Изоб)етение относится к теплоэнергетике и может.быть использовано- для автоматического регулирования теплоэнергетических объектов, работающих в широком диапазоне изменения нагрузок.
. Известен способ каскадного регулирования технологического параметра теплоэнергетического объекта, преимущественно парогенератора, путем изменения положения регулирующего органа по динамически преобразованной сумме отклонения стабилизируемой .величины от заданного значения и корректирующего сигнала, пропорционального динамически преобразо.ванному сигналу отклонения регулируемого параметра от сигнала задания,, измерения нагрузки объекта, изменения по ней коэффициентов динамических преобразований и сравнения ее с заданной величиной lj
Недостаток известного способа каскадного регулирования - снижение быстродействия при пониженных нагрузках, вследствие увеличения меньшей постоянной времени эквивалентного объекта регулирования со снижением нагрузки объекта.
Цель изобретения - увеличение быстродействия при пониженных нагрузках.
Поставленная цель достигается тем, что сигнал задания дифференцируют с постоянной времени, зависящей от нагрузки объектами при нагрузке объекта меньше заданной величины корректируют отклонение регулируе10мого параметра по дифференцированному сигналу задания.
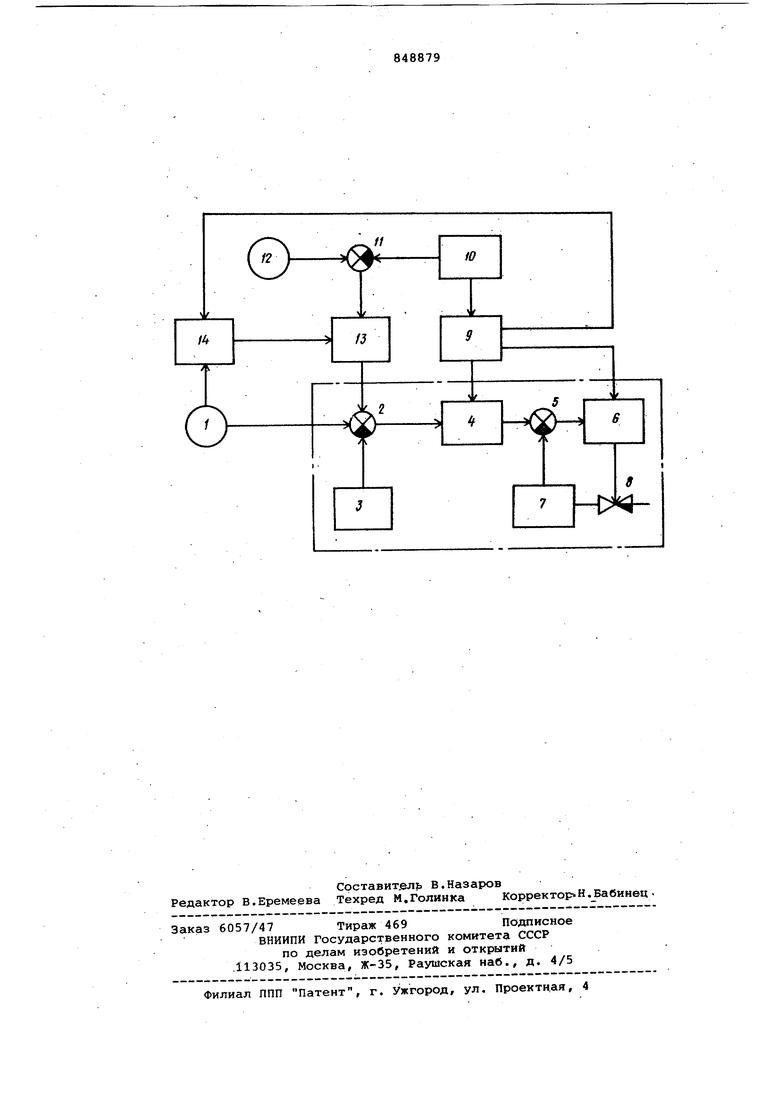
На чертеже представлена структурная схема устройства для реализации предлагаемого способа.
15
Устройство содержит последовательно включенные задатчик 1 регулируемого параметра, первый элемент 2 сравнения корректирующего регулятора, связанный с датчиком 3 регулиру20емого параметра пропорциональноинтегральный корректирующий регулятор 4,второй элемент 5 сравнения,стабилизирукиций регулятор 6,связанный с датчиком 7 стабилизируемой величины.Про25порционально-интегральный стабилизирующий регулятор 6, подключен к регулирующему органу 8 объекта регулирования. Динамические входы коррект 1рующего регулятора 4 и стаби30лизирующего регулятора 6 подключены
к выходам блока 9 коррекции параметров динамической настройки регуляторов 4 и 6, вход которого соединен с выходом датчика 10 нагрузки. Второй выход датчика 10 нагрузки соединен со входом третьего элемента 11 сравнения нагрузок, ко второму входу которого подключен задатчик 1-2, а выход соединен с исполнительным блоком 13, ко второму входу которого подключен задатчик 1 через дифференциатор 14, Выход исполнительного блока 13 соединен с первым элементом 2 сравнения- корректирующего регулятора 4,.Причем динамический вход дифференциатора 14 соединен с третьим выходом блока 9 коррекции параметров динамической настройки.
Способ осуществляется следующим образом.
На первый элемент 2 сравнения корректирукяцего регулятора 4 подают сигнал от датчика 3 регулируемого параметра. Сигнал,формируемый на выходе элемента 2 сравнения, через прюпорционально-интегральный корректирующий регулятор 4 поступает на вход второго элемента 5 сравнения стабилизирующего регулятора б, где сравнивается с поданным на второй вход этого элемента сигналом от датчика 7 стабилизируемой величины. Формируемый на выходе элемента 5 сра нения сигнал через пропорционально-интегральный стабилизирующий регулятор 6 воздействует на регулирующий орган 8 объекта. При изменении нагрузки объекта датчик 10 формирует сигнал, поступающий на вход блока 9 коррекции параметров динамической настройки, выходной сигнал которого автоматически корректирует параметры динамической, настройки корректирукядего регулятора 4 и стабилизирующего регулятора б в функции кй, приводя в соответствие настройки регуляторов изменившимся динамическим характеристикам объекта. Так как динамические характеристики теплоэнергетических объектов в диапазоне от 100 до 70% нагрузки изменяются незначительно, а в диапазоне от 100 до 50% ухудшаются примерно в два раза, то даже при оптимальной настройке регуляторов быстродействие системы снижается при 50%-ной нагрузке в два раза. Поэтому при нагрузках ниже 70% выходной сигнал третьего
элемента 11 управления нагрузок,формируемый как разность сигналов датчика 10 и задатчика 12, используют для подключения с помощью блока 13 выходного сигнала задатчика 1 основной регулируемой величины к элементу 2 сравнения корректирующего регулятора через дифференциатор 14, Причем третий выходной сигнал блока 9 коррекции параметров динамической настройки в функции нагрузки подают
0 на динамический вход дифференциатора 14 для подстройки постоянной времени дифференциатора, которая выбирается равной меньшей постоянной времени эквивалентного объекта регулирования корректирующего регулятора при единичном коэффициенте усиления дифференциатора..
Таким образом, по сравнению с известным способом постоянная времени
Q замкнутой системы уменьшается, что соответственно повышает быстродействие системы.
Формула изобретения
Способ каскадного регулирования технологического параметра теплоэнергетического объекта, преимущественно парогенератора, путем изменения
положения регулирующего органапо динамически преобразованной сумме отклонения стабилизируемой величины от заданного значения и корректирующего сигнала, пропорционального динамически преобразованному сигналу отклонения регулируемого параметра от сигнала задания, измерения нагрузки объекта, изменения по ней коэффициентов динамических преобразований и сравнения ее с заданной величиной,
отличающийся тем, что, с целью повышения быстродействия при пониженных нагрузках, сигнал задания дифференцируют с постоянной времени, зависящей от нагрузки объекта, и при
нагрузке объекта меньше заданной
величины корректируют отклонение регулируемого параметра по дифференцированному сигналу задания.
Источники информации,
принятые во внимание при экспертизе 1. Технико-экономический доклад. Совершенствование автоматизации ТЭС. Перспективный проект автоматизации мощного энергоблока. М., ТЭП, 1972, с. б2-бб, чертеж 740-к.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАСКАДНОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА ТЕПЛОЭНЕРГЕТИЧЕСКОГО ОБЪЕКТА | 1991 |
|
RU2049290C1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Автоматическая система регулирования с опережающим скоростным сигналом | 1981 |
|
SU991373A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Автомат-настройщик двухконтурных систем регулирования с опережающим сигналом | 1987 |
|
SU1624245A1 |
| Система регулирования мощности энергоблока | 1983 |
|
SU1078110A1 |
| Способ автоматического регулирования перетоков активной мощности и частоты энергообъединения | 1979 |
|
SU864427A1 |
| Система регулирования энергоблока | 1980 |
|
SU931920A1 |