψAJ(tK).
На фиг.7 первый и второй входы умножителя 45 соединены соответственно со вторым выходом буферного запоминающего устройства 3 для выдачи соответствующих кодов моментов времени пеленга α(tk) и β(tk), первый и второй входы умножителя 46 соединены с шиной выхода 2 БЗУ, первые входы умножителей 47, 48 соединены с выходной шиной вычислителя 18, первые выходы умножителя 47, 48 соединены соответственно с первым и вторым входами сумматора 49, выход которого соединен со вторым входом умножителя 52, первый вход которого соединен с выходной шиной вычислителя 18. Первый вход умножителя 50, первый вход умножителя 53, второй вход умножителя 51, второй вход вычислителя соединены соответственно со вторым выходом буферного запоминающего устройства 3 для выдачи соответствующих кодов моментов времени пеленга α(tk) и β(tk). Второй вход умножителя 50, первый вход умножителя 51 соединены с выходной шиной вычислителя 18. Выход умножителя 52 соединен с первым входом сумматора 54, второй вход которого соединен с выходом умножителя 50. Выход сумматора 54 соединен с первым входом делителя 56, выход умножителя 51 соединен со вторым входом умножителя 53, выход которого соединен с первым входом вычислителя 55, выход которого соединен со вторым входом делителя 56, выход которого соединен с выходом блока 19 и входом блока 20.
На фиг.8 вход линии задержки соединен соответственно со вторым выходом буферного запоминающего устройства 3 для выдачи соответствующих кодов моментов времени пеленга α(tk) и β(tk) со вторым входом вычитателя 60 и со вторым входом умножителя 61, выход линии задержки 57 соединен с первым входом вычитателя 60, выход которого соединен с первым входом умножителя 61, выход которого соединен с первым входом умножителя 62, второй вход которого соединен с выходной линией вычислителя 19. Выход умножителя 62 через сумматор 63 и экспоненциатор 64 соединен с первым входом умножителя 65, на второй вход которого поступает код начальной дальности, первый и второй входы умножителя 58 и первый, второй входы умножителя 59 соединены соответственно со вторым выходом буферного запоминающего устройства 3 для выдачи соответствующих кодов моментов времени пеленга α(tk) и β(tk), выходы множителей 58, 59 соединены соответственно со вторыми входами умножителей 66, 68. Второй вход умножителя 67 соединен соответственно со вторым выходом буферного запоминающего устройства 3 для выдачи соответствующих кодов моментов времени пеленга α(tk) и β(tk). Выход умножителя 65 соединен с первыми входами умножителей 66, 67, 68.
На фиг.9 первые входы 691...69L(3K+2)-го преобразователя соединены соответственно со вторым выходом буферного запоминающего устройства 3 для выдачи соответствующих кодов моментов времени пеленга α(tk) и β(tk), вторые входы 691...69L(3K+2)-го преобразователя соединены с третьей выходной шиной синхронизатора. Выходы 691...69L(3K+2)-го преобразователя соединены с третьими входами БРСЛАУ 5 и БОПД 8.
На фиг.10 вход синхронизатора соединен со входом линии задержки 70, вторым входом триггера 71, первым входом счетчика 72 и со вторым входом счетчика 74. Выход линии задержки 70 соединен с первым входом триггера 71. Первый выход счетчика 72 соединен с первым входом счетчика 74 и шиной второго выхода синхронизатора, которая соединена с шиной второго входа БРСЛАУ 5. Первый выход счетчика 74 соединен со вторым входом счетчика 72. Выход 2 счетчика 72 соединен с входом дешифратора 73. Выход 2 счетчика 74 соединен со входом дешифратора 75, 76. Выходы 1, 2 триггера 71, шина выхода дешифратора 73 и шина выхода дешифратора 75 образуют первый выход синхронизатора 4. Выход 1 счетчика 72 соединен с первым входом триггера 77, выход которого соединен с первым входом счетчика 74, первый выход которого соединен с входом 2 триггера 77. Выходная шина дешифратора 76 образует выходную шину третьего выхода синхронизатора.
Заявленное устройство реализует метод определения параметров движения объекта по угловым измерениям и начальному значению дальности для случая полиномиальной траектории с неизвестными коэффициентами.
Будем полагать, что в декартовой системе координат, в центре которой находится ППС, движение объекта описывается полиномиальной моделью с неизвестными коэффициентами

где x=x(t), y=y(t), z=z(t) - декартовы координаты объекта;
А={а, i=0, 1, ..., K}, B={b, i=0, 1, ..., K}, C={c, i=0, 1, ..., K} - вектор-строки коэффициентов модели движения;
Q={q, i=0, 1, ..., K}T - вектор-столбец линейно независимых функций qi=qi(t);
Т - знак транспонирования.
С помощью УС измеряются углы азимута α=α(t) и места β=β(t). Кроме того, полагается, что в момент времени t0 известно начальное значение наклонной дальности r0=r(t0), которое на практике задается либо абсолютно точно (например, в момент старта летательного аппарата), либо приближенно. Последний случай характерен для ситуации, когда помимо УС имеется активная высокоточная система локации, которая периодически выдает УС текущий замер наклонной дальности. В перерывах между замерами УС функционирует автономно.
С учетом того, что x=rcosαcosβ, y=rsinαcosβ, z=rsinβ, запишем соотношения

Выберем в векторе С одну ненулевую компоненту (например, сj, j ∈ 0, 1, ...K) и преобразуем (2) к виду

где
Aj={aj/cj, j=0, 1, ..., K}={aij, j=0, 1, ..., K},
Bj={bj/cj, j=0, 1, ..., K}={bij, j=0, 1, ..., K},
C(j)={c0/cj, ..., cj-1/cj, cj+1/cj, ..., cK/cj,}={cij, i=0, 1, ..., K, i≠j},
Q(j)={q0, ..., qj-1, qj+1, ..., qK}={cij, 0, 1, ..., K, i≠j}.
Из (2) и (3) после несложных преобразований получаем

Введем временную сетку {t0, ..., tN} (где ti ∈ [t0, T], i=0, 1, ..., N), к узлам которой привязаны измерения α(ti), β(ti), i=0, 1, ..., N, выполняемые УС. На данной сетке сформируем L несовпадающих наборов Tl={t0(l), ..., tP(l)}, где l=1, 2, ..., L, P≤N, ti(l) ∈ {t0, ..., tN}, ti+l(i)>ti(i), T(l)<T(m)≠0, l, m ∈ {1, 2, ..., L}.
Если предположить, что для фиксированного l ∈ {1, 2, ..., L} имеется массив угловых измерений {α(tk(l),) β(tk(l),) k=0, 1, ..., P}, где Р=3K+2, то для нахождения неизвестных векторных коэффициентов A(j), B(j) и С(j) необходимо решить систему линейных алгебраических уравнений

Следует помнить, что наборы Tl (l={1, 2, ..., L}) используются только на первом этапе и при отсутствии ошибок измерений приводят к одному и тому же решению системы (5). Однако наличие ошибок измерений позволяет рассматривать задачу оценивания векторных коэффициентов Aj, Вj и C(j) как статистическую.
Нахождением из (5) значений векторов Aj, Bj и C(j) заканчивается первый этап определения параметров движения цели в соответствии с разработанным методом.
Дифференцируя раздельно числитель и знаменатель выражения (3) по времени t, можно записать

где под символом f(l) понимается первая производная от функции f(.).
Разделяя переменные, система (6) преобразуется к виду

где dr и dt - дифференциалы зависимой и независимой переменных соответственно.
Из (7) следует, что задача определения дальности r=r(t) по данным угломерных измерений описывается линейными дифференциальными уравнениями. Интегрируя (7), получим

где  соответствует либо
соответствует либо  , либо
, либо 
Из(8)следует
где r0=r0(t) - начальное условие для решения задачи Коши.
Для того чтобы избавиться в выражении (9) от производных α(l)=α(l)(τ) и β(l)=β(l)(τ), воспользуемся очевидными соотношениями, которые следуют непосредственно из (2), (3), (4) и (6)
 ,
,
 ,
,
 ,
,
Таким образом, из (9) следует, что наклонная дальность r=r(t) может быть найдена лишь по угловым измерениям α(τ), β(τ), τ ∈ [t0, t] и начальному значению r0.
По найденной дальности может быть восстановлено движение объекта
В свою очередь по определенным из (10) декартовым координатам легко вычисляются векторные коэффициенты А, В, С.
С учетом дискретного характера поступления замеров операцию интегрирования в (9) можно заменить конечной суммой

Формулы (9) и (11) задают соответственно непрерывный и дискретный варианты определения дальности.
Пассивная пеленгационная система (фиг.1) работает следующим образом. Коды измерения пеленгов α(tk), β(tk), k=0, 1, ... 3K+2 с выхода устройства формирования пеленгов 1 поступают на блок преобразователя 2. Блок 1 может быть выполнен, как показано в [6]. Блок преобразователей 2 может быть выполнен, как показано на фиг.2. Коды α(tk) и β(tk) поступают на 10, 11, 12, 13, 14 преобразователи кодов, на выходе преобразователя 10 коды cosβ(tk), на выходе преобразователя кодов 12 имеются коды sinα(tk), на выходе преобразователя кодов 13 коды sinβ(tk), преобразователь кодов 14 соответственно tgβ(tk). Соответствующие моменты времени пеленга α(tk) и β(tk) поступают на 3 вход буферного запоминающего устройства и записываются по сигналам управления с синтезатора 4 в регистры  . Коды cosα(tk), cosβ(tk), sinα(tk), sinβ(tk), tgβ(tk) записываются по сигналам управления с синхронизатора 4 соответственно в регистры
. Коды cosα(tk), cosβ(tk), sinα(tk), sinβ(tk), tgβ(tk) записываются по сигналам управления с синхронизатора 4 соответственно в регистры  ,
,  ,
,  ,
,  ,
,  По окончании записи кодов во все регистры буферного запоминающего устройства 3 последние по управляющему сигналу от синхронизатора 4 записываются в блок решения систем линейных алгебраических уравнений 5. Коды моментов времени поступают на первый вход блока формирования базисных функций 6 и на второй вход блока оценки параметров движения 8. Блок решения систем линейных алгебраических уравнений 5 может быть выполнен в соответствии с [8], последний обрабатывает заложенный в него порядок действий, и по аналогии счета коды Аi Вi С(i) i=0, 1, ..., K поступают на вход блока оценивания 7 (фиг.4), осуществляющего статистические оценивания рассчитываемых коэффициентов, так как в реальных условиях процесс пеленгования неизбежно сопровождается флуктуационными погрешностями. Оценки искомых коэффициентов с выхода блока оценивания 7 (фиг.4) поступают на первый вход блока оценивания параметров движения 8 (фиг.5; фиг.6; фиг.7; фиг.8). На третий вход блока оценивания параметров движения поступают коды базисных функций Q(tk) от блока формирования базисных функций (фиг.9), по сигналам управления от синхронизатора 4. Структура блока 8 (фиг.5) состоит из вычислителей 18, 19, 20. Вычислитель 18 (фиг.6) аппарата реализует выражение (6), и на его выходе имеются коды пропорционально γA(tk), α'(tk), β'(tk). Вычислитель 19 (фиг.7) аппарата реализует выражение (7), и на его выходе имеют место коды пропорционально ΨAj(tk). Вычислитель 20 (фиг.8) аппарата реализует выражения (10), (11), и на его выходе имеют место коды пропорционально декартовым координатам цели x, y, z на текущий момент времени, которые поступают на вход устройства отображения 9.
По окончании записи кодов во все регистры буферного запоминающего устройства 3 последние по управляющему сигналу от синхронизатора 4 записываются в блок решения систем линейных алгебраических уравнений 5. Коды моментов времени поступают на первый вход блока формирования базисных функций 6 и на второй вход блока оценки параметров движения 8. Блок решения систем линейных алгебраических уравнений 5 может быть выполнен в соответствии с [8], последний обрабатывает заложенный в него порядок действий, и по аналогии счета коды Аi Вi С(i) i=0, 1, ..., K поступают на вход блока оценивания 7 (фиг.4), осуществляющего статистические оценивания рассчитываемых коэффициентов, так как в реальных условиях процесс пеленгования неизбежно сопровождается флуктуационными погрешностями. Оценки искомых коэффициентов с выхода блока оценивания 7 (фиг.4) поступают на первый вход блока оценивания параметров движения 8 (фиг.5; фиг.6; фиг.7; фиг.8). На третий вход блока оценивания параметров движения поступают коды базисных функций Q(tk) от блока формирования базисных функций (фиг.9), по сигналам управления от синхронизатора 4. Структура блока 8 (фиг.5) состоит из вычислителей 18, 19, 20. Вычислитель 18 (фиг.6) аппарата реализует выражение (6), и на его выходе имеются коды пропорционально γA(tk), α'(tk), β'(tk). Вычислитель 19 (фиг.7) аппарата реализует выражение (7), и на его выходе имеют место коды пропорционально ΨAj(tk). Вычислитель 20 (фиг.8) аппарата реализует выражения (10), (11), и на его выходе имеют место коды пропорционально декартовым координатам цели x, y, z на текущий момент времени, которые поступают на вход устройства отображения 9.
Рассмотрим работу синхронизатора 4 (фиг.10).
Импульсы с выхода 2 устройства формирования пеленгов 1 (фиг.1) поступают на счетный вход счетчика 72, который формирует код адреса, поступающий на вход дешифратора 73. Импульсы со второго входа блока 1 также поступают на второй вход триггера 71, выходной сигнал которого устанавливает СОЗУ 151...156 в режим записи. На первый вход триггера 71 поступают импульсы со второго выхода блока 1 через элемент задержки 70, формируя на выходе сигналы считывания информации из СОЗУ 151...156. После подсчета 6 Ll(3k+2) импульсов, поступающих от блока 1, на выходе счетчика 72 появится импульс переполнения, который поступает на вход 1 счетчика 74 и на выход 2 устройства синхронизации, который дает команду «Пуск» для начала вычислений. Импульс переполнения поступает на 1 вход триггера 77, на выходе которого устанавливается сигнал запуска счетчика 74, который формирует адрес считывания с регистра 161...16L 6(3K+2). Код адреса поступает на дешифраторы 75, 76, которые определяют порядок считывания кодов из регистров 161...16L 6(3K+2) кодов с БЗУ 3 фиг.1 и БФБ 6 фиг.1.
Импульс переполнения с входа 1 счетчика 74 поступает на вход 2 триггера 77, который устанавливает счетчик 74 в режим запрещения счета, и на вход 2 счетчика 72, который устанавливает его в режим разрешения счета, и цикл повторяется вновь.
ЛИТЕРАТУРА
1. Патент Российской Федерации №2124222, С1, 6G01S 13/46.
2. Патент Российской Федерации №2012902, 5G01S 13/46, 1974.
3. Авторское свидетельство СССР №1508235, G06F 15/36, 1987.
4. Авторское свидетельство СССР №1097072, G01S /1352, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2298804C2 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| СИСТЕМА ПАССИВНОЙ ЛОКАЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1991 |
|
RU2050557C1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| Устройство отождествления наборов данных | 1989 |
|
SU1654810A1 |
| УСТРОЙСТВО ОТОЖДЕСТВЛЕНИЯ НАБОРОВ ДАННЫХ | 2010 |
|
RU2427884C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПО МИНИМАЛЬНОМУ ЧИСЛУ ПЕЛЕНГОВ | 2009 |
|
RU2406098C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ КОРАБЕЛЬНЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМ | 1989 |
|
SU1841105A1 |



Изобретение относится к радиолокации и может быть использовано в радионавигации, метеорологии, геодезии. Заявляемое устройство позволяет определять параметры криволинейных траекторий по угломерным данным неподвижного пеленгатора и начальной дальности до объекта, что является достигаемым техническим результатом. Устройство содержит блок формирования пеленгов, блок преобразователей, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, блок оценивания, блок оценивания параметров движения, устройство отображения, синхронизатор, блок формирования базисных функций. 10 ил.
Устройство пассивной пеленгационной системы, содержащее устройство формирования пеленгов, буферное запоминающее устройство, блок решения систем линейных алгебраических уравнений, устройство отображения, синхронизатор, блок оценивания рассчитываемых коэффициентов, отличающееся тем, что в него дополнительно введены блок преобразователей, блок формирования базисных функций, блок оценивания параметров движения, при этом первый выход устройства формирования пеленгов соединен с третьим входом буферного запоминающего устройства для записи соответствующих кодов моментов времени пеленга α(tk) и β(tk) и с первым входом блока преобразователей, выход которого соединен с первым входом буферного запоминающего устройства для записи кодов cosα(tk), cosβ(tk), sinα(tk), sinβ(tk) и tgβ(tk), первый выход буферного запоминающего устройства для выдачи кодов cosα(tk), cosβ(tk), sinα(tk), sinβ(tk) и tgβ(tk) соединен с первым входом блока решения систем линейных алгебраических уравнений, первый выход которого через блок оценивания рассчитываемых коэффициентов соединен с первым входом блока оценивания параметров движения, выход которого через устройство отображения соединен с выходом устройства пассивной пеленгационной системы, второй выход буферного запоминающего устройства для выдачи соответствующих кодов моментов времени пеленга α(tk) и с β(tk) соединен с первым входом блока формирования базисных функций и со вторым входом блока оценивания параметров движения, первый выход блока формирования базисных функций соединен с третьим входом блока решения систем линейных алгебраических уравнений, второй выход блока формирования базисных функций соединен с третьим входом блока оценивания параметров движения, второй выход устройства формирования пеленгов соединен со входом синхронизатора, первый выход которого соединен со вторым входом для сигналов управления буферного запоминающего устройства, второй выход со вторым входом блока решения систем линейных алгебраических уравнений, третий выход со вторым входом блока преобразования базисных функций, где α(tk) - значение угла азимута в зависимости от момента времени tk, а β(tk) - значение угла места в зависимости от момента времени tk.
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1992 |
|
RU2012902C1 |
| СИСТЕМА ПАССИВНОЙ ЛОКАЦИИ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1991 |
|
RU2050557C1 |
| JP 2000147099 A, 26.05.2000 | |||
| US 3789409 A, 29.01.1974 | |||
| Устройство для измерения температурного коэффициента емкости | 1957 |
|
SU112021A2 |

