Изобретение относится к системам сигнализации, реагирующим на несколько нежелательных или ненормальных условий, с последовательным опросом центральной станцией объектов наблюдения и передачей на центральную станцию сигналов, определяющих местоположение и состояние объекта с использованием радиоканала. Заявляемый способ предназначен для обеспечения непрерывного самоконтроля и дистанционного персонифицированного наблюдения состояния подвижных объектов и окружающей их среды, а также определения их местоположения в рабочей зоне с отображением результатов на диспетчерском пункте. Способ может быть использован для наблюдения за личным составом, действующим в условиях повышенного риска, например подразделений МЧС, действующих в условиях ликвидации последствий природных и техногенных катастроф, групп МВД, ФСБ, выполняющих специальные операции, а также при тушении пожаров, горноспасательных операциях, при контроле за пациентами клиник в реабилитационный период и т.п. Использование заявляемого способа позволяет подвижным объектам непрерывно осуществлять самоконтроль параметров своего состояния и параметров окружающей среды, а с диспетчерского пункта - наблюдать эти параметры, определять местоположение подвижных объектов. Результаты мониторинга позволяют оперативно оценивать сложившуюся ситуацию, принимать меры по оказанию помощи личному составу, эвакуации его и т.п., а за счет этого повысить выживаемость таких подразделений в экстремальных условиях.
Во всех рассмотренных выше случаях проблема дистанционного наблюдения за подвижными объектами распадается на решение следующих задач;
- Идентификационную, заключающуюся в выборе определенного подвижного объекта среди множества подобных.
- Навигационную, заключающуюся в определении местоположения выбранного объекта, а может быть направления, скорости движения и т п.
- Телеметрическую, состоящую в дистанционном измерении параметров состояния выбранного объекта и окружающей его среды.
Определим термины, содержащиеся в названии изобретения. Мониторинг - наблюдение за состоянием окружающей среды (атмосферы, гидросферы, техногенных систем) с целью контроля, прогноза и охраны (Большой энциклопедический словарь. М.,1999).
Под телемониторингом будем понимать дистанционное решение задач мониторинга.
Комплексный телемониторинг означает наблюдение за несколькими параметрами объекта и окружающей среды, в определяющей степени характеризующими их состояние.
В технике известны методы решения каждой из перечисленных задач. В рассматриваемом случае подвижный объект является "дружественным" или "своим", что упрощает решение задачи за счет снабжения его ответчиком. Функции ответчика в данном случае не ограничиваются дистанционным мониторингом, т.е. решением радиотехнических задач (идентификация, навигация и телеметрия), но требуют наличия у ответчика определенного "интеллекта" для самооценки состояния подвижного объекта и окружающей его среды с целью информирования подвижного объекта о нештатной ситуации.
Особенности задачи, решаемой заявляемым способом, состоят в следующем:
1. Подвижный характер объектов наблюдения предполагает использование беспроводных (радио) каналов связи.
2. Необходимость идентификации десятков - сотен объектов делает ее более сложной по сравнению с наблюдением за летательными аппаратами (которых обычно немного), но более простой по сравнению с наблюдением за автотранспортом.
3. Определенность зоны наблюдения и неопределенность конкретного местоположения и траектории движения объектов наблюдения.
4. Необходимость контроля и самоконтроля состояния подвижного объекта, причем параметры состояния более сложны, чем в случае охранной сигнализации, где состояние оценивается по правилу "открыто - закрыто", но более просты по сравнению с телевизионным наблюдением, где объем информационного обмена велик.
5. Необходимость контроля состояния среды, окружающей конкретный объект наблюдения. Для параметров среды характерны те же особенности, что и в предыдущем случае.
6. Необходимость непрерывной реализации п.4 и 5.
7. Необходимость автономной оценки объектом наблюдения собственного состояния и состояния окружающей среды.
8. Необходимость централизованной оценки состояния объектов наблюдения и состояния окружающей среды в том числе, когда сам объект наблюдения недееспособен.
9. Все перечисленные задачи необходимо решать комплексно и оперативно.
Известны (патент РФ 94038221 ОПРАШИВАЕМЫЙ ПО РАДИО ПАССИВНЫЙ ДАТЧИК ПА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ) способы наблюдения за объектами, заключающиеся в том, что на подвижные объекты  устанавливают пассивные ответчики, согласованные с определенным параметром Рi,
устанавливают пассивные ответчики, согласованные с определенным параметром Рi,  зондирующего сигнала, с диспетчерского пункта последовательно посылают зондирующий радиосигнал с параметром Рi,
зондирующего сигнала, с диспетчерского пункта последовательно посылают зондирующий радиосигнал с параметром Рi,  , в выбранном ответчике, у которого параметр Pj приемника совпал с параметром зондирующего сигнала Pi формируют импульс приема, из которого вырабатывают ответный сигнал, в диспетчерском пункте принимают этот сигнал и по нему проводят идентификацию объекта (определяют наличие объекта наблюдения), а при наличии нескольких диспетчерских пунктов (базовых станций) появляется возможность определения координат подвижного объекта. При использовании в качестве ответчиков приборов на поверхностных акустических волнах имеется возможность изменять параметры Рi, у пассивных ответчиков в соответствии с изменением состояния S объекта наблюдения, например температуры, что в принципе позволяет дистанционно измерить этот параметр и тем самым оценить свойства объекта.
, в выбранном ответчике, у которого параметр Pj приемника совпал с параметром зондирующего сигнала Pi формируют импульс приема, из которого вырабатывают ответный сигнал, в диспетчерском пункте принимают этот сигнал и по нему проводят идентификацию объекта (определяют наличие объекта наблюдения), а при наличии нескольких диспетчерских пунктов (базовых станций) появляется возможность определения координат подвижного объекта. При использовании в качестве ответчиков приборов на поверхностных акустических волнах имеется возможность изменять параметры Рi, у пассивных ответчиков в соответствии с изменением состояния S объекта наблюдения, например температуры, что в принципе позволяет дистанционно измерить этот параметр и тем самым оценить свойства объекта.
Недостатками описанного способа являются узкий класс решаемых задач и плохие энергетические свойства (слабый сигнал пассивных отражателей). Первый недостаток связан с тем, что у пассивных ответчиков количество измеряемых параметров состояния объекта наблюдения не превышает одного, да и его измерение связано с серьезными проблемами по исключению влияния на отраженный сигнал других факторов. Плохие энергетические свойства пассивных отражателей приводят к ограниченным возможностям реализации такого способа по дальности действия и помехоустойчивости.
Известен "Способ наблюдения за транспортными средствами на маршруте движения" (патент РФ 2157565, приоритет 10.06.99), заключающийся в том, что задают маршрут движения, номер и плановые текущие координаты подвижного транспортного средства на маршруте, принимают подвижным транспортным средством навигационные сигналы от глобальной спутниковой системы радионавигации, выделяют из принятых навигационных сигналов информацию о действительных текущих координатах подвижного транспортного средства, информацию о подвижном транспортном средстве преобразуют в электрический сигнал и периодически передают через систему сотовой связи в информационно-аналитический центр, где информацию принимают, обрабатывают, хранят и отображают, сравнивают действительные текущие координаты подвижного транспортного средства с плановыми, а при возникновении нештатной ситуации отображают на электронной карте местности текущие и заданные координаты этого подвижного транспортного средства, при наличии сигнального сообщения отображают также смысловое содержание, время передачи сигнального сообщения и номер транспортного средства, на основе анализа полученной информации принимают решение об оперативных действиях.
Недостатками таких способов являются узкий класс решаемых задач и ограниченная область использования. Первый недостаток связан с тем, что наблюдению подвергается практически только маршрут движения транспортного средства и небольшое количество сигнальных сообщений, вводимых водителем вручную. Зоны возможного применения такого способа ограничены областями достижимости системы сотовой связи.
Известен способ наблюдения за объектами ("Термомонитор", патент РФ 2155941 приоритет 12.10.99), заключающийся в том, что подвижный объект снабжают автономным, носимым монитором с датчиками состояния объекта (температуры). Монитор в течение времени наблюдения периодически опрашивает датчики состояния и запоминает результаты опроса с последующей передачей всех результатов наблюдения для обработки.
Недостатки такого способа - низкая оперативность, связанная с невозможностью быстрого реагирования на нештатную ситуацию, а также невозможность определения навигационных параметров объекта наблюдения в процессе мониторинга.
Наиболее близким к заявляемому является "Способ определения координат подвижных объектов и устройство для его осуществления" (патент РФ 2106694, G 08 R 25/00, приоритет 10.03.98), заключающийся в том, что задают рабочую зону, на все  на подвижные объекты устанавливают мониторы и по крайней мере три базовые станции
на подвижные объекты устанавливают мониторы и по крайней мере три базовые станции  m≥3 радионаблюдения с индивидуальными адресами, Ak,
m≥3 радионаблюдения с индивидуальными адресами, Ak,  , а также диспетчерский пункт, который соединяют каналом связи с одной базовой станцией - центральной (j=1), для зондирования излучают последовательно радиосигналы адреса и прямой измерительный, измерительные сигналы дальности формируют не менее, чем на двух базовых станциях и передают по радиоканалу в центральную базовую станцию, а затем по каналу связи в диспетчерский пункт, где вычисляют координаты соответствующих объектов. Данный способ предназначен для обеспечения охраны подвижных объектов с использованием радиоканала с возможностью определения их координат при нападении или несанкционированном проникновении. Способ предполагает наличие на подвижном объекте монитора (абонентского сигнализатора), который в нештатной ситуации связывается по радиоканалу с базовыми станциями, сообщая свой адрес и вырабатывая измерительный сигнал.
, а также диспетчерский пункт, который соединяют каналом связи с одной базовой станцией - центральной (j=1), для зондирования излучают последовательно радиосигналы адреса и прямой измерительный, измерительные сигналы дальности формируют не менее, чем на двух базовых станциях и передают по радиоканалу в центральную базовую станцию, а затем по каналу связи в диспетчерский пункт, где вычисляют координаты соответствующих объектов. Данный способ предназначен для обеспечения охраны подвижных объектов с использованием радиоканала с возможностью определения их координат при нападении или несанкционированном проникновении. Способ предполагает наличие на подвижном объекте монитора (абонентского сигнализатора), который в нештатной ситуации связывается по радиоканалу с базовыми станциями, сообщая свой адрес и вырабатывая измерительный сигнал.
Недостатками данного способа являются низкая надежность мониторинга и узкий класс решаемых задач. Низкая надежность обусловлена тем, что данный способ основан на асинхронном способе взаимодействия монитора на подвижном объекте и базовых станций, т.е. обмен информацией начинается только при возникновении нештатной ситуации, либо при контрольном вызове диспетчерского пункта объектом наблюдения при проверке работы системы. В остальное время все элементы пассивны и не взаимодействуют друг с другом. При таком способе, например, выход подвижного объекта из зоны досягаемости или повреждение (отключение) монитора остается незаметным. Узкий класс решаемых задач, во-первых, связан с тем, что информационная посылка от монитора содержит лишь ограниченный круг сообщений, содержащих адресную, навигационную и сигнальную ("нападение", "контроль", "вызов скорой помощи" и т.п.), поэтому в диспетчерском пункте формируется ограниченный круг сообщений. Во-вторых, данный способ предполагает стационарное размещение базовых станций и стационарных сигнализаторов с известными и не меняющимися координатами на местности, что не позволяет решать задачу мониторинга оперативно.
Задачей, на решение которой направлен заявляемый способ является обеспечение оперативного, автономного и комплексного мониторинга (наблюдения) подвижных объектов. Под оперативностью мониторинга понимается возможность быстрого развертывания системы наблюдения в заранее неизвестной местности, где отсутствуют стационарные пункты наблюдения и с неизвестными условиями функционирования, т. е. факторами, влияющими на работу подвижных объектов. Под автономностью мониторинга понимается возможность наблюдающей системы относительно самостоятельно решать задачи привязки к местности, измерения и оценки состояния объекта и окружающей среды, причем даже по таким параметрам, которые неощутимы для самого объекта наблюдения (например, уровень радиации для человека), а также сигнализировать о нештатной ситуации, как самому объекту наблюдения, так и наблюдающим органам. Под комплексностью мониторинга понимается возможность сбора и оценки большого числа параметров состояния объекта наблюдения и окружающей среды, характеризующих достаточно подробно состояние подвижного объекта и окружающей среды
Поставленная задача решается тем, что в способе комплексного телемониторинга подвижных объектов, заключающемся в том, что задают рабочую зону, на все  подвижные объекты устанавливают мониторы и по крайней мере три базовые станции
подвижные объекты устанавливают мониторы и по крайней мере три базовые станции  m≥3 радионаблюдения с индивидуальными адресами, Аk,
m≥3 радионаблюдения с индивидуальными адресами, Аk,  , а также диспетчерский пункт, который соединяют каналом связи с одной базовой станцией - центральной (j=1), для зондирования излучают радиосигналы адреса, управляющий и прямой измерительный, измерительные сигналы дальности формируют не менее чем на двух базовых станциях и передают по радиоканалу в центральную базовую станцию, а затем по каналу связи в диспетчерский пункт, где вычисляют координаты соответствующих объектов, задание рабочей зоны, установку базовых станций, диспетчерского пункта и мониторов выполняют оперативно перед началом телемониторинга, исходя из соответствующих факторов риска, выбирают тип датчиков состояния подвижного объекта и окружающей среды, устанавливают их на подвижные объекты и подключают к соответствующим мониторам, вводят в мониторы индивидуальные предельно допустимые параметры состояния подвижного объекта и окружающей среды, перед началом телемониторинга внешними средствами определяют координаты центральной базовой станции, а также координаты или азимут другой базовой станции на местности, после этого, а также в ходе телемониторинга при изменении количества и положения базовых станций, поочередного
, а также диспетчерский пункт, который соединяют каналом связи с одной базовой станцией - центральной (j=1), для зондирования излучают радиосигналы адреса, управляющий и прямой измерительный, измерительные сигналы дальности формируют не менее чем на двух базовых станциях и передают по радиоканалу в центральную базовую станцию, а затем по каналу связи в диспетчерский пункт, где вычисляют координаты соответствующих объектов, задание рабочей зоны, установку базовых станций, диспетчерского пункта и мониторов выполняют оперативно перед началом телемониторинга, исходя из соответствующих факторов риска, выбирают тип датчиков состояния подвижного объекта и окружающей среды, устанавливают их на подвижные объекты и подключают к соответствующим мониторам, вводят в мониторы индивидуальные предельно допустимые параметры состояния подвижного объекта и окружающей среды, перед началом телемониторинга внешними средствами определяют координаты центральной базовой станции, а также координаты или азимут другой базовой станции на местности, после этого, а также в ходе телемониторинга при изменении количества и положения базовых станций, поочередного  , выбирают и по команде, с диспетчерского пункта в центральную базовую станцию, зондируют базовые станции, координаты базовых станций при необходимости отображают в диспетчерском пункте, периодически принимают в мониторы сигналы от датчиков состояния подвижного объекта и окружающей среды, запоминают их показания в мониторе в виде блока телеметрической информации и сравнивают с предельно допустимыми, при превышении или при поступлении соответствующего управляющего сигнала включают на мониторе сигнал нештатной ситуации, поочередного
, выбирают и по команде, с диспетчерского пункта в центральную базовую станцию, зондируют базовые станции, координаты базовых станций при необходимости отображают в диспетчерском пункте, периодически принимают в мониторы сигналы от датчиков состояния подвижного объекта и окружающей среды, запоминают их показания в мониторе в виде блока телеметрической информации и сравнивают с предельно допустимыми, при превышении или при поступлении соответствующего управляющего сигнала включают на мониторе сигнал нештатной ситуации, поочередного  , выбирают и по команде, с диспетчерского пункта в центральную базовую станцию, зондируют мониторы, координаты мониторов при необходимости отображают в диспетчерском пункте, по окончании зондирования передают блок телеметрической информации выбранного монитора через центральную базовую станцию в диспетчерский пункт, где его принимают, оценивают состояние выбранного подвижного объекта, при необходимости отображают состояние подвижного объекта, при возникновении нештатной ситуации увеличивают частоту выбора соответствующего монитора, а также принимают меры для помощи подвижному объекту. При этом, зондирование выбранною объекта -базовой станции или монитора проводят с центральной базовой станции, при этом последовательно излучают радиосигналы адреса выбранного объекта Аk,
, выбирают и по команде, с диспетчерского пункта в центральную базовую станцию, зондируют мониторы, координаты мониторов при необходимости отображают в диспетчерском пункте, по окончании зондирования передают блок телеметрической информации выбранного монитора через центральную базовую станцию в диспетчерский пункт, где его принимают, оценивают состояние выбранного подвижного объекта, при необходимости отображают состояние подвижного объекта, при возникновении нештатной ситуации увеличивают частоту выбора соответствующего монитора, а также принимают меры для помощи подвижному объекту. При этом, зондирование выбранною объекта -базовой станции или монитора проводят с центральной базовой станции, при этом последовательно излучают радиосигналы адреса выбранного объекта Аk,  , управляющий и прямой измерительный прямой измерительный с одинаковым для всех объектов параметром Q, в выбранном объекте, у которого поступивший адрес Аk, совпал с собственным адресом, дешифрируют управляющий сигнал и используют для задания режима его работы, при стандартном управляющем сигнале принимают прямой, формируют и излучают ответный измерительный радиосигнал с параметром F отличным от параметра Q, в каждой невыбранной базовой станции принимают прямой и ответный измерительные радиосигналы, обрабатывают, формируют измерительный сигнал дальности между ней и выбранным объектом.
, управляющий и прямой измерительный прямой измерительный с одинаковым для всех объектов параметром Q, в выбранном объекте, у которого поступивший адрес Аk, совпал с собственным адресом, дешифрируют управляющий сигнал и используют для задания режима его работы, при стандартном управляющем сигнале принимают прямой, формируют и излучают ответный измерительный радиосигнал с параметром F отличным от параметра Q, в каждой невыбранной базовой станции принимают прямой и ответный измерительные радиосигналы, обрабатывают, формируют измерительный сигнал дальности между ней и выбранным объектом.
Существенными отличиями заявляемого способа от известных аналогов является следующие.
- Оперативная установка базовых станций, диспетчерского пункта и мониторов связана с назначением предлагаемого способа и априорной неопределенностью условий их функционирования (факторов риска). Оперативность развертывания предполагает не только быстрое развертывание системы мониторинга, но и соответствующее конструктивное исполнение блоков, т.е. защищенное от пыли, влаги, температурных и иных воздействий, наличие установочных элементов (штанг, штативов, приспособлений для крепления у соответствующих элементов, а также ряд действий, в частности, определение координат базовых станций на местности. В известных аналогах, в частности, в прототипе, базовые станции, стационарные и абонентские сигнализаторы устанавливаются заранее, т.е. задолго до возникновения обстановки реального использования и в стационарных условиях, которые не предъявляют столь жестких требований к времени установки и исполнению блоков.
- Выбор типа датчиков состояния подвижного объекта и окружающей среды, исходя из соответствующих факторов риска, означает, что в каждых конкретных условиях типы датчиков могут оказаться различными. В частности, если подвижным объектом оказывается человек, то факторами риска являются температура, пульс и дыхание, что предполагает использование соответствующих датчиков. Выбор датчиков состояния окружающей среды зависит от особенностей обстановки (пожар, наводнение, боевые действия и т п.), а также от степени их влияния на подвижный объект. В известных аналогах системы измерения и сигнализации ориентированы только на конкретные условия риска и содержат соответствующие датчики, например датчики проникновения.
- Подключение датчиков к соответствующим мониторам. выполняемое оперативно, как правило, в полевых условиях, означает, что эти датчики должны иметь унифицированную систему быстрого подключения к мониторам, что предъявляет соответствующие требования к кабельной и коммутационной аппаратуре. В известных аналогах датчики устанавливаются заранее, т.е. задолго до возникновения обстановки реального использования и в стационарных условиях, которые не предъявляют столь жестких требований к времени установки и их исполнению.
- Ввод в мониторы индивидуальных предельно допустимых параметров состояния подвижного объекта и окружающей среды позволяет иметь в памяти монитора показатели условий, соответствующие реальным условиям применения, с учетом типа использующихся датчиков и их динамической характеристики, так и с учетом индивидуальных свойств подвижного объекта. Например, пульс 150 ударов в минуту для одних людей является запредельным, а для других допустимым. В экстремальных условиях, когда задача подвижного объекта должна быть решена вне зависимости от условий, в монитор могут быть введены предельно допустимые параметры, превышающие уровень существования подвижного объекта. В таких условиях будет решена задача разведки рабочей зоны. В известных аналогах предельно допустимые параметры изначально введены в монитор и не учитывают тип датчиков и индивидуальные свойства подвижного объекта.
- Определение координат одной базовой станции, а также координат или азимута другой базовой станции на местности перед началом телемониторинга внешними средствами ставят своей целью задать и привязать к местности положение хотя бы двух базовых станций, т.е. так, чтобы в дальнейшем получить автономными средствами привязку остальных. Привязка координат одной базовой станции к местности означает задание ее долготы, широты, а может быть и высоты (при необходимости работы не в плоскости, а в объеме). Такая привязка фиксирует положение геометрической фигуры, образованной базовыми станциями в одной точке, но не ограничивает ее поворот. Наличие координат второй базовой станции или азимута на нее из центральной станции, при известных дальностях между станциями, однозначно фиксирует положение всех станций на местности. Определение координат базовых станций на местности внешними средствами может быть осуществлено топогеодезическими методами, с использованием глобальных навигационных систем, типа ГЛОНАС или NAVSTAR. В некоторых случаях, когда рабочая зона невелика (при пожарах, поиске в горах и т.п.) привязка центральной и второй базовой станции может быть осуществлена визуально по отношению к видимым объектам на местности. Для всех базовых станций внешние способы определения координат могут оказаться слишком дорогими, требовать слишком большого времени, вопреки оперативности, а в некоторых случаях и опасными, исходя из условий рабочей зоны. В известных аналогах положение стационарных всех базовых станции определяется однократно и не требует оперативных измерений.
- Поочередное, после установки или, а также в ходе телемониторинга при изменении количества базовых станций  зондирование их по команде, с диспетчерского пункта в центральную базовую станцию ставит своей целью определение координат всех базовых станций с учетом привязки к местности двух станций. Эти координаты получают за счет определения дальностей между ними, причем с использованием тех же средств, которые впоследствии будут применяться для зондирования подвижных объектов, т.е. дешевыми средствами. Заметим, что за счет использования на базовых станциях тех же технических и программных средств для решения навигационной задачи, что и в мониторах удается существенно снизить затраты на разработку, изготовление и эксплуатацию базовых станций и мониторов, снижаются затраты и на определение координат базовых станций на местности внешними средствами. Кроме того, появляется возможность менять в ходе работ число и положение базовых станций на местности, например, при выходе их из строя, изменении рабочей зоны и т.п. При необходимости положение базовых станции отображается в диспетчерском пункте, например, на электронной карте местности. Такой способ обеспечивает гибкость системы мониторинга в части состава и расположения базовых станций. В известных аналогах координаты всех базовых станции определяются внешними средствами заранее.
зондирование их по команде, с диспетчерского пункта в центральную базовую станцию ставит своей целью определение координат всех базовых станций с учетом привязки к местности двух станций. Эти координаты получают за счет определения дальностей между ними, причем с использованием тех же средств, которые впоследствии будут применяться для зондирования подвижных объектов, т.е. дешевыми средствами. Заметим, что за счет использования на базовых станциях тех же технических и программных средств для решения навигационной задачи, что и в мониторах удается существенно снизить затраты на разработку, изготовление и эксплуатацию базовых станций и мониторов, снижаются затраты и на определение координат базовых станций на местности внешними средствами. Кроме того, появляется возможность менять в ходе работ число и положение базовых станций на местности, например, при выходе их из строя, изменении рабочей зоны и т.п. При необходимости положение базовых станции отображается в диспетчерском пункте, например, на электронной карте местности. Такой способ обеспечивает гибкость системы мониторинга в части состава и расположения базовых станций. В известных аналогах координаты всех базовых станции определяются внешними средствами заранее.
- Периодический прием в мониторы сигналов от датчиков состояния подвижного объекта и окружающей среды, и запоминание их показаний в мониторе в виде блока телеметрической информации позволяет непрерывно (с точностью до периода опроса, который может быть сделан маленьким) и активно (по инициативе монитора) осуществлять, как контроль параметров состояния самого объекта, так и окружающей среды, т.е. проводить комплексный мониторинг. Блок телеметрической информации может содержать информацию о текущих показаниях датчиков состояния подвижного объекта и окружающей среды, а также адрес монитора, время съема и т.п. В известных аналогах, как правило, наблюдению подвергается лишь один из параметров, что не позволяет иметь в диспетчерском пункте ясную картину происходящего с подвижным объектом. В прототипе, инициатором опроса является сам датчик, что не исключает пропуск нештатной ситуации при отключении или неисправности датчиков.
- Сравнение в мониторе результатов опроса датчиков состояния с предельно допустимыми величинами и включение сигнала нештатной ситуации, придает монитору определенный "интеллект", что позволяет объекту наблюдения не тратить время и силы на наблюдение за соответствующими датчиками и измерителями, непосредственно на месте действий оценить сложившуюся ситуацию, в том числе и по параметрам состояния, неощутимым для подвижного объекта. Отмеченная выше программируемость предельно допустимых параметров придает такой сигнализации гибкий характер. Возможность включения сигнализации нештатной ситуации по управляющему сигналу (команде) из диспетчерского пункта позволяет подвижному объекту иметь канал обратной связи от диспетчерского пункта. В известных аналогах в сигнальных датчиках (пожара, проникновения и т.п.) предельно допустимые параметры состояния, как правило, жестко заложены в сами датчики и не могут быть изменены.
- Поочередный  выбор и зондирование мониторов по команде, с диспетчерского пункта в центральную базовую станцию, имеет своей целью, во-первых, выбор соответствующего объекта среди множества других подобных с помощью адресного сигнала, во-вторых, определение их наличия и работоспособности (отсутствие ответа на периодический опрос может расцениваться в диспетчерском пункте, как "нештатная ситуация" с соответствующей реакцией), в-третьих задание режима работы с помощью управляющего сигнала позволяет иметь программируемый режим работы мониторов, т.е. наряду со стандартными режимами работы, описанными ниже, иметь нестандартные, например исключать решение навигационной или телеметрической задачи и т.п., в-четвертых, получение оценки дальностей от выбранного объекта до базовых станций с последующим расчетом текущих координат на местности. В известных аналогах, в частности, в прототипе, опрос производится по инициативе самого монитора, что может привести к потере связи с ним, например, при выходе из зоны наблюдения, неисправности и т.п. Управляющие сигналы не используются для задания режимов работы.
выбор и зондирование мониторов по команде, с диспетчерского пункта в центральную базовую станцию, имеет своей целью, во-первых, выбор соответствующего объекта среди множества других подобных с помощью адресного сигнала, во-вторых, определение их наличия и работоспособности (отсутствие ответа на периодический опрос может расцениваться в диспетчерском пункте, как "нештатная ситуация" с соответствующей реакцией), в-третьих задание режима работы с помощью управляющего сигнала позволяет иметь программируемый режим работы мониторов, т.е. наряду со стандартными режимами работы, описанными ниже, иметь нестандартные, например исключать решение навигационной или телеметрической задачи и т.п., в-четвертых, получение оценки дальностей от выбранного объекта до базовых станций с последующим расчетом текущих координат на местности. В известных аналогах, в частности, в прототипе, опрос производится по инициативе самого монитора, что может привести к потере связи с ним, например, при выходе из зоны наблюдения, неисправности и т.п. Управляющие сигналы не используются для задания режимов работы.
- Передача блока телеметрической информации выбранного монитора, хранящегося в его памяти, через центральную базовую станцию в диспетчерский пункт, оценка и отображение позволяют непрерывно контролировать состояние подвижных объектов и окружающей их среды в интересах разведки, оказания помощи подвижным объектам и т.п. В известных аналогах сигнальные сообщения от мониторов сами по себе являются свидетельствами нештатной ситуации, но не позволяют качественно оценить реальные события, случившиеся с объектом и вокруг него.
- Увеличение частоты выбора (зондирования и опроса состояния датчиков) соответствующего монитора, позволяет повысить внимание к подвижным объектам, находящимся в нештатной или близкой к ней ситуации, также принять меры соответствующей помощи. В известных аналогах сигнал нештатной ситуации принимается однократно и не позволяет оценивать динамику развития процессов в подвижном объекте.
- При зондировании выбранного объекта (базовой станции или монитора) с центральной базовой станции, последняя оказывается инициатором опроса, т.е. активно опрашивает объекта, не дожидаясь инициативного сигнала от объекта. Это повышает надежность мониторинга, исключает потерю контроля над объектом. В известных аналогах (прототипе) инициатором опроса является подвижный объект.
- Последовательное для зондирования излучение радиосигналов адреса выбранного объекта Ak , управляющего и прямого измерительного позволяет соответственно решить задачи обнаружения выбранного объекта (базовой станции или монитора), сообщить ему о желаемых действиях и, наконец определить его навигационные параметры. Управляющий сигнал (команда) может использоваться для задания специфических режимов работы мониторов или базовых станций, например, "зондирование монитора без передачи сведений о состоянии", "включить сигнал нештатной ситуации" (если были заданы слишком жесткие предельно допустимые значения параметров) и т.п. В известных аналогах управляющий сигнал предназначен лишь для улучшения условий обнаружения зондирующего сигнала объектом.
, управляющего и прямого измерительного позволяет соответственно решить задачи обнаружения выбранного объекта (базовой станции или монитора), сообщить ему о желаемых действиях и, наконец определить его навигационные параметры. Управляющий сигнал (команда) может использоваться для задания специфических режимов работы мониторов или базовых станций, например, "зондирование монитора без передачи сведений о состоянии", "включить сигнал нештатной ситуации" (если были заданы слишком жесткие предельно допустимые значения параметров) и т.п. В известных аналогах управляющий сигнал предназначен лишь для улучшения условий обнаружения зондирующего сигнала объектом.
- Излучение для зондирования прямых навигационных измерительных сигналов с одинаковым для всех объектов параметром Q, и формирование и излучение в выбранном объекте (базовой станции или мониторе), ответных измерительных радиосигналов с параметром F отличным от параметра Q упрощает реализацию приемной части выбранных мониторов и базовых станций, т.к. улучшает условия приема и разделения прямого и ответного измерительного сигнала в невыбранных базовых станциях на фоне помех и отражений этих сигналов от посторонних объектов. В известных аналогах, в частности в прототипе, измерительные сигналы от стационарных и подвижных сигнализаторов идентичны.
- Прием в каждой невыбранной базовой станции прямого и ответного измерительных радиосигналов, обработка и формирование измерительного сигнала дальности между ней и выбранным объектом приводит к тому, что основная работа по измерению дальностей производится в базовых станциях. В диспетчерском пункте производится только определение координат выбранных объектов. Такой подход обусловлен высокими "интеллектуальными" возможностями базовых станций и снижает нагрузку на диспетчерский пункт, повышая его производительность и увеличивая возможное число наблюдаемых объектов. В известных аналогах на базовых станциях производят лишь предварительную обработку измерительных сигналов, а основные вычисления передают в диспетчерский пункт.
Заявляемый способ иллюстрируется чертежами.
Фиг.1 - общая схема мониторинга.
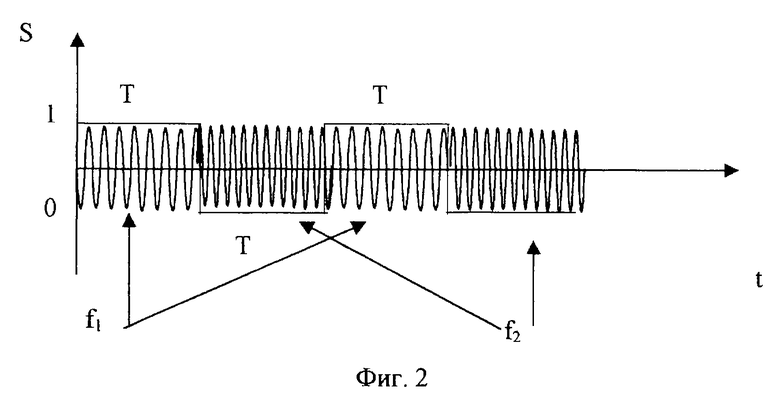
Фиг.2 - прямой измерительный частотно-модулированный сигнал.
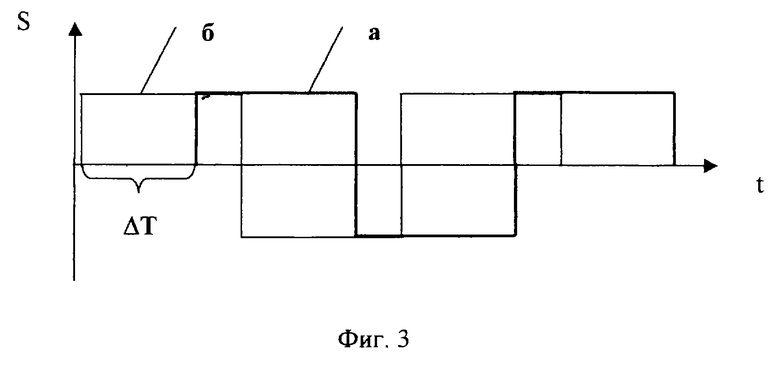
Фиг.3 - временная диаграмма измерения дальности.
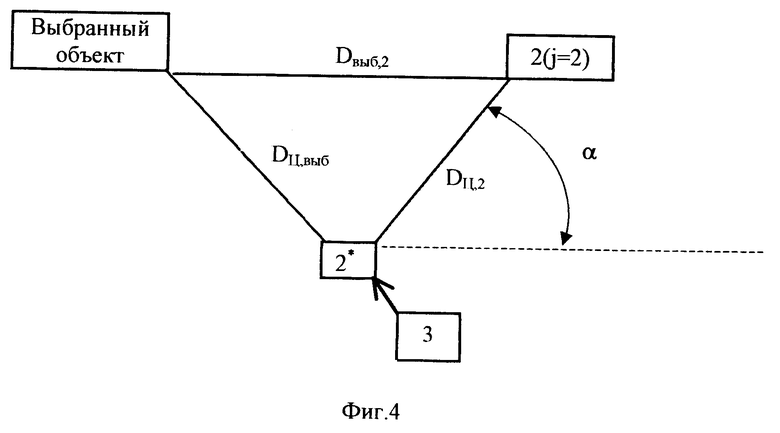
Фиг.4 - схема измерения координат выбранного объекта.
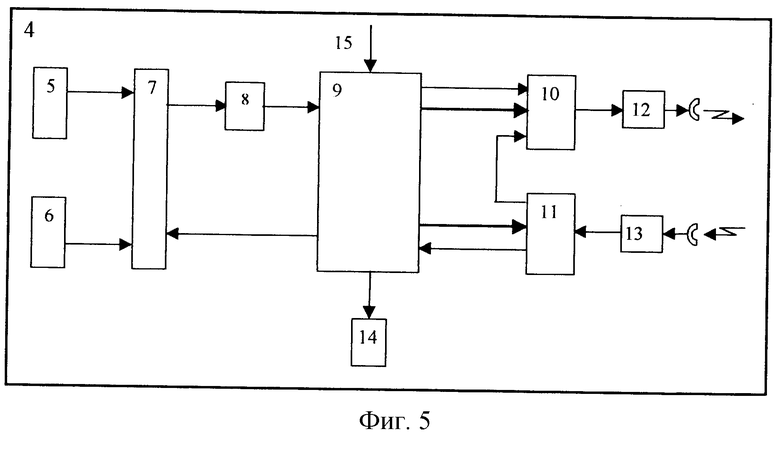
Фиг 5 - схема монитора.
Фиг.6 - схема базовой станции.
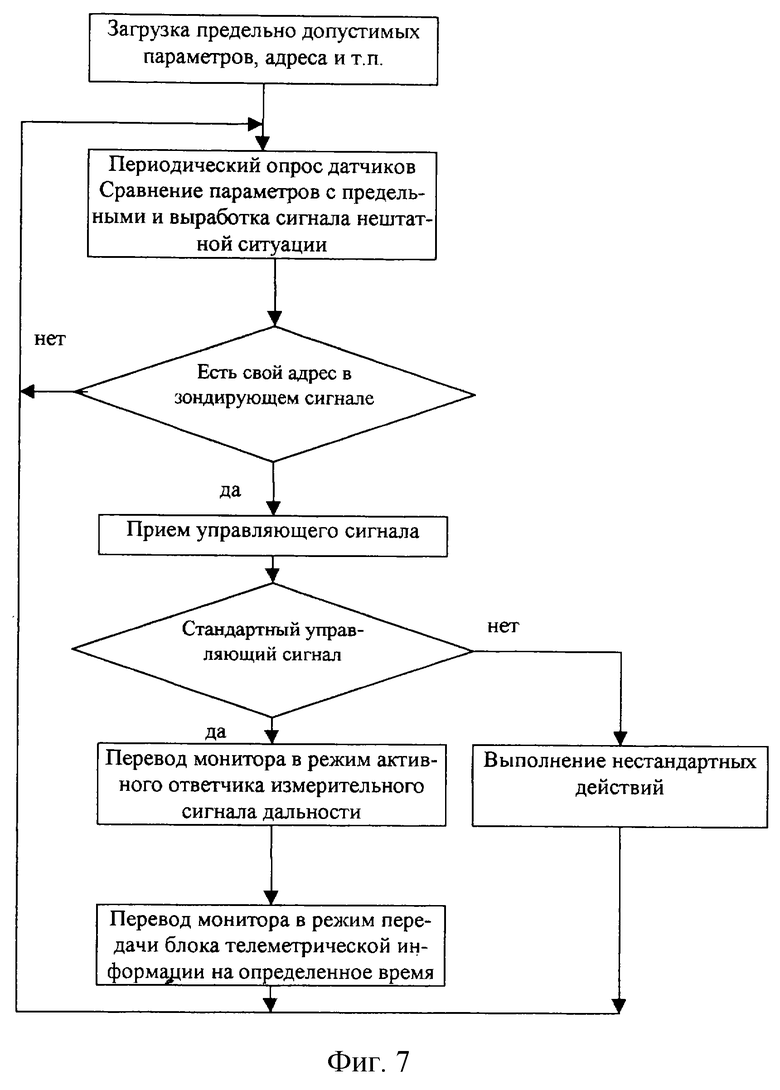
Фиг 7 - алгоритм работы микроконтроллера монитора,
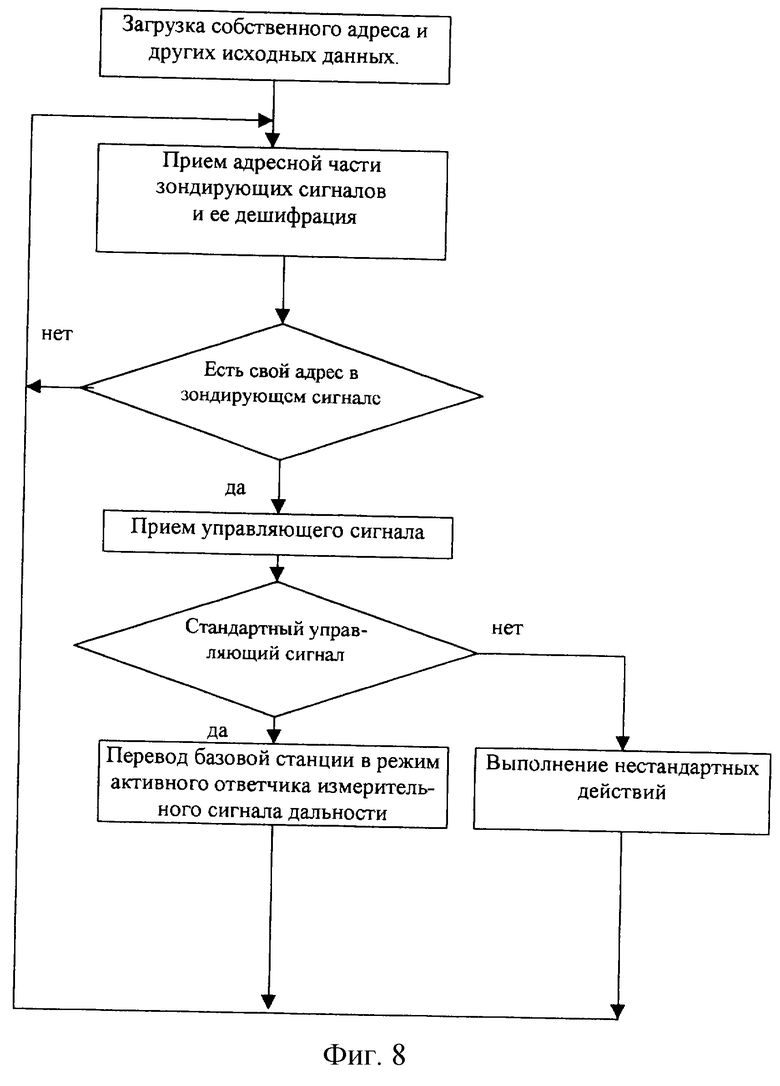
Фиг 8 - алгоритм работы микроконтроллера базовой станции при определении ее местоположения.
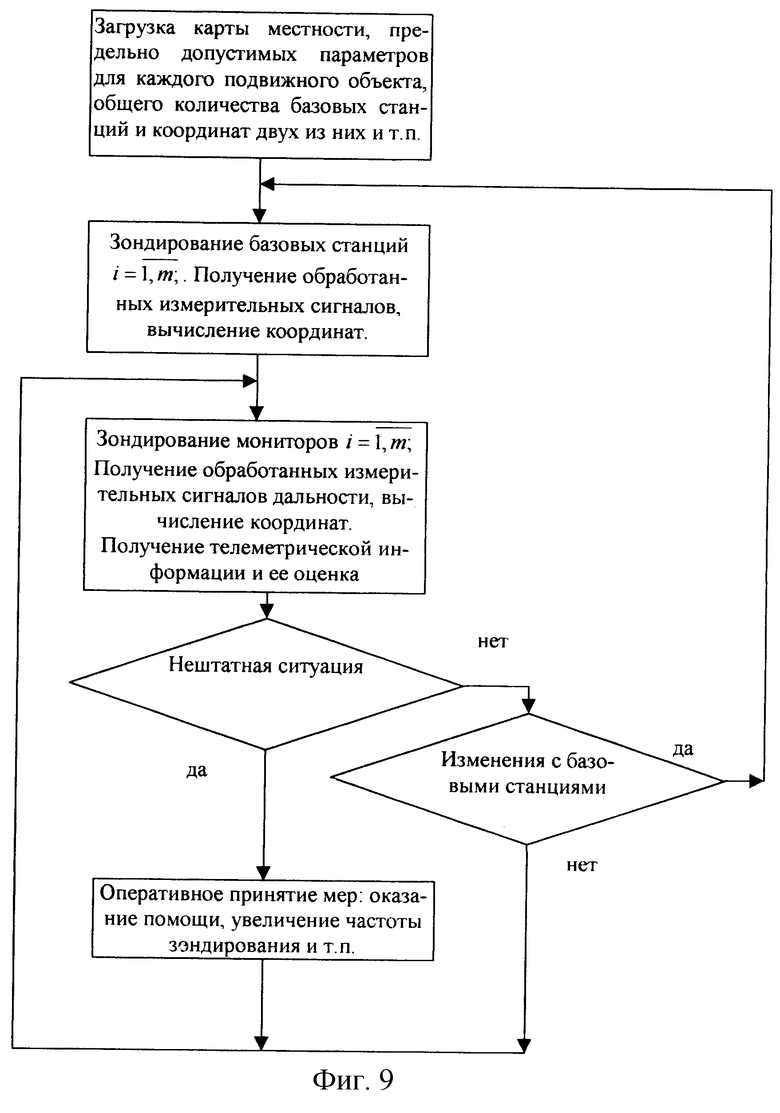
Фиг 9 - алгоритм работы диспетчерского пункта.
Общая схема мониторинга, иллюстрирующая заявляемый способ, приведена на фиг 1, где: 1 - рабочая зона, 2 - базовые станции, 2* - центральная базовая станция, 3 - диспетчерский пункт, 4 - подвижные объекты с мониторами, 5 - датчики состояния подвижного объекта, 6 - датчики состояния среды, окружающей подвижный объект.
Реализация заявляемого способа сводится к следующему.
Оперативно перед началом телемониторинга, исходя из факторов риска, задают рабочую зону 1. При задании рабочей зоны учитывают размер территории, на которой предполагается нахождение подвижных объектов, мощности передатчиков, чувствительность приемников и другие факторы.
Оперативно перед началом телемониторинга устанавливают по крайней мере три базовые станции 2  , m≥3 с индивидуальными адресами Ak,
, m≥3 с индивидуальными адресами Ak,  . Эти адреса могут быть заложены в память базовых станций при изготовлении или вводиться через канал связи. Перед началом телемониторинга внешними средствами определяют координаты одной базовой станции (обычно центральной 2*, j=1), а также координаты или азимут другой, например, второй (j= 2) базовой станции 2 на местности. Определение координат может производиться с использованием глобальных навигационных средств, топографическими методами, а в простейших случаях - визуально.
. Эти адреса могут быть заложены в память базовых станций при изготовлении или вводиться через канал связи. Перед началом телемониторинга внешними средствами определяют координаты одной базовой станции (обычно центральной 2*, j=1), а также координаты или азимут другой, например, второй (j= 2) базовой станции 2 на местности. Определение координат может производиться с использованием глобальных навигационных средств, топографическими методами, а в простейших случаях - визуально.
Оперативно перед началом телемониторинга устанавливают диспетчерский пункт 3, который соединяют каналом связи с одной базовой станцией - центральной 2*-(j=1). В качестве диспетчерского пункта используют персональную ЭВМ, которую обычно совмещают по расположению с центральной базовой станцией, тогда в качестве канала связи может быть использован последовательный канал ПЭВМ.
Оперативно перед началом телемониторинга на все  подвижные объекты 4 устанавливают мониторы. Исходя из соответствующих факторов риска, выбирают тип датчиков состояния подвижного объекта и окружающей среды, устанавливают их на подвижные объекты и подключают к соответствующим мониторам. Если объектами наблюдения являются люди, то в качестве датчиков состояния могут выступать датчики температуры, пульса и других наиболее важных физиологических параметров человека. Датчики состояния окружающей среды предназначены для оценки обстановки, окружающей подвижный объект. В качестве них могут использоваться датчики тех физических величин, которые наиболее важны в условиях данной рабочей зоны, например датчики температуры (при пожарах), датчики уровня радиации (при авариях на ядерных установках), газоанализаторы (при аномальных ситуациях на химических предприятиях) и т.п.
подвижные объекты 4 устанавливают мониторы. Исходя из соответствующих факторов риска, выбирают тип датчиков состояния подвижного объекта и окружающей среды, устанавливают их на подвижные объекты и подключают к соответствующим мониторам. Если объектами наблюдения являются люди, то в качестве датчиков состояния могут выступать датчики температуры, пульса и других наиболее важных физиологических параметров человека. Датчики состояния окружающей среды предназначены для оценки обстановки, окружающей подвижный объект. В качестве них могут использоваться датчики тех физических величин, которые наиболее важны в условиях данной рабочей зоны, например датчики температуры (при пожарах), датчики уровня радиации (при авариях на ядерных установках), газоанализаторы (при аномальных ситуациях на химических предприятиях) и т.п.
Рассмотрим более подробно процесс зондирования выбранного объекта (базовой станции 2 или монитора 4). По команде с диспетчерского пункта 3 в центральную базовую станцию 2*, фиг.1, 4 с последней зондируют их, т.е. последовательно излучают радиосигналы адреса выбранного объекта, управляющий и прямой измерительный сигнал дальности. При излучении всех перечисленных сигналов, а также при передаче телеметрической информации и обработанного измерительного сигнала дальности, могут использоваться частотно-модулированные сигналы (Диксон Р. К. Широкополосные системы. - М.: Связь, 1979). При этом единичному и нулевому значению соответствуют разные несущие частоты f1 и f2, см. фиг.2. При этом при передаче кодовых посылок (кодов адреса и управления, телеметрической информации, а также обработанного измерительного сигнала дальности) частотной модуляции подвергаются соответствующие коды. Во всех объектах (мониторах 4 и базовых станциях 2) дешифрируют адресный сигнал Аk. В выбранном объекте, поступивший код адреса Аk, совпадает с собственным адресом, поэтому он включается в работу. Выбранный объект принимает управляющий код, который определяет режим его работы. При стандартном управляющем сигнале выбранный объект переходит в режим переизлучения прямого измерительного сигнала дальности, поступающего с центральной базовой станции 2*. В качестве прямого измерительного сигнала используется частотно-модулированный меандр, причем период меандра 2Т выбирается так, чтобы обеспечить однозначное измерение дальности, т. е. длительность импульсов меандра Т, см. фиг.3, должна быть больше, чем интервал времени ΔT между прямым а и ответным б измерительным сигналом, отраженным от любой базовой станции или монитора в рабочей зоне и поступившими в невыбранную базовую станцию 2. В выбранном объекте принимают прямой измерительный сигнал дальности с параметром Q. В качестве параметра Q могут выступать частоты несущих f1 и f2. Формируют и излучают ответный измерительный радиосигнал с параметром F (другими частотами несущих f3 и f4), отличным от f1 и f2. В Не менее чем в двух невыбранных базовых станциях 2, в том числе и центральной 2*, принимают прямой и отраженный измерительный сигнал дальности. В центральной базовой станции 2* по временному интервалу между фронтами прямого и ответного измерительных сигналов дальности с учетом задержек в выбранном объекте и центральной базовой станции 2*, определяют дальность от центральной базовой станции 2* до выбранного объекта. Если выбранным объектом фиг.4 является вторая j=2 базовая станция 2, с известным азимутом α, то дальность DЦ2 однозначно задает координаты второй базовой станции 2. При зондировании другого выбранного объекта, фиг.4, в центральной базовой станции 2*, определяют дальность от нее до выбранного объекта DЦвыб, а в другой, например, во второй невыбранной базовой станции 2, по временному интервалу ΔT между фронтами прямого и ответного измерительных сигналов дальности с учетом задержек в выбранном объекте и во второй станции 2 определяют суммарную дальность DΣ = DЦвыб+Dвыб,2. Обработанный измерительный сигнал дальности DΣ передают по радиоканалу в центральную базовую станцию 2*, а затем по каналу связи в диспетчерский пункт 3, где вычисляют дальность от второй базовой станции 2 (с известными координатами) до выбранного объекта Dвыб,2 = DΣ-DЦвыб, а затем по известным координатам центральной 2* и второй 2 базовых станций и дальностям Dвыб,2 и DЦвыб, определяют координаты выбранного объекта.
Определяют координаты базовых станций 2 на местности, для чего в начале телемониторинга, а также в ходе его при изменении количества и положения базовых станций 2 по команде с диспетчерского пункта 3 в центральную базовую станцию 2* с последней поочередного  , зондируют их в соответствии с описанным выше способом. В диспетчерском пункте 3 при необходимости отображают координаты базовых станций 2.
, зондируют их в соответствии с описанным выше способом. В диспетчерском пункте 3 при необходимости отображают координаты базовых станций 2.
Вводят в мониторы 4 индивидуальные предельно допустимые параметры состояния подвижного объекта и окружающей среды. Если подвижными объектами являются люди, то для каждого из них существуют разные предельно допустимые параметры собственного состояния и состояния окружающей среды, с учетом опыта, (физиологических особенностей организма, важности решаемой задачи (в особо важных случаях задача должна быть решена вне зависимости от условий)
Снабжают мониторы автономной сигнализацией нештатной ситуации. Такая сигнализация может срабатывать при превышении параметров собственного состояния подвижною объекта или внешних условий предельно допустимых уровней, введенных перед началом работ, и позволяет объекту наблюдения (человеку) получить звуковое, световое и т.п. предупреждение о возникновении опасной ситуации, в том числе и в тех случаях, когда опасность неощутима для него, например в случае радиации. Сигнализация нештатной ситуации монитора 4 может включаться и принудительно по управляющему сигналу, поступившему с центральной базовой станции 2*. Это позволяет организовать канал обратной связи с диспетчерского пункта 3 к подвижному объекту 4.
Периодически принимают в мониторы 4 сигналы от датчиков состояния подвижного объекта 5 и окружающей среды 6, запоминают их показания в мониторе и сравнивают с предельно допустимыми, при превышении включают на мониторе 4 сигнал нештатной ситуации.
Определяют координаты мониторов 4 на местности, для чего по команде с диспетчерского пункта 3 в центральную базовую станцию 2* с последней зондируют их, также как было описано выше, т.е. поочередно  , выбирают мониторы, последовательно излучают с центральной базовой станции 2* радиосигналы адреса выбранного монитора, управляющий и прямой измерительный сигнал дальности и т.д. По окончании зондирования вычисляют координаты мониторов 4 и при необходимости отображают их.
, выбирают мониторы, последовательно излучают с центральной базовой станции 2* радиосигналы адреса выбранного монитора, управляющий и прямой измерительный сигнал дальности и т.д. По окончании зондирования вычисляют координаты мониторов 4 и при необходимости отображают их.
По окончании зондирования выбранный монитор 4 на определенное время переходит в режим передачи блока телеметрической информации (показаний датчиков выбранного монитора 4) через центральную базовую станцию 2* в диспетчерский пункт 3, где его принимают, оценивают и при необходимости отображают состояние выбранного подвижного объекта. По окончании времени передачи монитор возвращается в исходный режим.
При возникновении нештатной ситуации увеличивают частоту выбора соответствующего монитора 4, возможно вновь зондируют этот монитор 4 с передачей управляющего сигнала на включение сигнализации нештатной ситуации, а также принимают меры для помощи подвижному объекту.
Рассмотрим возможности технической реализации заявляемого способа.
Схема монитора 4 приведена на фиг.5, где 5 - датчики состояния подвижного объекта, 6 - датчики состояния окружающей среды, 7 - коммутатор датчиков, 8 - аналого-цифровой преобразователь, 9 - микроконтроллер, 10 - коммутатор передатчика, 11 - коммутатор приемника, 12 - передатчик с антенной, 13 - приемник с антенной, 14 - сигнализатор нештатной ситуации, 15 - канал связи с персональной ЭВМ.
Датчики состояния подвижного объекта 5 предназначены для преобразования параметров состояния в электрические сигналы. Выбор измеряемых параметров зависит от факторов риска объекта наблюдения, если таковым является человек (такой случай является основным в данном изобретении), то ими могут быть температура, пульс и т.п. В качестве датчиков могу выступать термоэлектрические преобразователи (терморезисторы, термотранзисторы), приемники биоэлектрических сигналов и т.п., снабженные соответствующими усилительными и согласующими устройствами.
Датчики состояния окружающей среды 6 предназначены для преобразования соответствующих параметров в электрические сигналы. В зависимости от задач мониторинга выбор параметров зависит от факторов риска рабочей зоны. При пожарах это могут быть температура, освещенность, загазованность, в условиях повышенной радиации - датчики излучений и т.п. Для измерения таких параметров состояния окружающей среды в качестве датчиков могут выступать термоэлектрические преобразователи (терморезисторы, термотранзисторы), фотоэлектрические преобразователи (фоторезисторы, фототранзисторы); газоанализаторы, дозиметры и т.п., снабженные соответствующими усилительными и согласующими устройствами.
Коммутатор датчиков 7 предназначен для последовательного опроса датчиков 5 и 6. Коммутатор имеет сигнальные входы по числу датчиков 5 и 6 и адресные входы от микроконтроллера 9, по которым происходит выбор опрашиваемого датчика. Выход коммутатора датчиков 7 соединен со входом аналого-цифрового преобразователя.
Аналого-цифровой преобразователь 8 предназначен для преобразования сигналов с выходов датчиков 5 и 6 в цифровую форму и может быть реализован в виде соответствующего интегрального АЦП.
Микроконтроллер 9 предназначен для приема и хранения предельно допустимых параметров состояния подвижного объекта и окружающей среды, последовательного опроса датчиков 5 и 6, сравнения их с предельно допустимыми, выработки сигнала нештатной ситуации, дешифрации адреса и управляющего сигнала, управления работой приемопередающей части монитора. Блок управления 9 может быть выполнен в виде однокристальной микроЭВМ с соответствующим программным обеспечением Все блоки, подключаются к микроконтроллеру через порты ввода-вывода, которые представляют собой адресуемые регистры, в которые процессор может послать определенный код для передачи соответствующему блоку или считать код, поступающий от соответствующего блока. Алгоритм работы микроконтроллера 9 приведен на фиг.7.
Коммутатор передатчика 10 предназначен для управления режимом передачи сигналов из монитора. Коммутатор передатчика имеет сигнальный вход от коммутатора приемника 11, откуда поступает принятый приемником прямой измерительный сигнал, сигнальный вход от микроконтроллера 9, по которому передается телеметрическая информация и управляющий вход от микроконтроллера 9, который определяет, какой из сигнальных входов должен быть подключен ко входу передатчика 12.
Коммутатор приемника 11 предназначен для управления приемом сигналов в микроконтроллер 9. Коммутатор имеет один сигнальный вход от приемника 13, два выхода: первый - для приема адресных и управляющих кодов в микроконтроллер 9, а второй - для прямого измерительного сигнала. Управляющий вход от микроконтроллера 9 переключает монитор из режима приема адресных и управляющих сигналов в режим переизлучения измерительного сигнала.
Передатчик с антенной 12 предназначен для передачи радиосигналов с частотами несущих f3, и f4 от монитора на базовые станции 2. В качестве переда-пика может использоваться передатчик частотно-модулированных сигналов.
Приемник с антенной 13 предназначен для передачи радиосигналов с частотами несущих f1 н f2 от центральной базовой станции к монитору. В качестве приемника может использоваться приемник частотно-модулированных сигналов.
Сигнализатор нештатной ситуации 14 предназначен для выработки звукового сигнала в случае превышения параметров состояния или по команде с диспетчерского пункта, поступившей в виде управляющего сигнала Сигнализатор управляется от микроконтроллера 9.
Канал связи с персональной ЭВМ 15 предназначен для ввода в монитор исходных данных для работы. В качестве таких данных выступают предельно допустимые параметры состояния подвижного объекта и окружающей среды, адрес монитора. Канал связи с ПЭВМ 15 выполнен в виде последовательного интерфейса связи ПЭВМ с микроконтроллером 9.
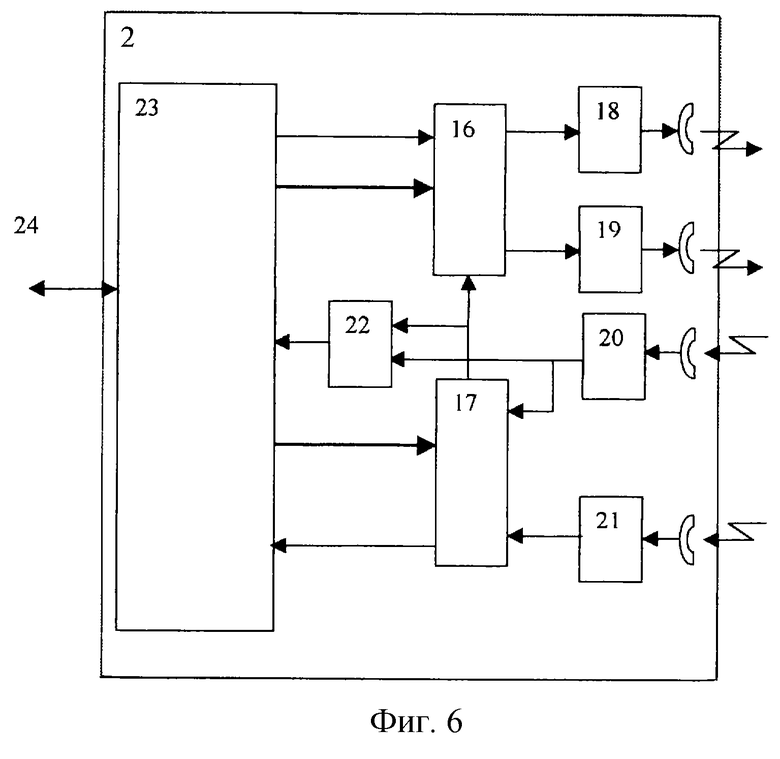
Схема центральной базовой станции 2* приведена на фиг.6, где 16 - коммутатор передатчика, 17 - коммутатор приемника, 18 - передатчик с антенной (частоты несущих f3 и f4), 19 - передатчик с антенной (частоты несущих f1 и f2), 20 - приемник с антенной (частоты несущих f3 и f4), 21 - приемник с антенной (частоты несущих f1 и f2), 22 - фазовый детектор, 23 - микроконтроллер базовой станции, 24 - канал связи с ПЭВМ.
Функции остальных базовых станций 2 несколько иные, чем у центральной 2*, в частности, им нет необходимости вырабатывать зондирующий сигнал, а также принимать телеметрическую информацию, но они должны передавать в центральную базовую станцию 2* обработанный измерительный сигнал дальности. С целью унификации все базовые станции 2 могут быть выполнены по единой схеме, а их функции изменяться путем передачи соответствующих управляющих сигналов.
Коммутатор передатчика 16 предназначен для управления режимом передачи сигналов из базовой станции 2. Коммутатор передатчика имеет сигнальный вход от коммутатора приемника 17, откуда поступает принятый приемником 20 прямой измерительный сигнал, сигнальный вход от микроконтроллера 22, по которому передаются адреса, управляющие сигналы, обработанный измерительный сигнал дальности. Выходы коммутатора 16 соединены с передатчиками 18 и 19. Управляющий вход от микроконтроллера 23 определяет, какой из сигнальных входов будет использоваться и к какому из передатчиков 18 или 19 он должен быть подключен.
Коммутатор приемника 17 предназначен для управления приемом сигналов в базовую станцию. Коммутатор имеет два сигнальных входа от приемников 20 и 21, два выхода: первый - для приема адресного, управляющего, обработанного измерительного или телеметрического сигналов, второй - для приема прямого измерительного сигналов. Управляющий вход от микроконтроллера 23 переключает базовую станцию в режимы приема адресных, управляющих сигналов (для всех базовых станций 2, кроме центральной 2*), приема телеметрической или обработанной измерительной информации (для центральной базовой станций 2), в режим приема прямого измерительного сигнала, а также включает в работу приемники 20 или 21.
Передатчик с антенной 18 (частоты несущих f1 и f2), предназначен для передачи радиосигналов от базовой станции мониторам и на другие базовые станции. В качестве передатчика может использоваться передатчик частотно-модулированных сигналов.
Передатчик с антенной 19 (частоты несущих f3 и f4), предназначен для передачи радиосигналов от базовой станции 2 мониторам 4 и на другие базовые станции 2. В качестве передатчика может использоваться передатчик частотно-модулированных сигналов.
Приемник с антенной 20 предназначен для приема радиосигналов от базовых станций 2 и мониторов 4 с частотами несущих f3 и f4. В качестве приемника может использоваться приемник частотно-модулированных сигналов.
Приемник с антенной 21 предназначен для приема радиосигналов от базовых станций 2 и мониторов 4 с частотами несущих f1 и f2. В качестве приемника может использоваться приемник частотно-модулированных сигналов.
Антенны приемников и передатчиков в мониторах и базовых станциях могут быть совмещены с использованием антенных коммутаторов, управляемых от соответствующего микроконтроллера.
Фазовый детектор 22 предназначен для определения величины ΔT, определяющей фазовый сдвиг между прямым и ответным измерительными сигналами дальности. Он может быть выполнен в виде счетчика, начинающего счет тактовых импульсов по переднему фронту прямого измерительного сигнала дальности и заканчивающего счет по прямым и переднему фронту ответного измерительного сигнала дальности.
Микроконтроллер базовой станции 23 предназначен для приема адресного и управляющего сигналов и их дешифрации; приема телеметрической информации и обработанного измерительного сигнала дальности (для центральной базовой станции) приема величины ΔТ от фазового детектора 22, расчета, формирования и управления излучением обработанного измерительного сигнала дальности, а также для управления базовой станцией 2. Микроконтроллер базовой станции 23 может быть выполнен в виде однокристальной микроЭВМ, в частности, сигнального процессора с соответствующим программным обеспечением. Все блоки подключаются к микроконтроллеру 23 через порты ввода-вывода, которые представляют собой адресуемые регистры, в которые он может послать определенный код для передачи соответствующему блоку или считать код, поступающий от соответствующего блока. Алгоритм работы микроконтроллера 23 при зондировании выбранных базовых станций приведен на фиг 8.
Канал связи с персональной ЭВМ 24 предназначен для ввода в базовую станцию (микроконтроллер 23) исходных данных для работы, а для центральной базовой станции 2* - для взаимодействием с диспетчерским пунктом 3. В качестве исходных данных могут выступать: адрес базовой станции 2, режим ее работы (центральная или нет) и т. п.. Канал связи 24 выполнен в виде последовательного интерфейса связи ПЭВМ с микроконтроллером 23.
Диспетчерский пункт 3 предназначен для управления всей системой мониторинга, обработки и отображения информации. Диспетчерский пункт 3 может быть реализован в виде персональной ЭВМ с соответствующим программным обеспечением и каналом связи с центральной базовой станцией. Алгоритм работы диспетчерского пункта приведен на фиг 9.
Рассмотрим работу устройства, реализующего заявляемый способ.
Перед началом мониторинга производят установку базовых станций 2 и через канал 24 вводят в них исходные данные от переносной персональной ЭВМ, которую затем отключают. Во всех базовых станциях, кроме центральной, микроконтроллер 23 переводит коммутатор 17 в режим приема зондирующих сигналов от приемника 21 с частотами несущих f1 и f2, а коммутатор передатчика 16 в режим передачи (ретрансляции) измерительных через передатчик 19 с частотами несущих f3 и f4. На подвижные объекты 4 устанавливают мониторы с датчиками 5 и 6, выбранными, исходя из факторов риска рабочей зоны.
Процедура зондирования базовых станций 2 (мониторов 4) с целью определения их навигационных параметров происходит следующим образом. С диспетчерского пункта 3 в центральную базовую станцию 2* через канал 24 поступает команда на зондирование выбранного объекта, например, второй базовой станции 2 (монитора 4). В центральной базовой 2* станции включаются в работу передатчик 18 с частотами несущих f1 и f2 и приемник 20 с частотами несущих f3 и f4. Микроконтроллер 23 последовательно выводит адрес второй базовой станции (монитора), управляющий сигнал (команду) и прямой измерительный сигнал (меандр), которые излучаются в виде прямого частотно-манипулированного измерительного сигнала через передатчик 18.
Приемники 21 (13) базовых станций 2 (мониторов 4) принимают эти сигналы и через коммутатор 17 (11) поступают в микроконтроллер 23 (9). При совпадении поступившего адреса с собственным адресом базовой станции 2 (монитора 4) соответствующий микроконтроллер 23 (9) принимает и дешифрирует управляющий сигнал (команду). Если поступившая команда стандартная, то в выбранный объект переходит в режим ретрансляции прямого измерительного сигнала, который через приемник 21 (13), коммутатор 17 (11) поступает на коммутатор 16 (10) и излучается в виде частотно-манипулированного сигнала с частотами несущих f3 и f4 через передатчик с антенной 19 (12). Прямой измерительный сигнал с частотами несущих f1 и f2 и ответный с частотами несущих f3 и f4 поступает во все невыбранные базовые станции 2, соответственно на приемники 21 и 20.
Фазовый детектор 22 производит оценку временного интервала ΔT между фронтами прямого и ответного сигналов и подает его в микроконтроллер 23. Последний обрабатывает информацию с фазового детектора 22 (масштабирует, при необходимости снабжает служебной информацией) и через коммутатор 16 и передатчик 19 передает в виде обработанного измерительного сигнала в приемник 20, коммутатор 17, центральную базовую станцию 2*, а затем в диспетчерский пункт 3. Получив аналогичным образом измерительные сигналы дальности от всех базовых станций 2, в диспетчерском пункте 3 определяют координаты выбранной (второй) базовой станции 2 (выбранного монитора).
При передаче обработанных измерительных сигналов от невыбранных базовых станций 2 в центральную 2* может возникнуть конфликт из-за одновременной передачи информации от нескольких базовых станций, который может быть устранен либо повторным зондированием, либо посылкой в конфликтующие базовые станции 2 зондирующего сигнала с управляющим сигналом, предписывающим повторить передачу обработанного измерительного сигнала.
После окончания зондирования всех базовых станций 2 в диспетчерском пункте 3 определяют координаты базовых станций и при необходимости отображают их, например, на электронной карте местности.
Выбирают тип и количество датчиков 5 и 6 и подключают их к мониторам 4. Устанавливают мониторы на подвижном объекте. Вводят через канал 15 исходные данные для работы от переносной персональной ЭВМ, которую затем отключают. Подвижные объекты приступают к работе в рабочей зоне 1. Микроконтроллер 9 периодически и поочередно через коммутатор 7 подключает датчики 5 и 6 к преобразователю 8, считывает их показания и запоминает в виде блока телеметрической информации.
Периодически по команде с диспетчерского пункта 3 зондируют мониторы 4. Определение координат мониторов производят так же, как и базовых станций, однако после окончания ретрансляции прямого измерительного сигнала в ответный, микроконтроллер 9 переводит выбранный монитор 4 на определенное время в режим передачи блока телеметрической информации. Эта передача производится из микроконтроллера 9 через коммутатор 10 и передатчик с антенной 12. Телеметрический блок принимается в центральной базовой станции 2* через приемник 20, коммутатор 17, микроконтроллер 23, канал 24 в диспетчерский пункт 3. В последнем при необходимости отображают номер выбранного монитора, его координаты, а также телеметрическую информацию. Сравнение поступивших в диспетчерский пункт 3 показания датчиков 5 и 6 сравниваются с предельно допустимыми. По результатам сравнения принимаются соответствующие меры.
Преимуществами заявляемого способа комплексного телемониторинга подвижных объектов являются:
1. Возможность комплексного телемониторинга подвижных объектов с определением их местоположения, параметров окружающей среды и состояния самого подвижного объекта.
2. Возможность оперативного решения задач телемониторинга с быстрым развертыванием базовых станций, изменением их положения и их количества, изменением типа и количества датчиков состояния окружающей среды и подвижного объекта, учетом индивидуальных свойств подвижного объекта в ходе мониторинга.
3. Возможность автономного функционирования телемониторов с информированием подвижного объекта о возникновении нештатной ситуации.
4. Возможность решения задач разведки в условиях неопределенности, а также оказания оперативной помощи подвижным объектам в нештатных ситуациях.
5. Дешевизна реализации способа, благодаря унификации базовых станции и мониторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЛЕКСНОГО ТЕЛЕМОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2487418C1 |
| Многофункциональная система радиозондирования атмосферы | 2016 |
|
RU2626410C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2273055C1 |
| СПОСОБ РАДИОПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2253578C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ С ФАЗОМОДУЛИРОВАННЫМ КАНАЛОМ ТЕЛЕМЕТРИИ | 2021 |
|
RU2787777C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ОРИЕНТИРОВАНИЯ ИНВАЛИДОВ ПО ЗРЕНИЮ В ЗАМКНУТОМ И ОТКРЫТОМ ПРОСТРАНСТВАХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2737914C2 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
Изобретение относится к системам сигнализации, реагирующим на несколько нежелательных или ненормальных условий, с последовательным опросом центральной станцией объектов наблюдения и передачей на центральную станцию сигналов, определяющих местоположение и состояние объекта с использованием радиоканала. Техническим результатом является обеспечение оперативного, автономного и комплексного мониторинга подвижных объектов и окружающей среды. Способ предполагает оперативную установку на подвижные объекты мониторов с выбранными, исходя из факторов риска, датчиками состояния объектов и окружающей среды, задание предельно допустимых значений их показаний, размещение базовых и центральной станций с диспетчерским пунктом, автономный опрос датчиков, оценку состояния подвижного объекта и выработку сигнала нештатной ситуации для подвижного объекта, зондирование базовых станций и мониторов, определение их навигационных параметров и снятие показаний датчиков. 1 з.п. ф-лы, 9 ил.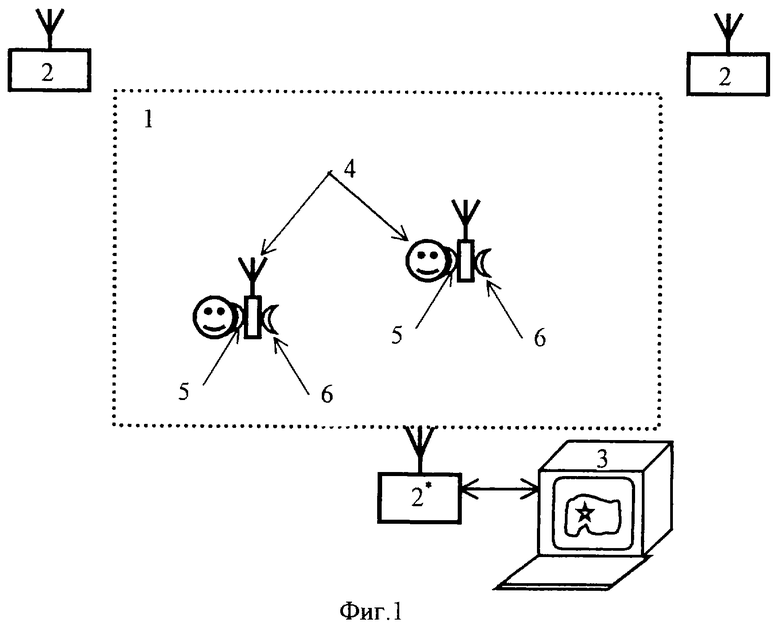
 подвижные объекты, устанавливают мониторы и по крайней мере три базовые станции
подвижные объекты, устанавливают мониторы и по крайней мере три базовые станции  , m≥3, радионаблюдения с индивидуальными адресами Аk,
, m≥3, радионаблюдения с индивидуальными адресами Аk,  , а также диспетчерский пункт, который соединяют каналом связи с одной базовой станцией - центральной (j= 1), для зондирования излучают радиосигналы адреса, управляющий и прямой измерительный, измерительные сигналы дальности формируют не менее, чем на двух базовых станциях, и передают по радиоканалу в центральную базовую станцию, а затем по каналу связи в диспетчерский пункт, где вычисляют координаты соответствующих объектов, отличающийся тем, что перед началом телемониторинга задают рабочую зону, устанавливают базовые станции, диспетчерский пункт и мониторы, исходя из соответствующих факторов риска, выбирают тип датчиков состояния подвижного объекта и окружающей среды, устанавливают их на подвижные объекты и подключают к соответствующим мониторам, вводят в мониторы индивидуальные предельно допустимые параметры состояния подвижного объекта и окружающей среды, внешними средствами определяют координаты одной базовой станции, а также координаты или азимут другой базовой станции на местности, в ходе телемониторинга при изменении количества и положения базовых станций поочередно
, а также диспетчерский пункт, который соединяют каналом связи с одной базовой станцией - центральной (j= 1), для зондирования излучают радиосигналы адреса, управляющий и прямой измерительный, измерительные сигналы дальности формируют не менее, чем на двух базовых станциях, и передают по радиоканалу в центральную базовую станцию, а затем по каналу связи в диспетчерский пункт, где вычисляют координаты соответствующих объектов, отличающийся тем, что перед началом телемониторинга задают рабочую зону, устанавливают базовые станции, диспетчерский пункт и мониторы, исходя из соответствующих факторов риска, выбирают тип датчиков состояния подвижного объекта и окружающей среды, устанавливают их на подвижные объекты и подключают к соответствующим мониторам, вводят в мониторы индивидуальные предельно допустимые параметры состояния подвижного объекта и окружающей среды, внешними средствами определяют координаты одной базовой станции, а также координаты или азимут другой базовой станции на местности, в ходе телемониторинга при изменении количества и положения базовых станций поочередно  выбирают и по команде с диспетчерского пункта в центральную базовую станцию зондируют базовые станции, координаты базовых станций отображают в диспетчерском пункте, периодически принимают в мониторы сигналы от датчиков состояния подвижного объекта и окружающей среды, запоминают их показания в виде блока телеметрической информации и сравнивают с предельно допустимыми, при превышении или при поступлении соответствующего управляющего сигнала включают сигнал нештатной ситуации, поочередно
выбирают и по команде с диспетчерского пункта в центральную базовую станцию зондируют базовые станции, координаты базовых станций отображают в диспетчерском пункте, периодически принимают в мониторы сигналы от датчиков состояния подвижного объекта и окружающей среды, запоминают их показания в виде блока телеметрической информации и сравнивают с предельно допустимыми, при превышении или при поступлении соответствующего управляющего сигнала включают сигнал нештатной ситуации, поочередно  выбирают и по команде с диспетчерского пункта в центральную базовую станцию зондируют мониторы, координаты мониторов отображают в диспетчерском пункте, по окончании зондирования передают блок телеметрической информации выбранного монитора через центральную базовую станцию в диспетчерский пункт, где его принимают, оценивают состояние выбранного подвижного объекта, отображают состояние подвижного объекта, при возникновении нештатной ситуации увеличивают частоту выбора соответствующего монитора, а также принимают меры для помощи подвижному объекту.
выбирают и по команде с диспетчерского пункта в центральную базовую станцию зондируют мониторы, координаты мониторов отображают в диспетчерском пункте, по окончании зондирования передают блок телеметрической информации выбранного монитора через центральную базовую станцию в диспетчерский пункт, где его принимают, оценивают состояние выбранного подвижного объекта, отображают состояние подвижного объекта, при возникновении нештатной ситуации увеличивают частоту выбора соответствующего монитора, а также принимают меры для помощи подвижному объекту. , управляющий и прямой измерительный с одинаковым для всех объектов параметром Q, в выбранном объекте, у которого поступивший адрес Аk совпал с собственным адресом, дешифрируют управляющий сигнал и используют для задания режима работы выбранного объекта, принимают прямой, формируют и излучают ответный измерительный радиосигнал с параметром F, отличным от параметра Q радиосигнала, излученного с центральной базовой станции, в каждой невыбранной базовой станции принимают прямой и ответный измерительные радиосигналы, обрабатывают, формируют измерительный сигнал дальности между ней и выбранным объектом.
, управляющий и прямой измерительный с одинаковым для всех объектов параметром Q, в выбранном объекте, у которого поступивший адрес Аk совпал с собственным адресом, дешифрируют управляющий сигнал и используют для задания режима работы выбранного объекта, принимают прямой, формируют и излучают ответный измерительный радиосигнал с параметром F, отличным от параметра Q радиосигнала, излученного с центральной базовой станции, в каждой невыбранной базовой станции принимают прямой и ответный измерительные радиосигналы, обрабатывают, формируют измерительный сигнал дальности между ней и выбранным объектом.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2106694C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 1999 |
|
RU2157565C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |
| US 5548822, 15.06.1994 | |||
| US 6265974, 30.06.1999. | |||

